JP2016200737A - レンズ装置及びそれを有する撮影システム - Google Patents
レンズ装置及びそれを有する撮影システム Download PDFInfo
- Publication number
- JP2016200737A JP2016200737A JP2015081282A JP2015081282A JP2016200737A JP 2016200737 A JP2016200737 A JP 2016200737A JP 2015081282 A JP2015081282 A JP 2015081282A JP 2015081282 A JP2015081282 A JP 2015081282A JP 2016200737 A JP2016200737 A JP 2016200737A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- speed command
- change rate
- correction
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/69—Control of means for changing angle of the field of view, e.g. optical zoom objectives or electronic zooming
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
- G02B7/102—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens controlled by a microcomputer
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0046—Movement of one or more optical elements for zooming
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Lens Barrels (AREA)
- Studio Devices (AREA)
- Optics & Photonics (AREA)
Abstract
Description
なお本明細書内ではズーム位置とは、必ずしもズームレンズの光軸方向における物理的な位置を直接示すものでなくてもよい。例えば、ズーム駆動するためにカム機構を使用する場合のカム部材の変位位置を示す値であってもよいし、円筒カムでズーム駆動する場合には円筒カムの回転角に相当する値を指すものであってもよい。すなわち、ズーミングのために構成された可動レンズ、該可動レンズを駆動するためのカム等の駆動機構で構成される変倍手段の中で、可動レンズの位置に対して一意に確定する構成要素の位置(変倍手段の位置)であれば、実施例で例示したズームレンズ位置として本発明が適用できる。
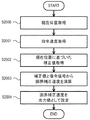
K=(Spdmax−Ctl)/(Ctlmax−Ctl) ・・・(1)
ここで、Spdmaxは、ステップS603で取得するズームレンズ1101の最高速度、CtlはステップS600で取得する操作装置1200からの指令速度、CtlmaxはステップS602で取得する最大画界補正速度である。
Ctladj=(Ctlang−Ctl)×K+Ctl ・・・(2)
ここで、Ctlangは、ステップS601で取得する画界補正速度である。
K=(Spdmin−Ctl)/(Ctlmin−Ctl) ・・・(3)
1101 ズームレンズ(光学部材)
1102 アクチュエータ(駆動手段)
1108 画界変化率補正部(制御手段)
1109 速度補正部(制御手段)
1110 補正値記憶部(記憶手段)
1200 操作装置(入力手段)
Claims (9)
- 変倍のために駆動される変倍手段と、
前記変倍手段を駆動する駆動手段と、
前記変倍手段の速度指令を入力する入力手段と、
前記変倍手段の可動範囲の全域において、前記入力手段により入力された速度指令により前記変倍手段を駆動する場合よりも画界変化率が一定に近づき、かつ、所定の条件を満たす速度指令を導出する制御手段と、
を有することを特徴とするレンズ装置。 - 前記変倍手段の位置と画界との関係に基づく補正情報を記憶する記憶手段を有し、
前記制御手段は、前記入力された速度指令と前記補正情報に基づき、前記所定の条件を満たす速度指令を導出する、
ことを特徴とする請求項1に記載のレンズ装置。 - 前記補正情報は、前記変倍手段の位置に対する画界の変化率との関係である、ことを特徴とする請求項2に記載のレンズ装置。
- 前記制御手段は、
前記入力された速度指令と前記補正情報に基づき、前記可動範囲の全域における画界変化率を一定に近づける、前記変倍手段の位置に対する第1の速度指令を演算し、
前記第1の速度指令が前記可動範囲の全域において所定の条件を満たす場合は、前記第1の速度指令を前記所定の条件を満たす速度指令とし、
前記第1の速度指令が所定の条件を満たさない前記変倍手段の位置がある場合は、前記入力された速度指令と前記補正情報に基づき、前記可動範囲の全域における画界変化率を一定に近づけるような第2の速度指令であって、前記可動範囲の全域において所定の条件を満たし、かつ、前記第1の速度指令で前記可動範囲の全域を駆動した場合の駆動時間と同じ駆動時間となるような第2の速度指令を導出し、該第2の速度指令を前記所定の条件を満たす速度指令とする、
ことを特徴とする請求項2又は3に記載のレンズ装置。 - 前記所定の条件は前記変倍手段の駆動可能な最高速度以下であることを特徴とする請求項1乃至4のいずれか1項に記載のレンズ装置。
- 前記所定の条件は前記変倍手段の最低速度以上であることを特徴とする請求項1乃至4のいずれか1項に記載のレンズ装置。
- 前記変倍手段の駆動速度の条件値を設定する設定手段と、
前記所定の条件は前記設定手段で設定された前記条件値の範囲内である、
ことを特徴とする請求項1乃至4のいずれか1項に記載のレンズ装置。 - 前記設定手段で設定された前記条件値を記憶する条件記憶手段を有することを特徴とする請求項7に記載のレンズ装置。
- 請求項1乃至8のいずれか1項に記載のレンズ装置と、前記レンズ装置によって形成される光学像を撮像する撮像素子と、前記レンズ装置の駆動を操作する操作装置を備える、ことを特徴とする撮影システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015081282A JP6553928B2 (ja) | 2015-04-10 | 2015-04-10 | レンズ装置及びそれを有する撮影システム |
| US15/093,076 US10382697B2 (en) | 2015-04-10 | 2016-04-07 | Lens apparatus and image pickup system having the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015081282A JP6553928B2 (ja) | 2015-04-10 | 2015-04-10 | レンズ装置及びそれを有する撮影システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016200737A true JP2016200737A (ja) | 2016-12-01 |
| JP2016200737A5 JP2016200737A5 (ja) | 2018-05-31 |
| JP6553928B2 JP6553928B2 (ja) | 2019-07-31 |
Family
ID=57111327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015081282A Expired - Fee Related JP6553928B2 (ja) | 2015-04-10 | 2015-04-10 | レンズ装置及びそれを有する撮影システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10382697B2 (ja) |
| JP (1) | JP6553928B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6598490B2 (ja) * | 2015-04-10 | 2019-10-30 | キヤノン株式会社 | レンズ装置およびそれを有する撮像装置 |
| JP7154974B2 (ja) * | 2018-11-28 | 2022-10-18 | キヤノン株式会社 | 操作装置、レンズ装置、および撮像装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02125216A (ja) * | 1988-11-02 | 1990-05-14 | Nikon Corp | カメラのズームレンズ装置 |
| JP2006196965A (ja) * | 2005-01-11 | 2006-07-27 | Canon Inc | 光学機器 |
| JP2012022123A (ja) * | 2010-07-14 | 2012-02-02 | Nikon Corp | 交換レンズおよび撮像装置 |
| JP2012042554A (ja) * | 2010-08-16 | 2012-03-01 | Canon Inc | レンズ制御装置 |
| JP2014154905A (ja) * | 2013-02-05 | 2014-08-25 | Canon Inc | 撮像装置、遠隔操作端末、カメラシステム、撮像装置の制御方法およびプログラム、遠隔操作端末の制御方法およびプログラム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5905530A (en) * | 1992-08-24 | 1999-05-18 | Canon Kabushiki Kaisha | Image pickup apparatus |
| JPH11211962A (ja) | 1998-01-22 | 1999-08-06 | Canon Inc | テレビレンズ |
| JP6598490B2 (ja) * | 2015-04-10 | 2019-10-30 | キヤノン株式会社 | レンズ装置およびそれを有する撮像装置 |
-
2015
- 2015-04-10 JP JP2015081282A patent/JP6553928B2/ja not_active Expired - Fee Related
-
2016
- 2016-04-07 US US15/093,076 patent/US10382697B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02125216A (ja) * | 1988-11-02 | 1990-05-14 | Nikon Corp | カメラのズームレンズ装置 |
| JP2006196965A (ja) * | 2005-01-11 | 2006-07-27 | Canon Inc | 光学機器 |
| JP2012022123A (ja) * | 2010-07-14 | 2012-02-02 | Nikon Corp | 交換レンズおよび撮像装置 |
| JP2012042554A (ja) * | 2010-08-16 | 2012-03-01 | Canon Inc | レンズ制御装置 |
| JP2014154905A (ja) * | 2013-02-05 | 2014-08-25 | Canon Inc | 撮像装置、遠隔操作端末、カメラシステム、撮像装置の制御方法およびプログラム、遠隔操作端末の制御方法およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US10382697B2 (en) | 2019-08-13 |
| JP6553928B2 (ja) | 2019-07-31 |
| US20160299314A1 (en) | 2016-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5328384B2 (ja) | レンズ制御装置、光学機器及びレンズ制御方法 | |
| JP6366230B2 (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP3610167B2 (ja) | レンズ制御方法及び装置 | |
| JP2013130827A (ja) | レンズ制御装置 | |
| US8526805B2 (en) | Lens apparatus and camera system including the same | |
| JP6553928B2 (ja) | レンズ装置及びそれを有する撮影システム | |
| JP2009075221A (ja) | 手振れ補正制御装置、及びそれを備えたカメラボディ、交換レンズ | |
| US5742435A (en) | Video-camera imaging-system zoom lens barrel | |
| JP2017181979A (ja) | レンズ制御装置、制御方法 | |
| JP2013231820A (ja) | レンズ装置及びそれを有する撮像装置 | |
| JP6468707B2 (ja) | 撮像装置及びその制御方法 | |
| JP2017009961A (ja) | 光学機器およびフォーカス制御プログラム | |
| JP2021067704A (ja) | 撮像装置 | |
| JP2021047296A (ja) | レンズ装置、撮像装置、レンズ装置の制御方法、およびプログラム | |
| JP2021067710A (ja) | レンズ制御装置、光学機器およびレンズ制御方法 | |
| JP4721394B2 (ja) | レンズ制御装置、光学機器およびレンズ制御方法 | |
| JP7404059B2 (ja) | 制御装置、レンズ装置、撮像装置、および撮像システム | |
| JP7427414B2 (ja) | 制御装置、レンズ装置、撮像装置、制御方法、プログラム | |
| US8532477B2 (en) | Lens control device having lens position control function for bringing, method of controlling the same, and storage medium | |
| US11829000B2 (en) | Optical apparatus, its control method, and storage medium | |
| JP4721395B2 (ja) | レンズ制御装置、光学機器およびレンズ制御方法 | |
| JPH02144509A (ja) | レンズ位置制御装置 | |
| JP7175677B2 (ja) | 光学機器 | |
| US10209481B2 (en) | Lens apparatus and image pickup apparatus having lens apparatus | |
| US20200007776A1 (en) | Lens apparatus and image pickup apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20171214 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180410 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180410 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190606 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190705 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6553928 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |