JP2014193045A - プロービング装置 - Google Patents
プロービング装置 Download PDFInfo
- Publication number
- JP2014193045A JP2014193045A JP2013067327A JP2013067327A JP2014193045A JP 2014193045 A JP2014193045 A JP 2014193045A JP 2013067327 A JP2013067327 A JP 2013067327A JP 2013067327 A JP2013067327 A JP 2013067327A JP 2014193045 A JP2014193045 A JP 2014193045A
- Authority
- JP
- Japan
- Prior art keywords
- stage
- mover
- axis moving
- moving table
- track
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 41
- 239000000523 sample Substances 0.000 claims description 48
- 230000005484 gravity Effects 0.000 claims description 7
- 239000004065 semiconductor Substances 0.000 abstract description 40
- 235000012431 wafers Nutrition 0.000 description 28
- 238000007689 inspection Methods 0.000 description 17
- 238000005259 measurement Methods 0.000 description 6
- 230000005389 magnetism Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 239000002245 particle Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images



Landscapes
- Linear Motors (AREA)
Abstract
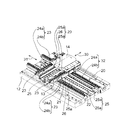
【解決手段】半導体ウエハWを保持するステージ16と、ステージ16を水平方向に移動させる移動機構部22、23と、移動機構部22、23の駆動を制御する制御部17とを備え、移動機構部22、23は、ステージ16と一体的に移動する可動子26と、可動子26の左右両側面26aに各々対向して設けられた左右1対のガイド壁部25aを有する軌道25と、軌道25に沿って設けられた永久磁石列28と永久磁石列28に対向して並設配置されたコイル列29を有し、永久磁石列28とコイル列29の一方を対向し合う可動子26の側面26a側に固定し他方をガイド壁25a側に固定するようにして、それぞれ対向する可動子26の側面26aとガイド壁25aとの間に設けられた1対のリニアモータ27a、27bと、よりなる構成とした。
【選択図】図3
Description
12 ベース台
13 Y軸移動台
14 X軸移動台
15 Z軸移動台
16 ステージ
17 制御部
18 プローブカード
19 プローブ
20、21 移動機構
22、23 移動機構部
24a レール材
24b スライダー
25 軌道
25a ガイド壁(ガイド部)
26 可動子(コア)
26a 側面
27a、27b リニアモータ
28 永久磁石列
29 コイル列
30 X軸方向
31 Y軸方向
32 Z軸方向
W 半導体ウエハ
Claims (4)
- プローブカードのプローブに電子デバイスの電極を上下方向より接触させて検査を行うプロービング装置において、
前記電子デバイスを保持するステージと、前記ステージを水平方向に移動させる移動機構と、前記移動機構の駆動を制御する制御部と、を備え、
前記移動機構は、
前記ステージと一体的に移動する可動子と、
前記可動子の左右両側面に各々対向して設けられた左右1対のガイド部を有する軌道と、
前記軌道に沿って設けられた永久磁石列と該永久磁石列に対向して並設配置されたコイル列を有し、該永久磁石列とコイル列の一方を対向し合う前記可動子の側面側に固定し他方を前記ガイド部側に固定するようにして、それぞれ対向する前記可動子の側面と前記ガイド部との間に設けられた1対のリニアモータと、
よりなり、前記1対のリニアモータが前記可動子を前記軌道に沿って移動させる推力を発生するようにしたことを特徴とするプロービング装置。 - 前記可動子上に前記ステージを設け、重心位置を可動子内に設けてなることを特徴とする請求項1記載のプロービング装置。
- 前記1対のリニアモータは、前記可動子を挟んで略左右対称な位置に配設されていることを特徴とする請求項1または2に記載のプロービング装置。
- 前記移動機構は、前記ステージを上下方向に移動させるZ軸移動台と、前記ステージとZ軸移動台をX方向及びY方向にそれぞれ移動させるX軸移動台及びY軸移動台とを備え、前記可動子と前記軌道と前記1対のリニアモータは、少なくとも前記Z軸移動台と前記X軸移動台または前記Y軸移動台との間に設けられていることを特徴とする請求項1,2又は3に記載のプロービング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013067327A JP2014193045A (ja) | 2013-03-27 | 2013-03-27 | プロービング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013067327A JP2014193045A (ja) | 2013-03-27 | 2013-03-27 | プロービング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014193045A true JP2014193045A (ja) | 2014-10-06 |
Family
ID=51838866
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013067327A Pending JP2014193045A (ja) | 2013-03-27 | 2013-03-27 | プロービング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014193045A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108140602A (zh) * | 2015-09-24 | 2018-06-08 | 东京毅力科创株式会社 | 载置台装置和探针装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002034231A (ja) * | 2000-07-19 | 2002-01-31 | Yaskawa Electric Corp | リニアスライダ |
| JP2002218730A (ja) * | 2001-01-18 | 2002-08-02 | Sodick Co Ltd | コア付きリニアモータ及びその製造方法、並びにその生産に使用する冷却部材及びその製作方法 |
| JP2003189678A (ja) * | 2001-12-18 | 2003-07-04 | Juki Corp | リニアモータ保護装置、および、電子部品搭載装置 |
| JP2004342638A (ja) * | 2003-05-13 | 2004-12-02 | Nikon Corp | ステージ装置及び露光装置 |
| JP2008117897A (ja) * | 2006-11-02 | 2008-05-22 | Tokyo Seimitsu Co Ltd | プローバ及びプロービング検査方法 |
-
2013
- 2013-03-27 JP JP2013067327A patent/JP2014193045A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002034231A (ja) * | 2000-07-19 | 2002-01-31 | Yaskawa Electric Corp | リニアスライダ |
| JP2002218730A (ja) * | 2001-01-18 | 2002-08-02 | Sodick Co Ltd | コア付きリニアモータ及びその製造方法、並びにその生産に使用する冷却部材及びその製作方法 |
| JP2003189678A (ja) * | 2001-12-18 | 2003-07-04 | Juki Corp | リニアモータ保護装置、および、電子部品搭載装置 |
| JP2004342638A (ja) * | 2003-05-13 | 2004-12-02 | Nikon Corp | ステージ装置及び露光装置 |
| JP2008117897A (ja) * | 2006-11-02 | 2008-05-22 | Tokyo Seimitsu Co Ltd | プローバ及びプロービング検査方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108140602A (zh) * | 2015-09-24 | 2018-06-08 | 东京毅力科创株式会社 | 载置台装置和探针装置 |
| EP3355345A4 (en) * | 2015-09-24 | 2019-05-08 | Tokyo Electron Limited | STAGE EQUIPMENT AND PROBE DEVICE |
| US10809294B2 (en) | 2015-09-24 | 2020-10-20 | Tokyo Electron Limited | Stage device and probe device |
| CN108140602B (zh) * | 2015-09-24 | 2022-04-08 | 东京毅力科创株式会社 | 载置台装置和探针装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100899468B1 (ko) | 리니어 액츄에이터 및 리니어 액츄에이터를 이용한 부품보유 지지 장치, 다이 본더 장치 | |
| CN112355990B (zh) | 一种xy运动台及运动装置 | |
| CN108140602B (zh) | 载置台装置和探针装置 | |
| KR101996293B1 (ko) | 실장 장치 | |
| JPH07218591A (ja) | 開フレーム門形プローブ探査システム | |
| KR101013170B1 (ko) | 도전성 접촉자 유닛 | |
| CN110828339A (zh) | 一种取料单元及固晶机 | |
| JP2019033150A (ja) | プロービングステーション | |
| EP2804458A1 (en) | Component mounting device | |
| JP2014193045A (ja) | プロービング装置 | |
| JP3090013B2 (ja) | Icデバイスの移載装置 | |
| TWI708653B (zh) | 載物台裝置 | |
| JP5084189B2 (ja) | リニアモータ及び部品搭載装置 | |
| JP6186053B2 (ja) | 実装装置 | |
| WO2013012162A1 (ko) | 향상된 기구적 강성을 갖는 수평수직 이동기구 | |
| KR20220156517A (ko) | 승강 장치 | |
| JP5250269B2 (ja) | 多軸リニアモータ及び部品移載装置 | |
| JPH08250558A (ja) | ウェーハプローバ | |
| KR20210112735A (ko) | 프로브 스테이션 | |
| KR102721104B1 (ko) | 프로브 스테이션 | |
| JP7146525B2 (ja) | ステージ装置およびボンディング装置 | |
| JP7370920B2 (ja) | ステージ装置 | |
| JP7231715B2 (ja) | リニア駆動装置及び部品実装用ヘッド | |
| JP2006281426A (ja) | 位置決め装置 | |
| JP7398896B2 (ja) | 駆動装置、ダイボンダ、ボンディング方法、及び半導体素子製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150810 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160531 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160701 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161213 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170127 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170502 |