JP2017123776A - 重機の制御 - Google Patents
重機の制御 Download PDFInfo
- Publication number
- JP2017123776A JP2017123776A JP2017039288A JP2017039288A JP2017123776A JP 2017123776 A JP2017123776 A JP 2017123776A JP 2017039288 A JP2017039288 A JP 2017039288A JP 2017039288 A JP2017039288 A JP 2017039288A JP 2017123776 A JP2017123776 A JP 2017123776A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- control
- control board
- work machine
- rotational speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/16—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters
- H02P1/166—Driving load with high inertia
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/16—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters
- H02P1/54—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters for starting two or more dynamo-electric motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/02—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using supply voltage with constant frequency and variable amplitude
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
- H02P5/74—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors controlling two or more AC dynamo-electric motors
- H02P5/747—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors controlling two or more AC dynamo-electric motors mechanically coupled by gearing
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Multiple Motors (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Electric Motors In General (AREA)
- Motor And Converter Starters (AREA)
- Control Of Velocity Or Acceleration (AREA)
- Control Of Eletrric Generators (AREA)
Abstract
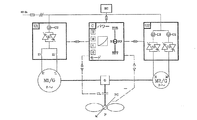
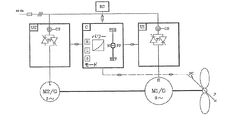
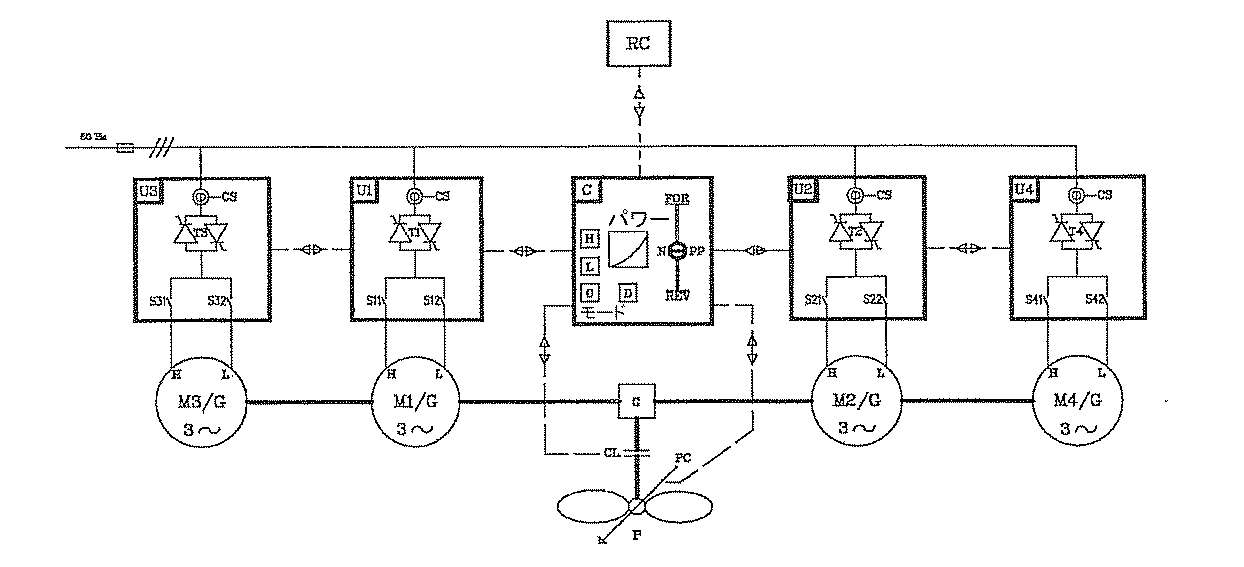
【解決手段】本発明は、回転作業機械Pは、少なくとも1台のモーターM1に連結され、前記モーターM1の回転速度は、制御システムCによって制御されるように構成されている。前記回転作業機械Pは、調整可能に構成された負荷制御PCを有し、前記制御システムCは、前記回転作業機械Pに接続されている。本発明により、選択可能な複数の回転速度の間でソフトに遷移を行うことができ、所要エネルギーの変更に合わせて前記モーターM1のサイズおよび回転速度をステップバイステップで調整してエネルギー消費を削減する。
【選択図】図1
Description
Claims (22)
- 回転速度およびパワーの制御のためのシステムであって、前記システムは、
外部電力源を介して動力供給されかつ回転作業機械を駆動する少なくとも1台のモーターと、
前記少なくとも1台のモーターにかつ前記回転作業機械に接続された制御システムと、
を備え、
前記回転作業機械は、前記少なくとも1台のモーターによって提供される回転速度で回転し、
前記少なくとも1台のモーターによって提供される回転速度は、前記制御システムによって制御され、
前記回転作業機械は、調整可能な負荷制御を備え、
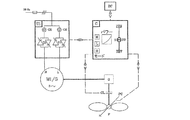
前記制御システムは、前記調整可能な負荷制御を制御し、かつ、始動時に前記少なくとも1台のモーターにソフトな加速を提供して、複数の選択可能な回転速度の間でのソフトな遷移およびより低いエネルギー消費を実現するように適合されている、システム。 - 前記制御システムは、第1の制御ボードに接続されかつ前記第1の制御ボードを制御するように構成され、
前記第1の制御ボードは、前記少なくとも1台のモーターに接続されかつ前記少なくとも1台のモーターを制御するように構成されている、
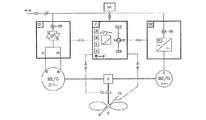
請求項1に記載のシステム。 - 前記第1の制御ボードは、少なくとも1組のサイリスタおよび少なくとも1つのセンサを備える、請求項2に記載のシステム。
- 前記第1の制御ボードは、少なくとも2つの接触子をさらに備える、請求項3に記載のシステム。
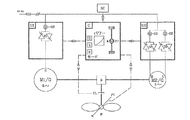
- 前記第1の制御ボードは、少なくとも2組のサイリスタおよび少なくとも2つのセンサを備える、請求項2に記載のシステム。
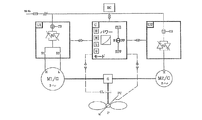
- 前記第1の制御ボードは、少なくとも1つの周波数変換器および少なくとも1つのセンサを備える、請求項2に記載のシステム。
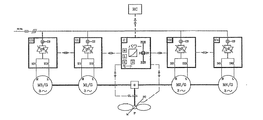
- 前記システムは、シャフトを介して相互連結された第1のモーターおよび第2のモーターを備え、前記第2のモーターは、前記第1のモーターが高速の回転速度に達するのを支援するように構成されている、請求項1に記載のシステム。
- 前記第1のモーターおよび前記第2のモーターは、それぞれ、第1の制御ボードおよび第2の制御ボードに接続され、かつ、前記第1の制御ボードおよび前記第2の制御ボードによって制御されるように構成されている、請求項7に記載のシステム。
- 前記第1のモーターは少なくとも1種類の第1の速度で回転し、前記第2のモーターは少なくとも1種類の第2の速度で回転する、請求項7に記載のシステム。
- 前記第1のモーターは、前記第2のモーターのパワーより3〜10倍大きいパワーを備える、請求項7に記載のシステム。
- 前記少なくとも1組のサイリスタは、三相の逆並列接続されたサイリスタまたは相当するパワー半導体を備える、請求項3に記載のシステム。
- 50Hzの周波数を有する外部電力源を備える、請求項1に記載のシステム。
- 前記回転作業機械は100kWより大きいパワーを備える、請求項1に記載のシステム。
- 少なくとも1つのクラッチを備える、請求項1に記載のシステム。
- 前記回転作業機械はギアに接続され、
前記ギアは前記少なくとも1台のモーターに接続されている、
請求項1に記載のシステム。 - 前記回転作業機械はギアに接続され、
前記ギアは前記第1のモーターおよび前記第2のモーターに接続されている、
請求項7に記載のシステム。 - 遠隔制御システムを備える、請求項1に記載のシステム。
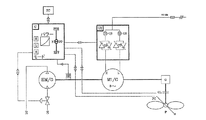
- 前記少なくとも1台のモーターは、シャフトを介して非電気式のモーターに接続され、前記非電気式のモーターは、前記制御システムによって制御されている、請求項1に記載のシステム。
- 前記非電気式のモーターは、動力源によって駆動される、請求項18に記載のシステム。
- 前記非電気式のモーターは、回転速度センサに接続されている、請求項18に記載のシステム。
- 前記少なくとも1台のモーターのうちの少なくとも1台は、発電機として動作するように適合されている、請求項1に記載のシステム。
- 回転速度およびパワーの制御のためのシステムであって、前記システムは、
外部電力源を介して動力供給されかつ回転作業機械を駆動する少なくとも1台のモーターと、
前記少なくとも1台のモーターにかつ前記回転作業機械に接続された制御システムであって、前記制御システムは、第1の制御ボードに接続されかつ前記第1の制御ボードを制御するように構成され、前記第1の制御ボードは、少なくとも1組のサイリスタおよび少なくとも1つのセンサを備える、制御システムと、
を備え、
前記少なくとも1組のサイリスタは、三相の逆並列接続されたサイリスタであり、
前記回転作業機械は、前記少なくとも1台のモーターによって提供される回転速度で回転し、
前記少なくとも1台のモーターによって提供される回転速度は、前記制御システムによって制御され、
前記回転作業機械は、調整可能な負荷制御を備え、
前記制御システムは、前記調整可能な負荷制御を制御し、かつ、前記少なくとも1台のモーターにソフトな加速を提供して、複数の選択可能な回転速度の間での始動時のソフトな遷移およびより低いエネルギー消費を実現するように適合されている、システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NO20075383 | 2007-10-22 | ||
| NO20075383A NO20075383A (no) | 2007-10-22 | 2007-10-22 | Regulering av tyngre maskiner |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010529890A Division JP6159051B2 (ja) | 2007-10-22 | 2008-10-22 | 重機の制御 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017123776A true JP2017123776A (ja) | 2017-07-13 |
| JP6345289B2 JP6345289B2 (ja) | 2018-06-20 |
Family
ID=40020104
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010529890A Active JP6159051B2 (ja) | 2007-10-22 | 2008-10-22 | 重機の制御 |
| JP2017039288A Active JP6345289B2 (ja) | 2007-10-22 | 2017-03-02 | 重機の制御 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010529890A Active JP6159051B2 (ja) | 2007-10-22 | 2008-10-22 | 重機の制御 |
Country Status (14)
| Country | Link |
|---|---|
| US (2) | US8648553B2 (ja) |
| EP (1) | EP2210337A2 (ja) |
| JP (2) | JP6159051B2 (ja) |
| KR (1) | KR101751063B1 (ja) |
| CN (1) | CN101874345B (ja) |
| AU (1) | AU2008317568B2 (ja) |
| BR (1) | BRPI0819096B1 (ja) |
| CA (1) | CA2702529C (ja) |
| EA (1) | EA023464B1 (ja) |
| IL (1) | IL205062A0 (ja) |
| NO (1) | NO20075383A (ja) |
| NZ (1) | NZ585486A (ja) |
| SG (1) | SG185323A1 (ja) |
| WO (1) | WO2009054727A2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10352484B2 (en) | 2004-08-05 | 2019-07-16 | Faurecia Emissions Control Technologies Germany Gmbh | Exhaust system |
| US8519662B2 (en) * | 2010-05-26 | 2013-08-27 | Rockwell Technologies, Inc. | Method and apparatus for controlling motor torque |
| CN103847530B (zh) | 2012-12-03 | 2017-04-12 | 通用电气公司 | 电驱动系统及其能量管理方法 |
| US9923431B2 (en) | 2014-12-15 | 2018-03-20 | Rolls-Royce Plc | Variable speed drive arrangement |
| KR102594072B1 (ko) * | 2020-01-02 | 2023-10-24 | 세메스 주식회사 | 반도체 제조 설비의 구동 장치 및 반도체 제조 설비의 구동 방법 |
| KR102651695B1 (ko) | 2022-02-13 | 2024-03-29 | 에스티엑스엔진 주식회사 | 클러치와 극수 변환 전동기를 이용한 회전 속도 제어 시스템 |
| NO347394B1 (no) | 2022-07-07 | 2023-10-16 | In Motion As | System for å drive elektriske motorer |
| CN221591293U (zh) * | 2023-11-09 | 2024-08-23 | 广东澳运科技有限公司 | 一种风扇的控制电路 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06225589A (ja) * | 1993-01-26 | 1994-08-12 | Motor Jidosha Kk | 複合電動機システムの駆動制御装置 |
| JPH07322660A (ja) * | 1994-05-18 | 1995-12-08 | Ebara Corp | 電動機の制御方法 |
| JPH0923672A (ja) * | 1995-05-03 | 1997-01-21 | Toshio Furukawa | モーター始動装置 |
| US5841264A (en) * | 1994-06-22 | 1998-11-24 | Claude Caen | Method of stepwise voltage control for supplying an induction motor |
| JPH10337063A (ja) * | 1997-06-05 | 1998-12-18 | Hirohito Sato | 交流電動機の始動方法及び装置 |
| JP2004532595A (ja) * | 2001-04-20 | 2004-10-21 | アロイス・ヴォベン | 風力タービンの操作方法 |
| JP2009514117A (ja) * | 2005-11-01 | 2009-04-02 | インターナショナル・ビジネス・マシーンズ・コーポレーション | ホスト・グリッド上の資源のキャパシティ・プラニング及び使用可能性通知のための方法及び装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB101809A (en) | 1916-01-13 | 1917-01-11 | John Mould | Improvements in or relating to the Starting of Synchronous Dynamo-electric Machinery and to Means therefor. |
| GB539203A (en) | 1939-03-31 | 1941-09-01 | Igranic Electric Co Ltd | Improvements in or relating to drives of the two electric motor type for printing presses and other machines |
| US2397183A (en) * | 1943-08-17 | 1946-03-26 | Westinghouse Electric Corp | Fluid impeller drive |
| US4525655A (en) | 1979-11-23 | 1985-06-25 | Walker David E | Two stage electric drive |
| JPS62146892A (ja) * | 1985-12-20 | 1987-06-30 | 三菱電機株式会社 | エスカレ−タの運転制御装置 |
| AU616885B2 (en) * | 1987-03-24 | 1991-11-14 | John Van Der Wolf | Electric generator |
| US5961558A (en) * | 1994-11-04 | 1999-10-05 | Kvaerner Asa | Control device for achieving optimum use of the energy which is produced by a vessel's main energy source |
| AUPN422295A0 (en) * | 1995-07-18 | 1995-08-10 | Bytecraft Research Pty. Ltd. | Control system |
| US5637976A (en) * | 1995-09-29 | 1997-06-10 | Allen-Bradley Company, Inc. | Method and apparatus for RMS current measurement in induction motors without a current transformer |
| JPH09117170A (ja) * | 1995-10-16 | 1997-05-02 | Toshio Furukawa | モーター始動装置 |
| US5767637A (en) * | 1996-05-02 | 1998-06-16 | Chrysler Corporation | Controller for turboal ternator |
| US6320273B1 (en) * | 2000-02-12 | 2001-11-20 | Otilio Nemec | Large vertical-axis variable-pitch wind turbine |
| DE10061578A1 (de) | 2000-12-11 | 2002-06-27 | Siemens Ag | Hybridantrieb für Schiffe |
| DE10119624A1 (de) * | 2001-04-20 | 2002-11-21 | Aloys Wobben | Verfahren zum Betreiben einer Windenergieanlage |
| JP4024537B2 (ja) * | 2001-12-28 | 2007-12-19 | 山洋電気株式会社 | 交流発電機の出力電力のサイクル制御装置 |
| JP4118726B2 (ja) * | 2003-04-01 | 2008-07-16 | 株式会社北川鉄工所 | 乾燥装置およびその乾燥方法 |
| US20060275121A1 (en) * | 2003-04-17 | 2006-12-07 | Merswolka Paul H/F And Meyer Charles F | Wind turbine with friction drive power take off on outer rim |
| JP4258262B2 (ja) * | 2003-04-22 | 2009-04-30 | 株式会社安川電機 | ツイン同期制御方法及び装置 |
| US7042110B2 (en) * | 2003-05-07 | 2006-05-09 | Clipper Windpower Technology, Inc. | Variable speed distributed drive train wind turbine system |
| ITVA20040055A1 (it) * | 2004-11-23 | 2005-02-23 | St Microelectronics Srl | Metodo e circuito di controllo di un impianto di generazione di energia elettrica |
| US7588108B2 (en) * | 2005-03-16 | 2009-09-15 | Takayuki Miyao | Method of controlling vehicle driving system |
| US7262516B2 (en) * | 2005-07-15 | 2007-08-28 | General Electric Company | Methods and systems for operating engine generator sets |
| JP2007071197A (ja) * | 2005-08-11 | 2007-03-22 | Yanmar Co Ltd | ハイブリッド型油圧作業機 |
| US7615304B2 (en) * | 2005-10-28 | 2009-11-10 | General Electric Company | SOFC systems to power a liquid or gas fuel pumping station |
| DE102006040929B4 (de) * | 2006-08-31 | 2009-11-19 | Nordex Energy Gmbh | Verfahren zum Betrieb einer Windenergieanlage mit einem Synchrongenerator und einem Überlagerungsgetriebe |
| US20080075597A1 (en) * | 2006-09-22 | 2008-03-27 | Charles Brocklehurst | Systems for powering remote-controlled aircraft |
-
2007
- 2007-10-22 NO NO20075383A patent/NO20075383A/no unknown
-
2008
- 2008-10-22 WO PCT/NO2008/000373 patent/WO2009054727A2/en not_active Ceased
- 2008-10-22 BR BRPI0819096-8A patent/BRPI0819096B1/pt active IP Right Grant
- 2008-10-22 CN CN2008801125098A patent/CN101874345B/zh active Active
- 2008-10-22 SG SG2012078077A patent/SG185323A1/en unknown
- 2008-10-22 KR KR1020107011098A patent/KR101751063B1/ko active Active
- 2008-10-22 AU AU2008317568A patent/AU2008317568B2/en active Active
- 2008-10-22 EP EP08841620A patent/EP2210337A2/en not_active Withdrawn
- 2008-10-22 US US12/738,961 patent/US8648553B2/en active Active
- 2008-10-22 JP JP2010529890A patent/JP6159051B2/ja active Active
- 2008-10-22 EA EA201000676A patent/EA023464B1/ru not_active IP Right Cessation
- 2008-10-22 NZ NZ585486A patent/NZ585486A/en unknown
- 2008-10-22 CA CA2702529A patent/CA2702529C/en active Active
-
2010
- 2010-04-13 IL IL205062A patent/IL205062A0/en unknown
-
2013
- 2013-03-05 US US13/786,166 patent/US9614464B2/en active Active
-
2017
- 2017-03-02 JP JP2017039288A patent/JP6345289B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06225589A (ja) * | 1993-01-26 | 1994-08-12 | Motor Jidosha Kk | 複合電動機システムの駆動制御装置 |
| JPH07322660A (ja) * | 1994-05-18 | 1995-12-08 | Ebara Corp | 電動機の制御方法 |
| US5841264A (en) * | 1994-06-22 | 1998-11-24 | Claude Caen | Method of stepwise voltage control for supplying an induction motor |
| JPH0923672A (ja) * | 1995-05-03 | 1997-01-21 | Toshio Furukawa | モーター始動装置 |
| JPH10337063A (ja) * | 1997-06-05 | 1998-12-18 | Hirohito Sato | 交流電動機の始動方法及び装置 |
| JP2004532595A (ja) * | 2001-04-20 | 2004-10-21 | アロイス・ヴォベン | 風力タービンの操作方法 |
| JP2009514117A (ja) * | 2005-11-01 | 2009-04-02 | インターナショナル・ビジネス・マシーンズ・コーポレーション | ホスト・グリッド上の資源のキャパシティ・プラニング及び使用可能性通知のための方法及び装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130293162A1 (en) | 2013-11-07 |
| EA023464B1 (ru) | 2016-06-30 |
| AU2008317568A1 (en) | 2009-04-30 |
| CN101874345B (zh) | 2013-05-15 |
| US9614464B2 (en) | 2017-04-04 |
| NO326193B1 (no) | 2008-10-13 |
| CA2702529A1 (en) | 2009-04-30 |
| BRPI0819096A2 (pt) | 2015-09-08 |
| AU2008317568B2 (en) | 2013-08-22 |
| WO2009054727A3 (en) | 2009-09-24 |
| SG185323A1 (en) | 2012-11-29 |
| JP6159051B2 (ja) | 2017-07-05 |
| US20100219777A1 (en) | 2010-09-02 |
| CA2702529C (en) | 2016-10-11 |
| JP2011501642A (ja) | 2011-01-06 |
| NO20075383A (no) | 2008-10-13 |
| JP6345289B2 (ja) | 2018-06-20 |
| WO2009054727A2 (en) | 2009-04-30 |
| EP2210337A2 (en) | 2010-07-28 |
| KR20100084556A (ko) | 2010-07-26 |
| EA201000676A1 (ru) | 2010-12-30 |
| NZ585486A (en) | 2012-06-29 |
| KR101751063B1 (ko) | 2017-06-26 |
| IL205062A0 (en) | 2010-11-30 |
| US8648553B2 (en) | 2014-02-11 |
| BRPI0819096B1 (pt) | 2019-05-14 |
| CN101874345A (zh) | 2010-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6345289B2 (ja) | 重機の制御 | |
| JP5291880B2 (ja) | 船用推進システム | |
| US10633228B2 (en) | Crane | |
| JP2001500356A (ja) | 原動機とインバータ/整流器を備えた非同期機械を含む独立した電気システム | |
| US11040762B2 (en) | Marine parallel propulsion system | |
| JP2008207799A (ja) | 船舶推進システム及びそれを作動させる方法 | |
| EP1589630A2 (en) | Protection for wind power station | |
| WO2009091940A1 (en) | A system having a variable frequency power distribution bus for driving a variable speed motor | |
| JP6925596B2 (ja) | 船舶推進装置 | |
| CN110155289A (zh) | 一种混合动力船舶胀套式联合推进系统及方法 | |
| JP2017539198A (ja) | 発電システム | |
| RU2392180C1 (ru) | Гребная электрическая установка (варианты) | |
| JP2012245886A (ja) | 船舶用主機の余剰エネルギー回収システム | |
| JP2002089286A (ja) | タービン発電装置 | |
| JP2624275B2 (ja) | 蒸気タービン用油ポンプの運転方法及び運転装置 | |
| JP2004304889A (ja) | 風力発電装置および風力発電装置の制動制御方法 | |
| JP2017015027A (ja) | ポンプ駆動機構 | |
| CN100438316C (zh) | 减小风能设备中传动支路转速的方法及相应风能设备 | |
| JPH0224913Y2 (ja) | ||
| RU2392179C1 (ru) | Электрическая гребная установка (варианты) | |
| JP3424397B2 (ja) | 自動極数切替風力発電装置 | |
| JP2004173426A (ja) | 電力融通装置及びその運転方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170620 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180118 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20180226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180501 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180522 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6345289 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |