JP2015019231A - 撮像装置及び像振れ補正処理方法 - Google Patents
撮像装置及び像振れ補正処理方法 Download PDFInfo
- Publication number
- JP2015019231A JP2015019231A JP2013144854A JP2013144854A JP2015019231A JP 2015019231 A JP2015019231 A JP 2015019231A JP 2013144854 A JP2013144854 A JP 2013144854A JP 2013144854 A JP2013144854 A JP 2013144854A JP 2015019231 A JP2015019231 A JP 2015019231A
- Authority
- JP
- Japan
- Prior art keywords
- image
- motion
- image blur
- imaging device
- blur correction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Abstract
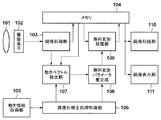
【解決手段】 像振れ補正処理を行う撮像装置であって、被写体像を撮像して画像を出力する撮像素子(102)と、撮像装置の動き情報を取得する動き情報取得部(105)と、撮像素子により撮像された画像の検出領域から動きベクトルを検出する動きベクトル検出部(107)と、動き情報取得部により取得した動き情報に応じて、前記検出領域及び前記画像の像振れを補正するための像振れ補正方法を決定する像振れ補正処理制御部(106)と、動きベクトル検出部により検出された動きベクトルに基づいて、像振れ補正処理制御部により決定された像振れ補正方法を用いて前記画像の像振れを補正する像振れ補正手段(108、109)とを有する。
【選択図】 図1
Description
図1は、本発明の第1の実施形態における撮像装置の構成を示すブロック図である。同図において、光学系101は被写体像を形成し、CCDセンサやCMOSセンサ等から構成される撮像素子102により光学系101が形成した被写体像を光電変換する。現像処理部103は不図示のA/D変換部、オートゲイン制御部(AGC)、オートホワイトバランス部を含み、撮像素子102から出力される電気信号からデジタルの映像信号を形成する。撮像素子102及び現像処理部103により、画像の取得を行う撮像系が構成される。メモリ104は、現像処理部103により形成された、1フレームまたは複数フレーム分の画像の映像信号を一時的に記憶保持する。

a = [x, y, 1]T …(2)
が次フレームにおいて点a′、
a' = [x', y', 1]T …(3)
に移動したとする。ここで、添え字Tは転置行列であること示す。
a' = Ha …(4)
と表すことができる。
a = H-1a' …(6)
と表すことができる。式(6)により、像振れが生じた後の点a’を、像振れが生じる前の点aと同じ座標に戻すことが可能となる。
次に、本発明の第2の実施形態について説明する。図5は、第2の実施形態における撮像装置の構成を示すブロック図である。本第2の実施形態では、入力画像上に存在する特定の領域を避けて動きベクトル検出領域を設定することで、より良好な像振れ補正映像を生成する。なお、図5に示す本第2の実施形態の撮像装置は、図1に示した構成に加えて、領域判定部501を更に有する。それ以外は図1に示した構成要素と同じであるので、図1と同符号を付して説明を省略する。
Claims (11)
- 像振れ補正処理を行う撮像装置であって、
被写体像を撮像して画像を出力する撮像手段と、
前記撮像装置の動き情報を取得する動き情報取得手段と、
前記撮像手段により撮像された画像の検出領域から動きベクトルを検出するベクトル検出手段と、
前記動き情報取得手段により取得した動き情報に応じて、前記検出領域及び前記画像の像振れを補正するための像振れ補正方法を決定する制御手段と、
前記ベクトル検出手段により検出された動きベクトルに基づいて、前記制御手段により決定された像振れ補正方法を用いて前記画像の像振れを補正する像振れ補正手段と
を有することを特徴とする撮像装置。 - 前記制御手段は、前記動き情報取得手段により取得した動き情報から、前記撮像装置の動きが並進であるかどうかを判断し、前記並進である場合に前記並進でない場合よりも狭い検出領域を決定し、前記並進でない場合に前記並進の場合よりもより広い検出領域を決定することを特徴とする請求項1に記載の撮像装置。
- 前記制御手段は、前記像振れ補正方法として、前記撮像装置の動きが並進である場合に、並進でない場合よりも演算量の少ない像振れ補正方法を選択することを特徴とする請求項2に記載の撮像装置。
- 前記制御手段は、前記動き情報取得手段により取得した動き情報から、更に前記撮像装置の動きが、あおり及び回転の少なくともいずれかを含むかどうかを判断し、前記あおりを含むの場合に前記あおりを含まない場合よりも広い検出領域を決定し、前記あおりを含まない場合であって前記回転を含む場合に前記並進である場合よりも広い検出領域を決定することを特徴とする請求項2または3に記載の撮像装置。
- 前記制御手段は、前記像振れ補正方法として、前記撮像装置の動きが前記あおり含まない場合に含む場合よりも演算量の少ない像振れ補正方法を選択し、前記あおりを含まない場合であって前記回転を含む場合に前記並進である場合よりも演算量の多い像振れ補正方法を選択することを特徴とする請求項4に記載の撮像装置。
- 前記制御手段は、前記像振れ補正方法として、前記撮像装置の動きが前記あおりを含む場合に8自由度の最小二乗法とし、前記あおりを含まず前記回転を含む場合に6自由度の最小二乗法とし、前記並進の場合にヒストグラムを利用した処理とすることを特徴とする請求項4に記載の撮像装置。
- 前記動き情報取得手段は、前記撮像装置の動き情報として、前記撮像装置の光軸に直交する軸回り方向の回転の動き量と光軸回り方向の回転の動き量を取得し、
前記制御手段は、前記撮像装置の光軸に直交する軸回り方向の回転の動き量と光軸回り方向の回転の動き量の大きさに応じて、前記撮像装置の動きを決定することを特徴とする請求項2乃至6のいずれか1項に記載の撮像装置。 - 前記動き情報取得手段は、前記撮像装置の動き情報として、前記撮像装置の光軸に直交する軸回り方向の動き量と光軸回り方向の回転の動き量を取得し、
前記制御手段は、
前記撮像装置の光軸に直交する軸回り方向の回転の動き量が閾値よりも小さく、前記光軸回り方向の回転の動き量が閾値よりも小さい場合に、前記撮像装置の動きが並進と判断し、
前記撮像装置の光軸回り方向の回転の動き量が閾値よりも小さく、前記撮像装置の光軸に直交する軸回り方向の回転の動き量が閾値以上の場合に、前記撮像装置の動きが回転と判断し、
前記撮像装置の光軸に直交する軸回り方向の回転の動き量が閾値以上である場合に、前記撮像装置の光軸回り方向の回転の動き量に関わらず、前記撮像装置の動きをあおりと判断する
ことを特徴とする請求項4乃至6のいずれか1項に記載の撮像装置。 - 前記撮像手段によって撮像された画像において、前記撮像装置の振れを表す動きベクトルを検出することが困難である、予め決められた条件を満たす除外領域を検出する領域判定手段を更に有し、
前記制御手段は、前記除外領域を前記検出領域に含めないことを特徴とする請求項1乃至8のいずれか1項に記載の撮像装置。 - 前記除外領域は、移動物体が存在している領域、低コントラスト領域、繰り返しのテクスチャを有する領域、人物の顔が存在する領域の少なくともいずれかを含むことを特徴とする請求項9に記載の撮像装置。
- 撮像装置における像振れ補正処理方法であって、
撮像手段が、被写体像を撮像して画像を出力する撮像工程と、
動き情報取得手段が、前記撮像装置の動き情報を取得する動き情報取得工程と、
制御手段が、前記動き情報取得工程で取得した動き情報に応じて、動きベクトルを検出する前記画像における検出領域を決定する決定工程と、
ベクトル検出手段が、前記撮像工程で撮像された画像の前記検出領域から、動きベクトルを検出するベクトル検出工程と、
前記制御手段が、前記画像の像振れを補正するための像振れ補正方法を決定する制御工程と、
像振れ補正手段が、前記ベクトル検出工程で検出された動きベクトルに基づいて、前記制御工程で決定された像振れ補正方法を用いて前記画像の像振れを補正する像振れ補正手段と
を有することを特徴とする像振れ補正処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013144854A JP6178646B2 (ja) | 2013-07-10 | 2013-07-10 | 撮像装置及び像振れ補正処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013144854A JP6178646B2 (ja) | 2013-07-10 | 2013-07-10 | 撮像装置及び像振れ補正処理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015019231A true JP2015019231A (ja) | 2015-01-29 |
| JP2015019231A5 JP2015019231A5 (ja) | 2016-08-25 |
| JP6178646B2 JP6178646B2 (ja) | 2017-08-09 |
Family
ID=52439848
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013144854A Expired - Fee Related JP6178646B2 (ja) | 2013-07-10 | 2013-07-10 | 撮像装置及び像振れ補正処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6178646B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016201637A (ja) * | 2015-04-08 | 2016-12-01 | キヤノン株式会社 | 画像処理装置及び画像処理方法 |
| JP2017098884A (ja) * | 2015-11-27 | 2017-06-01 | カシオ計算機株式会社 | 移動検出装置、移動検出方法、及び、プログラム |
| US9674441B2 (en) | 2014-08-05 | 2017-06-06 | Canon Kabushiki Kaisha | Image processing apparatus, image processing method, and storage medium |
| US10560631B2 (en) | 2017-03-24 | 2020-02-11 | Casio Computer Co., Ltd. | Motion vector acquiring device, motion vector acquiring method, and storage medium |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000092499A (ja) * | 1998-09-08 | 2000-03-31 | Canon Inc | 画像符号化制御装置、画像符号化制御方法及び記憶媒体 |
| JP2007166269A (ja) * | 2005-12-14 | 2007-06-28 | Canon Inc | 画像処理装置、撮像装置および画像処理方法 |
-
2013
- 2013-07-10 JP JP2013144854A patent/JP6178646B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000092499A (ja) * | 1998-09-08 | 2000-03-31 | Canon Inc | 画像符号化制御装置、画像符号化制御方法及び記憶媒体 |
| JP2007166269A (ja) * | 2005-12-14 | 2007-06-28 | Canon Inc | 画像処理装置、撮像装置および画像処理方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9674441B2 (en) | 2014-08-05 | 2017-06-06 | Canon Kabushiki Kaisha | Image processing apparatus, image processing method, and storage medium |
| JP2016201637A (ja) * | 2015-04-08 | 2016-12-01 | キヤノン株式会社 | 画像処理装置及び画像処理方法 |
| JP2017098884A (ja) * | 2015-11-27 | 2017-06-01 | カシオ計算機株式会社 | 移動検出装置、移動検出方法、及び、プログラム |
| US10560631B2 (en) | 2017-03-24 | 2020-02-11 | Casio Computer Co., Ltd. | Motion vector acquiring device, motion vector acquiring method, and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6178646B2 (ja) | 2017-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5284048B2 (ja) | 画像処理装置、撮像装置及び画像処理方法 | |
| US8508605B2 (en) | Method and apparatus for image stabilization | |
| JP4755490B2 (ja) | ブレ補正方法および撮像装置 | |
| US9055217B2 (en) | Image compositing apparatus, image compositing method and program recording device | |
| JP4377932B2 (ja) | パノラマ画像生成装置およびプログラム | |
| JP6465563B2 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP2011029735A5 (ja) | ||
| JP6656035B2 (ja) | 画像処理装置、撮像装置および画像処理装置の制御方法 | |
| JP6178646B2 (ja) | 撮像装置及び像振れ補正処理方法 | |
| JP6282133B2 (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP6231816B2 (ja) | 撮像装置およびその制御方法、プログラム並びに記憶媒体 | |
| JP2008217330A (ja) | 速度推定方法および速度推定プログラム | |
| US9270883B2 (en) | Image processing apparatus, image pickup apparatus, image pickup system, image processing method, and non-transitory computer-readable storage medium | |
| JP2014027580A (ja) | 撮像装置、及び画像処理方法 | |
| JP2009027437A (ja) | 画像処理装置,画像処理方法及び撮像装置 | |
| JP6381212B2 (ja) | 撮像装置及びその制御方法 | |
| JP2016129281A (ja) | 画像処理装置 | |
| JP4760484B2 (ja) | 手振れ補正装置、手振れ補正方法およびプログラム | |
| JP2019176261A (ja) | 画像処理装置 | |
| US10885348B2 (en) | Information processing device, information processing method, and storage medium | |
| JP6525693B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP2011070572A (ja) | 画像処理装置及び画像処理装置用プログラム | |
| JP2018072942A (ja) | 画像処理装置、画像処理方法、プログラム、記憶媒体 | |
| EP2747417B1 (en) | Combined rectification and video stabilisation | |
| JP2021118523A (ja) | 画像処理装置及び画像処理方法、プログラム、記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160708 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160708 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170410 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170605 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170616 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170714 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6178646 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |