JP2015106969A - 半導体モジュール、および、これを用いた駆動装置 - Google Patents
半導体モジュール、および、これを用いた駆動装置 Download PDFInfo
- Publication number
- JP2015106969A JP2015106969A JP2013247468A JP2013247468A JP2015106969A JP 2015106969 A JP2015106969 A JP 2015106969A JP 2013247468 A JP2013247468 A JP 2013247468A JP 2013247468 A JP2013247468 A JP 2013247468A JP 2015106969 A JP2015106969 A JP 2015106969A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- semiconductor module
- notch
- insertion hole
- wire
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L23/00—Details of semiconductor or other solid state devices
- H01L23/48—Arrangements for conducting electric current to or from the solid state body in operation, e.g. leads, terminal arrangements ; Selection of materials therefor
- H01L23/488—Arrangements for conducting electric current to or from the solid state body in operation, e.g. leads, terminal arrangements ; Selection of materials therefor consisting of soldered or bonded constructions
- H01L23/495—Lead-frames or other flat leads
- H01L23/49541—Geometry of the lead-frame
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/50—Fastening of winding heads, equalising connectors, or connections thereto
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L23/00—Details of semiconductor or other solid state devices
- H01L23/34—Arrangements for cooling, heating, ventilating or temperature compensation ; Temperature sensing arrangements
- H01L23/40—Mountings or securing means for detachable cooling or heating arrangements ; fixed by friction, plugs or springs
- H01L23/4006—Mountings or securing means for detachable cooling or heating arrangements ; fixed by friction, plugs or springs with bolts or screws
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L23/00—Details of semiconductor or other solid state devices
- H01L23/48—Arrangements for conducting electric current to or from the solid state body in operation, e.g. leads, terminal arrangements ; Selection of materials therefor
- H01L23/488—Arrangements for conducting electric current to or from the solid state body in operation, e.g. leads, terminal arrangements ; Selection of materials therefor consisting of soldered or bonded constructions
- H01L23/495—Lead-frames or other flat leads
- H01L23/49541—Geometry of the lead-frame
- H01L23/49562—Geometry of the lead-frame for individual devices of subclass H10D
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L23/00—Details of semiconductor or other solid state devices
- H01L23/48—Arrangements for conducting electric current to or from the solid state body in operation, e.g. leads, terminal arrangements ; Selection of materials therefor
- H01L23/488—Arrangements for conducting electric current to or from the solid state body in operation, e.g. leads, terminal arrangements ; Selection of materials therefor consisting of soldered or bonded constructions
- H01L23/495—Lead-frames or other flat leads
- H01L23/49575—Assemblies of semiconductor devices on lead frames
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/0001—Technical content checked by a classifier
- H01L2924/0002—Not covered by any one of groups H01L24/00, H01L24/00 and H01L2224/00
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Inverter Devices (AREA)
- Motor Or Generator Frames (AREA)
Abstract
【解決手段】半導体モジュール40は、スイッチング素子41と、モールド部42と、モータ端子51、52、53と、を備える。モールド部42は、スイッチング素子41をモールドする。モータ端子51は、モールド部42から突出して形成される基部61、および、基部61の先端に形成され巻線と接続するモータ線が挿通される挿通孔65が形成される接続部62を有する。接続部62は、挿通孔65の外側にて挿通孔65と連続する空隙部67を構成する切欠部66を有する。モータ10の巻線と半導体モジュール40とは、モータ線とモータ端子51とで接続されるので、コネクタを用いて接続する場合と比較して、部品点数が低減され、小型化可能である。
【選択図】 図2
Description
本発明は、上述の課題に鑑みてなされたものであり、その目的は、他の部品を用いずにモータ線と半導体モジュールとを接続可能な半導体モジュール、および、これを用いた駆動装置を提供することにある。
接続部は、挿通孔の外側にて挿通孔と連続する空隙部を構成する切欠部を有する。
また、モータ端子の先端を例えば溶融はんだ浴等のコーティング材に浸漬するディップ処理を行う場合、モータ端子をコーティング材から引き上げる際、空隙部にて挿通孔内部における表面張力を断つことができる。これにより、挿通孔の大きさが小さい場合あっても、コーティング材が挿通孔内に残る不良の発生を低減することができる。
(第1実施形態)
図1に示すように、本発明の第1実施形態による半導体モジュール40は、駆動装置1に適用される。駆動装置1は、例えば車両の電動パワーステアリング装置に用いられる。駆動装置1は、モータ10と、コントロールユニット30と、を備える。本実施形態の駆動装置1は、コントロールユニット30がモータ10の軸方向の一側に一体に設けられる機電一体型の駆動装置である。
モータケース11は、例えば鉄等の軟磁性材により、略円筒状に形成される。
ステータ12は、モータケース11の内側に固定されるステータコアに巻線121が巻回されている。巻線121は、U相コイル、V相コイルおよびW相コイルからなる3相巻線を構成している。本実施形態では、巻線121は、2組の3相巻線を構成している。巻線121からは、モータ線13がコントロールユニット30側に取り出され、半導体モジュール40と接続される。
ロータ14は、ステータ12と略同軸となるように、ステータ12の径方向内側に回転可能に設けられる。ロータ14は、略円筒状に形成され、外周面には、N極とS極とが交互になるように永久磁石が貼り付けられる。
軸受16、17は、ボールベアリングである。軸受16は、第1フレーム21に固定される。また、軸受17は、モータケース11のコントロールユニット30側に形成される軸受保持部111に固定される。
シャフト15のコントロールユニット30と反対側の端部には、ジョイント19が設けられる。ジョイント19は、図示しないギア等に噛み合うことにより、ロータ14およびシャフト15の回転を外部へ出力する。シャフト15のコントロールユニット30側の端部には、図示しないマグネットが設けられる。
第2フレーム22は、略円板状に形成され、モータケース11のコントロールユニット30側に設けられる。
制御基板31は、ヒートシンク35のモータ10側に固定される。制御基板31には、マイコンやホールIC等の比較的通電量の小さい制御系の電子部品が実装される。また、制御基板31のシャフト15に設けられるマグネットと対向する箇所には、ロータ14およびシャフト15の回転を検出するための回転角センサが設けられる。
ヒートシンク35は、アルミ等の熱伝導性のよい素材で形成され、制御基板31、パワー基板32、および、半導体モジュール40等が固定された状態にて、第2フレーム22にねじ等により固定される。
スイッチング素子41は、巻線121の各相への通電を切り替える。1つのインバータを構成する6つのスイッチング素子41は、銅板等の電気伝導性のよい材料で形成される図示しないリードフレームに実装される。
モールド部42は、1つのインバータを構成する6つのスイッチング素子41を一体にモールドする。モールド部42には、半導体モジュール40をヒートシンク35に固定するためのねじを挿通するためのねじ穴43が形成される。
本実施形態のモータ10は、2組のインバータにより駆動が制御されるため、図1に示すように、2つの半導体モジュール40がヒートシンク35を挟んで両側に配置される。モールド部42とヒートシンク35との間には、図示しない放熱シートが設けられ、ねじ等により半導体モジュール40がヒートシンク35に固定される。
モータ端子51とモータ端子52、53とは、左右反転されている点を除いて同様であるので、以下、モータ端子51を中心に説明する。
基部61は、モールド部42から突出して形成される。
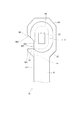
基部61の先端に形成される接続部62は、略環状に形成され、内周壁63および外周壁64を有する。内周壁63の内側には、モータ線13が挿通される挿通孔65が形成される。挿通孔65は、内周壁63および内周壁63を延長した仮想面P1により規定される空間とする。本実施形態の挿通孔65は、略長円形状に形成される。
切欠部66を設けることにより、空隙部67が形成される。空隙部67は、基部側切欠面661、先端側切欠面662、内周壁63を延長した仮想面P1、および、外周壁64を延長した仮想面P2により規定される空間とし、挿通孔65と連続するように形成される。
なお、基部側切欠面661と先端側切欠面662との最短距離をギャップ距離Gとし、当該ギャップ距離が、モータ線13の短辺あるいは直径より小さくなるように形成すれば、空隙部67からのモータ線13の抜けを防ぐことができる。
また、モータ端子51の先端を溶融はんだ浴等のコーティング材に浸漬するディップ処理を行う場合、モータ端子51を溶融はんだ浴Bから引き上げる際、空隙部67にて挿通孔65内部における表面張力を断つことができる。これにより、挿通孔65の大きさが小さい場合であっても、はんだが挿通孔65内に残る不良の発生を低減することができる。また、はんだディップ処理により、接続部62の酸化が防止されるので、保存性が向上する。
また、空隙部67のギャップ距離Gは、モータ線13が丸線である場合、モータ線13の断面の直径Rより小さい。
これにより、モータ線13が空隙部67から抜けないので、組み付け性が向上する。
はんだ部69は、外縁がモータ端子51の形状に応じて規定される最低充填ラインよりも外側となるように充填される。本実施形態の最低充填ラインは、基部61の側壁611を延長した仮想線Leとする。これにより、モータ線13とモータ端子51とを確実に接続できるとともに、はんだ部69による接続状態を工程内にて確実に良否判定することができる。
これにより、装置全体を小型化することができる。また、例えばモータ10の外郭を構成するモータケース11とヒートシンク35とが線膨張率が異なる材料で形成されていると、モータ線13とモータ端子51との接続箇所には応力が加わる。本実施形態では、応力方向線からずれた箇所に空隙部67を形成しているので、冷熱ストレスによる接続不良の発生を抑制することができる。
本発明の第2実施形態による半導体モジュールを図10および図11に示す。図10および図11は、第1実施形態の図9と対応する図である。
本実施形態の半導体モジュール48は、3つのモータ端子54、55、56を有する。モータ端子54、55、56は、基部61の長さ、および、空隙部67のギャップ距離が異なる以外は、第1実施形態と同様である。基部61の長さが異なっているので、モータ端子54、55、56は、モータ端子全体としての長さが異なっている。また、図11は、モータ端子54が反転されている点以外は、図10と同様である。
モータ端子54、55、56を溶融はんだ浴B(図6参照)に浸漬し、モールド部42を略水平に引き上げるとすると、モータ端子56、55、54の順に接続部62が溶融はんだ浴Bから取り出されることになる。すなわち、モータ端子が長い程、溶融はんだ浴Bに浸漬される時間が長く、溶融はんだ浴Bから取り出されるのが遅くなる。そこで本実施形態では、空隙部67のギャップ距離をG1>G2>G3としている。すなわち、溶融はんだ浴Bにより長く浸漬されるモータ端子の空隙部のギャップ距離を大きく形成することにより、表面張力を断ちやすくしている。
これにより、モータ端子54、55、56の長さの違いによる溶融はんだ浴Bからの引き上げタイミングの違いに応じ、表面張力を適切に断つことができる。
また、上記実施形態と同様の効果を奏する。
本発明の第3実施形態〜第5実施形態は、切欠部の形状が異なっているので、この点を中心に説明する。
図12に示すように、本発明の第3実施形態によるモータ端子57の切欠部571は、第1切欠面としての基部側切欠面572および第2切欠面としての先端側切欠面573を有し、空隙部575を形成する。空隙部575は、接続部62の幅方向の一側に形成される。本実施形態の先端側切欠面573は、基部側切欠面572と略平行に形成される。先端側切欠面573と基部側切欠面572とを略平行に形成することにより、先端側切欠面573を傾斜して形成する場合と比較し、モータ端子57とはんだ部69との接続性が向上する。
また、上記実施形態と同様の効果を奏する。
図13に示すように、本発明の第4実施形態によるモータ端子58の切欠部581は、接続部62の先端に形成され、空隙部585を形成する。切欠部581を構成する切欠面582、583は、略平行に形成される。本実施形態では、切欠面582、583が「第1切欠面」および「第2切欠面」に対応する。
また、上記実施形態と同様の効果を奏する。
図14に示すように、本発明の第5実施形態によるモータ端子59の切欠部591は、接続部62の基部61側に形成され、空隙部595を形成する。切欠部591を構成する切欠面592、593は、略平行に形成される。本実施形態の空隙部595は、切欠面592、593、切欠部591の底面594、および、内周壁63および内周壁63を延長した仮想面P1により規定される空間とする。本実施形態では、切欠面592、593が「第1切欠面」および「第2切欠面」に対応する。
また、上記実施形態と同様の効果を奏する。
(ア)上記実施形態では、半導体モジュールに3つのモータ端子が設けられる。他の実施形態では、半導体モジュールに設けられるモータ端子の数は、3つに限らず、いくつであってもよい。また、モータ端子の基部および接続部の形状は、接続部に空隙部が形成されていれば、どのような形状としてもよく、例えば図11に示すモータ端子54のように、空隙部を幅方向の一側であって、半導体モジュールにおける内側となるように形成してもよい。また、1つの半導体モジュールに、異なる形状のモータ端子を設けるようにしてもよい。
(ウ)上記実施形態の半導体モジュールは、6つのスイッチング素子が一体にモールドされる。他の実施形態では、スイッチング素子の数は6つに限らず、いくつであってもよい。また、スイッチング素子に加え、電源リレーやモータリレー等の各種リレーや、シャント抵抗等、他の電子部品を一体にモールドしてもよい。
以上、本発明は、上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない範囲において種々の形態で実施可能である。
10・・・モータ
13・・・モータ線
40、48・・・半導体モジュール
42・・・モールド部
51〜59・・・モータ端子
62・・・接続部
65・・・挿通孔
66、571、581、591・・・切欠部
67、575、585、595・・・空隙部
Claims (8)
- モータ(10)の巻線(121)に通電される電流を切り替えるスイッチング素子(41)と、
前記スイッチング素子をモールドするモールド部(42)と、
前記モールド部から突出して形成される基部(61)、および、前記基部の先端側に形成され前記巻線と接続するモータ線(13)が挿通される挿通孔(65)が形成される接続部(62)を有するモータ端子(51〜59)と、
を備え、
前記接続部は、前記挿通孔の外側にて前記挿通孔と連続する空隙部(67、575、585、595)を構成する切欠部(66、571、581、591)を有することを特徴とする半導体モジュール(40、48)。 - 前記切欠部は、前記モータ線と前記モータ端子との接続箇所に応力が加わる方向である応力方向線からずれた箇所に形成されることを特徴とする請求項1に記載の半導体モジュール。
- 前記切欠部は、前記基部側の面である第1切欠面(661、572)、および、先端側の面である第2切欠面(662、573)を有し、
前記第2切欠面の前記挿通孔側の端部(663)は、前記挿通孔の中心よりも前記基部側に形成されることを特徴とする請求項1または2に記載の半導体モジュール。 - 前記切欠部のギャップ距離は、前記モータ線が角線である場合、前記モータ線の断面の短辺の長さより小さいことを特徴とする請求項1〜3のいずれか一項に記載の半導体モジュール。
- 前記切欠部のギャップ距離は、前記モータ線が丸線である場合、前記モータ線の断面の直径より小さいことを特徴とする請求項1〜3のいずれか一項に記載の半導体モジュール。
- 前記モータ端子(54、55、56)は、複数であり、
第1の長さの前記モータ端子に形成される前記切欠部のギャップ距離は、前記第1の長さより短い第2の長さの前記モータ端子に形成される前記切欠部のギャップ距離より大きく形成されることを特徴とする請求項1〜5のいずれか一項に記載の半導体モジュール(48)。 - 前記モータ端子は、前記モータ線が前記挿通孔に挿通された状態にて充填部材(69)が充填されることにより、前記モータ線と電気的に接続され、
前記充填部材は、外縁が前記モータ端子の形状に応じて規定される最低充填ラインよりも外側となるように充填されることを特徴とする請求項1〜6のいずれか一項に記載の半導体モジュール。 - 前記モータと、
請求項1〜7のいずれか一項に記載の半導体モジュール、および、前記半導体モジュールが固定されるヒートシンク(35)を有し、前記モータの軸方向の一側に配置されるコントロールユニット(30)と、
を備えることを特徴とする駆動装置(1)。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013247468A JP5999075B2 (ja) | 2013-11-29 | 2013-11-29 | 半導体モジュール、および、これを用いた駆動装置 |
| US14/553,025 US9543810B2 (en) | 2013-11-29 | 2014-11-25 | Semiconductor module and driver device |
| CN201410710764.XA CN104682782B (zh) | 2013-11-29 | 2014-11-28 | 半导体模块及驱动器装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013247468A JP5999075B2 (ja) | 2013-11-29 | 2013-11-29 | 半導体モジュール、および、これを用いた駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015106969A true JP2015106969A (ja) | 2015-06-08 |
| JP5999075B2 JP5999075B2 (ja) | 2016-09-28 |
Family
ID=53266135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013247468A Active JP5999075B2 (ja) | 2013-11-29 | 2013-11-29 | 半導体モジュール、および、これを用いた駆動装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9543810B2 (ja) |
| JP (1) | JP5999075B2 (ja) |
| CN (1) | CN104682782B (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021044908A (ja) * | 2019-09-10 | 2021-03-18 | ミネベアミツミ株式会社 | モータのステータ構造、モータ及び移動体 |
| KR102828426B1 (ko) * | 2023-05-03 | 2025-07-02 | 주식회사 코아비스 | 워셔 펌프 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02120711U (ja) * | 1989-03-16 | 1990-09-28 | ||
| JPH05308754A (ja) * | 1992-04-28 | 1993-11-19 | Matsushita Electric Ind Co Ltd | 小型直流モータ |
| JP2002136019A (ja) * | 2000-10-18 | 2002-05-10 | Mitsubishi Electric Corp | 車両用交流発電機およびその固定子巻線に適用される導体線の接続係止部形成方法 |
| JP2011030407A (ja) * | 2009-06-24 | 2011-02-10 | Denso Corp | 半導体モジュール及びそれを用いた電子回路内蔵型モータ |
| JP2011177001A (ja) * | 2009-06-24 | 2011-09-08 | Denso Corp | 駆動装置 |
| JP2012029448A (ja) * | 2010-07-22 | 2012-02-09 | Keihin Corp | 回転電機 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02120711A (ja) * | 1988-10-28 | 1990-05-08 | Nikon Corp | 測光測距装置 |
| JP5725343B2 (ja) | 2011-05-11 | 2015-05-27 | 株式会社デンソー | 駆動装置 |
| DE102012104076A1 (de) | 2011-05-13 | 2012-11-15 | Denso Corp. | Drehmomentsensor |
-
2013
- 2013-11-29 JP JP2013247468A patent/JP5999075B2/ja active Active
-
2014
- 2014-11-25 US US14/553,025 patent/US9543810B2/en active Active
- 2014-11-28 CN CN201410710764.XA patent/CN104682782B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02120711U (ja) * | 1989-03-16 | 1990-09-28 | ||
| JPH05308754A (ja) * | 1992-04-28 | 1993-11-19 | Matsushita Electric Ind Co Ltd | 小型直流モータ |
| JP2002136019A (ja) * | 2000-10-18 | 2002-05-10 | Mitsubishi Electric Corp | 車両用交流発電機およびその固定子巻線に適用される導体線の接続係止部形成方法 |
| JP2011030407A (ja) * | 2009-06-24 | 2011-02-10 | Denso Corp | 半導体モジュール及びそれを用いた電子回路内蔵型モータ |
| JP2011177001A (ja) * | 2009-06-24 | 2011-09-08 | Denso Corp | 駆動装置 |
| JP2012029448A (ja) * | 2010-07-22 | 2012-02-09 | Keihin Corp | 回転電機 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9543810B2 (en) | 2017-01-10 |
| CN104682782B (zh) | 2019-04-30 |
| CN104682782A (zh) | 2015-06-03 |
| JP5999075B2 (ja) | 2016-09-28 |
| US20150155762A1 (en) | 2015-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5935788B2 (ja) | 駆動装置 | |
| JP5333996B2 (ja) | 固定子およびこれを用いた回転電機 | |
| JP4743167B2 (ja) | 回転電機用端末モジュールおよび回転電機 | |
| US9929614B2 (en) | Motor with integrated slot liner and bobbin with guides for conductor coils | |
| US10256694B2 (en) | Bus bar structure for a motor | |
| JP4688910B2 (ja) | 電動パワーステアリング装置用モータ | |
| JP5720958B2 (ja) | 回転電機駆動システム | |
| CN101292413B (zh) | 线性电动机及其制造方法 | |
| JP6168156B2 (ja) | バスバーユニットおよびモータ | |
| JP2002171708A (ja) | 回転電機 | |
| JP7431076B2 (ja) | モータ | |
| JP5999075B2 (ja) | 半導体モジュール、および、これを用いた駆動装置 | |
| CN104079099A (zh) | 电动机 | |
| JP2011151875A (ja) | 同期回転機の固定子 | |
| JP6373746B2 (ja) | モータ、及びこれを備えた機電一体型モータ | |
| WO2020000698A1 (zh) | 电机的转子结构及电机 | |
| JP2019103354A (ja) | 回転電機 | |
| JP4913538B2 (ja) | 集中配電部品 | |
| JP2000014069A (ja) | モータ | |
| JP2007006637A (ja) | リニアモータ | |
| CN111342618B (zh) | 定子单元、马达以及定子单元的制造方法 | |
| JP2022117165A (ja) | ステータ、モータ、及び、ステータの製造方法 | |
| US20080191566A1 (en) | Motor and stator structure thereof | |
| JP2007020270A (ja) | リニアモータ | |
| JPH05122886A (ja) | 磁気デイスク駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150427 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160315 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160506 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160802 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160815 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5999075 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |