JP2016215864A - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP2016215864A JP2016215864A JP2015103726A JP2015103726A JP2016215864A JP 2016215864 A JP2016215864 A JP 2016215864A JP 2015103726 A JP2015103726 A JP 2015103726A JP 2015103726 A JP2015103726 A JP 2015103726A JP 2016215864 A JP2016215864 A JP 2016215864A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- driver
- amount
- pedal
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【課題】運転者の操舵状況及び車両の加減速度の変化状況に応じて操舵アシストトルクを好ましく制御する電動パワーステアリング装置を提供する。
【解決手段】操舵アシストトルクTaが目標操舵アシストトルクTatになるように制御装置によって操舵アシストトルク付与装置を制御する電動パワーステアリング装置。目標操舵アシストトルクTatは、運転者の操舵負担を軽減するための目標基本操舵アシストトルクTabと、操舵フィーリングを向上させるための目標減衰トルクTdt及び目標摩擦トルクTftの少なくとも一方である補助制御量と、を含む。制御装置は、運転者の操舵操作が能動操作、受動操作、及び保舵の何れであるかの判定結果及び運転者の加減速操作が操作量増大操作、操作量低減操作、及び操作量保持の何れであるかの判定結果に基づいて、補助制御量を修正する。
【選択図】図2
【解決手段】操舵アシストトルクTaが目標操舵アシストトルクTatになるように制御装置によって操舵アシストトルク付与装置を制御する電動パワーステアリング装置。目標操舵アシストトルクTatは、運転者の操舵負担を軽減するための目標基本操舵アシストトルクTabと、操舵フィーリングを向上させるための目標減衰トルクTdt及び目標摩擦トルクTftの少なくとも一方である補助制御量と、を含む。制御装置は、運転者の操舵操作が能動操作、受動操作、及び保舵の何れであるかの判定結果及び運転者の加減速操作が操作量増大操作、操作量低減操作、及び操作量保持の何れであるかの判定結果に基づいて、補助制御量を修正する。
【選択図】図2
Description
本発明は、自動車などの電動パワーステアリング装置に係る。
電動パワーステアリング装置は、電動式のパワーステアリングユニットによって操舵装置に操舵アシストトルクを付与することにより、運転者の操舵負担、即ち運転者がステアリングホイールを回転操作する際の負担を軽減すると共に、操舵フィーリングを向上させる。電動パワーステアリング装置の制御装置は、上記機能を達成するための目標操舵アシストトルクを演算し、実際の操舵アシストトルクが目標操舵アシストトルクになるようにパワーステアリングユニットを制御する。
目標操舵アシストトルクは運転者の操舵状況を示す操舵トルクなどに基づいて演算されるが、必要な操舵アシストトルクは車両の走行状況によっても変化する。例えば、下記の特許文献1には、車両の減速時には前輪の接地荷重が増大し、操舵に必要な力が増大するので、ブレーキスイッチがオフからオンになったときには、目標操舵アシストトルクを大きくするよう構成された電動パワーステアリング装置が記載されている。
〔発明が解決しようとする課題〕
一般に、目標操舵アシストトルクは、運転者の操舵負担を軽減するための目標基本操舵アシストトルクと、操舵フィーリングを向上させるための補助制御量との和である。補助制御量には、操舵速度に比例する操舵抗力を発生し操舵系の安定性を向上させるための目標減衰トルク及び操舵のヒステリシスを制御するための目標摩擦トルクが含まれている。目標基本操舵アシストトルクが増大されると、操舵輪を転舵させ易くなるので、操舵操作の容易性が向上する。これに対し、目標減衰トルクが増大されると、操舵速度が高いほど大きくなる操舵抵抗が増大し、目標摩擦トルクが増大されると、操舵のヒステリシスが増大する。よって、補助制御量が増大されると、操舵輪を転舵させ難くなるので、車両の走行安定性は向上するが、操舵操作の容易性が低下する。従って、車両の制動時に単純に目標操舵アシストトルクを大きくすると、目標基本操舵アシストトルクのみならず補助制御量も増大するため、操舵に必要な力を効果的に低減することはできない。
一般に、目標操舵アシストトルクは、運転者の操舵負担を軽減するための目標基本操舵アシストトルクと、操舵フィーリングを向上させるための補助制御量との和である。補助制御量には、操舵速度に比例する操舵抗力を発生し操舵系の安定性を向上させるための目標減衰トルク及び操舵のヒステリシスを制御するための目標摩擦トルクが含まれている。目標基本操舵アシストトルクが増大されると、操舵輪を転舵させ易くなるので、操舵操作の容易性が向上する。これに対し、目標減衰トルクが増大されると、操舵速度が高いほど大きくなる操舵抵抗が増大し、目標摩擦トルクが増大されると、操舵のヒステリシスが増大する。よって、補助制御量が増大されると、操舵輪を転舵させ難くなるので、車両の走行安定性は向上するが、操舵操作の容易性が低下する。従って、車両の制動時に単純に目標操舵アシストトルクを大きくすると、目標基本操舵アシストトルクのみならず補助制御量も増大するため、操舵に必要な力を効果的に低減することはできない。
また、操舵操作の容易性の向上及び車両の走行安定性の向上の何れが優先されるべきであるかは、制動による車両の減速度の変化状況によって異なる。即ち、運転者の制動操作量が増大され車両の減速度の大きさが増大する過程においては、運転者が積極的に車両の進行方向を変化させようとしていなければ、操舵操作の容易性よりも車両の走行安定性の向上が優先されることが好ましい。これに対し、運転者の制動操作量が低減され車両の減速度の大きさが低下する過程においては、運転者が車両の進行方向を変え易いことが好ましいので、車両の走行安定性よりも操舵操作の容易性の向上が優先されることが好ましい。なお、操舵操作の容易性の向上及び車両の走行安定性の向上の何れが優先されるべきであるかは、車両の加速度の変化状況によっても異なり、運転者の操舵状況によっても異なる。
しかるに、上記公開公報に記載された電動パワーステアリング装置のような従来の電動パワーステアリング装置においては、車両の加減速度の変化状況及び運転者の操舵状況に応じて目標基本操舵アシストトルク及び補助制御量が増減されるようになってはいない。そのため、従来の電動パワーステアリング装置によっては、車両の加減速度の変化状況及び運転者の操舵状況に応じて操舵アシストトルクを好ましく制御することができない。
本発明の主要な課題は、実際の操舵アシストトルクが目標操舵アシストトルクになるように制御する電動パワーステアリング装置において、運転者の操舵状況及び車両の加減速度の変化状況に応じて操舵アシストトルクを好ましく制御することである。
〔課題を解決するための手段及び発明の効果〕
〔課題を解決するための手段及び発明の効果〕
本発明によれば、車両の操舵装置に操舵アシストトルクを付与するアシストトルク付与装置と、目標操舵アシストトルクを演算し、前記操舵装置に付与される実際の操舵アシストトルクが前記目標操舵アシストトルクになるように前記アシストトルク付与装置を制御する制御装置と、を有し、前記目標操舵アシストトルクは、少なくとも操舵トルクに基づいて演算される目標基本操舵アシストトルクと、少なくとも操舵角速度に基づいて演算される目標減衰トルク及び少なくとも操舵角に基づいて演算される目標摩擦トルクの少なくとも一方である補助制御量と、を含む車両の電動パワーステアリング装置が提供される。
前記制御装置は、運転者の操舵操作が運転者から前記操舵装置に操舵のエネルギが与えられる「能動操作」、前記操舵装置から運転者に操舵のエネルギが与えられる「受動操作」及び前記操舵装置と運転者との間にて操舵のエネルギの授受が行われない「保持」の何れであるかを判定する第一の判定装置と、前記車両を加減速させるための運転者の加減速操作が操作量増大操作、操作量低減操作及び操作量保持の何れであるかを判定する第二の判定装置とを有し、前記第一及び第二の判定装置の判定結果に基づいて、前記補助制御量を修正する。
上記の構成によれば、第一の判定装置により運転者の操舵操作が能動操作、受動操作、及び保持の何れであるかが判定され、第二の判定装置により運転者の加減速操作が操作量増大操作、操作量低減操作、及び操作量保持の何れであるかが判定される。更に、第一及び第二の判定装置の判定結果に基づいて、目標減衰トルク及び目標摩擦トルクの少なくとも一方である補助制御量が修正される。よって、運転者の操舵操作が能動操作、受動操作、及び保持の何れであるか及び運転者の加減速操作が操作量増大操作、操作量低減操作、及び操作量保持の何れであるかに応じて、目標減衰トルク及び目標摩擦トルクの少なくとも一方を好ましく制御することができる。従って、運転者の操舵状況及び車両の加減速度の変化状況に応じて操舵アシストトルクを好ましく制御することができる。
なお、「能動操作」は、運転者から操舵装置に操舵のエネルギが与えられる操作、即ち運転者が積極的に過渡的な操舵を行って操舵装置が保有する操舵のエネルギを増大させる操作である。「受動操作」は、操舵装置から運転者に操舵のエネルギが与えられる操作、即ち操舵装置が保有する操舵のエネルギが運転者へ伝達され、運転者が消極的に過渡的な操舵を行う操作である。具体的には、受動操作は、路面からの逆入力により操舵輪が転舵され、ステアリングホイールのような操舵入力装置の変位が変化する場合に、その操舵入力装置の変位の変化を妨げないように運転者が同変位の変化に沿う操舵を行う操作である。「保持」は、操舵装置と運転者との間にて操舵のエネルギの授受が行われないこと、即ち運転者が過渡的な操舵を行わず、操舵装置が保有する位置エネルギを変化させないことである。具体的には、保持は、操舵入力装置をある操舵操作位置に保持すること(保舵)又は操舵入力装置を中立位置に維持すること(中立位置維持)である。「操作量保持」は運転者が車両の加減速度を変化させないこと、即ちブレーキペダルのような加減速入力装置をある一定の操作位置に保持すること又は非操作位置に維持することである。
本発明の一つの態様においては、運転者の操舵操作はステアリングホイールを回転させることにより行われ、前記第一の判定装置は、操舵角速度と操舵トルクとの積及び操舵角と操舵トルクの微分値との積の和に基づいて、運転者の操舵操作が前記能動操作、前記受動操作、及び前記保持の何れであるかを判定する。
操舵角速度と操舵トルクとの積に基づく操舵仕事率(以下、「第一の操舵仕事率」と指称する)は、運転者が過渡的な操舵操作を行う状況において運転者が車両の進行方向を変更しようとする意思の強さを反映する。一方、操舵角と操舵トルクの微分値との積に基づく操舵仕事率(以下、「第二の操舵仕事率」と指称する)は、路面からの逆入力により回転されるステアリングホイールの回転を許容する運転者の意思の強さを反映する。以上については、必要ならば本願出願人の出願にかかる国際公開WO2014−087546を参照されたい。
後に詳細に説明するように、操舵角及び操舵トルクは、中立位置に対し一方の方向及び他方の方向への操舵されるときにそれぞれ正及び負になるとする。第一の操舵仕事率は、運転者が車両の進行方向を変更しようとする意思の強さが強いほど正の値で、大きさが大きくなる。他方、第二の操舵仕事率は、路面からの逆入力により回転されるステアリングホイールの回転を許容する運転者の意思の強さが強いほど負の値で、大きさが大きくなる。更に、ステアリングホイールをある操舵操作位置に保持すること又は中立位置に維持する場合には、第一及び第二の操舵仕事率は何れも0になる。よって、第一及び第二の操舵仕事率の和の符号(0を含む)の判定によって、操舵操作が三つの何れの操作であるかを判定することができる。なお、操舵角速度及び操舵トルクの微分値の符号の組合せによって、操舵操作が切り込みか切り戻しかを判定することができる。
上記の構成によれば、操舵角速度と操舵トルクとの積及び操舵角と操舵トルクの微分値との積の和に基づいて、運転者の操舵操作を判定するので、運転者の操舵操作が能動操作、受動操作、及び保持の何れであるかを判定することができる。
本発明の他の一つの態様においては、運転者の加減速操作はペダルを操作することにより行われ、前記ペダルを操作することにより行われる加減速操作の量は、前記ペダルの移動量及び前記ペダルに与えられる操作力のそれぞれの増大に応じて増大し、前記第二の判定装置は、前記ペダルの移動量の変化速度、前記ペダルに与えられる操作力の微分値、及び「前記ペダルの移動量の変化速度と前記ペダルに与えられる操作力との積及び前記ペダルの移動量と前記ペダルに与えられる操作力の微分値との積の和」の少なくとも一つに基づいて、運転者の加減速操作が前記操作量増大操作、前記操作量低減操作及び前記操作量保持の何れであるかを判定する。
ペダルを操作することにより行われる加減速操作の量は、ペダルの移動量及びペダルに与えられる操作力の増大に応じて増大する。よって、ペダルの移動量の変化速度及びペダルに与えられる操作力の微分値は、何れも加減速操作の量の増減変化率を表す。ペダルの移動量の変化速度とペダルに与えられる操作力との積は、上記第一の操舵仕事率に対応する加減速操作についての仕事率である。ペダルの移動量とペダルに与えられる操作力の微分値との積は、上記第二の操舵仕事率に対応する加減速操作についての仕事率である。よって、ペダルの移動量の変化速度とペダルに与えられる操作力との積及びペダルの移動量とペダルに与えられる操作力の微分値との積の和は、操舵操作の場合と同様に、ペダルを含む加減速操作系が保有するエネルギの変化を表す。
ペダルはばねなどによって非操作位置へ戻るよう付勢されている。そのため、一般的には、加減速操作系が保有するエネルギが減少するように操作量増大方向へペダルが操作されることもなければ、加減速操作系が保有するエネルギが増大するように操作量低減方向へペダルが操作されることもない。よって、ペダルの移動量及びペダルに与えられる操作力はそれらが増大するときに正の値になるとすると、上記積の和が正の値、負の値及び0であることは、それぞれ能動的に加減速操作量が増大されること、受動的に加減速操作量が低減されること及び加減速操作量が不変であることを表す。従って、上記積の和が正であるか、負であるか、0であるかを判定することにより、運転者の加減速操作が操作量増大操作、操作量低減操作、及び操作量保持の何れであるかを判定することができる。
また、ペダルの移動量及びペダルに与えられる操作力はそれらが増大するときに正の値になるとすると、ペダルの移動量の変化速度及びペダルに与えられる操作力の微分値は、加減速操作量が増大するときには正の値になり、加減速操作量が減少するときには負の値になり、加減速操作量が変化しないときには0になる。よって、ペダルの移動量の変化速度及びペダルに与えられる操作力の微分値の少なくとも一方が正であるか、負であるか、0であるかを判定することによっても、運転者の加減速操作が上記三つの操作の何れであるかを判定することができる。
上記の構成によれば、第二の判定装置は、ペダルの移動量の変化速度、ペダルに与えられる操作力の微分値、及び「ペダルの移動量の変化速度とペダルに与えられる操作力との積及びペダルの移動量とペダルに与えられる操作力の微分値との積の和」の少なくとも一つに基づいて、運転者の加減速操作を判定する。よって、運転者の加減速操作が操作量増大操作、操作量低減操作、及び操作量保持の何れであるかを判定することができる。
特に、上記第一の操舵仕事率に対応する加減速操作についての仕事率及び上記第二の操舵仕事率に対応する加減速操作についての仕事率の和は、ペダルの移動量の変化速度及びペダルに与えられる操作力の微分値の両者を含んでいる。よって、ペダルの移動量の変化速度及びペダルに与えられる操作力の微分値の一方に基づいて運転者の加減速操作が判定される場合に比して、運転者の加減速操作が何れの操作であるかを正確に判定することができる。
更に、本発明の他の一つの態様においては、前記ペダルはブレーキペダルであり、前記制御装置は、運転者の加減速操作が制動操作である状況において、運転者の操舵操作が前記受動操作及び前記保持の一方であると判定されている場合には、運転者の制動操作が前記操作量増大操作及び前記操作量保持の一方であると判定されているときには、運転者の制動操作が前記操作量低減操作であると判定されているときに比して、前記補助制御量の大きさを大きくする。
運転者の加減速操作が制動操作である状況において、運転者の操舵操作が受動操作及び保持の一方であり、運転者の制動操作が操作量増大操作及び操作量保持の一方である状況は、運転者が車両の進行方向を積極的に変化させずに車両を減速させようとする状況である。この状況においては、補助制御量の大きさを増大させることにより、操舵輪の舵角の変化を抑制し、車両の走行安定性を向上させることが好ましい。
上記の構成によれば、運転者の操舵操作が受動操作及び保持の一方であると判定されている場合には、運転者の制動操作が操作量増大操作及び操作量保持の一方であると判定されているときには、運転者の制動操作が操作量低減操作であると判定されているときに比して、補助制御量の大きさが大きくされる。よって、運転者が車両の進行方向を積極的に変化させずに車両を減速させようとする状況において、操舵輪の舵角の変化を抑制し、車両の走行安定性を向上させることができる。なお、上記の状況においては、補助制御量の大きさが大きくされると共に、必要ならば目標基本操舵アシストトルクの大きさが小さくされてもよい。
更に、本発明の他の一つの態様においては、前記ペダルはブレーキペダルであり、前記制御装置は、運転者の加減速操作が制動操作である状況において、運転者の操舵操作が前記能動操作であると判定され且つ運転者の制動操作が前記操作量増大操作であると判定されている場合には、運転者の操舵操作が前記能動操作であると判定され且つ運転者の制動操作が前記操作量低減操作及び前記制動操作量保持の何れか一方であると判定されている場合に比して、前記補助制御量の大きさを小さくする。
運転者の加減速操作が制動操作である状況において、運転者の操舵操作が能動操作であり且つ運転者の制動操作が操作量増大操作である状況は、緊急回避時のように、運転者が車両の進行方向を積極的に変化させると共に車両を積極的に減速させようとする状況である。この状況においては、補助制御量の大きさを低減することにより、操舵輪の舵角を変化させ易くすることが好ましい。
上記の構成によれば、運転者の操舵操作が能動操作であり且つ運転者の制動操作が操作量増大操作であると判定されている場合には、運転者の操舵操作が能動操作であると判定され且つ運転者の制動操作が操作量低減操作及び制動操作量保持の何れか一方であると判定されている場合に比して、補助制御量の大きさが小さくされる。よって、運転者が積極的に車両の進行方向を変化させると共に車両を積極的に減速させようとする状況において、操舵輪の舵角の変化を促し、積極的に車両を減速させつつ積極的に車両の進行方向を変化させたいという運転者の要求を効果的に充足させることができる。なお、上記の状況においては、補助制御量の大きさが小さくされると共に、必要ならば目標基本操舵アシストトルクの大きさが大きくされてもよい。
更に、本発明の他の一つの態様においては、前記ペダルはアクセルペダルであり、前記制御装置は、運転者の加減速操作が加速操作である状況において、運転者の加速操作が前記操作量増大操作であると判定されている場合には、運転者の操舵操作が前記保持であると判定されているときには、運転者の操舵操作が前記能動操作であると判定されているときに比して、前記補助制御量の大きさを大きくする。
運転者の加減速操作が加速操作である状況において、運転者の加速操作が操作量増大操作であり且つ運転者の操舵操作が保持である状況は、運転者が車両の進行方向を積極的に変化させることなく車両を積極的に加速させようとする状況である。この状況においては、補助制御量の大きさを増大させることにより、操舵輪が路面から受ける力及び左右の操舵輪の駆動力差などによって操舵輪の舵角が変化することを抑制することが好ましい。
上記の構成によれば、運転者の加速操作が操作量増大操作であると判定されている場合には、運転者の操舵操作が保持であると判定されているときには、運転者の操舵操作が能動操作であると判定されているときに比して、補助制御量の大きさが大きくされる。よって、運転者が車両の進行方向を積極的には変化させずに車両を積極的に加速させようとする状況において、操舵輪の舵角の変化を抑制し、車両の走行安定性を向上させることができる。即ち、路面からの逆入力及び左右の操舵輪の駆動力差などに起因してステアリングホイールのような操舵入力装置の操作位置が不必要に変化することを抑制することができる。
更に、本発明の他の一つの態様においては、前記補助制御量は前記目標摩擦トルクを含み、前記ペダルはアクセルペダルであり、前記制御装置は、運転者の加減速操作が加速操作である状況において、運転者の加速操作が前記操作量増大操作であると判定されている場合には、運転者の操舵操作が前記受動操作であると判定されているときには、運転者の操舵操作が前記受動操作ではないと判定されているときに比して、前記目標摩擦トルクの大きさを小さくする。
運転者の加減速操作が加速操作である状況において、運転者の加速操作が操作量増大操作であり且つ運転者の操舵操作が受動操作である状況は、運転者が操舵輪の直進位置への戻りを許容しつつ車両を積極的に加速させようとする状況である。この状況においては、摩擦トルクの大きさを低減することにより、操舵輪が直進位置へ戻り易くすることが好ましい。
上記の構成によれば、運転者の加速操作が操作量増大操作であると判定されている場合には、運転者の操舵操作が受動操作であると判定されているときには、運転者の操舵操作が能動操作であると判定されているときに比して、目標摩擦トルクの大きさが小さくされる。よって、運転者が操舵輪の直進位置への戻りを許容しつつ車両を積極的に加速させようとする状況において、操舵輪を直進位置へ効率的に戻しつつ車両を積極的に加速させたいという運転者の要求を効果的に充足させることができる。
以下に添付の図を参照しつつ、本発明の好ましい実施形態について詳細に説明する。
図1は、本発明の実施形態にかかる電動パワーステアリング装置10を示す概略構成図である。電動パワーステアリング装置10は、車両12に搭載されており、アシストトルク付与装置であるパワーステアリングユニット14と、パワーステアリング制御装置(「EPS制御装置」と略称する)16とを有している。後に詳細に説明するように、パワーステアリングユニット14は、後述の操舵装置にアシストトルクを付与するアシストトルク付与装置として機能する。パワーステアリング制御装置16は、少なくとも操舵トルクに基づいて目標操舵アシストトルクを演算し、実際の操舵アシストトルクが目標操舵アシストトルクになるようにパワーステアリングユニット14を制御する。
図示の実施形態においては、パワーステアリングユニット14は、コラムアシスト型の電動式パワーステアリングユニットとして構成されている。なお、本発明におけるパワーステアリングユニットは、操舵アシストトルクを制御し得る限り、例えばラック同軸式のラックアシスト型のパワーステアリングユニットのように、他の型式のパワーステアリングユニットであってもよい。
図1に於いて、パワーステアリングユニット14は操舵装置18に適用されている。操舵装置18は、運転者により操作されるステアリングホイール20と、ステアリングホイール20と共に回転するアッパステアリングシャフト22と、インタミディエットシャフト24と、操舵機構26とを含んでいる。インタミディエットシャフト24は、上端にてユニバーサルジョイント28を介してアッパステアリングシャフト22の下端に連結され、下端にてユニバーサルジョイント30を介して操舵機構26のピニオンシャフト32に連結されている。
操舵機構26は、ラック・アンド・ピニオン装置34と、タイロッド36L及び36Rとを含み、ラック・アンド・ピニオン装置34はピニオンシャフト32の回転をラックバー38の車両横方向の直線運動に変換し、またこの逆の変換を行う。タイロッド36L及び36Rの内端は、それぞれボールジョイント40L及び40Rを介してラックバー38の先端に枢着されている。タイロッド36L及び36Rの外端は、図には示されていないが、左右の前輪42L及び42Rのキャリアに設けられたナックルアームに枢着されている。
よって、ステアリングホイール20の回転変位及び回転トルクは、操舵機構26などにより、前輪42L及び42Rのキングピン軸(図示せず)の周りの枢動変位及び枢動トルクに変換されて前輪42L及び42Rへ伝達される。また、左右の前輪42L及び42Rが路面(図示せず)から受けるキングピン軸の周りの枢動変位及び枢動トルクは、操舵機構26などにより、ステアリングホイール20へそれぞれ回転変位及び回転トルクとして伝達される。
パワーステアリングユニット14は、電動機44及び変換装置46を含んでいる。図1には示されていないが、変換装置46は電動機44の回転軸に固定されたウオームギヤ及びアッパステアリングシャフト22に固定されたウオームホイールを含んでいる。電動機44の回転トルクは、変換装置46によってアッパステアリングシャフト22の回転トルクに変換され、操舵アシストトルクとしてアッパステアリングシャフト22へ伝達される。よって、パワーステアリングユニット14は、操舵装置18のアッパステアリングシャフト22に対し操舵アシストトルクを付与する。
アッパステアリングシャフト22には、操舵角センサ48及びトルクセンサ50が設けられている。操舵角センサ48はステアリングホイール20の回転角度を操舵角θとして検出し、トルクセンサ50はアッパステアリングシャフト22に与えられるトルクを操舵トルクTとして検出する。操舵角θ及び操舵トルクTを示す信号はEPS制御装置16に入力される。
なお、操舵角センサ48及びトルクセンサ50は、それぞれ車両が直進状態にあるときの値を0とし、左旋回方向へ操舵されるときの値を正として操舵角θ及び操舵トルクTを検出する。後述の目標基本操舵アシストトルクTa、目標操舵角θtなどの演算値も、左旋回方向の値が正である。
車両12には制動装置52が搭載されている。前輪42L、42R及び後輪43L、43Rの制動力は、制動装置52の油圧回路54によりホイールシリンダ56FL、56FR、56RL及び56RR内の圧力、即ち制動圧が制御されることによって制御される。制動装置52は、運転者によるブレーキペダル58の踏み込み操作に応じて駆動されるマスタシリンダ60を含んでおり、マスタシリンダ60内の圧力、即ちマスタシリンダ圧力Pmは圧力センサ62によって検出される。
ブレーキペダル58には、ブレーキペダル58に与えられる踏力Fbp及びブレーキペダル58の踏み込みストロークSbpを検出する踏力センサ64及びストロークセンサ66が設けられている。それぞれ踏力センサ64及びストロークセンサ66により検出された踏力Fbp及び踏み込みストロークSbpを示す信号は、EPS制御装置16に入力される。
踏力センサ64及びストロークセンサ66は、ブレーキペダル58が踏み込まれると、それぞれ踏力Fbpを示す信号及び踏み込みストロークSbpを示す信号を出力する。しかし、踏力Fbp及び踏み込みストロークSbpがそれぞれFbp0及びSbp0(何れも0に近い正の定数)以下であるときには、ブレーキペダル58の踏み込みは車輪の制動力の制御に関与しない。なお、ストロークセンサ66は、ブレーキペダル58の踏み込み操作角度を検出するようになっていてもよい。
一般に、車両には運転者の制動操作を検出するブレーキランプスイッチが設けられている。しかし、ブレーキランプスイッチは、踏力Fbp又はび踏み込みストロークSbpがそれぞれFbp0又はSbp0のような予め設定された値以上にならないと、オフからオンに変化しない。これに対し、踏力センサ64及びストロークセンサ66は、ブレーキペダル58が踏み込まれると、それぞれ踏力Fbp及び踏み込みストロークSbpを示す信号を出力するので、ブレーキランプスイッチよりも早期に運転者の制動操作を検出する。
図1には示されていないが、油圧回路54はオイルリザーバ、オイルポンプ及び種々の弁装置などを含んでいる。圧力センサ62により検出されたマスタシリンダ圧力Pmを示す信号は、ブレーキ制御装置68へ入力され、各ホイールシリンダの制動圧は通常時にはマスタシリンダ圧力Pmに応じてブレーキ制御装置68によって制御される。また各ホイールシリンダの制動圧は必要に応じてマスタシリンダ圧力Pmとは無関係にブレーキ制御装置68によって制御される。よって、制動装置52は運転者の制動操作とは無関係に各車輪の制動力を個別に制御可能である。
更に、車両12には、図には示されていないエンジンを制御するエンジン制動装置70及び運転者により踏み込み操作されるアクセルペダル72が搭載されている。運転者によるアクセルペダル72の踏み込みストロークSapは、アクセル開度センサ74によりアクセル開度Accとして検出され、アクセルペダル72に与えられる踏力Fapは、踏力センサ76により検出される。アクセル開度Accを示す信号及び踏力Fapを示す信号は、車速Vを示す信号と共にEPS制御装置16に入力される。
アクセル開度センサ74及び踏力センサ76は、アクセルペダル72が踏み込まれると、それぞれアクセル開度Accを示す信号及び踏力Fapを示す信号を出力する。しかし、アクセル開度Acc及び踏力FapがそれぞれAcc0及びFap0(何れも0に近い正の定数)以下であるときには、アクセルペダル72の踏み込みは車両の駆動力の制御に関与しない。なお、アクセル開度センサ74は、アクセルペダル72の踏み込み操作角度を検出するようになっていてもよい。
エンジン制動装置70は、通常時にはアクセル開度Accに応じてエンジンの出力を制御することにより、駆動輪である前輪42L及び42Rの駆動力を制御する。また、エンジン制動装置70は、必要に応じて、運転者によるアクセルペダル72の踏み込み操作とは無関係にエンジンの出力を制御可能である。なお、後輪43L及び43Rが駆動輪であってもよく、前輪及び後輪が駆動輪であってもよい。
制御装置16、68及び70は、それぞれCPUとROMとRAMと入出力ポート装置とを有し、これらが双方向性のコモンバスにより互いに接続されたマイクロコンピュータを含み、ROMは後述の制御プログラム、マップなどを記憶していてよい。制御装置16、68及び70は、必要に応じて相互に必要な信号の授受を行う。
EPS制御装置16は、図2乃至図5に示されたフローチャートに従って目標操舵アシストトルクTatを演算し、電動機44の回転トルクを制御することにより、実際の操舵アシストトルクTaが目標操舵アシストトルクTatになるように制御する。後に詳細に説明するように、目標操舵アシストトルクTatは、運転者の操舵負担を軽減するための目標基本操舵アシストトルクTab及び操舵フィーリングを向上させるための補助制御量の和である。補助制御量は、ステアリングホイール20の回転振動を減衰させるための目標減衰トルクTdt及び操舵のヒステリシスを制御するための目標摩擦トルクTftである。
特に、EPS制御装置16は、後に詳細に説明するように、運転者の運転操作状況に基づいて、操舵の能動・受動指標値INs、制動の操作量増減指標値INb及び駆動の操作量増減指標値INdを演算する。EPS制御装置16は、制動中であるときには、指標値INs及びINbに基づいて、それぞれ目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftに対する修正係数Kab、Kdt及びKftを演算する。EPS制御装置16は、駆動中であるときには、指標値INs及びINdに基づいて、それぞれ目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftに対する修正係数Kab、Kdt及びKftを演算する。更に、EPS制御装置16は、それぞれ修正係数Kab、Kdt及びKftが乗算されることにより修正された目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftの和として目標操舵アシストトルクTatを演算する。
次に、図2に示されたフローチャートを参照して、EPS制御装置16により実行される操舵アシストトルク制御のメインルーチンについて説明する。図2に示されたフローチャートによる制御は、図には示されていないイグニッションスイッチがオンであるときに、所定の時間毎に繰返し実行される。なお、下記の説明においては、図2乃至図5に示されたフローチャートによる操舵アシストトルク制御を単に「制御」と指称する。
まず、ステップ10においては、操舵角センサ74により検出された操舵角θを示す信号及びトルクセンサ76により検出された操舵トルクTを示す信号などが読み込まれる。
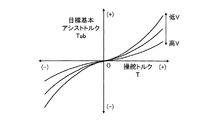
ステップ20においては、操舵トルクT及び車速Vに基づいて、図6に示されたマップから、目標基本操舵アシストトルクTabが演算される。図6に示されているように、目標基本操舵アシストトルクTabは、操舵トルクTの大きさが大きいほど、大きさが大きくなると共に、車速Vが高いほど、大きさが小さくなるよう、演算される。
ステップ30においては、例えば操舵角θの時間微分値として操舵角速度θdが演算され、操舵角速度θd及び車速Vに基づいて、図7に示されたマップから、補助制御量のうちの減衰制御量である目標減衰トルクTdtが演算される。目標減衰トルクTdtは、車速Vが高いほど、大きさが大きくなると共に、操舵角速度θdの大きさが基準値θd0(正の値)未満のときには、操舵角速度θdの大きさが大きいほど、大きさが大きくなり、操舵角速度θdの大きさが基準値θd0以上のときには、一定の値になるよう、演算される。なお、目標減衰トルクTdtは、操舵角速度θdが正のときには負の値になり、操舵角速度θdが負のときには正の値になる。
ステップ40においては、後に詳細に説明するように、図3及び図4に示されたフローチャートに従って、補助制御量のうちの摩擦制御量である目標摩擦トルクTftが演算される。
ステップ80においては、操舵トルクTの時間微分値Tdが演算されると共に、下記の式(1)に従って操舵の能動・受動指標値INsが演算される。なお、INsが正の値であるときには、操舵操作は能動的な操舵操作であり、INsが負の値であるときには、操舵操作は受動的な操舵操作である。INsが0であるときには、ステアリングホイール20が回転されていない状況、即ち、操舵操作は保舵(θ及びTは0以外で一定)又は中立位置保持(θ=T=0)である。
INs=θd・T+θ・Td ……(1)
INs=θd・T+θ・Td ……(1)
ステップ90においては、踏み込みストロークSbp及び踏力Fbpの時間微分値Sbpd及びFbpdが演算されると共に、下記の式(2)に従って制動の操作量増減指標値INbが演算される。なお、INbが正の値であるときには、制動操作は操作量増大操作であり、INbが負の値であるときには、制動操作は操作量低減操作である。INbが0であるときには、ブレーキペダル58が駆動されていない状況、即ち、制動操作は操作量保持(Sbp及びFbpは正で一定)又は非制動位置保持(Sbp=Fbp=0)である。
INb=Sbpd・Fbp+Sbp・Fbpd ……(2)
INb=Sbpd・Fbp+Sbp・Fbpd ……(2)
ステップ100においては、アクセル開度Acc及び踏力Fapの時間微分値Accd及びFapdが演算されると共に、下記の式(3)に従って駆動の操作量増減指標値INdが演算される。なお、INdが正の値であるときには、駆動操作は操作量増大操作である。INdが負の値であるときには、駆動操作は操作量低減操作である。INdが0であるときには、アクセルペダル72が駆動されていない状況、即ち、駆動操作は操作量保持(Acc及びFapは正で一定)又は非駆動位置保持(Acc=Fap=0)である。
INd=Accd・Fap+Acc・Fapd ……(3)
INd=Accd・Fap+Acc・Fapd ……(3)
ステップ110においては、図5に示されたフローチャートに従って、指標値INs、INb及びINdに基づいて、それぞれ目標基本アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftに対する修正係数Kab、Kdt及びKftが演算される。なお、修正係数Kab、Kdt及びKftの標準値Kabn、Kdtn及びKftnは、正の定数(例えば1)である。図5に示されたフローチャートに従って行われる修正係数Kab、Kdt及びKftの演算については後述する。
ステップ140においては、目標操舵アシストトルクTatが、目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftと、修正係数Kab、Kdt及びKftとに基づいて、下記の式(4)に従って演算される。
Tat=Kab・Tab+Kdt・Tdt+Kft・Tft ……(4)
Tat=Kab・Tab+Kdt・Tdt+Kft・Tft ……(4)
ステップ150においては、パワーステアリングユニット14が付与する実際の操舵アシストトルクTaが目標操舵アシストトルクTatになるよう、目標操舵アシストトルクTatに基づいてパワーステアリングユニット14が制御される。
次に、図3に示されたフローチャートを参照して、上記ステップ40に於ける目標摩擦トルクTftの演算について説明する。
まず、ステップ45においては、操舵角θの絶対値及び車速Vに基づいて、図8に示されたマップから、目標基本摩擦トルクTfbtが演算される。図8に示されているように、目標基本摩擦トルクTfbtは、操舵角θの絶対値が大きいほど大きくなると共に、車速Vが高いほど大きくなるよう演算される。なお、目標基本摩擦トルクTfbtは、操舵角θの正負に関係なく常に正の値である。
図には示されていないが、車速Vが中高車速域にあるときには、操舵角θの絶対値が大きいほどセルフアライニングトルクTsatが大きくなる。よって、操舵角θの大きさが大きい領域における保舵力を低減し操舵の安定性を向上させるために、目標基本摩擦トルクTfbtは操舵角θの大きさが大きいほど大きい値に演算される。また、セルフアライニングトルクTsatは車速Vが高いほど大きくなる。よって、車速Vが高いほど中高速走行時に必要な保舵力を低減し操舵の安定性を向上させると共に、低速走行時における操舵抵抗を低減するために、目標摩擦トルクTftは車速Vが高いほど大きい値に演算される。
ステップ50においては、図4に示されたフローチャートに従って、摩擦トルクを制御するための目標操舵角θtが演算される。なお、図4に示されたフローチャートに従って行われる目標操舵角θtの演算については後述する。
ステップ60においては、操舵角θ及び目標操舵角θtに基づいて、下記の式(5)に従って目標付加摩擦トルクTctが演算される。なお、下記の式(5)におけるゲインKは、正の値であり、ステップ50の目標操舵角θtの演算において使用されるゲインKと同一である(後述のステップ53の説明参照)。下記の式(5)から解るように、目標付加摩擦トルクTctの符号、即ちその作用方向は、操舵角θ及び目標操舵角θtの大小関係によって決定される。
Tct=K(θt−θ) …(5)
Tct=K(θt−θ) …(5)
ステップ65においては、操舵トルクTの絶対値に基づいて、図9に示されたマップから、トルクゲインKtが演算される。トルクゲインKtは、操舵トルクTの絶対値が基準値T0(正の値)未満のときには、操舵トルクTの絶対値が大きいほど0以上で1未満の範囲にて大きくなり、操舵トルクTの絶対値が基準値T0以上のときには、1になるよう、演算される。
ステップ70においては、目標付加摩擦トルクTctにトルクゲインKtが乗算されることにより、目標付加摩擦トルクTctが補正される。よって、操舵角θ及び車速Vが同一であっても、目標付加摩擦トルクTctの大きさは、操舵トルクTの絶対値が大きいほど大きくなる。
ステップ75においては、補正後の目標付加摩擦トルクTctがローパスフィルタ処理されることにより、高周波のノイズ成分が除去されたローパスフィルタ処理後の目標付加摩擦トルクTctf(目標摩擦トルクTft)が演算される。ステップ75が完了すると、制御は図2に示されたステップ80へ進む。
なお、以上のステップ45〜60及び75による目標摩擦トルクTftの演算について、必要ならば本願出願人の出願にかかる特開2009−126244号公報を参照されたい。
次に、図4に示されたフローチャートを参照して、上記ステップ50における目標操舵角θtの演算について説明する。
まず、ステップ51においては、目標操舵角θtの初期化が完了しているか否かの判別、即ち、今回が制御の初回であるか否かの判別が行われる。肯定判別が行われたときには、制御はステップ53へ進み、否定判別が行われたときには、制御はステップ52へ進む。
ステップ52においては、目標操舵角θtが現在の操舵角θに設定されることにより、目標操舵角θtの初期化が行われる。なお、目標操舵角θtの初期値は0であってもよい。
ステップ53においては、前回のステップ40において演算された目標摩擦トルクTftとゲインKとの積Tft・Kとして、偏差上限値Δが演算される。なお、目標摩擦トルクTft及びゲインKは正の値であるので、偏差上限値Δも正の値である。ゲインKは、操舵系の剛性などを考慮して決定される任意の固定値であってよい。ただし、ゲインKが、操舵系の最も剛性が低い部位(一般的には、アッパステアリングシャフト22に組み込まれるトーションバーの部分)の捩じり剛性よりも低い値である場合には、ステアリングホイール20を回転させても操舵輪の舵角を目標操舵角θtに対応する舵角にすることができない。よって、ゲインKは、操舵系の最も剛性が低い部位の捩じり剛性よりも高い値であることが好ましい。
ステップ54においては、操舵角θが目標操舵角θtと偏差上限値Δとの和θt+Δよりも大きいか否かの判別、即ち、目標操舵角θtの低減修正が必要であるか否かの判別が行われる。否定判別が行われたときには、制御はステップ56へ進み、肯定判別が行われたときには、ステップ55において目標操舵角θtが操舵角θから偏差上限値Δが減算された値θ−Δに修正される。
ステップ56おいては、操舵角θが目標操舵角θtと偏差上限値Δとの差θt−Δよりも小さいか否かの判別、即ち、目標操舵角θtの増大修正が必要であるか否かの判別が行われる。否定判別が行われたときには、制御はステップ60へ進み、肯定判別が行われたときには、制御はステップ57において目標操舵角θtが操舵角θに偏差上限値Δが加算された値θ+Δに修正される。
なお、以上の目標操舵角θtの演算についても、必要ならば上記特開2009−126244号公報を参照されたい。
次に、図5に示されたフローチャートを参照して、上記ステップ110における修正係数Kab、Kdt及びKftの演算について説明する。
まず、ステップ112においては、ストロークセンサ66からの信号などに基づいて、運転者が制動操作を行っているか否かの判別、即ち車両が制動中であるか否かの判別が行われる。車両が制動中でないと判別されたときには、制御はステップ126へ進み、車両が制動中であると判別されたときには、制御はステップ114へ進む。
ステップ114においては、操舵の能動・受動指標値INsが正の値であるか否かの判別、即ち操舵操作が能動的な操舵操作であるか否かの判別が行われる。操舵操作が能動的な操舵操作でないと判別されたときには、制御はステップ122へ進み、操舵操作が能動的な操舵操作であると判別されたときには、制御はステップ116へ進む。
ステップ116においては、制動の操作量増減指標値INbが正の値であるか否かの判別、即ち制動操作が操作量増大操作であるか否かの判別が行われる。制動操作が操作量増大操作でないと判別されたときには、ステップ118において修正係数Kab、Kdt及びKftがそれぞれ標準値Kabn、Kdtn及びKftn(何れも正の定数)に設定される。制動操作が操作量増大操作であると判別されたときには、ステップ120において修正係数Kabが標準値Kabnよりも大きい値Kabh(正の定数)に設定され、修正係数Kdt及びKftがそれぞれ標準値Kdtn及びKftnよりも小さい値Kdtl及びKftl(何れも正の定数)に設定される。なお、ステップ120においては、修正係数Kabは標準値Kabnよりも大きい値Kabhに設定されることが好ましいが、標準値Kabnに設定されてもよい。
ステップ122においては、制動の操作量増減指標値INbが正の値又は0であるか否かの判別、即ち制動操作が操作量増大操作又は保持(操作量保持又は非制動位置保持)であるか否かの判別が行われる。制動操作が操作量低減操作であると判別されたときには、制御はステップ118へ進む。制動操作が操作量増大操作又は保持であると判別されたときには、ステップ124において修正係数Kabが標準値Kabnに設定され、修正係数Kdt及びKftがそれぞれ標準値Kdtn及びKftnよりも大きい値Kdth及びKfth(何れも正の定数)に設定される。なお、ステップ124においては、修正係数Kabは標準値Kabnよりも小さい値Kabl(正の定数)に設定されてもよい。
以上のステップ112〜124において設定される修正係数Kab、Kdt及びKftと、操舵操作及び制動操作との関係は、下記の表1の通りである。なお、下記の表1において、制動操作が保持とは、制動操作が保持であると判定される場合であって、制動操作量が正の値である場合である。制動操作が非制動とは、制動操作が保持であると判定される場合であって、制動操作量が0の場合である。

ステップ126においては、アクセル開度センサ74からの信号などに基づいて、運転者が駆動操作を行っているか否かの判別、即ち車両が駆動中であるか否かの判別が行われる。車両が駆動中でないと判別されたときには、即ち車両が慣性走行中であると判別された時には、制御はステップ118へ進み、車両が駆動中であると判別されたときには、制御はステップ128へ進む。
ステップ128においては、駆動の操作量増減指標値INdが正の値であるか否かの判別、即ち駆動操作が操作量増大操作であるか否かの判別が行われる。駆動操作が操作量増大操作でないと判別されたときには、制御はステップ118へ進み、駆動操作が操作量増大操作であると判別されたときには、制御はステップ130へ進む。
ステップ130においては、操舵の能動・受動指標値INsが0であるか否かの判別により、操舵操作が保持、即ち保舵又は中立位置保持であるか否かの判別が行われる。舵操作が保舵又は中立位置保持であると判別されたときには、制御はステップ124へ進み、舵操作が保舵又は中立位置保持でないと判別されたときには、制御はステップ132へ進む。
ステップ132においては、操舵の能動・受動指標値INsが負の値であるか否かの判別、即ち操舵操作が受動操作であるか否かの判別が行われる。操舵操作が受動操作でないと判別されたときには、制御はステップ118へ進む。操舵操作が受動操作であると判別されたときには、ステップ134において修正係数Kab及びKdtがそれぞれ標準値Kabn及びKdtnに設定され、修正係数Kftが標準値Kftnよりも小さい値Kftlに設定される。
以上のステップ124〜134において設定される修正係数Kab、Kdt及びKftと、操舵操作及び駆動操作との関係は、下記の表2の通りである。なお、下記の表2において、駆動操作が保持とは、駆動操作が保持であると判定される場合であって、駆動操作量が正の値である場合である。駆動操作が非駆動とは、駆動操作が保持であると判定される場合であって、駆動操作量が0の場合である。
以上の説明から解るように、ステップ20〜40において、それぞれ目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftが演算される。ステップ80〜100において、それぞれ操舵の能動・受動指標値INs、制動の操作量増減指標値INb及び駆動の操作量増減指標値INdが演算される。ステップ110において、指標値INs、INb及びINdに基づいて、それぞれ目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftに対する修正係数Kab、Kdt及びKftがそれぞれ演算される。
ステップ140において、修正係数Kabと目標基本操舵アシストトルクTabとの積、修正係数Kdtと目標減衰トルクTdtとの積、及び、修正係数Kftと目標摩擦トルクTftとの積、の和として、目標操舵アシストトルクTatが演算される。更に、ステップ150において、パワーステアリングユニット14の実際の操舵アシストトルクTaが目標操舵アシストトルクTatになるように、目標操舵アシストトルクTatに基づいてパワーステアリングユニット14が制御される。
次に、<A.運転者により制動操作が行われている場合>及び<B.運転者により駆動操作が行われている場合>に分けて、運転者の種々の操舵操作の状況について、実施形態における操舵アシストトルクの制御を説明する。なお、下記のA−1〜A−3及びB−1〜B−3の何れの場合にも、図2に示されたフローチャートのステップ110以外のステップは同様に実行される。
<A.運転者により制動操作が行われている場合>
<A−1.操舵操作が能動操作であり、制動操作量が増大する場合>
ステップ112〜116において、それぞれ肯定判別が行われる。ステップ120において修正係数Kabが標準値Kabnよりも大きい値Kabhに設定され、修正係数Kdtが標準値Kdtnよりも小さい値Kdtlに設定され、修正係数Kftが標準値Kftnよりも小さい値Kftlに設定される。
<A−1.操舵操作が能動操作であり、制動操作量が増大する場合>
ステップ112〜116において、それぞれ肯定判別が行われる。ステップ120において修正係数Kabが標準値Kabnよりも大きい値Kabhに設定され、修正係数Kdtが標準値Kdtnよりも小さい値Kdtlに設定され、修正係数Kftが標準値Kftnよりも小さい値Kftlに設定される。
「操舵操作が能動操作であり、制動操作量が増大する場合」とは、例えば緊急回避運転時のように、運転者が車両を減速させつつ車両の進行方向を積極的に変更しようとする場合である。上記修正係数の設定によれば、目標基本操舵アシストトルクTabのゲインが増大されると共に、目標減衰トルクTdt及び目標摩擦トルクTftのゲインが低減されるので、運転者が左右の前輪を効率的に操舵することができるようになる。よって、指標値INs、INb及びINdに基づいて、操舵操作が能動操作であり且つ制動操作量が増大する状況を早期に検出し、運転者が車両を減速させつつ車両の進行方向を積極的に変更しようとする要求を早期に且つ効果的に充足させることができる。
<A−2.操舵操作が能動操作ではなく、制動操作量が増大されるか又は保持される場合>
ステップ112において、肯定判別が行われ、ステップ114において、否定判別が行われ、ステップ122において、肯定判別が行われる。更に、ステップ124において、修正係数Kabが標準値Kabnに設定され、修正係数Kdtが標準値Kdtnよりも大きい値Kdthに設定され、修正係数Kftが標準値Kftnよりも大きい値Kfthに設定される。
ステップ112において、肯定判別が行われ、ステップ114において、否定判別が行われ、ステップ122において、肯定判別が行われる。更に、ステップ124において、修正係数Kabが標準値Kabnに設定され、修正係数Kdtが標準値Kdtnよりも大きい値Kdthに設定され、修正係数Kftが標準値Kftnよりも大きい値Kfthに設定される。
「操舵操作が能動操作ではなく、制動操作量が増大され又は保持される場合」とは、例えば運転者が車両の進行方向を積極的に変更しようとせずに、車両を積極的に減速させようとする場合である。上記修正係数の設定によれば、目標基本操舵アシストトルクTabのゲインが標準のゲインに設定されると共に、目標減衰トルクTdt及び目標摩擦トルクTftのゲインが増大されるので、左右の前輪は路面から受ける力によって操舵され難くなる。よって、指標値INs、INb及びINdに基づいて、操舵操作が能動操作ではなく、制動操作量が増大し又は保持である状況を早期に検出し、運転者が車両を減速させる状況において前輪が路面からの力によって操舵されることを早期に且つ効果的に抑制することができる。従って、制動による車両の減速時の走行安定性の向上を早期に且つ効果的に達成することができる。
なお、車両の制動時に左右の前輪が路面から受ける力によって操舵される場合として、左右の前輪の制動力に差がある場合、輪だちなどの路面外乱によって前輪が操舵される力を受ける場合などがある。上記修正係数の設定によれば、上記のような外乱によって前輪が操舵され、ステアリングホイールが回転される現象(俗に「ハンドル取られ」と呼ばれる現象)を抑制することができる。よって、車両の制動時における走行安定性を向上させることができる。
<A−3.上記以外の場合>
ステップ112及び114において、それぞれ肯定判別が行われ、ステップ116において、否定判別が行われる。あるいは、ステップ112において、肯定判別が行われ、ステップ114及び122において、それぞれ否定判別が行われる。更に、ステップ118において、修正係数Kab、Kdt及びKftがそれぞれ標準値Kabn、Kdtn及びKftnに設定される。
ステップ112及び114において、それぞれ肯定判別が行われ、ステップ116において、否定判別が行われる。あるいは、ステップ112において、肯定判別が行われ、ステップ114及び122において、それぞれ否定判別が行われる。更に、ステップ118において、修正係数Kab、Kdt及びKftがそれぞれ標準値Kabn、Kdtn及びKftnに設定される。
上記A−1及びA−2の何れでもない場合には、目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftのゲインを通常時のゲインに設定することができる。よって、車両の制動時に各ゲインが不必要に高くなったり低くなったりすることを防止すると共に、上記A−1又はA−2の状況からそれらの何れでもない状況になった場合に、速やかに通常時のゲインに戻すことができる。
例えば、操舵操作が能動操作ではない場合において、制動操作量が増大又は保持から低減に変化する際に、制動操作の低減を早期に判定し、A−2の状況において増大されていた修正係数Kdt及びKftを速やかにそれぞれ標準値Kdtn及びKftnに戻すことができる。よって、車両が制動による減速を伴って走行している状況で湾曲路などに差し掛かり、制動操作量の低減が開始され、制動操作量が低減される過程において操舵操作が開始される場合に、操舵操作の開始に先立って修正係数Kdt及びKftを低減することができる。よって、操舵操作が開始される前に開始目標減衰トルクTdt及び目標摩擦トルクTftの大きさを低減し、操舵操作の開始当初から運転者が操舵輪の舵角を変化させ易くすることができる。
図10及び図11は、制動操作の終了時に操舵が行われる場合における修正係数Kdt及びKftの変化を、それぞれ従来の場合及び実施形態の場合について示すタイムチャートである。なお、従来の場合には、制動操作量が判定基準値以上になることにより車両が制動されていると判定され、車両が制動されていると判定されているときに修正係数Kdt及びKftがそれぞれKdth及びKfthに設定される。
図10及び図11に示された状況では、時点t1において制動操作が開始され、時点t3まで制動操作量が漸次増大され、時点t3から時点t4まで制動操作量が実質的に一定に保持され、時点t4から時点t7まで制動操作量が漸次低減される。そして、時点t4よりも遅く時点t7よりも早い時点t5において操舵が開始されたとする。
図10に示された従来の場合には、時点t1よりも遅い時点t2において、制動操作量が判定基準値以上になると、制動が開始されたと判定され、時点t4よりも遅く時点t7よりもい早い時点t6において、制動操作量が判定基準値以下になり、制動が終了されたと判定される。よって、時点t2から時点t6まで車両が制動されていると判定され、修正係数Kdt及びKftがそれぞKdth及びKfthに設定される。
時点t1において制動操作が開始されても、制動が開始されたと判定される時点t2まで、修正係数Kdt及びKftはそれぞれ標準値Kdtn及びKftnのままである。よって、制動開始時に修正係数Kdt及びKftをそれぞれ標準値Kdtn及びKftnよりも高い値Kdth及びKfthにそれぞれ切り替えるタイミングが遅れ、前輪の舵角の変化を効果的に抑制することができない。また、時点t5において操舵が開始されても、制動が終了したと判定される時点t6まで、修正係数Kdt及びKftは標準値Kdtn及びKftnよりも高い値Kdth及びKfthに設定されたままである。よって、制動操作量が減少する状況において操舵が開始された場合に、修正係数Kdt及びKftを標準値Kdtn及びKftnに戻すタイミングが遅れ、操舵操作し易くすることに遅れが生じる。
これに対し、実施形態によれば、図11に示されているように、制動操作が開始される時点t1から時点t3まで操舵操作量が増大と判定され、時点t3から時点t4まで操舵操作量が保持と判定され、時点t4から時点t7まで操舵操作量が低減と判定される。よって、時点t1において修正係数Kdt及びKftをそれぞれ標準値Kdtn及びKftnよりも高い値Kdth及びKfthにそれぞれ切り替えることができ、制動開始当初から前輪の舵角の変化を効果的に抑制し、車両の走行安定性を効果的に向上させることができる。また、操舵が開始される時点t5よりも早い時点t4において、修正係数Kdt及びKftを標準値Kdtn及びKftnに戻すことができ、操舵操作の開始時から操舵操作をし易くすることができる。
<B.運転者により駆動操作が行われている場合>
<B−1.駆動操作量が増大され、操舵操作が保舵又は中立位置保持である場合>
ステップ112において、否定判別が行われ、ステップ126乃至130において、それぞれ肯定判別が行われる。更に、ステップ124において、修正係数Kabが標準値Kabnに設定され、修正係数Kdtが標準値Kdtnよりも大きい値Kdthに設定され、修正係数Kftが標準値Kftnよりも大きい値Kfthに設定される。
<B−1.駆動操作量が増大され、操舵操作が保舵又は中立位置保持である場合>
ステップ112において、否定判別が行われ、ステップ126乃至130において、それぞれ肯定判別が行われる。更に、ステップ124において、修正係数Kabが標準値Kabnに設定され、修正係数Kdtが標準値Kdtnよりも大きい値Kdthに設定され、修正係数Kftが標準値Kftnよりも大きい値Kfthに設定される。
「駆動操作量が増大され、操舵操作が保舵又は中立位置保持である場合」とは、例えば運転者が車両の旋回状態又は直進状態を維持しつつ、車両を積極的に加速させようとする場合である。上記修正係数の設定によれば、目標基本操舵アシストトルクTabのゲインが標準のゲインに設定されると共に、目標減衰トルクTdt及び目標摩擦トルクTftのゲインが増大されるので、左右の前輪が路面から受ける力によって操舵され難くなる。よって、指標値INs、INb及びINdに基づいて、駆動操作量が増大し、操舵操作が保舵又は中立位置保持である状況を早期に検出し、運転者が車両を加速させる状況において前輪が路面からの力によって操舵されることを早期に且つ効果的に抑制することができる。従って、車両の加速時の走行安定性の向上を早期に且つ効果的に達成することができる。
なお、車両の加速時に左右の前輪が路面から受ける力によって操舵される場合として、左右の前輪の駆動力に差がある場合、輪だちなどの路面外乱によって前輪が操舵される力を受ける場合などがある。上記修正係数の設定によれば、上記A−2の場合と同様に、上記のような外乱によって前輪が操舵されることを抑制することができるので、車両を安定して加速させることができる。
<B−2.駆動操作量が増大され、操舵操作が受動である場合>
ステップ112において、否定判別が行われ、ステップ126及び128において、それぞれ肯定判別が行われる。ステップ130において、否定判別が行われ、ステップ132において、肯定判別が行われる。更に、ステップ134において、修正係数Kab及びKdtがそれぞれ標準値Kabn及びKdtnに設定され、修正係数Kftが標準値Kftnよりも小さい値Kftlに設定される。
ステップ112において、否定判別が行われ、ステップ126及び128において、それぞれ肯定判別が行われる。ステップ130において、否定判別が行われ、ステップ132において、肯定判別が行われる。更に、ステップ134において、修正係数Kab及びKdtがそれぞれ標準値Kabn及びKdtnに設定され、修正係数Kftが標準値Kftnよりも小さい値Kftlに設定される。
「駆動操作量が増大され、操舵操作が受動である場合」とは、例えば運転者がステアリングホイール20の回転を許容しつつ、車両を積極的に加速させようとする場合である。上記修正係数の設定によれば、目標基本操舵アシストトルクTab及び目標減衰トルクTdtのゲインがそれぞれ標準のゲインに設定されると共に、目標摩擦トルクTftのゲインが低減されるので、ステアリングホイール20が中立位置へ戻り易くなる。よって、指標値INs、INb及びINdに基づいて、駆動操作量が増大し、操舵操作が受動である状況を早期に検出し、運転者が車両を加速させる状況において運転者の戻し操舵を要することなくステアリングホイール20が中立位置へ効率的に戻る状況を早期に且つ効果的に達成することができる。従って、車両の加速時に運転者がステアリングホイール20を中立位置へ戻す操舵を行う煩わしさを感じる虞を低減することができる。
<B−3.上記以外の場合>
ステップ112において、否定判別が行われ、ステップ126及び128の何れかにおいて、否定判別が行われる。あるいは、ステップ112において、否定判別が行われ、ステップ126及び128において、それぞれ肯定判別が行われ、ステップ130及び132において、それぞれ否定判別が行われる。更に、ステップ118において、修正係数Kab、Kdt及びKftがそれぞれ標準値Kabn、Kdtn及びKftnに設定される。
ステップ112において、否定判別が行われ、ステップ126及び128の何れかにおいて、否定判別が行われる。あるいは、ステップ112において、否定判別が行われ、ステップ126及び128において、それぞれ肯定判別が行われ、ステップ130及び132において、それぞれ否定判別が行われる。更に、ステップ118において、修正係数Kab、Kdt及びKftがそれぞれ標準値Kabn、Kdtn及びKftnに設定される。
上記B−1及びB−2の何れでもない場合には、目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftのゲインを通常時のゲインに設定することができる。よって、車両の駆動時に各ゲインが不必要に高くなったり低くなったりすることを防止すると共に、上記B−1及びB−2の状況からそれらの何れでもない状況になった場合に、速やかに通常時のゲインに戻すことができる。
以上の説明より解るように、上述の実施形態によれば、操舵の能動・受動指標値INsは、上記式(1)に従って、操舵角速度θdと操舵トルクTとの積と、操舵角θと操舵トルクTの時間微分値Tdとの積との和として演算される。従って、指標値が操舵角速度θdと操舵トルクTとの積又は操舵角θと操舵トルクTの時間微分値Tdとの積である場合に比して、操舵操作が能動的な操舵操作、受動的な操舵操作、保舵又は中立位置保持の何れであるかを早期に且つ正確に判定することができる。
また、制動の操作量増減指標値INbは、上記式(2)に従って、踏み込みストロークSbpの時間微分値Sbpdと踏力Fbpとの積と、踏み込みストロークSbpと踏力Fbpの時間微分値Fbpdとの積との和として演算される。従って、指標値が踏み込みストロークSbpの時間微分値Sbpdと踏力Fbpとの積又は踏み込みストロークSbpと踏力Fbpの時間微分値Fbpdとの積である場合に比して、制動操作が操作量増大、操作量低減、操作量保持又は非制動位置保持の何れの操作であるかを早期に且つ正確に判定することができる。
更に、駆動の操作量増減指標値INdは、上記式(3)に従って、アクセル開度Accの時間微分値Accdと踏力Fapとの積と、アクセル開度Accと踏力Fapの時間微分値Fapdとの積との和として演算される。従って、指標値がアクセル開度Accの時間微分値Accdと踏力Fapとの積又はアクセル開度Accと踏力Fapの時間微分値Fapdとの積である場合に比して、駆動操作が操作量増大、操作量低減、操作量保持又は非駆動位置保持の何れの操作であるかを早期に且つ正確に判定することができる。
以上においては、本発明を特定の実施形態について詳細に説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の範囲内にて他の種々の実施形態が可能であることは当業者にとって明らかであろう。
例えば、上述の実施形態においては、制駆動操作が操作量増大操作、操作量低減操作及び保持の何れであるかの判定は、前記ペダルの移動量の変化速度と前記ペダルに与えられる操作力との積及び前記ペダルの移動量と前記ペダルに与えられる操作力の微分値との積の和に基づいて行われる。しかし、制駆動操作の判定は、ペダルの移動量の変化速度及びペダルに与えられる操作力の微分値の一方により行われてもよく、ペダルの移動量の変化速度及びペダルに与えられる操作力の微分値の両者により行われてもよい。特に、後者の場合には、ペダルの移動量の変化速度及びペダルに与えられる操作力の微分値の両者が正の値である場合に、制駆動操作が操作量増大操作であると判定され、上記両者が負の値である場合に、制駆動操作が操作量低減操作であると判定されてよい。更に、上記両者が0である場合及び上記両者の一方が正の値で他方が負の値である場合に、制駆動操作が保持であると判定されてよい。
また、上述の実施形態においては、ステップ80において操舵の能動・受動指標値INsが演算されステップ90において制動の操作量増減指標値INbが演算され、ステップ100において駆動の操作量増減指標値INdが演算される。そして、車両の制動時には、ステップ112〜124において、指標値INs及びINbに基づいて修正係数Kab、Kdt及びKftが可変設定される。車両の駆動時には、ステップ124〜134において、指標値INs及びINdに基づいて修正係数Kab、Kdt及びKftが可変設定される。しかし、指標値INb及びINdの一方の演算が省略され、省略された指標値に基づく修正係数の可変設定が省略されてもよい。
また、上述の実施形態においては、目標操舵アシストトルクTatは、それぞれ修正係数Kab、Kdt及びKftと目標基本操舵アシストトルクTab、目標減衰トルクTdt及び目標摩擦トルクTftとの積の和として演算される。しかし、目標操舵アシストトルクTatは、他の制御成分、例えばステアリングホイール20を中立位置へ戻すための戻しトルク、操舵系の慣性を補償するための慣性補償トルク及び他のトルクの何れかを含んでいてもよい。
更に、上述の実施形態においては、上記A−2の場合には、修正係数Kab、Kdt及びKftは、それぞれ標準値よりも大きい値Kabh、Kdth及びKfthに設定される。上記A−1の場合には、修正係数Kdt及びKftは、それぞれ標準値よりも大きい小さい値Kdtl及びKftlに設定されるようになっている。しかし、修正係数Kab、Kdt及びKftは、例えば対応するINbなどの指標値の大きさ及び車速などの車両の走行パラメータに基づいて、二段階以上に増大又は低減されるよう修正されてもよい。
10…電動パワーステアリング装置、12…車両、14…パワーステアリングユニット、16…パワーステアリング制御装置、18…操舵装置、20…ステアリングホイール、42L,42R…前輪、48…操舵角センサ、50…トルクセンサ、52…制動装置、58…ブレーキペダル、64…踏力センサ、66…ストロークセンサ、70…エンジン制動装置、72…アクセルペダル、74…アクセル開度センサ、76…踏力センサ
Claims (7)
- 車両の操舵装置に操舵アシストトルクを付与するアシストトルク付与装置と、目標操舵アシストトルクを演算し、前記操舵装置に付与される実際の操舵アシストトルクが前記目標操舵アシストトルクになるように前記アシストトルク付与装置を制御する制御装置と、を有し、前記目標操舵アシストトルクは、少なくとも操舵トルクに基づいて演算される目標基本操舵アシストトルクと、少なくとも操舵角速度に基づいて演算される目標減衰トルク及び少なくとも操舵角に基づいて演算される目標摩擦トルクの少なくとも一方である補助制御量と、を含む車両の電動パワーステアリング装置において、
前記制御装置は、運転者の操舵操作が運転者から前記操舵装置に操舵のエネルギが与えられる「能動操作」、前記操舵装置から運転者に操舵のエネルギが与えられる「受動操作」及び前記操舵装置と運転者との間にて操舵のエネルギの授受が行われない「保持」の何れであるかを判定する第一の判定装置と、前記車両を加減速させるための運転者の加減速操作が操作量増大操作、操作量低減操作及び操作量保持の何れであるかを判定する第二の判定装置とを有し、前記第一及び第二の判定装置の判定結果に基づいて、前記補助制御量を修正する、電動パワーステアリング装置。 - 請求項1に記載の電動パワーステアリング装置において、運転者の操舵操作はステアリングホイールを回転させることにより行われ、前記第一の判定装置は、操舵角速度と操舵トルクとの積及び操舵角と操舵トルクの微分値との積の和に基づいて、運転者の操舵操作が前記能動操作、前記受動操作及び前記保持の何れであるかを判定する、電動パワーステアリング装置。
- 請求項1に記載の電動パワーステアリング装置において、運転者の加減速操作はペダルを操作することにより行われ、前記ペダルを操作することにより行われる加減速操作の量は、前記ペダルの移動量及び前記ペダルに与えられる操作力のそれぞれの増大に応じて増大し、前記第二の判定装置は、前記ペダルの移動量の変化速度、前記ペダルに与えられる操作力の微分値、及び「前記ペダルの移動量の変化速度と前記ペダルに与えられる操作力との積及び前記ペダルの移動量と前記ペダルに与えられる操作力の微分値との積の和」の少なくとも一つに基づいて、運転者の加減速操作が前記操作量増大操作、前記操作量低減操作及び前記操作量保持の何れであるかを判定する、電動パワーステアリング装置。
- 請求項3に記載の電動パワーステアリング装置において、前記ペダルはブレーキペダルであり、前記制御装置は、運転者の加減速操作が制動操作である状況において、運転者の操舵操作が前記受動操作及び前記保持の一方であると判定されている場合には、運転者の制動操作が前記操作量増大操作及び前記操作量保持の一方であると判定されているときには、運転者の制動操作が前記操作量低減操作であると判定されているときに比して、前記補助制御量の大きさを大きくする、電動パワーステアリング装置。
- 請求項3に記載の電動パワーステアリング装置において、前記ペダルはブレーキペダルであり、前記制御装置は、運転者の加減速操作が制動操作である状況において、運転者の操舵操作が前記能動操作であると判定され且つ運転者の制動操作が前記操作量増大操作であると判定されている場合には、運転者の操舵操作が前記能動操作であると判定され且つ運転者の制動操作が前記操作量低減操作及び前記制動操作量保持の何れか一方であると判定されている場合に比して、前記補助制御量の大きさを小さくする、電動パワーステアリング装置。
- 請求項3に記載の電動パワーステアリング装置において、前記ペダルはアクセルペダルであり、前記制御装置は、運転者の加減速操作が加速操作である状況において、運転者の加速操作が前記操作量増大操作であると判定されている場合には、運転者の操舵操作が前記保持であると判定されているときには、運転者の操舵操作が前記能動操作であると判定されているときに比して、前記補助制御量の大きさを大きくする、電動パワーステアリング装置。
- 請求項3に記載の電動パワーステアリング装置において、前記補助制御量は前記目標摩擦トルクを含み、前記ペダルはアクセルペダルであり、前記制御装置は、運転者の加減速操作が加速操作である状況において、運転者の加速操作が前記操作量増大操作であると判定されている場合には、運転者の操舵操作が前記受動操作であると判定されているときには、運転者の操舵操作が前記受動操作ではないと判定されているときに比して、前記目標摩擦トルクの大きさを小さくする、電動パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015103726A JP2016215864A (ja) | 2015-05-21 | 2015-05-21 | 電動パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015103726A JP2016215864A (ja) | 2015-05-21 | 2015-05-21 | 電動パワーステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016215864A true JP2016215864A (ja) | 2016-12-22 |
Family
ID=57579339
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015103726A Pending JP2016215864A (ja) | 2015-05-21 | 2015-05-21 | 電動パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016215864A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210001922A1 (en) * | 2019-07-05 | 2021-01-07 | Subaru Corporation | Vehicle steering assist device |
| JP2021070393A (ja) * | 2019-10-30 | 2021-05-06 | トヨタ自動車株式会社 | 車両の操舵反力トルク制御装置 |
| US11472475B2 (en) | 2017-12-08 | 2022-10-18 | Hyundai Motor Company | Control apparatus and method for catch-up reduction in motor driven power steering system |
| GB2621362A (en) * | 2022-08-09 | 2024-02-14 | Zf Automotive Uk Ltd | A dual motor assembly |
-
2015
- 2015-05-21 JP JP2015103726A patent/JP2016215864A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11472475B2 (en) | 2017-12-08 | 2022-10-18 | Hyundai Motor Company | Control apparatus and method for catch-up reduction in motor driven power steering system |
| US20210001922A1 (en) * | 2019-07-05 | 2021-01-07 | Subaru Corporation | Vehicle steering assist device |
| US11498618B2 (en) * | 2019-07-05 | 2022-11-15 | Subaru Corporation | Vehicle steering assist device |
| JP2021070393A (ja) * | 2019-10-30 | 2021-05-06 | トヨタ自動車株式会社 | 車両の操舵反力トルク制御装置 |
| JP7188357B2 (ja) | 2019-10-30 | 2022-12-13 | トヨタ自動車株式会社 | 車両の操舵反力トルク制御装置 |
| GB2621362A (en) * | 2022-08-09 | 2024-02-14 | Zf Automotive Uk Ltd | A dual motor assembly |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102071779B1 (ko) | 파워 스티어링 장치의 제어 장치 및 파워 스티어링 장치 | |
| JP5494176B2 (ja) | 車両用操舵装置 | |
| JP4293021B2 (ja) | 車両用操舵装置 | |
| JP6515754B2 (ja) | 車両の操舵反力制御装置 | |
| JP4556775B2 (ja) | 車両用操舵装置 | |
| KR102274126B1 (ko) | 전동식 조향 시스템의 제어 장치 및 방법 | |
| JP6380366B2 (ja) | 車両用操舵支援装置 | |
| CN109808767B (zh) | 用于使车辆转向的方法和转向系统 | |
| JP2000238654A (ja) | 操舵制御装置 | |
| JP4997478B2 (ja) | 車両用操舵装置 | |
| JP2016215864A (ja) | 電動パワーステアリング装置 | |
| JP2005343315A (ja) | 車両用操舵装置 | |
| JP4293106B2 (ja) | 電動式パワーステアリング装置用制御装置 | |
| US11964665B2 (en) | Vehicle speed calculating device and control device for vehicle | |
| JP2012035708A (ja) | 操舵制御装置 | |
| JP2003252229A (ja) | 車両用操舵制御装置 | |
| JP5347499B2 (ja) | 車両制御装置及び車両制御方法 | |
| US12077140B2 (en) | Vehicle control system | |
| US11958465B2 (en) | Vehicle control system | |
| JP6515783B2 (ja) | 車両の操舵反力制御装置 | |
| JP2016107810A (ja) | パワーステアリング制御装置 | |
| JP6453102B2 (ja) | 車両運動制御装置 | |
| JP6237105B2 (ja) | 車両制御装置 | |
| WO2020026492A1 (ja) | 操舵制御装置及び操舵制御方法 | |
| JP2006158149A (ja) | 車両の制駆動力制御装置 |