以下、本発明の実施の形態について、図を参照して詳細に説明する。なお、以下に示す実施の形態においては、同一のまたは共通する部分について図中同一の符号を付し、その説明は繰り返さない。
(実施の形態1)
本実施の形態に係る送風装置は、使用者への不快感を軽減しつつ、室内の中央に向けて空気を十分に送風することを主たる目的とするものである。
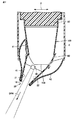
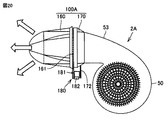
図1および図2は、本実施の形態に係る送風装置の斜視図および正面図である。図3は、図2に示すIII−III線に沿った断面図である。図1から図3を参照して、本実施の形態に係る送風装置1について説明する。
図1から図3に示すように、本実施の形態に係る送風装置1は、送風ユニット2と、当該送風ユニット2を収容する筐体10と、人検知センサ30と、制御部5(図11参照)と、を備える。
筐体10の正面側には、開口部14が設けられている。開口部14は、筐体10の正面側の上方に位置する。開口部14は、正面側から見た場合に上下方向(Z軸方向)に延在する長辺と左右方向(図中X軸方向)に延在する短辺とを有する。筐体10の側面の一方側(右側)には、吸込口11が設けられている。
開口部14の長辺側からは、後述する風向調整ユニット3が、送風下流側(図中Y軸負方向)に向けて突出している。
人検知センサ30は、人の有無を検知するものである。人検知センサ30は、焦電特性を利用して様々な物体から放出される赤外線を検出するセンサである。
図3に示すように、送風ユニット2は、送風機51と、送風機側ダクト53と、イオン発生装置60と、吹出ダクト100と、吹出口100A1と、風向調整ユニット3と、送風機駆動部50(図11参照)とを含む。
送風機51は、吸込口11から送風装置1外部の空気を取り込み、取り込んだ空気を吹出口100A1に向けて送出する。送風機51は、回転軸がX軸方向と略平行になるように配置されている。送風機51としては、シロッコファン、プロペラファン、ターボファン形式の送風機を採用することができる。送風機51は、送風機駆動部50によって駆動される。
吹出ダクト100は、イオン発生装置60を介して送風機側ダクト53に接続されている。イオン発生装置60には、後述する送風空間64a,64b(図9参照)が形成されており、この送風空間64a,64bによって吹出ダクト100の内部と送風機側ダクト53の内部とが連通している。
このように、吹出ダクト100と送風機側ダクト53とを接続することにより、送風経路52を規定するダクト4が構成される。
ダクト4には、吸気口7が設けられている。吸気口7は吸込口11に連通するように設けられている。なお、ダクト4は、吹出ダクト100と送風機側ダクト53が一体に形成されることにより構成されていてもよい。
吹出口100A1は、送風下流側における吹出ダクト100の開口端によって規定される。吹出口100A1は、その法線方向から見た場合に略矩形形状を有する。吹出口100A1は、送風機51から送風された空気を外部に向けて吹き出す。吹出口100A1の送風下流側には、風向調整ユニット3が設けられている。風向調整ユニット3は、吹出ダクト100の開口端部近傍に接続される。
吹出ダクト100内には、防護網(不図示)が配置されている。防護網は、吹出口100A1の送風上流側に配置されている。防護網は、外部から指などの異物が進入するのを防ぐために設けられている。
イオン発生装置60は、イオンを発生させ、送風機によって送風される空気に対してイオンを放出する。放出されたイオンは、ダクト4中を通り、吹出口100A1から外部に吹出される。イオン発生装置60は、ダクト4に対して着脱自在に取り付けられる。また、イオン発生装置60は、たとえば長手方向がZ軸方向に沿うようにダクト4に組み付けられている。
図4は、本実施の形態に係る送風ユニットの斜視図である。図5は、本実施の形態に係る風向調整ユニットの斜視図である。図4および図5を参照して、本実施の形態に係る送風ユニット2および風向調整ユニット3について説明する。
図4および図5に示すように、風向調整ユニット3は、風向調整部20、第1漏気防止板部81、第2漏気防止板部82、風向調整部駆動部としての駆動機構6および位置検出センサ31を含む。風向調整ユニット3は、吹出ダクト100に回動可能に取り付けられている。
風向調整部20は、互いに離間して対向配置される第1風向調整板部21および第2風向調整板部22と、これらの基端部21a,22aの一端側同士および他端側同士を第1風向調整板部21および第2風向調整板部22が並ぶ方向に亘って接続する接続部23とを含む。
第1風向調整板部21および第2風向調整板部22は、送風下流側に向かうにつれて第1風向調整板部21と第2風向調整板部22との間の間隔が狭くなるように傾斜して配置されている。第1風向調整板部21および第2風向調整板部22は、送風上流側に位置する基端部21a,22aの幅に比べて送風下流側に向かうにつれて幅W1が狭くなっている。
第1風向調整板部21および第2風向調整板部22は、たとえば、半円形状、半楕円形状、半多角形状に形成され、互いに鏡面対称に形成されていることが好ましい。第1風向調整板部21および第2風向調整板部22は、一定の角度を有するように傾斜して配置されてもよいし、より空気抵抗を低減させるために湾曲して折り曲げられもよいし、段階的に折り曲げられるように構成されていてもよい。
吹出ダクト100の開口端部100A2における短辺側には、送風下流側に向けて延在する支持部101が設けられている。支持部101に風向調整部20の接続部23が回動可能に支持される。
第1漏気防止板部81は、第1風向調整板部21と吹出ダクト100との間の隙間を覆いつつ第1風向調整板部21の回動に対して追従可能に構成されている。第1漏気防止板部81は、第1風向調整板部21と吹出ダクト100との間の隙間を覆うことにより、吹出ダクト100から吹き出される空気の漏れを抑制できるとともに、当該空気を第1風向調整板部21と第2風向調整板部22との間の空間に向けて案内することができる。
第2漏気防止板部82は、第2風向調整板部22と吹出ダクト100との間の隙間を覆いつつ第2風向調整板部22の回動に対して追従可能に構成されている。第2漏気防止板部82は、第2風向調整板部22と吹出ダクト100との間の隙間を覆うことにより、吹出ダクト100から吹き出される空気の漏れを抑制できるとともに、当該空気を第1風向調整板部21と第2風向調整板部22との間の空間に向けて案内することができる。
駆動機構6は、吹出口100A1の短辺側を規定する吹出ダクト100の側面に設けられている。駆動機構6は、風向調整部20を第1風向調整板部21および第2風向調整板部22の幅方向と平行な方向に延びる軸線を中心軸として揺動させる。具体的には、駆動機構6は、風向調整部20を左右方向に揺動させる。
位置検出センサ31は、発光部32、受光部33、導光部34を含む。発光部32は、略正面方向に出射光を出射する。受光部33は、たとえば風向調整部20の接続部23上に設けられている。発光部32は、風向調整部20の揺動に伴って同時に揺動する。発光部32が揺動することにより、出射方向が変更される。
なお、発光部32が設けられる場所は、風向調整部20の接続部23上に限定されず、揺動可能な部分(揺動部)であれば適宜設置することができる。
受光部33は、発光部32から出射された出射光を受光する。受光部33は、吹出ダクト100の外周面上に設けられている。吹出ダクト100自体は、揺動しないため、受光部33の位置も変動しない。
なお、受光部33が設けられる場所は、吹出ダクト100の外周面上に限定されず、発光部32からの出射光を受光可能であり、揺動しない部分(非揺動部)に適宜設置することができる。受光部33は、たとえば筐体10に設けられていてもよい。
導光部34は、発光部32から出射された出射光を受光部33に導く。導光部34は、発光部32の出射範囲内に設けられている。導光部34は、後述する複数の導光経路35〜37(図10参照)を有する。なお、導光部34の詳細については、図10を用いて後述する。
図6から図8は、風向調整部が第1の位置、第2の位置、および第3の位置にある状態を示す模式断面図である。図6から図8を参照して、風向調整ユニット3の動作および人検知センサ30の検知範囲について説明する。
図6から図8に示すように、人検知センサ30は、第1風向調整板部21および第2風向調整板部22の送風下流側に位置する先端部よりも後退した送風経路内に設けられることにより、風向調整部20の揺動方向における検知範囲が制限される。
図6に示すように、風向調整部20が第1の位置として正面に配置される場合には、第1風向調整板部21および第2風向調整板部22が正面を向く。
この際、第1風向調整板部21および第2風向調整板部22は、吹出ダクト100の側壁部から離れて位置するが、第1漏気防止板部81および第2漏気防止板部82によって第1風向調整板部21および第2風向調整板部22と上記側壁部との間の隙間が覆われる。これにより、前方(図中矢印DR3方向)に向けて空気が送風される。
人検知センサ30は、第1風向調整板部21および第2風向調整板部22との間を通過する赤外線を検知することにより、人を検知することができることとなる。これにより、人検知センサ30は、第1風向調整板部21および第2風向調整板部22によってその検知範囲が正面方向の数度の範囲に制限される。
図7に示すように、風向調整部20が第2の位置として左側(第1風向調整板部21側)の回動終端位置に配置される場合には、第1風向調整板部21および第2風向調整板部22が正面左側方向(図中DR4方向)に向く。
この際、第1風向調整板部21の後端側がDR1方向(紙面垂直方向)に沿って、吹出ダクト100の正面左側の側壁部の前端側に接触することにより、第1風向調整板部21と当該側壁部とが連続する。一方、第2風向調整板部22は、吹出ダクト100の正面右側の側壁部から離れて位置するが、第2漏気防止板部82によって第2風向調整板部22と当該側壁部との間の隙間が覆われる。これにより、正面左側方向(図中DR4方向)に向けて空気が送風される。
人検知センサ30は、第1風向調整板部21および第2風向調整板部22との間を通過する赤外線を検知することにより、人を検知することができることとなる。これにより、人検知センサ30は、第1風向調整板部21および第2風向調整板部22によってその検知範囲が正面左側方向(図中DR4方向)の数度の範囲に制限される。
図8に示すように、風向調整部20が第3の位置としての右側(第2風向調整板部22側)の回動終端位置に配置される場合には、第1風向調整板部21および第2風向調整板部22が正面右側方向(図中DR5方向)に向く。
この際、第2風向調整板部22の後端側がDR1方向に沿って吹出ダクト100の正面右側の側壁部の前端側に接触することにより、第2風向調整板部22と当該側壁部とが連続する。一方、第1風向調整板部21は、正面左側の側壁部から離れて位置するが、第1漏気防止板部81によって第1風向調整板部21と当該側壁部との間の隙間が覆われる。これにより、正面右側方向(図中DR5方向)に向けて空気が送風される。
この場合においても、人検知センサ30は、第1風向調整板部21および第2風向調整板部22との間を通過する赤外線を検知することにより、人を検知することができることとなる。これにより、人検知センサ30は、第1風向調整板部21および第2風向調整板部22によってその検知範囲が正面右側方向(図中DR5方向)の数度の範囲に制限される。
本発明で人検知センサとして使用する焦電式赤外線センサは、検知範囲内に存在する物体が発する赤外線を受動的に検出するため、一般的にレンズで集光する構造を採り、検出範囲を広くしている。市販されているものは、赤外線センサの正面に向かって開き角度50度〜70度の円錐形の内側を検出可能にしていることが多く、広い範囲の人検知には適している。上記のような構造とすることで、一般的な焦電式赤外線センサを使用しながら精度よく人の存在場所が検知できる。
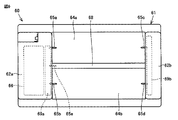
図9は、本実施の形態に係るイオン発生装置の上面図である。図9を参照して、本実施の形態に係るイオン発生装置60について説明する。
図9に示すように、イオン発生装置60は、ケース61と、放電電極65a〜65dと、誘導電極(対向電極)65eと、高電圧発生回路部66と、基板69aと、基板69bとを含む。
ケース61は、上部ケースと下部ケースとによって構成されている。上部ケースは、収容部62a,62bを有する。収容部62aと下部ケースとの間の収容空間には、放電電極65a,65bおよび誘導電極65eを固定する基板69aと、高電圧発生回路部66とが収容される。収容部62bと下部ケースとの間の収容空間には、放電電極65c,65dを固定する基板69bが収容される。
上記の収容部62aと下部ケースとの間の収容空間と、収容部62bと下部ケースとの間の収容空間とを連通する連通部68を挟んで、ケース61の内周面によって送風空間64a,64bが形成されている。
放電電極65aおよび放電電極65cは、その先端が送風空間64aに位置するように、ケース61に収容されている。また、放電電極65aと放電電極65cは、電極の中心軸が互いに同一直線上に位置するように、対向して配置される。
放電電極65bおよび放電電極65dは、その先端が送風空間64bに位置するようにケース61に収容されている。また、放電電極65bと放電電極65dは、電極の中心軸が互いに同一直線上に位置するように対向して配置される。
これら放電電極65a〜65dは、先端が尖鋭化された針形状を有する。放電電極65a〜65dは、同一平面内に設けられている。放電電極65a〜65dは、各電極の中心軸が互いに平行となるように配置されている。
放電電極65aと放電電極65bとは、電極の中心軸に直交する方向に離間して並んでいる。放電電極65cと放電電極65dとは、電極の中心軸に直交する方向に離間して並んでいる。
誘導電極65eは、放電電極65aと放電電極65bとの間に配置されている。誘導電極65eは、放電電極65aおよび放電電極65bから互いに等しい距離となる位置に設けられ、放電電極65cおよび放電電極65dから互いに等しい距離となる位置に設けられている。
放電電極65aと放電電極65cとは、互いに異なる極性のイオンを発生させ、放電電極65bと放電電極65dとは、互いに異なる極性のイオンを発生させる。放電電極65aと放電電極65bとは、互いに異なる極性のイオンを発生させ、放電電極65cと放電電極65dとは、互いに異なる極性のイオンを発生させる。
放電電極65aに正または負の高電圧が印加され、放電電極65bに負または正の高電圧が印加されると、これら放電電極と誘導電極65eとの間にコロナ放電が発生し、プラスイオンおよびマイナスイオンが発生する。同様に、放電電極65cに負または正の高電圧が印加され、放電電極65dに正または負の高電圧が印加されると、これら放電電極と誘導電極65eとの間にコロナ放電が発生し、マイナスイオンおよびプラスイオンが発生する。
放電電極65a〜65dのそれぞれは、高電圧発生回路部66と電気的に接続されており、高電圧発生回路部66によって発生された高電圧が放電電極65a〜65dに印加される。
プラスイオンは、主としてH+(H2O)nから成り、マイナスイオンは主としてO2−(H2O)mから成る。n、mは整数である。プラスイオンとマイナスイオンが空気中の浮遊菌や臭気成分の表面に凝集すると、化学反応によって活性種である過酸化水素水H2O2または水酸基ラジカル[・OH]が生成される。過酸化水素や水酸基ラジカルは極めて強力な活性を有するため、浮遊菌や臭気成分は破壊される。
図10は、位置検出センサに含まれる導光部の構成を示す模式図である。図10を参照して、位置検出センサ31に含まれる導光部34について説明する。
導光部34は、複数の導光経路35〜37を有する。複数の導光経路35〜37のそれぞれは、揺動部の位置に対応して設けられている。具体的には、複数の導光経路35〜37のそれぞれは、揺動部に設けられた発光部32が揺動部の揺動に伴って揺動する揺動範囲内から選択された複数の検出位置に対応して設けられている。複数の導光経路35〜37のそれぞれは、対応する検出位置に位置する発光部32から出射される出射光を受入可能に設けられている。
複数の導光経路35〜37のそれぞれは、発光部32からの出射された出射光が受光部33に到達するまでの出射光の減衰率が互いに異なるように設けられている。複数の導光経路35〜37は、出射光を受け入れる入口部と出射光を受光部33に導出する出口部とを含む筒状形状を有する。
複数の導光経路35〜37は、導光部34を加工して設けられてもよいし、導光部34と一体に成形してもよい。また、複数の導光経路35〜37は、光ファイバケーブル等によって構成されていてもよい。この際、各導光経路35〜37に互いに透過率の異なるフィルタを設置することが好ましい。また、図10では、3方向が検出可能となっているがさらに細分化して多方向を検出してもよい。
図11は、本実施の形態に係る送風装置の構成を示すブロック図である。図11を参照して、本実施の形態に係る送風装置1の構成について説明する。
制御部5は、駆動機構6を駆動させ、風向調整部20を揺動させる。制御部5には、人検知センサ30によって検知された検知結果が入力される。制御部5は、人検知センサ30によって検知された検知結果に基づいて、送風機駆動部50の動作を制御する。
制御部5には、位置検出センサ31からの検出結果が入力される。制御部5は、位置検出センサ31によって検出された受光量に基づいて風向調整部20の位置を検出する。
図12は、室内に空気を送風する際の風向および風量の第1例を示す模式図である。図12においては、室内を上方から見た場合を図示している。図13は、人検知センサを用いて風量を調整する際の第1例を示すフロー図である。図12および図13を参照して、人検知センサを用いて風量を調整する際の第1例について説明する。
図12に示すように、送風装置1は、室内200の一方側の側壁200a側における中央に配置されている。送風装置1の正面に人Pがいる。送風装置1は、風向調整部20が送風装置1の正面を向く場合には、風量1で送風し、風向調整部20が正面左側方向または正面右側方向を向く場合には、風量2で送風する。風量2は、風量1よりも大きい。
図13に示すように、制御部5に風向調整部20の揺動運転開始の信号が入力される。これにより、工程(S1)にて、制御部5は、所定の風量(風量2)が送風されるように風向調整部20を揺動させる。次に、工程(S2)にて、制御部5は、風向調整部20が揺動した方向に人がいるか否かを検知する。
工程(S2)にて、風向調整部20が揺動した方向に人がいると判断された場合(工程(S2);YES)には、工程(S3)が実施される。工程(S3)では、制御部5は、所定の風量2から風量を減少させるように、送風機駆動部50の動作を制御する。すなわち、送風装置1は、風量2よりも風量が小さい風量1にて空気を送出する。
工程(S2)にて、風向調整部20が揺動した方向に人がいないと判断された場合(工程(S2);NO)には、工程(S4)が実施される。工程(S4)では、制御部5は、風量が予め設定された当初の風量2となるように、送風機駆動部50の動作を制御する。すなわち、送風装置1は、所定の風量2で空気を送出する。
工程(S3)または工程(S4)が実施された後には、工程(S5)にて、制御部5は、風向調整部20の揺動運動終了の信号が入力されたかを確認する。工程(S5)にて、揺動運動終了の信号が入力されたと制御部5が判断した場合(工程(S5);YES)には、揺動運動が終了する。一方、工程(S5)にて、揺動運動終了の信号が検知されるまで、工程(S2)から工程(S5)までの動作を繰り返し実施する。
図14は、室内に空気を送風する際の風向および風量の第2例を示す模式図である。図14においては、室内を上方から見た場合を図示している。図15は、人検知センサを用いて風量を調整する際の第2例を示すフロー図である。図14および図15を参照して、人検知センサを用いて風量を調整する際の第2例について説明する。
図14に示すように、送風装置1は、室内200の一方側の側壁200a側における中央に配置されている。送風装置1の正面に人Pがいる。送風装置1は、風向調整部20が送風装置1の正面を向く場合には、風量3で送風し、風向調整部20が正面左側方向または正面右側方向を向く場合には、風量4で送風する。風量4は、風量3よりも大きい。
図15に示すように、制御部5に風向調整部20の揺動運転開始の信号が入力される。これにより、工程(S1)にて、制御部5は、所定の風量(風量3)が送風されるように風向調整部20を揺動させる。次に、工程(S2)にて、制御部5は、風向調整部20が揺動した方向に人がいるか否かを検知する。
工程(S2)にて、風向調整部20が揺動した方向に人がいると判断された場合(工程(S2);YES)には、工程(S3A)が実施される。工程(S3A)では、制御部5は、所定の風量で送風するように、送風機駆動部50の動作を制御する。すなわち、送風装置1は、所定の風量3で空気を送出する。
工程(S2)にて、風向調整部20が揺動した方向に人がいないと判断された場合(工程(S2);NO)には、工程(S4A)が実施される。工程(S4A)では、制御部5は、所定の風量3から風量を増加させるように、送風機駆動部50の動作を制御する。すなわち、送風装置1は、所定の風量3よりも大きい風量4にて空気を送出する。
工程(S3A)または工程(S4A)が実施された後には、工程(S5)にて、制御部5は、風向調整部20の揺動運動終了の信号が入力されたかを確認する。工程(S5)にて、揺動運動終了の信号が入力されたと制御部5が判断した場合(工程(S5);YES)には、揺動運動が終了する。一方、工程(S5)にて、揺動運動終了の信号が検知されるまで、工程(S2)から工程(S5)までの動作を繰り返し実施する。
このように、本実施の形態に係る送風装置1にあっては、制御部5が、人検知センサ30によって人が検知された場合に、人検知センサ30の検知結果に基づいて、人の検知された方向に吹出される空気の吹出量が、人の検知されていない方向に吹出される空気の吹出量よりも相対的に小さくなるように、送風機駆動部の動作を制御することにより、使用者への不快感を軽減しつつ、室内の中央に向けて空気を十分に送風することができる。これにより、イオンを室内に十分に拡散させることできる。
一般的に、位置検知機能を有さない構成において、揺動部を揺動初期位置に移動させる場合には、揺動部を一度動かなくなるまで揺動方向に揺動させる。そして、揺動部が動かなくなった位置から所定のステップ数に基づいてステッピングモータを駆動させることにより、所望の向きに揺動部を移動せることができる。
揺動部が動かなくなる位置までこれを移動させるには、規定の位置まで揺動部が移動されたかを確認するすべはなく、所望の向きに揺動を移動させたい場合にずれが発生する。
ここで、扇風機の首等の揺動する物の位置を検知可能な位置検出センサが開示された文献として、たとえば、特開平7−23480号公報(特許文献3)、特開2008−8849号公報(特許文献4)が挙げられる。
しかしながら、特許文献3に記載の位置検出センサでは、入射角を演算する演算処理が複雑であり、回路基板の構成が複雑となる。特許文献4の位置検出センサでは受光素子を複数用いる必要があるため、製造コストが増加するとともに構成が複雑となる。
このため、位置検出センサやこれを備える送風装置等にあっては、簡素な構成で揺動部の位置を容易に検出できる構成が要求されるところである。
本実施の形態においては、上述のように、位置検出センサ31が、単数の発光部32と単数の受光部33とを備え、所定の検出位置に位置する発光部32から出射された出射光が、検出位置に対応した導光経路を通過することにより、異なる検出位置から出射された出射光が、異なる受光量で受光部33に受光される構成とすることにより、簡素な構成で揺動部の位置を容易に検出することもできる。
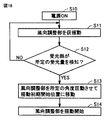
図16は、位置検出センサを用いて風向調整部の揺動初期位置を決定する際のフロー図である。図16を参照して、位置検出センサ31を用いて風向調整部20の揺動初期位置を決定する際のフローについて説明する。
図16に示すように、まず、工程(S10)において、電源がONされ、制御部5が各種駆動部の動作を制御できる状態となる。また、位置検出センサ31の発光部32から出射光が出射される。続いて、工程(S11)において、制御部5は、風向調整部駆動部としての駆動機構6を駆動させて、風向調整部20を所定の方向に仮に揺動させる。これにより、風向調整部20とともに発光部32が揺動する。
次に、工程(S12)において、位置検出センサ31の受光部33が所定の受光量を受光したか否かを判断する。上述のように、複数の導光経路35〜37は、受光部33に到達する出射光の減衰率が異なるように構成されているため、受光部33が受光した受光量が所定の値であることを判断することにより、制御部5は、風向調整部20の位置を検出することができる。
工程(S12)にて、受光部33が所定の受光量を受光したと判断した場合(工程(S12);YES)には、工程(S13)が実施される。一方、工程(S12)にて、受光部33が所定の受光量を受光していないと判断した場合(工程(S12);NO)には、受光部33が所定の受光量を受光したと判断されるまで、工程(S11)を実施する。
工程(S13)においては、制御部5は、位置検出センサ31によって検知された受光量に基づいて駆動機構6の動作を制御する。具体的には、制御部5は、駆動モータとしてのステッピングモータを所定のステップ数回転するように駆動機構6の動作を制御する。すなわち、制御部5は、風向調整部20を所定の角度、回動させてこれを揺動初期位置に移動させる。揺動初期位置は、風向調整ユニット3の揺動可能な範囲の中心位置であることが好ましい。
このように、所定の検出位置に位置する発光部32から出射される出射光が、検出位置に対応する導光経路を通過することにより、他の検出位置に位置する発光部32から出射光と異なる受光量で受光される。これにより、複雑な演算処理が必要とならず、簡易な構成で風向調整部20の揺動位置を容易に検出することができる。
また、実施の形態にあっては、風向調整部20が動かなくなる位置までこれを移動させることにより風向調整部20の位置を検出する場合と比較して、揺動位置を検出するまでの移動範囲を狭くすることができる。この結果、風向調整部20の揺動初期位置の調整時間を短縮することができるとともに、風向調整部20が動かなくなる位置まで移動させた際に発生する異音の発生を抑制することができる。さらには、制御上は十分回転させているはずなのに、揺動部の位置を検知出来なかった場合に、センサ異常又は構造異常(ギア欠け等)の自己診断が可能となる。
なお、本実施の形態においては、位置検出センサ31を用いて揺動初期位置を設定する場合を例示して説明したがこれに限定されず、位置検出センサ31に検出された位置情報に基づいて、揺動速度を変更してもよい。
たとえば、揺動部の重心が中心からずれており、正面(第1の位置)から左側の回動終端位置(第2の位置)に動くまでの負荷が、正面(第1の位置)から右側の回動終端位置(第3の位置)に動くまでの負荷が大きくなる場合には、同一出力で駆動機構6を駆動させると、第1の位置と第2の位置との間の揺動部の移動時間が、第1の位置と第3の位置との間の揺動部の移動時間が長くなる。
このような場合には、第1の位置と第2の位置との間を揺動部が移動する際における駆動機構6の出力を、第1の位置と第3の位置との間を揺動部が移動する際における駆動機構6の出力を大きくすることにより、第1の位置と第2の位置との間の揺動部の移動時間と、第1の位置と第3の位置との間の揺動部の移動時間とを同一にすることができる。
以上のように、本実施の形態に係る送風装置1にあっては、人検知センサ30を第1風向調整板部21および第2風向調整板部22の送風下流側に位置する先端部よりも後退した送風経路内に設けられることにより、風向調整部20の揺動方向における検知範囲を制限する。検知範囲を狭めることにより、人がいる方向をより特定することができる。これにより、送風装置1の設置場所から見てどの方角に人がいるのかを正確に検知することができる。
また、制御部5は、人検知センサ30によって人が検知された場合に、人検知センサ30の検知結果に基づいて、人の検知された方向に吹出される空気の吹出量が、人の検知されていない方向に吹出される空気の吹出量よりも相対的に小さくなるように、送風機駆動部の動作を制御する。
このように、人が検知された方向に送風される風量が、人が検知されていない方向に送風される風量よりも小さくすることにより、使用者に当たる風量を小さくすることができる。これにより、使用者の不快感を軽減することができる。
また、上記のように検知範囲を狭め、人がいる方向をより特定することにより、風向調整部の揺動範囲において、風量を小さくする範囲も小さくすることができる。風量を小さくする範囲を小さくしつつ、前方方向に空気を送風することにより、室内の中央に向けて空気を十分に送風することができる。これにより、イオンを室内に十分に拡散させることができる。
また、上述のような構成を有する位置検出センサ31を設けることにより、簡素な構成で揺動部の位置を容易に検出することもできる。
(実施の形態2)
本実施の形態に係る送風装置1Aは、一つの吹出口から広範囲に空気を送風することを目的の一つとして構成されている。
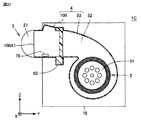
図17から図19は、本実施の形態に係る送風装置の正面図、上面図および側面図である。図17から図19を参照して、本実施の形態に係る送風装置1Aについて説明する。
図17から図19に示すように、本実施の形態に係る送風装置1Aは、実施の形態1に係る送風装置1と比較した場合に、風向調整部20Aの構成が相違する。
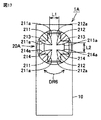
風向調整部20Aは、送風下流側から見た場合に、第1送風領域と第2送風領域とが交差することにより構成される略十字形状の送風経路を形成している。風向調整部20Aは、第1風向調整板部211、第2風向調整板部212、第3風向調整板部213、および第4風向調整板部214を含む。
第1風向調整板部211および第2風向調整板部212は、互いに対向するように配置されている。第1風向調整板部211および第2風向調整板部212によって、上記略十字形状の送風経路のうちの一方である第1送風領域が形成される。
第1風向調整板部211および第2風向調整板部212は、互いに対向する一対の対向面211a,212aを有する。互いに対向する一対の対向面211a,212aによって第1送風領域が規定される。
互いに対向する一対の対向面211a,212aの間の間隔L1は、送風下流側に向かうにつれて狭くなる。また、第1風向調整板部211および第2風向調整板部212の幅(L2方向の長さ)も、送風下流側に向かうにつれて狭くなる。
第1風向調整板部211および第2風向調整板部212の間隔L1および幅が、送風下流側に向かうにつれて狭くなることにより、図19の矢印に示すように、縦方向に扁平かつ扇形状に拡散された空気が、第1風向調整板部211と第2風向調整板部212との間から送出される。また、送風機から送出する風量を増加させることなく、吹出口から吹き出される空気の風速を速くすることができる。
第3風向調整板部213および第4風向調整板部214は、互いに対向するように配置されている。第3風向調整板部213および第4風向調整板部214によって、上記略十字形状の送風経路のうちの他方である第2送風領域が形成される。
第3風向調整板部213および第4風向調整板部214は、互いに対向する一対の対向面213a,214aを有する。互いに対向する一対の対向面213a,214aによって第2送風領域が規定される。
互いに対向する一対の対向面213a,214aの間の間隔L2は、送風下流側に向かうにつれて狭くなる。また、第3風向調整板部213および第4風向調整板部214の幅も、送風下流側に向かうにつれて狭くなる。
第3風向調整板部213および第4風向調整板部214の間隔および幅が、送風下流側に向かうにつれて狭くなることにより、図18の矢印に示すように、横方向に扁平かつ扇形状に拡散された空気が、第3風向調整板部213と第4風向調整板部214との間から送出される。また、送風機から送出する風量を増加させることなく、吹出口から吹き出される空気の風速を速くすることができる。
このように、第1風向調整板部211および第2風向調整板部212から横方向に広がる空気が送風され、第3風向調整板部213および第4風向調整板部214から縦方向に広がる空気が送風されることにより、一つの吹出口から広範囲に空気を送風することができる。これによって、特定の方向に風速を速くして送風することができ、到達距離が長くできるとともに高濃度のイオンを届けることができる。
図20は、本実施の形態に係る送風ユニットの側面図である。図20を参照して、送風ユニット2Aについて説明する。
送風ユニット2Aは、実施の形態1に係る送風ユニット2と比較した場合に、上述のように風向調整部20Aが構成されている点風向調整部20Aが吹出ダクト100Aの開口端部の開口面の法線が延在する方向と平行な方向に延びる軸線を回動中心として回動可能に構成されている点、および吹出ダクト100の構成が相違する。その他の構成については、ほぼ同様である。
吹出ダクト100Aは、前方に位置する第1ダクト160と、後方に位置する第2ダクト170とを含む。第2ダクト170は、送風機側ダクト53に嵌め込まれることにより固定される。第2ダクト170は、第1ダクト160と送風機側ダクト53とを接続する。
第1ダクト160の後端側は、第2ダクト170の前端側に回動可能に嵌め込まれている。第1ダクト160の外周面には、外周ギア部161が設けられている。
駆動機構180は、吹出ダクト100Aの外表面のうち下方側に位置する外表面に固定されている。駆動機構180は、当該外周ギア部161と、これに噛合するギア部181と、ギア部181を回動駆動する駆動モータ182とを含む。駆動モータ182が駆動することにより、ギア部181が駆動モータ182の軸周りに回動する。ギア部181によって駆動モータ182の回動が外周ギア部161に伝達されることにより、第1ダクト160が図17中DR6方向に回動する。第1ダクト160に一体となって、当該第1ダクト160の先端に取り付けられた風向調整部20が回動する。
図20に示すように、第2ダクト170の外表面のうち下方側に位置する外表面には、駆動モータ182を指示するモータ支持部172が設けられている。モータ支持部172はネジ穴を有する。駆動モータ182は、固定するための部材として、当該ネジ穴に対応するリング状部分を有する。当該リング状部分がモータ支持部172にネジ留めされることにより、駆動モータ182がモータ支持部172に支持される。
風向調整部20Aが上記軸線を回動中心として回動することにより、十字状の空気が回動しながら送出される。これにより、さらに広範囲に亘って空気を送風することができる。
(実施の形態3)
本実施の形態に係る送風装置は、イオンの有無の判定精度を向上させることを主たる目的とするものである。
図21は、本実施の形態に係る送風装置1Cの断面図である。図21を参照して、本実施の形態に係る送風装置1Cについて説明する。
図21に示すように、本実施の形態に係る送風装置1Cは、実施の形態1に係る送風装置1と比較した場合に、湿度測定部78(図23参照)およびイオン検出部70をさらに備える点において相違する。イオン検出部70は、イオン発生装置60よりも送風方向下流側に位置する送風経路内に設けられている。湿度測定部78は、たとえば、吸込口の近傍に設けられる。
図22は、イオン検出部に具備される回路基板の部品搭載面側およびイオン集電面側を示す平面図である。図22(A)は、イオン検出部の回路基板の部品搭載面側を示す図であり、図22(B)は、イオン検出部の回路基板のイオン集電面側を示す図である。
図22に示すように、イオン検出部70は、センサー基板71、集電電極72、計測部73を含む。センサー基板71は、イオンを集電する側に位置するイオン集電面71aおよび部品を搭載する側に位置する部品搭載面71bを含む。イオン集電面71aは、部品搭載面71bの反対側に位置する。
集電電極72は、イオン集電面71aに設けられている。集電電極72は、イオンが吸着することにより電荷を集める。集電電極72は、たとえば略矩形形状に形成されるが、電荷を集めることができる限り、その形状を適宜変更することができる。また、集電電極72は、スルーホール72aによって部品搭載面71b側の電極72bに導通している。
また、センサー基板71のイオン集電面71aには、集電電極72を保護する保護部79が設けられている。保護部79が、人の指が集電電極72に触れないように設けられている。保護部79は、樹脂材料によって構成されている。
図23は、イオン検出部の構成、制御部および湿度測定部を示すブロック図である。図23を参照して、イオン検出部70の構成、制御部5および湿度測定部78について説明する。
図23に示すように、イオン検出部70は、集電電極72、計測部73、A/D変換部74、算出部76および表示部77を有する。
集電電極72は、空気中のイオンの電荷を収集する。イオンを吸着するために集電電極72は、一定の正電位を与えられている。計測部73は、集電電極72の電位を計測する。計測部73は、積分回路73a(図24を参照)を有し、集電電極72に接続されており、集電電極72の電位を計測して電圧信号として出力する。なお、積分回路73aの詳細な構成については、図24を用いて後述する。
A/D変換部74は、計測部73にて計測したアナログの電圧をデジタルの電圧に変換する。A/D変換部74により出力されるデジタルの電圧は、算出部76に入力される。算出部76は、A/D変換部74により出力されるデジタルの電圧に基づいてイオンの量を算出する。表示部77は、算出部76によって算出したイオンの量ならびに後述する判断部8による判断結果を表示する。
制御部5は、算出部76および判断部8を含む。判断部8は、イオン検出部70による検出結果と、所定の閾値を比較することによりイオン発生装置60からのイオンの発生の有無を判断する。具体的には、A/D変換部74から入力された出力電圧が、所定の閾値よりも大きい場合に、判断部8は、イオンが発生していると判断する。
制御部5には、湿度測定部78により測定された湿度情報が入力される。制御部5は、この湿度情報に基づいて後述する所定の閾値を設定することができる。また、制御部5は、この湿度情報に基づいて、後述するイオン発生装置60の駆動停止時間を設定することができる。
湿度測定部78は、高分子抵抗式の湿度センサであり、高分子膜による水分の吸収及び放出に伴う電気的特性(抵抗値)の変化を利用して湿度を検出するものである。ただし湿度測定部78は、高分子抵抗式の湿度センサに限るものではなく、高分子容量式の湿度センサ、セラミックなどを用いた金属酸化物系の湿度センサ、又は塩化リチウムなどを利用した電解質系の湿度センサ等の他の湿度センサであってもよい。湿度測定部78により測定された湿度情報は、制御部5に入力される。
図24は、イオン検出部に具備される積分回路の構成例を示す回路図である。図24を参照して、積分回路73aについて説明する。
積分回路73aはオペアンプ731と、容量可変のコンデンサ732と、スイッチ733とを含んでいる。オペアンプ731は、反転入力端子が集電電極72に接続するとともにコンデンサ732を介して出力端子に接続し、非反転入力端子が接地してある。スイッチ733はコンデンサ732に並列に接続してある。
イオンの量を測定する場合、スイッチ733がオフとされ、集電電極72に収集されたマイナスイオンの電荷がコンデンサ732蓄積される。収集されたイオンの量に比例したアナログの電圧信号がオペアンプ731の出力端子から出力され、一定の時間を経て、スイッチ733がオンとされ、コンデンサ732に蓄積している電荷が放電され、計測が終了する。スイッチのオンは、リセット信号が入力されることにより行われる。
図25は、リセット波形を示す図である。図25を参照して、リセット波形について説明する。図25に示すように、リセット信号は、1秒ごとに入力される。リセット信号が入力され、スイッチがONとなり、コンデンサ732に蓄積された電荷が放電される。電荷が放電されるとすぐに、スイッチがオフされ、測定可能な状態となる。
図26は、イオン検出部による出力の湿度依存性を示すグラフである。図26を参照して、イオン検出部70による出力の湿度依存性について説明する。
図26は、周囲の湿度が異なる環境でイオン発生装置60を駆動して図24に示した回路でイオン測定をした後に、イオン発生装置60を停止した時点の出力電圧を始点として、イオン検出部70の出力電圧の変化を時間経過とともに観測したグラフである。
図26に示すように、イオン検出部による出力は、湿度に影響される。湿度が高くなるほど、イオン検出部70周辺の帯電が緩和されるために空気中に含まれるイオンが集電電極72に付着しやすくなる。そのため、発生させたイオンの量が同じであっても、湿度が高いほど、イオン発生装置60を停止させる直前の集電電極72の電圧が基準電圧から大きくかい離している。よって、イオン発生装置60を停止した後、復帰した電圧幅が大きく観測される。つまり、グラフ上のイオン検出部70による出力電圧は高くなっている。
たとえば、送風機51を駆動させた状態でイオン発生装置60の駆動を15秒停止させた場合におけるイオン検出部による出力は、湿度が90%RHの場合には略1.5Vであり、湿度が70%RHの場合には略0.9Vであり、湿度が50%RHの場合には、略0.55Vであり、湿度が20%RHの場合には、略0.25Vである。
このように、イオン発生装置60の駆動停止時間を一定とした場合には、湿度が高くなるにつれてイオン検出部70による出力が高くなる。したがって、湿度に応じて変動する空気中のイオンによる出力値にイオン発生装置から発生させる所望のイオン量に応じた出力値を加算した値を閾値として、この閾値と、イオン発生装置から付与されたイオンと元々空気中に含まれたイオンとによって得られる検出値(出力値)とを比較することにより、イオン発生装置によるイオン発生の有無を検知することができる。
また、湿度が高くなるほど、空気中に含まれるイオンが集電電極72に付着しやすくなるため、同じ出力を得ようとした場合に、湿度が高いほど、イオン発生装置60の駆動を停止させる時間(駆動停止時間)が短くなる。
たとえば、略0.25Vの出力を得たい場合には、湿度が90%RHの場合にはイオン発生装置60の駆動を略0.5秒停止させ、湿度が70%RHの場合にはイオン発生装置60の駆動を略2秒停止させ、湿度が50%RHの場合にはイオン発生装置60の駆動を略4.2秒停止させ、湿度が20%RHの場合には、イオン発生装置60の駆動を略15秒停止させる。
図27は、イオンを検出する際のフローの一例を示す図である。図27を参照して、イオンを検出する際のフローの一例について説明する。
図27に示すように、イオン発生装置60によるイオンの発生の有無を検出する際には、まず、工程(S21)にて、制御部5は、測定時間になったか否かを判断する。測定時間になったと判断された場合(工程(S21);YES)には、工程(S22)が実施される。一方、測定時間になっていないと判断した場合(工程(S21);NO)には、イオン発生装置60を駆動させつつ、送風機51を駆動させながら、測定時間が到来するまで待機する。
工程(S22)においては、送風機51を駆動させた状態で、イオン発生装置60の駆動を停止する。これにより、送風機51からの送風される空気によって、保護部79等に付着したイオンを除去することができる。このように、保護部79に付着したイオンを除去することにより、保護部79の形状等を適宜変更することができ、設計の自由度が向上する。
次に、工程(S23)において、イオン発生装置60の駆動停止時間が所定の時間経過したか否かを判断する。ここで、イオン発生装置60の駆動停止時間は、湿度測定部78によって測定された湿度情報に関わらず一定の時間としてもよいし、当該湿度情報に応じて決定されてもよい。湿度情報に応じて駆動停止時間を決定する場合には、制御部5は、湿度が高い場合に上記駆動停止時間が短くなり、湿度が低い場合に上記駆動停止時間が長くなる相関関係を有するように、上記湿度測定部により計測された湿度に基づいて、上記駆動停止時間を設定する。
イオン発生装置60の駆動停止時間が所定の時間経過したと判断された場合(工程(S23);YES)には、工程(S24)が実施される。一方、イオン発生装置60の駆動停止時間が所定の時間経過していないと判断された場合(工程(S23);NO)には、上記駆動停止時間が所定の時間経過するまで、送風機51を駆動させ、イオン発生装置60の駆動を停止した状態を維持する。
工程(S24)では、送風機51を駆動させた状態で、停止されていたイオン発生装置60を駆動させる。続いて、工程(S25)にて、イオン測定を開始する。
次に、工程(S26)にて、イオンが付着した集電電極72の電位に基づいてA/D変換部74から出力された出力値(出力電圧)と、上述の閾値とを判断部8が比較することにより、イオン発生装置60からイオン発生の有無を判断する。
なお、閾値は、イオン発生装置60の駆動停止時間が湿度に関わらず一定の値とされた場合には、湿度測定部78による湿度情報に応じて決定される。この際、制御部5は、湿度が高い場合に上記閾値が大きくなり、湿度が低い場合に上記閾値が小さくなる相関関係を有するように、上記湿度測定部により計測された湿度に基づいて、上記閾値を設定する。すなわち、制御部5は、湿度が高くなるにつれて、閾値が大きくなるように当該閾値を設定する。
一方、閾値は、イオン発生装置60の駆動停止時間が上記湿度情報に応じて決定された場合には、当該閾値は一定の値に設定される。
工程(S26)にて、A/D変換部74から出力された出力電圧が、閾値よりも大きく、イオン発生装置60からのイオンの発生が有ると判断された場合には、イオンが正常に発生されている旨を表示部77に表示する。当該表示は、青色、緑色等のランプが点灯することにより行なわれてもよい。また、イオン発生装置60からのイオンの発生が有りと判断された場合には、所定の時間が経過した後に、工程(S21)からの動作を繰り返し実施する。
一方、工程(S26)にて、A/D変換部74から出力された出力電圧が、閾値よりも小さく、イオン発生装置60からのイオンの発生が無いと判断された場合には、工程(S27)にてイオンが発生されていない旨の警告を表示部77に表示する。当該表示は、赤色等のランプが点灯することにより行われてもよい。
以上のように、本実施の形態に係る送風装置1Cは、吹出口100A1および吸込口を接続する送風経路52と、送風経路52内に配置され、吸込口から吸込んだ空気を吹出口100A1に送風する送風機51と、送風経路52内にイオンを発生させるイオン発生装置60と、イオン発生装置60によってイオンが付与された空気に含まれるイオンを検出するイオン検出部70と、送風経路52を通過する空気の湿度を測定する湿度測定部78と、送風機51を駆動させた状態でイオン発生装置60の駆動を所定の時間停止させた後に、イオン発生装置60を駆動してイオン検出部70によるイオン検出を行ない、イオン検出部70によって検出された検出結果と所定の閾値とを比較することによりイオン発生装置60からのイオン生成の有無を判断する判断部8と、イオン発生装置60の駆動停止時間または上記閾値を可変に制御する制御部5と、を備え、制御部が、湿度測定部78により計測された湿度に基づいて、イオン発生装置60の駆動停止時間または上記閾値を設定する。
このように、送風機51を駆動させた状態でイオン発生装置60の駆動を所定の時間停止させた後にイオン発生装置60を駆動してイオンを検出することにより、保護部79等に付着したイオンを除去した後に、イオン検出を行なうことができる。この際、湿度情報を読み込み、予め明らかとなっている湿度と出力との相関関係に基づいて、イオン発生装置60の駆動停止時間または上記閾値を設定することにより、湿度の影響を考慮してイオンの有無を検知することができる。これにより、精度よくイオンの有無を検知することができる。
(実施の形態4)
従来から、イオン発生装置と、イオンを検出するイオン検出装置を備えた送風装置が開発されている。このような送風装置が開示された文献として、たとえばと特開2007−114177号公報(特許文献5)が挙げられる。
特許文献5に開示の送風装置にあっては、イオン検出装置をイオン発生装置よりも送風下流側に配置し、放電電極と捕集電極(集電電極)を、空気流に対してほぼ平行に、かつ、同一平面上に設けている。
しかしながら、イオン発生装置の近傍に捕集電極(集電電極)を配置した場合には、イオン発生装置から発生されたイオンの多くが捕集電極に付着されるため、外部に放出されるイオンのイオン量が減少する。
また、放電電極と集電電極と同一平面上に配置することが困難な場合もあり、送風経路の形状如何によっては、イオン検出装置の設置位置を十分に考慮する必要があった。
本実施の形態に係る送風装置は、送風経路が曲がって形成される場合に、イオン発生装置から発生されたイオンが大量に付着することを抑制しつつ、イオンの測定を十分に行なうことを目的とする。
図28は、本実施の形態に係る送風装置の断面図である。図28を参照して、本実施の形態に係る送風装置1Dについて説明する。
図28に示すように、本実施の形態に係る送風装置1Dは、実施の形態3に係る送風装置1Cと比較した場合に、送風経路52Dの構成が相違する。
送風経路52Dは、第1方向に延在する第1送風経路52aと、当該第1方向と異なる第2方向に延在する第2送風経路52bと、第1送風経路52aと第2送風経路52bとを接続する曲がり部52cとを有する。
イオン発生装置60Dは、曲がり部52cの送風上流側に設置される。イオン検出部70は、曲がり部52cよりも送風下流側に距離を持って設置される。イオン検出部70は、第1方向に平行な第1送風経路52aの中心軸と送風経路52Dとが交差する側に位置する第2送風経路52bの内壁に設置される。
第1送風経路52aの軸線方向(中心軸に平行な方向)に沿って進行してきた気流の大部分は、進路を変更する際に、曲がり部52cの外側に当たる。曲がり部52cにイオン検出部70を設置した場合には、気流に含まれるイオンの多くが曲がり部52cに設置されたイオン検出部70に捕集されてしまう。
曲がり部52cから距離を持って送風下流側に離れた位置においては、気流の向きが安定しており、第2送風経路52bの軸線方向(中心軸に平行な方向)に沿って進行する。
ここで、本実施の形態においては、イオン検出部70が、曲がり部52cよりも送風下流側に距離を持って設置される。このため、曲がり部52cにイオン検出部70を設置する場合と比較して、大量のイオンが集電電極72に捕集されることを防止することができる。
また、イオン検出部70は、第1方向に平行な第1送風経路52aの中心軸と送風経路52Dとが交差する側に位置する第2送風経路52bの内壁に設置される。すなわち、イオン検出部70は、第2送風経路52b内の外側領域に設置される。
送風機51から送風される気流は、遠心力によって外側に向かいやすくなる。このため、第2送風経路52b内の外側領域である、第1方向に平行な第1送風経路52aの中心軸と送風経路52Dとが交差する側に位置する第2送風経路52bの内壁側では、気流も多く、イオン検出に必要なイオンを十分に確保することができる。
図29は、イオンを検出する際のフローの一例を示す図である。図29を参照して、イオンを検出する際のフローについて説明する。なお、本実施の形態においては、イオン検出部70がイオンの検出感度が低い部分に設置されており、かつ、人検知センサーを搭載している場合におけるイオン検出フローを一例として説明する。
図29に示すように、イオン量を検出するに際して、まず工程(S31)にて、制御部は、測定時間になったか否かを判断する。測定時間になったと判断した場合(工程(S31);YES)には、工程(S32)を実施する。一方、測定時間になっていないと判断した場合(工程(S31);NO)には、イオンを発生させつつ、これを送風しながら測定時間が到来するまで待機する。
工程(S32)においては、人検知センサを用いて送風方向に人がいるか否かを判断する。送風方向に人がいないと判断された場合(工程(S32);NO))には、工程(S33)を実施する。一方、送風方向に人がいると判断された場合(工程(S32);YES)には、イオンを発生させつつ、これを送風しながら人がいないと検知されるまで待機する。
工程(S33)においては、イオン検出部70に届くイオン量が増加するように風量を調整する。風量が調整された後に、イオン検出部70によるイオンの検出が開始される。次に、工程(S34)において、イオン量の検出が完了したか否かを判断する。イオン量の検出が完了したと判断された場合(工程(S34);YES)には、工程(S35)を実施する。一方、イオン量の検出が完了していないと判断された場合(工程(S34);NO)には、検出が完了するまで検出動作を続ける。工程(S35)においては、風量を元に戻す。なお、風量を調整することなしに、工程(S34)において、イオン量の検出を十分行なうことができる場合には、工程(S33)と工程(S35)は省略可能である。
工程(S35)が実施された後は、所定の時間が経過した後に、工程(S31)からの動作を繰り返し実施する。
本実施の形態のように、イオン検出部70をイオン発生装置60から離れて設置する場合においては、イオン検出部70をイオン発生装置60の近傍に設置する場合と比較して、集電電極で捕集されるイオンが減少するが、イオン検出時に風量を調整することにより、距離が遠くなることにより減少するイオンを補填することができる。
また、人がいないと検知された際に風量を増減することにより、使用者に風量の変化に気づかれることなく(使用者に違和感を与えることなく)、イオンを検出することができる。
なお、本実施の形態においては、送風装置1Dに人検知センサが搭載されている場合を例示して説明したが、これに限定されず、人検知センサが搭載されていなくてもよい。この場合には、イオン検出フローにおいては、工程(S32)を省略することができる。
(実施の形態5)
従来から、イオン発生装置よりも送風下流側にイオン検出装置を配置した送風装置が各種開発されている。このような送風装置が開示された文献として、たとえば特開2010−287321号公報(特許文献6)、特開2013−037833号公報(特許文献7)が挙げられる。
特許文献6,7に開示の送風装置においては、イオン発生装置によって発生されたイオンが外部に送出される前に、一部のイオンを捕集してイオンを検出する。このため、外部に送出されるイオンの量は、減少していた。
本実施の形態に係る送風装置は、外部に送出されるイオンが減少することを防止しつつ、イオンを検出することを目的とするものである。
図30は、本実施の形態に係る送風装置の断面図である。図30を参照して、本実施の形態に係る送風装置1Eについて説明する。
図30に示すように、本実施の形態に係る送風装置1Eは、実施の形態3に係る送風装置1Cと比較した場合に、イオン検出部70Eの構成および設置位置が相違する。その他の構成は、ほぼ同様である。イオン検出部70Eは、吸込口からイオン発生装置60までの間に位置する送風経路内に設けられている。
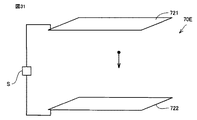
図31および図32は、イオン検出部の構成、制御部および湿度測定部を示すブロック図である。図31および図32を参照して、本実施の形態に係るイオン検出部70Eの構成について説明する。
図31および図32に示すように、本実施の形態に係るイオン検出部70Eは、実施の形態3に係るイオン検出部70と比較した場合に、イオンを捕集する集電部が反発電極721と集電電極722によって構成されている点において相違する。その他の構成については、ほぼ同様である。
反発電極721は、空気中のマイナスイオンを反発させる電極である。集電電極722は、反発されたイオンを収集する電極である。反発電極721および集電電極722は、板状形状を有する。反発電極721および集電電極722は、たとえば、一定の間隔をあけて対向して配置されている。反発電極721および集電電極722は、送風機51によって送風経路を通過する空気に接触しやすいように配設されている。
なお、反発電極721と集電電極722との形状については、特に限定せず、集電電極722を平板状、筒状、又は線状に設計し、反発電極721を集電電極722を取り囲む筒状に設計してもよい。
反発電極721は、測定すべきイオンの種類に応じて、給電部S(図31参照)によって正電位または負電位が印加される。反発電極721に負電位が印加される場合には、反発電極721と集電電極722との間に存在しているマイナスイオンが、反発電極721で跳ね返されて集電電極722に衝突して収集される。
図33は、本実施の形態に係る制御部の要部構成を示すブロック図である。図33を参照して、制御部5の詳細について説明する。
図33に示すように、制御部5は、CPU150と、タイマ151と、電圧監視部152と、スイッチ通断部153と、周期調整部154と、容量調整部155とを有する。
CPU150は、バスNを介して制御部5全体の動作の制御を行うものである。タイマ151は、計測部73の計測時間を計時するものである。電圧監視部152は、A/D変換部74からのデジタルの電圧を監視するものであり、該デジタルの電圧を所定の電圧と比較し、該デジタルの電圧が所定の電圧以上になった場合、その旨をCPU150に通知するようにしてある。ここで、所定の電圧は、必要に応じて設定するものであり、本実施の形態では、所定の電圧が積分回路73aの飽和電圧とされる場合について説明する。なお、積分回路73aは実施の形態3に係る積分回路73a(図24参照)とほぼ同等の構成を有する。スイッチ通断部153は、CPU150の指示に応じて、計測部73におけるスイッチ733(図24参照)をオン/オフとするものである。
図34は、本実施の形態に係る制御部のスイッチ制御動作手順を示すフローチャートである。図34を参照して、本実施の形態に係る制御部のスイッチ制御動作手順について説明する。ここでは、計測周期が1秒、積分回路の飽和電圧が5Vである場合を例として説明する。
なお、イオン検出部70Eは、イオンが無い場合または、+イオンと−イオンが同じ量の場合は、出力電圧が2.5Vとなり、+イオンが多くなると出力電圧が、5V側に振れ、−イオンが多くなると0V側に振れるように構成されている。
図34に示すように、まず、工程(S41)にて、積分回路73aにおけるスイッチ733(図24参照)がオフとされ、積分回路が計測開始の状態になると、CPU150はタイマ151に計時を開始させる。次に、工程(S42)にて、CPU150は、A/D変換部74からの電圧が5V以上となったか否かを電圧監視部152での監視結果に基づいて判定する。
続いて、工程(S42)にて、A/D変換部74からの電圧が5V以上となったと判定した場合(工程(S42):YES)には、工程(S43)を実施する。一方、工程(S42)にて、A/D変換部74からの電圧が5V以上となっていないと判定した場合(工程(S42);NO)には、工程(S44)を実施する。
工程(S43)においては、CPU150はスイッチ通断部153にスイッチオンを指示する。スイッチ通断部153はCPU150の指示に応じて、計測部73のスイッチ733をオンとして、計測動作を中止させる。
次に、工程(S44)にて、CPU150はタイマ151にて計時される時間が1秒に達したか否かを判定する。CPU150は、計時される時間が1秒に達したと判定した場合(工程(S44):YES)には、工程(S45)を実施する。一方、計時される時間が1秒に達していないと判定した場合(工程(S44):NO)には、工程(S46)を実施する。
工程(S45)においては、スイッチ通断部153に積分回路のリセットを指示する。スイッチ通断部153はCPU150の指示に応じて、スイッチ733のオン/オフを制御して、積分回路73aを計測開始の状態にリセットし、計測を再開する。
ここで、スイッチ733のオン/オフの制御は、積分回路73aを計測開始の状態にリセットする制御であれば、特に限定しない。例えば、スイッチ通断部153は、スイッチ733がオンとされている場合、スイッチ733をオフとさせ、スイッチ733がオフとされている場合、スイッチ733をオンとさせてからオフとさせることにより、積分回路73aを計測開始の状態にリセットし、電位計測を再開する。
続いて、工程(S46)にて、CPU150は、停止指示を受け付けたか否かを判定する。停止指示を受け付けていないと判定した場合(工程(S46):NO)、工程(S42)からの処理を繰り返し行う。一方、工程(S46)にて、停止指示を受け付けたと判定した場合(工程(S46):YES)には、CPU150は処理を終了する。
周期調整部154は、計測部73により計測された電圧に基づいて、計測周期を調整するようにしてある。図35は、計測周期を調整する前後の電圧の波形を示す図である。図35において、左側は調整前の、計測周期が1秒とされる場合の電圧の波形を示しており、右側は調整後の、計測周期が1.7秒と調整される場合の電圧の波形を示している。
図35に示すように、調整前と調整後を比較すると、調整後においては、計測周期が増加することにより、集電電極722に付着するイオンの量が増加する。これにより、出力電圧が増加する。このため、計測周期、すなわちコンデンサの放電間隔を長くすることにより、微量なイオンでも検出することが可能となる。
容量調整部155は、計測部13により計測された電圧に基づいて、コンデンサ732の容量を調整するようにしてある。図36はコンデンサ732の容量を調整する前後の電圧の波形を示す図である。図36において、左側は調整前の、コンデンサ732の容量が33pFとされる場合の電圧の波形を示しており、右側は調整後の、コンデンサ732の容量を10pFと調整される場合の電圧の波形を示している。
図36に示すように、コンデンサ732の容量が下がると、計測部73の感度が高まる。このため、コンデンサ732の容量を小さくすることにより、微量なイオンでも検出することが可能となる。
本実施の形態においては、イオン検出部70Eは、イオン発生装置60よりも送風上流側に配置されている。このため、イオン検出部70Eによって捕集されるイオンは、送風装置1E内から外部に送出され、これが送風経路内に戻ってきたものである。
したがって、イオン発生装置60から発生したイオンは、減少することなく送風装置1Eから放出される。この結果、本実施の形態においては、外部に送出されるイオンが減少することを防止しつつ、イオンを検出することができる。
また、イオン検出部70Eで検出されるイオンは、部屋に放出されているイオンそのものなので、部屋が大小に関わらず、実際の部屋のイオン量(イオン濃度)を検出することが可能となる。
上述のように、複数の実施の形態が存在する場合は、特に記載がある場合を除き、各々の実施の形態の特徴部分を適宜組み合わせることは、当初から予定されている。
以上、本発明の実施の形態について説明したが、今回開示された実施の形態はすべての点で例示であって制限的なものではない。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。