JP2017126219A - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- JP2017126219A JP2017126219A JP2016005473A JP2016005473A JP2017126219A JP 2017126219 A JP2017126219 A JP 2017126219A JP 2016005473 A JP2016005473 A JP 2016005473A JP 2016005473 A JP2016005473 A JP 2016005473A JP 2017126219 A JP2017126219 A JP 2017126219A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- intersection
- driving support
- reliability
- map matching
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 claims description 49
- 238000004891 communication Methods 0.000 claims description 28
- 230000007704 transition Effects 0.000 claims description 5
- 238000012986 modification Methods 0.000 description 19
- 230000004048 modification Effects 0.000 description 19
- 230000002093 peripheral effect Effects 0.000 description 13
- 238000012545 processing Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/09626—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages where the origin of the information is within the own vehicle, e.g. a local storage device, digital map
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/163—Decentralised systems, e.g. inter-vehicle communication involving continuous checking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/024—Guidance services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/46—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for vehicle-to-vehicle communication [V2V]
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
【解決手段】マップマッチングの信頼度を逐次決定する信頼度決定部と、自車両予測軌道と周辺車両予測軌道との交点を含むように判定領域を設定する領域設定部と、マップマッチングの信頼度が高信頼度であることに基づいて、自車両の進行方向に存在する交差点ノードを決定する交差点ノード決定部と、判定領域内に交差点ノードがあるか否かを判定する判定部とを備える。判定領域内に交差点ノードがない場合、判定領域内に交差点ノードがある場合よりも運転支援レベルを運転支援が抑制されるレベルとし、マップマッチングの信頼度が低信頼度である場合、判定部による判定を行わずに、自車両予測軌道と周辺車両予測軌道に交点があるか否かに基づいて運転支援を実行するか否かを決定する。
【選択図】図6
Description
衛星航法システムが備える航法衛星が送信する航法信号を受信して決定した位置を逐次取得して、運転支援装置が用いられている車両である自車両の現在位置を逐次決定する自車位置決定部(S1)と、
自車両の現在位置の軌跡と道路形状との比較に基づいて自車両の現在位置を道路上に補正するマップマッチングの信頼度を逐次決定する信頼度決定部(S6)と、
自車両の現在位置と自車両の進行方位とから、自車両の今後の走行軌道である自車両予測軌道を予測する自車両予測部(S3)と、
自車両の周辺に存在している周辺車両の現在位置と周辺車両の進行方位とから予測される周辺車両の今後の走行軌道である周辺車両予測軌道を予測するための軌道予測情報を、自車両に備えられている車車間通信部から取得して、周辺車両の今後の走行軌道である周辺車両予測軌道を予測する周辺車両予測部(S5)と、
自車両予測軌道と周辺車両予測軌道に交点がある場合に、交点を含むように判定領域を設定する領域設定部(S13)と、
信頼度決定部が決定したマップマッチングの信頼度が、予め設定された高信頼度であることに基づいて、交差点を交差点ノードで表している道路地図情報から、マップマッチングにより決定した自車両の現在位置が位置する道路において、自車両の進行方向に存在する交差点ノードを決定する交差点ノード決定部(S9)と、
領域設定部が設定した判定領域内に、交差点ノード決定部が決定した交差点ノードがあるか否かを判定する判定部(S16)とを備え、
運転支援部は、
判定領域内に交差点ノードがない場合、判定領域内に交差点ノードがある場合よりも、運転支援レベルを運転支援が抑制されるレベルとし、
信頼度決定部が決定したマップマッチングの信頼度が、予め設定された低信頼度である場合、判定部による判定を行うことなく、自車位置決定部が決定した自車両の現在位置と自車両の進行方位とから自車両予測部が予測した自車両予測軌道と、周辺車両予測軌道に交点があるか否かに基づいて運転支援を実行するか否かを決定する。
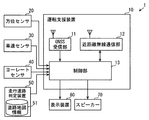
図2に示すように、運転支援システム1は、運転支援装置10、方位センサ20、車速センサ30、ヨーレートセンサ40、走行道路判定装置50、表示装置60、スピーカー70を備える。
制御部13は、図5、図6に示す処理を周期的に実行する。ステップ(以下、ステップを省略)S1では、自車両2の現在位置を、GNSS受信部11から取得する。この現在位置は、緯度、経度、高度により表されている。S1の処理により、制御部13は自車両2の現在位置を決定できるので、S1は請求項の自車位置決定部に相当する。
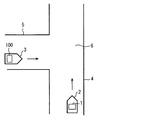
次に、S17を実行して運転支援を抑制する具体例を説明する。たとえば、図8に示すように、自車両2が走行する道路4に対して立体交差する道路7を周辺車両3が走行している場合、自車両2と周辺車両3は衝突する可能性はない。図8に示すように、判定領域B内には、交差点ノードAは存在していない。したがって、自車両予測軌道PHと周辺車両予測軌道PRとの交点Xが存在し、かつ、自車両2の通過所要時間と周辺車両3の通過所要時間との時間差が閾値以下であっても、S16の判断がNOになることにより、運転支援が抑制される。
次に、図8、図9とは反対に、運転支援を抑制しない具体例を説明する。図10に示すように、道路114と道路115が交差点116で交差しており、自車両2が交差点116に向かって道路114を走行しており、周辺車両3が交差点116に向かって道路115を走行しているとする。また、自車両2のマップマッチング状態はMM3であるとする。この状況では、S9において、交差点ノードA3が、直近の交差点として特定される。
以上、説明した本実施形態では、マップマッチング状態がMM3である場合には、S9を実行して、マップマッチングにより決定した自車両2の現在位置が位置する道路上における直近交差点の交差点ノードAを特定する。そして、この交差点ノードAが判定領域B内にあるか否かを判定している。
前述の実施形態では判定領域Bは四角形であったが、判定領域Bは、他の形状、たとえば、円形でもよい。
前述の実施形態では、S3において、自車両2が向いている絶対方位を表す直線を自車両2の進行方向として、自車両予測軌道PHを決定していた。しかし、自車両2が進行する方向として、自車両2の旋回半径Rの円弧であって、自車両2の現在位置を基点とし、自車両2において自車両2の前後方向線に接する円弧を用いてもよい。なお、自車両2の前後方向線は、自車両2の絶対方位を表す線である。また、自車両2の旋回半径Rは、車速をヨーレートで割ることで算出できる。
自車両2の場合と同様、周辺車両3についても、S5において、周辺車両3が進行する方向として、周辺車両3の旋回半径Rの円弧であって、周辺車両3の現在位置を基点とし、周辺車両3において周辺車両3の前後方向線に接する円弧を用いてもよい。なお、この変形例3では、周辺車両情報に含まれているヨーレートを使用して周辺車両予測軌道PRを決定することになる。この変形例3とは異なり、前述の実施形態においてはヨーレートを用いずに周辺車両予測軌道PRを決定している。したがって、前述の実施形態においては、周辺車両情報にヨーレートが含まれていなくてもよい。
前述の実施形態では、判定領域Bの各辺の長さLy1、Ly2、Lx1、Lx2は予め設定されていた。しかし、判定領域Bの辺の長さLx1、Lx2を、自車両2が走行する道路の道路幅あるいは車線数に応じて決定してもよいし、判定領域Bの辺の長さLy1、Ly2を、周辺車両3が走行する道路の道路幅あるいは車線数に応じて決定してもよい。なお、道路幅、車線数は、リンク情報に含まれている。
方位センサ20に代えて、逐次検出する自車両2の現在位置の変化から、自車両2の進行方位を決定してもよい。また、逐次検出する自車両2の現在位置の変化から、自車両2のヨーレートを算出してもよい。
通過所要時間の算出に加速度を用いてもよい。すなわち、自車両2の速度に加えて加速度を取得し、自車両2の加速度から自車両2の速度変化を予測して、自車両2が交点Xを通過する通過所要時間を決定する。また、周辺車両3の速度に加えて加速度を取得し、周辺車両3の加速度から周辺車両3の速度変化を予測して、周辺車両3が交点Xを通過する通過所要時間を決定する。このようにすれば、より精度よく、自車両2の通過所要時間と周辺車両3の通過所要時間を算出できる。
前述の実施形態では、判定領域B内に、直近の交差点の交差点ノードAがあるか否かを判断していたが、直近の交差点だけでなく、直近の交差点の一つ後に自車両2が通過する交差点についての交差点ノードAがあるか否かも判断してもよい。
前述の実施形態では、周辺車両3が送信した現在位置および絶対方位を用いて、自車両2が周辺車両予測軌道PRを決定していたが、周辺車両3が周辺車両予測軌道PRを逐次算出して送信してもよい。この場合には、周辺車両3が送信する周辺車両予測軌道PRが請求項の軌道予測情報に相当する。
前述の実施形態では、S16の判断がNOになり、S17を実行して運転支援レベルを低下させると、実質的には、S15の判断がNOである場合に実行するS12と同様、運転支援を実行しないことになる。
また、前述の実施形態において、S14、S15の処理をなしにしてもよい。
周辺車両3が備えている運転支援システム100は、前述した周辺車両情報を送信すればよい。したがって、運転支援システム100は、走行道路判定装置50を備えていなくてもよい。
前述の実施形態では、走行道路判定装置50が、マップマッチングを実施して自車両2が走行する道路を特定していた。しかし、運転支援装置10が、自車両2の現在位置に基づいて定まる自車両付近の道路地図情報を走行道路判定装置50から取得し、制御部13がマップマッチングを行ってもよい。また、運転支援装置10が道路地図情報を備えるようにすれば、道路地図情報を走行道路判定装置50から取得しなくてもよい。
前述の実施形態では、近距離無線通信部12を備えて、この近距離無線通信部12により、車車間通信を行っていた。しかし、近距離無線通信部12に加えて、あるいは、近距離無線通信部12に代えて、広域無線通信部を車車間通信部として備えていてもよい。
前述の実施形態では、自車両予測軌道PHを決定するために用いる自車両2の現在位置は、GNSS受信部11が算出した現在位置としていた。しかし、自車両予測軌道PHを決定するために用いる自車両2の現在位置は、マップマッチング状態がMM3であれば、マップマッチング後の現在位置としてもよい。
Claims (7)
- 車両で用いられ、前記車両の運転者の運転を支援する制御を行う運転支援部(S12、S17、S18)を備えた運転支援装置であって、
衛星航法システムが備える航法衛星が送信する航法信号を受信して決定した位置を逐次取得して、前記運転支援装置が用いられている前記車両である自車両の現在位置を逐次決定する自車位置決定部(S1)と、
前記自車両の現在位置の軌跡と道路形状との比較に基づいて前記自車両の現在位置を道路上に補正するマップマッチングの信頼度を逐次決定する信頼度決定部(S6)と、
前記自車両の現在位置と前記自車両の進行方位とから、前記自車両の今後の走行軌道である自車両予測軌道を予測する自車両予測部(S3)と、
前記自車両の周辺に存在している周辺車両の現在位置と前記周辺車両の進行方位とから予測される前記周辺車両の今後の走行軌道である周辺車両予測軌道を予測するための軌道予測情報を、前記自車両に備えられている車車間通信部から取得して、前記周辺車両の今後の走行軌道である周辺車両予測軌道を予測する周辺車両予測部(S5)と、
前記自車両予測軌道と前記周辺車両予測軌道に交点がある場合に、前記交点を含むように判定領域を設定する領域設定部(S13)と、
前記信頼度決定部が決定した前記マップマッチングの信頼度が、予め設定された高信頼度であることに基づいて、交差点を交差点ノードで表している道路地図情報から、前記マップマッチングにより決定した前記自車両の現在位置が位置する道路において、前記自車両の進行方向に存在する交差点ノードを決定する交差点ノード決定部(S9)と、
前記領域設定部が設定した前記判定領域内に、前記交差点ノード決定部が決定した前記交差点ノードがあるか否かを判定する判定部(S16)とを備え、
前記運転支援部は、
前記判定領域内に前記交差点ノードがない場合、前記判定領域内に前記交差点ノードがある場合よりも、運転支援レベルを運転支援が抑制されるレベルとし、
前記信頼度決定部が決定した前記マップマッチングの信頼度が、予め設定された低信頼度である場合、前記判定部による判定を行うことなく、前記自車位置決定部が決定した前記自車両の現在位置と前記自車両の進行方位とから前記自車両予測部が予測した前記自車両予測軌道と、前記周辺車両予測軌道に交点があるか否かに基づいて前記運転支援を実行するか否かを決定する運転支援装置。 - 請求項1において、
前記交点に前記自車両が到達するまでの時間と、前記交点に前記周辺車両が到達するまでの時間との時間差を算出する時間差算出部(S14)を備え、
前記運転支援部は、前記交点があるか否かと、前記判定部による判定結果と、前記マップマッチングの信頼度とに加えて、前記時間差算出部が算出した前記時間差に基づいて、前記運転支援のレベルを決定する運転支援装置。 - 請求項2において、
前記運転支援部は、前記判定部が前記判定領域内に前記交差点ノードがないと判断した場合に、前記時間差を用いずに、運転支援レベルを運転支援が抑制されるレベルとする運転支援装置。 - 請求項1〜3のいずれか1項において、
前記マップマッチングの状態には、前記自車両の現在位置を一つの道路上に確定できている確定状態と、前記自車両が位置する道路の候補として複数の道路が存在している複数候補状態があり、
前記信頼度決定部は、前記マップマッチングの状態が前記確定状態であれば、前記マップマッチングの信頼度を前記高信頼度とし、前記マップマッチングの状態が前記複数候補状態であれば、前記マップマッチングの信頼度を低信頼度とする運転支援装置。 - 請求項1〜3のいずれか1項において、
前記マップマッチングの状態には、前記自車両の現在位置を一つの道路上に確定できている確定状態と、前記自車両の現在位置を道路上に確定できていない未確定状態と、前記確定状態から前記未確定状態への移行過程である移行状態とがあり、
前記信頼度決定部は、前記マップマッチングの状態が前記確定状態であれば、前記マップマッチングの信頼度を前記高信頼度とし、前記マップマッチングの状態が前記未確定状態または前記移行状態であれば、前記マップマッチングの信頼度を低信頼度とする運転支援装置。 - 請求項1〜5のいずれか1項において、
前記運転支援部は、前記信頼度決定部が前記マップマッチングの信頼度を決定できていない場合に前記マップマッチングの信頼度を低信頼度とする運転支援装置。 - 請求項1〜6のいずれか1項において、
前記交差点ノード決定部は、前記自車両の進行方向において直近に存在する前記交差点ノードを決定する運転支援装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016005473A JP6520728B2 (ja) | 2016-01-14 | 2016-01-14 | 運転支援装置 |
| US15/401,141 US10269247B2 (en) | 2016-01-14 | 2017-01-09 | Drive support apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016005473A JP6520728B2 (ja) | 2016-01-14 | 2016-01-14 | 運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017126219A true JP2017126219A (ja) | 2017-07-20 |
| JP6520728B2 JP6520728B2 (ja) | 2019-05-29 |
Family
ID=59314864
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016005473A Active JP6520728B2 (ja) | 2016-01-14 | 2016-01-14 | 運転支援装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10269247B2 (ja) |
| JP (1) | JP6520728B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190078824A (ko) * | 2017-12-27 | 2019-07-05 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| JP2020039115A (ja) * | 2018-08-31 | 2020-03-12 | バイドゥ オンライン ネットワーク テクノロジー (ベイジン) カンパニー リミテッド | インテリジェント運転自動車のデータ伝送方法、装置及びデバイス |
| JP2020106979A (ja) * | 2018-12-26 | 2020-07-09 | 株式会社ゼンリンデータコム | 情報処理装置、情報処理方法及びプログラム |
| JP2020106338A (ja) * | 2018-12-26 | 2020-07-09 | 株式会社ゼンリンデータコム | 情報処理装置、情報処理方法及びプログラム |
| WO2020255296A1 (ja) | 2019-06-19 | 2020-12-24 | 三菱電機株式会社 | 相対位置判定装置、相対位置判定方法、および相対位置判定プログラム |
| WO2022137819A1 (ja) * | 2020-12-24 | 2022-06-30 | 本田技研工業株式会社 | 車両 |
| JP2022534517A (ja) * | 2019-06-04 | 2022-08-01 | 日立Astemo株式会社 | 車両走行制御装置、車両走行制御方法およびコンピュータプログラム製品 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10289115B2 (en) * | 2017-06-01 | 2019-05-14 | Aptiv Technologies Limited | Automated vehicle map localization based on observed geometries of roadways |
| KR102323394B1 (ko) * | 2018-01-22 | 2021-11-08 | 삼성전자주식회사 | 차량의 주행을 보조하는 장치 및 방법 |
| FR3120690B1 (fr) * | 2021-03-15 | 2023-02-10 | Psa Automobiles Sa | Procédé et dispositif de détermination d’une fiabilité d’une cartographie base définition. |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008097413A (ja) * | 2006-10-13 | 2008-04-24 | Mitsubishi Electric Corp | 安全支援情報提供車載システム |
| JP2010250616A (ja) * | 2009-04-16 | 2010-11-04 | Toyota Motor Corp | 走行支援装置 |
| JP2014157395A (ja) * | 2013-02-14 | 2014-08-28 | Denso Corp | 車両用運転支援システム及び運転支援方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3501009B2 (ja) | 1999-03-26 | 2004-02-23 | トヨタ自動車株式会社 | 車両衝突回避制御装置 |
| US6445308B1 (en) | 1999-01-12 | 2002-09-03 | Toyota Jidosha Kabushiki Kaisha | Positional data utilizing inter-vehicle communication method and traveling control apparatus |
| JP2006182207A (ja) | 2004-12-28 | 2006-07-13 | Masahiro Watanabe | 運転支援システム |
| JP2013134567A (ja) | 2011-12-26 | 2013-07-08 | Suzuki Motor Corp | 運転支援装置 |
-
2016
- 2016-01-14 JP JP2016005473A patent/JP6520728B2/ja active Active
-
2017
- 2017-01-09 US US15/401,141 patent/US10269247B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008097413A (ja) * | 2006-10-13 | 2008-04-24 | Mitsubishi Electric Corp | 安全支援情報提供車載システム |
| JP2010250616A (ja) * | 2009-04-16 | 2010-11-04 | Toyota Motor Corp | 走行支援装置 |
| JP2014157395A (ja) * | 2013-02-14 | 2014-08-28 | Denso Corp | 車両用運転支援システム及び運転支援方法 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190078824A (ko) * | 2017-12-27 | 2019-07-05 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| KR102464607B1 (ko) | 2017-12-27 | 2022-11-08 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| JP2020039115A (ja) * | 2018-08-31 | 2020-03-12 | バイドゥ オンライン ネットワーク テクノロジー (ベイジン) カンパニー リミテッド | インテリジェント運転自動車のデータ伝送方法、装置及びデバイス |
| US11374688B2 (en) | 2018-08-31 | 2022-06-28 | Apollo Intelligent Driving Technology (Beijing) Co., Ltd. | Data transmission method and device for intelligent driving vehicle, and device |
| JP7046452B2 (ja) | 2018-12-26 | 2022-04-04 | 株式会社ゼンリンデータコム | 情報処理装置、情報処理方法及びプログラム |
| JP7049242B2 (ja) | 2018-12-26 | 2022-04-06 | 株式会社ゼンリンデータコム | 情報処理装置、情報処理方法及びプログラム |
| JP2020106338A (ja) * | 2018-12-26 | 2020-07-09 | 株式会社ゼンリンデータコム | 情報処理装置、情報処理方法及びプログラム |
| JP2020106979A (ja) * | 2018-12-26 | 2020-07-09 | 株式会社ゼンリンデータコム | 情報処理装置、情報処理方法及びプログラム |
| JP2022534517A (ja) * | 2019-06-04 | 2022-08-01 | 日立Astemo株式会社 | 車両走行制御装置、車両走行制御方法およびコンピュータプログラム製品 |
| CN113994406A (zh) * | 2019-06-19 | 2022-01-28 | 三菱电机株式会社 | 相对位置判定装置、相对位置判定方法以及相对位置判定程序 |
| WO2020255296A1 (ja) | 2019-06-19 | 2020-12-24 | 三菱電機株式会社 | 相対位置判定装置、相対位置判定方法、および相対位置判定プログラム |
| CN113994406B (zh) * | 2019-06-19 | 2023-09-08 | 三菱电机株式会社 | 相对位置判定装置、相对位置判定方法以及存储介质 |
| US11915494B2 (en) | 2019-06-19 | 2024-02-27 | Mitsubishi Electric Corporation | Relative position determining apparatus, relative position determining method, and non-transitory computer readable recording medium |
| WO2022137819A1 (ja) * | 2020-12-24 | 2022-06-30 | 本田技研工業株式会社 | 車両 |
| JP7413572B2 (ja) | 2020-12-24 | 2024-01-15 | 本田技研工業株式会社 | 車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170206787A1 (en) | 2017-07-20 |
| US10269247B2 (en) | 2019-04-23 |
| JP6520728B2 (ja) | 2019-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6520728B2 (ja) | 運転支援装置 | |
| JP6468171B2 (ja) | 運転支援装置 | |
| JP6607155B2 (ja) | 運転支援装置 | |
| JP5472163B2 (ja) | 速度規制値通知装置及び速度規制値通知システム | |
| JP6520689B2 (ja) | 運転支援装置 | |
| JP6065889B2 (ja) | 運転支援装置 | |
| US9830822B2 (en) | Driving assistance apparatus | |
| JP2008065483A (ja) | 車両用運転支援システム | |
| JP2010108343A (ja) | 制御対象車両判定装置 | |
| JP4941174B2 (ja) | 停止目標位置検出装置及び停止目標位置検出方法 | |
| US10971014B2 (en) | Bollard receiver identification | |
| JP2006227690A (ja) | 衝突防止装置 | |
| JP2008197703A (ja) | 車両の情報提供装置 | |
| JP6137129B2 (ja) | 情報通知装置 | |
| JP5338384B2 (ja) | 車車間通信装置及び車車間通信方法 | |
| JP5014308B2 (ja) | 運転支援装置 | |
| JP6229882B2 (ja) | 車々間通信装置 | |
| JP4899936B2 (ja) | 交差点通過支援装置および交差点通過支援方法 | |
| CN108734998B (zh) | 驾驶辅助设备和驾驶辅助方法 | |
| JP2008287481A (ja) | 車両の走行支援装置 | |
| JP5692118B2 (ja) | 車両用通信装置及び交差点進入路判定システム | |
| JP5737032B2 (ja) | 車両位置特定装置 | |
| JP6599403B2 (ja) | 運転支援装置 | |
| JP6752514B2 (ja) | 運転支援装置および運転支援方法 | |
| JP2016091322A (ja) | 情報通知装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180409 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190415 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6520728 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |