JP2017009095A - クラッチ装置及びクラッチ装置の制御方法 - Google Patents
クラッチ装置及びクラッチ装置の制御方法 Download PDFInfo
- Publication number
- JP2017009095A JP2017009095A JP2015127961A JP2015127961A JP2017009095A JP 2017009095 A JP2017009095 A JP 2017009095A JP 2015127961 A JP2015127961 A JP 2015127961A JP 2015127961 A JP2015127961 A JP 2015127961A JP 2017009095 A JP2017009095 A JP 2017009095A
- Authority
- JP
- Japan
- Prior art keywords
- hydraulic
- electric motor
- pressure
- hydraulic pump
- gain
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 11
- 239000010720 hydraulic oil Substances 0.000 claims description 30
- 230000003247 decreasing effect Effects 0.000 claims description 9
- 238000013459 approach Methods 0.000 claims description 3
- 230000005540 biological transmission Effects 0.000 abstract description 53
- 239000012530 fluid Substances 0.000 abstract description 2
- 230000007246 mechanism Effects 0.000 description 26
- 230000002093 peripheral effect Effects 0.000 description 18
- 230000007423 decrease Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 6
- 230000033001 locomotion Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 3
- 239000010687 lubricating oil Substances 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000010705 motor oil Substances 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 238000003756 stirring Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images





Landscapes
- Arrangement And Driving Of Transmission Devices (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
Abstract
【解決手段】第1及び第2の摩擦クラッチ12A,12Bを押圧するピストン122に油圧を作用させるシリンダ室130dに作動油を供給する油圧回路5は、油圧ポンプ51及び油圧ポンプ51を駆動する電動モータ52を有し、電動モータ52が制御部10に制御され、制御部10は、油圧ポンプ51の吐出圧の目標値と実値との偏差に基づいて電動モータ52をフィードバック制御するフィードバック制御手段101と、フィードバック制御101により電動モータ52の回転数を上昇させる際のゲインが電動モータ52の回転数を下降させる際のゲインよりも大きくなるようにゲイン調整を行うゲイン調整手段102とを有する。
【選択図】図6
Description
図1は、本発明の実施の形態に係るクラッチ装置としての駆動力伝達装置を備えた四輪駆動車の概略の構成を示す構成図である。
四輪駆動車200は、走行用の駆動力を発生させる駆動源としてのエンジン202と、トランスミッション203と、左右一対の主駆動輪としての前輪204L,204Rと、左右一対の補助駆動輪としての後輪205L,205Rと、エンジン202の駆動力を前輪204L,204R及び後輪205L,205Rに伝達可能な駆動力伝達系201と、駆動力伝達系201を制御する制御部10とを備えている。なお、本実施の形態において、各符号における「L」及び「R」は、車両の前進方向に対する左側及び右側の意味で使用している。
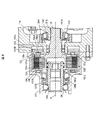
図2は、駆動力断続装置3の構成例を示し、(a)は駆動力断続装置3の断面図、(b)は、駆動力断続装置3の噛み合い部を模式的に示す説明図である。なお、図2(a)では、駆動力断続装置3におけるフロントデフケース40の回転軸線Oよりも上側の半分の範囲を図示している。
駆動力伝達装置1は、図1に示すように、プロペラシャフト2から駆動力が伝達される後輪側の歯車機構11と、この歯車機構11によって伝達された駆動力を調整してアクスルシャフト207L,207Rに伝達する第1及び第2の摩擦クラッチ12A,12Bと、第1及び第2の摩擦クラッチ12A,12B及び歯車機構11を収容するハウジング13と、第1及び第2の摩擦クラッチ12A,12Bへ油圧を供給する油圧回路5と、油圧回路5を制御する制御部10とを有する。
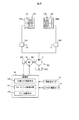
図5は、油圧回路5の構成例を、油圧回路5を制御する制御部10と共に模式的に示す構成図である。油圧回路5は、油圧ポンプ51と、油圧ポンプ51を駆動する電動モータ52とを、油圧源50として有している。電動モータ52と油圧ポンプ51とは、シャフト521によって連結されている。シャフト521は、電動モータ52の回転子と一体に回転する。なお、シャフト521と電動モータ52の回転子との間に、回転子の回転を所定の減速比で減速する減速機を設けてもよい。
以上、本発明のクラッチ装置及びクラッチ装置の制御方法を実施の形態に基づいて説明したが、本発明はこの実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で適宜変形して実施することが可能である。
Claims (5)
- 押圧力を受けて摩擦部材間に摩擦力を発生させる摩擦クラッチと、
油圧を受けて前記摩擦クラッチを押圧するピストンと、
前記ピストンに前記油圧を作用させる油圧室が形成されたハウジングと、
前記油圧室に作動油を供給する油圧回路と、
前記油圧回路を制御する制御部とを備え、
前記油圧回路は、油圧ポンプ、前記油圧ポンプを駆動する電動モータ、及び前記油圧ポンプから前記油圧室に供給される前記作動油の油圧を調節する圧力制御弁を有し、前記電動モータが前記制御部に制御され、
前記制御部は、前記油圧ポンプの吐出圧の目標値と実値との偏差に基づいて前記電動モータをフィードバック制御するフィードバック制御手段と、前記フィードバック制御により前記電動モータの回転数を上昇させる際のゲインが前記電動モータの回転数を下降させる際のゲインよりも大きくなるようにゲイン調整を行うゲイン調整手段とを有する、
クラッチ装置。 - 前記制御部は、前記油圧ポンプの吐出圧と前記電動モータの回転数との関係を示すマップ情報を記憶し、前記電動モータの回転数が前記マップ情報を参照して設定された前記電動モータの回転数の目標値に近づくように、前記電動モータを制御する、
請求項1に記載のクラッチ装置。 - 前記制御部は、前記油圧ポンプの吐出圧が前記油圧室に供給すべき作動油の油圧よりも高くなるように前記電動モータを制御する、
請求項1又は2に記載のクラッチ装置。 - 前記制御部は、前記油圧ポンプの吐出圧が減圧された作動油が前記油圧室に供給されるように前記圧力制御弁を制御する、
請求項3に記載のクラッチ装置。 - 押圧力を受けて摩擦部材間に摩擦力を発生させる摩擦クラッチと、
油圧を受けて前記摩擦クラッチを押圧するピストンと、
前記ピストンに前記油圧を作用させる油圧室が形成されたハウジングと、
前記油圧室に作動油を供給する油圧回路とを備えたクラッチ装置の制御方法であって、
前記油圧回路は、油圧ポンプ、前記油圧ポンプを駆動する電動モータ、及び前記油圧ポンプから前記油圧室に供給される前記作動油の油圧を調節する圧力制御弁を有し、
前記油圧ポンプの吐出圧の目標値と実値との偏差に基づいて前記電動モータをフィードバック制御すると共に、前記フィードバック制御により前記電動モータの回転数を上昇させる際のゲインが前記電動モータの回転数を下降させる際のゲインよりも大きくなるようにゲイン調整を行う、
クラッチ装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015127961A JP2017009095A (ja) | 2015-06-25 | 2015-06-25 | クラッチ装置及びクラッチ装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015127961A JP2017009095A (ja) | 2015-06-25 | 2015-06-25 | クラッチ装置及びクラッチ装置の制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017009095A true JP2017009095A (ja) | 2017-01-12 |
Family
ID=57761369
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015127961A Pending JP2017009095A (ja) | 2015-06-25 | 2015-06-25 | クラッチ装置及びクラッチ装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017009095A (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001206092A (ja) * | 2000-01-24 | 2001-07-31 | Fuji Univance Corp | 駆動力配分装置 |
| JP2004270765A (ja) * | 2003-03-06 | 2004-09-30 | Toyota Motor Corp | 油圧ポンプの吐出圧マップ書換方法 |
| JP2005308150A (ja) * | 2004-04-23 | 2005-11-04 | Toyota Motor Corp | 自動変速機の油圧制御装置 |
| JP2008121796A (ja) * | 2006-11-13 | 2008-05-29 | Jtekt Corp | 油圧作動式クラッチ装置および同クラッチ装置をクラッチ機構とする駆動力伝達装置 |
| JP2009030678A (ja) * | 2007-07-25 | 2009-02-12 | Nissan Motor Co Ltd | 油圧クラッチの制御装置 |
| JP2009079757A (ja) * | 2007-08-02 | 2009-04-16 | Honda Motor Co Ltd | 油圧式車両クラッチ機構及び方法 |
| JP2010096198A (ja) * | 2008-10-14 | 2010-04-30 | Univance Corp | 駆動力伝達装置および駆動力伝達装置を搭載した四輪駆動車 |
| JP2011149459A (ja) * | 2010-01-20 | 2011-08-04 | Honda Motor Co Ltd | 動力伝達装置 |
-
2015
- 2015-06-25 JP JP2015127961A patent/JP2017009095A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001206092A (ja) * | 2000-01-24 | 2001-07-31 | Fuji Univance Corp | 駆動力配分装置 |
| JP2004270765A (ja) * | 2003-03-06 | 2004-09-30 | Toyota Motor Corp | 油圧ポンプの吐出圧マップ書換方法 |
| JP2005308150A (ja) * | 2004-04-23 | 2005-11-04 | Toyota Motor Corp | 自動変速機の油圧制御装置 |
| JP2008121796A (ja) * | 2006-11-13 | 2008-05-29 | Jtekt Corp | 油圧作動式クラッチ装置および同クラッチ装置をクラッチ機構とする駆動力伝達装置 |
| JP2009030678A (ja) * | 2007-07-25 | 2009-02-12 | Nissan Motor Co Ltd | 油圧クラッチの制御装置 |
| JP2009079757A (ja) * | 2007-08-02 | 2009-04-16 | Honda Motor Co Ltd | 油圧式車両クラッチ機構及び方法 |
| JP2010096198A (ja) * | 2008-10-14 | 2010-04-30 | Univance Corp | 駆動力伝達装置および駆動力伝達装置を搭載した四輪駆動車 |
| JP2011149459A (ja) * | 2010-01-20 | 2011-08-04 | Honda Motor Co Ltd | 動力伝達装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106369073B (zh) | 离合器装置以及离合器装置的控制方法 | |
| US10293687B2 (en) | Four-wheel drive vehicle and control apparatus for four-wheel drive vehicle | |
| US10654360B2 (en) | Four-wheel drive vehicle and method for controlling the four-wheel drive vehicle | |
| JP6728803B2 (ja) | 駆動力伝達装置の制御装置及び制御方法 | |
| JP6311513B2 (ja) | 四輪駆動車及び四輪駆動車の制御方法 | |
| US10493845B2 (en) | Drive force control device and method of controlling vehicle | |
| US11207979B2 (en) | Drive device for vehicle | |
| JP6597298B2 (ja) | 四輪駆動車 | |
| JP6099965B2 (ja) | インホイールモータ駆動装置 | |
| US11285933B2 (en) | Vehicle drive device | |
| JP6627357B2 (ja) | クラッチ装置及びクラッチ装置の制御方法 | |
| US10480597B2 (en) | Clutch apparatus and method for controlling the clutch apparatus | |
| US11313421B2 (en) | Vehicle drive device | |
| JP2017009095A (ja) | クラッチ装置及びクラッチ装置の制御方法 | |
| JP6069973B2 (ja) | 車両用駆動装置 | |
| US8870713B2 (en) | Vehicle drive apparatus | |
| JP4294465B2 (ja) | 動力伝達装置の制御装置 | |
| JP7371434B2 (ja) | 駆動力伝達装置 | |
| JP5663370B2 (ja) | 車両用無段変速機 | |
| JP2017096338A (ja) | 動力伝達装置およびその軸受の予圧調整方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180517 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190402 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20190531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191224 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200623 |