JP2014046865A - 自動校正機能を有する船舶 - Google Patents
自動校正機能を有する船舶 Download PDFInfo
- Publication number
- JP2014046865A JP2014046865A JP2012192524A JP2012192524A JP2014046865A JP 2014046865 A JP2014046865 A JP 2014046865A JP 2012192524 A JP2012192524 A JP 2012192524A JP 2012192524 A JP2012192524 A JP 2012192524A JP 2014046865 A JP2014046865 A JP 2014046865A
- Authority
- JP
- Japan
- Prior art keywords
- calibration
- outdrive
- control
- control device
- solenoid valve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Landscapes
- Fluid-Pressure Circuits (AREA)
Abstract
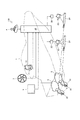
【解決手段】自動校正機能を有する船舶100は、油圧アクチュエータ20によって操舵するアウトドライブ装置10を具備する船舶100であって、作動油の方向を切り替える電磁弁である比例電磁弁30と比例電磁弁30を制御する制御装置40と、を具備し、制御装置40は、比例電磁弁30を制御してアウトドライブ装置10の校正を実施するとともに、校正開始前及び校正実施中に入力されたアウトドライブ装置10に対する制御信号を無効とする。
【選択図】図1
Description
その結果、校正信号を受信したと判定した場合、制御装置40はステップをステップS200に移行させる。
一方、校正信号を受信していないと判定した場合、制御装置40は自動校正の制御を終了する。
その結果、電線及び油圧管に接続不良が無いと判定した場合、制御装置40はステップをステップS400に移行させる。
一方、電線又は油圧管に接続不良が有ると判定した場合、制御装置40は自動校正の制御を終了する。この場合、モニタ6に電線又は油圧管に接続不良が有る旨が表示される。
その結果、電線の誤配線、油圧管の誤配管又は油圧アクチュエータ20の動作不良が無いと判定した場合、制御装置40はステップをステップS600に移行させる。
一方、電線の誤配線、油圧管の誤配管及び油圧アクチュエータ20の動作不良が有ると判定した場合、制御装置40は自動校正の制御を終了する。この場合、モニタ6に電線の誤配線、油圧管の誤配管又は油圧アクチュエータ20の動作不良が有る旨が表示される。
その結果、比例電磁弁30の駆動回路における短絡故障が無いと判定した場合、制御装置40はステップをステップS800に移行させる。
一方、比例電磁弁30の駆動回路における短絡故障が有ると判定した場合、制御装置40は自動校正の制御を終了する。この場合、モニタ6にドライバ35の短絡故障が有る旨が表示される。
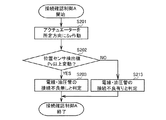
その結果、位置センサ26の検出値Pが所定値Pv以上変動したと判定した場合、制御装置40はステップをステップS203に移行させる。
一方、位置センサ26の検出値Pが所定値Pv以上変動していないと判定した場合、制御装置40はステップをステップS213に移行させる。
その結果、検出値Pが第1校正範囲R1内又は第2校正範囲R2内であると判定した場合、制御装置40はステップをステップS403に移行させる。
一方、検出値Pが第1校正範囲R1内及び第2校正範囲R2内で無いと判定した場合、制御装置40はステップをステップS401に移行させる。
その結果、検出値Pが所定時間t1継続して検出されたと判定した場合、制御装置40はステップをステップS404に移行させる。
一方、検出値Pが所定時間t1継続して検出されていないと判定した場合、制御装置40はステップをステップS401に移行させる。
その結果、一側端位置P1が他側端位置P2よりも大きいと判定した場合、制御装置40はステップをステップS406に移行させる。
一方、一側端位置P1が他側端位置P2以下であると判定した場合、制御装置40はステップをステップS427に移行させる。
その結果、一側端位置P1と他側端位置P2との差が所定値Lv以上であると判定した場合、制御装置40はステップをステップS407に移行させる。
一方、一側端位置P1と他側端位置P2との差が所定値Lv未満であると判定した場合、制御装置40はステップをステップS417に移行させる。なお、本実施形態において、所定値Lvは、油圧アクチュエータ20の基準ストロークである。
その結果、位置センサ26の検出値Pが変動していないと判定した場合、すなわち、ドライバ35から比例電磁弁30に流れる電流Iが電流I0であり比例電磁弁30が作動していないと判定した場合、制御装置40はステップをステップS603に移行させる。
一方、位置センサ26の検出値Pが変動していると判定した場合、すなわち、ドライバ35から比例電磁弁30に流れる電流Iが電流I0よりも大きく比例電磁弁30が作動していると判定した場合、制御装置40はステップをステップS613に移行させる。
その結果、位置センサ26の検出値Pが変動したと判定した場合、すなわち、ドライバ35からの電流I(n)の電流値が比例電磁弁30を駆動させる最小電流値Imin以上であると判定した場合、制御装置40はステップをステップS803に移行させる。
一方、位置センサ26の検出値Pが変動していないと判定した場合、制御装置40はステップをステップS823に移行させる。
その結果、位置センサ26の検出値Pが変動していないと判定した場合、制御装置40はステップをステップS805に移行させる。
一方、位置センサ26の検出値Pが変動していると判定した場合、制御装置40はステップをステップS814に移行させる。
その結果、位置センサ26の検出値Pが変動していると判定した場合、制御装置40はステップをステップS825に移行させる。
一方、位置センサ26の検出値Pが変動していないと判定した場合、制御装置40はステップをステップS834に移行させる。
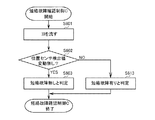
その結果、アウトドライブ装置10の校正開始信号を受信済みであると判定した場合、制御装置40はステップをステップS903に移行させる。
一方、アウトドライブ装置10の校正開始信号を受信していないと判定した場合、制御装置40はステップをステップS913に移行させる。
その結果、アウトドライブ装置10の校正の実施途中であると判定した場合、制御装置40はステップをステップS904に移行させる。
一方、アウトドライブ装置10の校正の実施途中でないと判定した場合、制御装置40はステップをステップ924に移行させる。
その結果、アウトドライブ装置10の校正が完了していると判定した場合、制御装置40はステップをステップS925に移行させる。
一方、アウトドライブ装置10の校正が完了していないと判定した場合、制御装置40はステップをステップS935に移行させる。
このように構成することにより、アウトドライブ装置10の校正実施前及び校正実施中にアウトドライブ装置10が操作されることがない。これにより、アウトドライブ装置10の校正完了前における操作を防止してアウトドライブ装置10の誤作動を抑制することができる。
このように構成することにより、アウトドライブ装置10の校正作業が異常終了した場合、アウトドライブ装置10が操作されることがない。これにより、アウトドライブ装置10の校正完了前における操作を防止してアウトドライブ装置10の誤作動を抑制することができる。
このように構成することにより、アウトドライブ装置10の制御中にアウトドライブ装置10の校正が実施されることがない。これにより、アウトドライブ装置10の校正完了前における操作を防止してアウトドライブ装置10の誤作動を抑制することができる。
このように構成することにより、部品の交換等により再び校正を実施した場合でも、校正が正常に完了するまでアウトドライブ装置10が操作されることがない。これにより、アウトドライブ装置10の校正完了前における操作を防止してアウトドライブ装置10の誤作動を抑制することができる。
20 油圧アクチュエータ
30 比例電磁弁
40 制御装置
100 自動校正機能を有する船舶
Claims (4)
- 油圧アクチュエータによって操舵するアウトドライブ装置を具備する船舶であって、
作動油の方向を切り替える電磁弁と、
電磁弁を制御する制御装置と、を具備し、
制御装置は、
電磁弁を制御してアウトドライブ装置の校正を実施するとともに、校正の実施中に入力されたアウトドライブ装置に対する制御信号を無効とする自動校正機能を有する船舶。 - 前記制御装置は、
前記アウトドライブ装置の校正が正常に完了していない場合、アウトドライブ装置に対する制御信号を無効とする請求項1に記載の自動校正機能を有する船舶。 - 前記制御装置は、
前記アウトドライブ装置の制御中に入力されたアウトドライブ装置の校正信号を無効とする請求項1または請求項2に記載の自動校正機能を有する船舶。 - 前記制御装置は、
前記アウトドライブ装置の校正が正常に完了した後にアウトドライブ装置の校正を実施した場合、アウトドライブ装置の校正が正常に完了するまでアウトドライブ装置に対する制御信号を無効とする請求項1から請求項3のいずれか一項に記載の自動校正機能を有する船舶。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012192524A JP5872422B2 (ja) | 2012-08-31 | 2012-08-31 | 自動校正機能を有する船舶 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012192524A JP5872422B2 (ja) | 2012-08-31 | 2012-08-31 | 自動校正機能を有する船舶 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014046865A true JP2014046865A (ja) | 2014-03-17 |
| JP5872422B2 JP5872422B2 (ja) | 2016-03-01 |
Family
ID=50606948
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012192524A Expired - Fee Related JP5872422B2 (ja) | 2012-08-31 | 2012-08-31 | 自動校正機能を有する船舶 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5872422B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9908605B2 (en) | 2014-01-30 | 2018-03-06 | Yanmar Co., Ltd. | Ship steering system for outdrive device |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH107090A (ja) * | 1996-06-26 | 1998-01-13 | Yanmar Diesel Engine Co Ltd | 舶用推進装置の油圧機構 |
| JP2001317503A (ja) * | 2000-04-03 | 2001-11-16 | Husco Internatl Inc | ソレノイド作動バルブの自動較正方法 |
| JP2002021806A (ja) * | 2000-04-27 | 2002-01-23 | Eaton Corp | 油圧作動装置の自動較正システム及び自動較正方法 |
-
2012
- 2012-08-31 JP JP2012192524A patent/JP5872422B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH107090A (ja) * | 1996-06-26 | 1998-01-13 | Yanmar Diesel Engine Co Ltd | 舶用推進装置の油圧機構 |
| JP2001317503A (ja) * | 2000-04-03 | 2001-11-16 | Husco Internatl Inc | ソレノイド作動バルブの自動較正方法 |
| JP2002021806A (ja) * | 2000-04-27 | 2002-01-23 | Eaton Corp | 油圧作動装置の自動較正システム及び自動較正方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9908605B2 (en) | 2014-01-30 | 2018-03-06 | Yanmar Co., Ltd. | Ship steering system for outdrive device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5872422B2 (ja) | 2016-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9908605B2 (en) | Ship steering system for outdrive device | |
| JP5236236B2 (ja) | 船舶用電動ステアリング装置 | |
| JP2005212603A (ja) | 船舶推進装置の操舵方法 | |
| JP4585570B2 (ja) | パワーステアリング装置及び流体体積流量感応操舵法 | |
| JP5444123B2 (ja) | アウトドライブ装置用操舵システム | |
| JP5657484B2 (ja) | アウトドライブ装置用操船システム | |
| JP5944275B2 (ja) | 自動校正機能を有する船舶 | |
| JP2017171263A (ja) | 船舶 | |
| US20080078318A1 (en) | Power assist steering apparatus and method responsive to volume flow of fluid | |
| JP2010143321A (ja) | 船外機制御装置およびそれを備えた船舶 | |
| JP5872422B2 (ja) | 自動校正機能を有する船舶 | |
| JP2024060162A (ja) | 船舶推進システムおよび船舶 | |
| WO2014017401A1 (ja) | 船舶用の操舵装置 | |
| JP2007253638A (ja) | リモコン装置及び船舶 | |
| JP6397844B2 (ja) | 船舶 | |
| US8015935B2 (en) | Watercraft control apparatus | |
| JP5130077B2 (ja) | 船外機及びそれを備えた船舶 | |
| JP2009227022A (ja) | 操舵装置 | |
| JP5827828B2 (ja) | アウトドライブ装置用操船システム | |
| JP6224937B2 (ja) | 操舵装置の異常検出装置及び異常検出装置付き操舵装置 | |
| WO2011148525A1 (ja) | アウトドライブ装置及びアウトドライブ装置用操舵システム | |
| EP2949573B1 (en) | Ship steering system for out-drive device | |
| JP5575548B2 (ja) | アウトドライブ装置 | |
| US20240239464A1 (en) | Watercraft maneuvering system and watercraft including the watercraft maneuvering system | |
| JP2024101413A (ja) | 操船システムおよびそれを備える船舶 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150223 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151225 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160113 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5872422 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |