JP2014002032A - 信号処理装置および信号処理方法 - Google Patents
信号処理装置および信号処理方法 Download PDFInfo
- Publication number
- JP2014002032A JP2014002032A JP2012137266A JP2012137266A JP2014002032A JP 2014002032 A JP2014002032 A JP 2014002032A JP 2012137266 A JP2012137266 A JP 2012137266A JP 2012137266 A JP2012137266 A JP 2012137266A JP 2014002032 A JP2014002032 A JP 2014002032A
- Authority
- JP
- Japan
- Prior art keywords
- phase
- signal
- digital signal
- angle value
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012545 processing Methods 0.000 title claims abstract description 73
- 238000003672 processing method Methods 0.000 title claims 5
- 238000006243 chemical reaction Methods 0.000 claims abstract description 27
- 238000000034 method Methods 0.000 claims description 55
- 238000012937 correction Methods 0.000 claims description 13
- 238000005259 measurement Methods 0.000 claims description 8
- 238000012544 monitoring process Methods 0.000 claims 3
- 238000009795 derivation Methods 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 15
- 238000004364 calculation method Methods 0.000 description 12
- 239000000872 buffer Substances 0.000 description 4
- 238000007792 addition Methods 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 238000011000 absolute method Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K5/00—Manipulating of pulses not covered by one of the other main groups of this subclass
- H03K5/13—Arrangements having a single output and transforming input signals into pulses delivered at desired time intervals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/3473—Circular or rotary encoders
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K5/00—Manipulating of pulses not covered by one of the other main groups of this subclass
- H03K5/125—Discriminating pulses
- H03K5/1252—Suppression or limitation of noise or interference
Landscapes
- Physics & Mathematics (AREA)
- Nonlinear Science (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【解決手段】信号処理装置において、2相のエンコーダ信号を2相のデジタル信号に変換するアナログデジタル変換手段と、2相のデジタル信号の各々に対して段数Nの移動平均処理を行う移動平均処理手段と、移動平均処理された2相のデジタル信号に対して内挿処理を行い該2相のデジタル信号より角度分解能が高い2相の高分解デジタル信号を生成する内挿処理手段と、2相の高分解デジタル信号の各々について、高分解デジタル信号に含まれる隣接するパルスの間隔を決定する決定手段と、間隔が所定間隔以下であるパルスを除去するパルス除去手段と、を含む。
【選択図】図4
Description
本発明に係る信号処理装置の第1実施形態として、被測定体の位置または角度の位相変化を示す2相のエンコーダ信号を処理する内挿装置を例に挙げて以下に説明する。
はじめに、モータに連動したエンコーダから入力されるエンコーダ信号に対する内挿処理について説明する。なお、以下で説明する内挿処理部100は、アークタンジェント演算を用い内挿を行う内挿処理について説明しているが、他の手法に基づく内挿処理であってもよい。
エリア1(45°以上 90°未満)
エリア2(90°以上 135°未満)
エリア3(135°以上 185°未満)
エリア4(185°以上 225°未満)
エリア5(225°以上 270°未満)
エリア6(270°以上 315°未満)
エリア7(315°以上 360°未満)
アークタンジェント演算部102は、属しているエリア毎にアークタンジェント(tan−1)の値(逆正接値)を算出する。つまり、各エリア内での相対角度値を算出する(相対角度値導出手段)。そして、角度変換部103は、属しているエリアと算出されたアークタンジェントの値とに基づいて、現在の角度値(絶対角度値)を算出する(角度値導出手段)。具体的には、属しているエリアに応じて、以下の演算によりモータの現在の角度値が算出される。
エリア1:90°−tan−1(VA/VB)
エリア2:90°+tan−1(VA/VB)
エリア3:180°−tan−1(VB/VA)
エリア4:180°+tan−1(VB/VA)
エリア5:270°−tan−1(VA/VB)
エリア6:270°+tan−1(VA/VB)
エリア7:360°−tan−1(VB/VA)
ここで、VAは、A相デジタル信号112の基準電位(零点)に対する電位差である。また、VBは、B相デジタル信号113の基準電位(零点)に対する電位差である。
360°/16=22.5°
を計算し、算出した分解能(ここでは22.5°)を2相パルス生成部105へ渡す。
図4は、第1実施形態に係る内挿装置の構成図である。具体的には、上述の内挿処理部100の前段に前段ノイズ除去部として移動平均部400を配備し、内挿処理部100の後段に後段ノイズ除去部としてノイズ除去部401を配備する構成となっている。
図6は、移動平均部400における移動平均処理のフローチャートである。当該処理は、A/D変換部130によって多値のデジタル信号に変換されたA相デジタル信号112とB相デジタル信号113のそれぞれに対して行われる。
第2実施形態では、内挿処理部100の前段にLPF(ローパスフィルタ)部700を配備し後段にノイズ除去部701を配備する構成について説明する。
図8は、第2実施形態に係る内挿装置の構成図である。第2実施形態の内挿装置は、内挿処理部100の前段に前段ノイズ除去部としてLPF(ローパスフィルタ)部700を配備し、内挿処理部100の後段に後段ノイズ除去部としてノイズ除去部701を配備する構成となっている。内挿処理部100に関しては、第1実施形態と同様であるため説明は省略する。
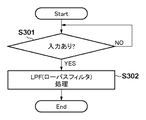
図10は、LPF部(ローパスフィルタ)700におけるLPF処理のフローチャートである。当該処理は、A/D変換部130によって多値のデジタル信号に変換されたA相デジタル信号112とB相デジタル信号113のそれぞれに対して行われる。
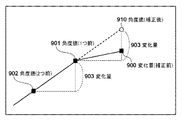
第3実施形態では、内挿処理部100において、角度変換により得られる角度値をモニタし、急激な角度ギャップを有する角度値を補正する例について説明する。
図12は、第3実施形態に係る内挿装置の構成図である。第3実施形態の内挿装置は、第1実施形態の内挿装置内の内挿処理部100において、角度変換部103と分割計算部104との間に、角度モニタ部800と角度補正部801を配置した構成となっている。なお、内挿処理部100、移動平均部400、ノイズ除去部401に関しては、第1実施形態と同様であるため説明は省略する。
図14は、角度モニタ部800及び角度補正部801における角度値補正処理のフローチャートである。上述したように当該処理は、角度変換部103によって変換された角度値に対して行われる。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (10)
- 被測定体の位置または角度の位相変化を示す2相のエンコーダ信号を処理する信号処理装置であって、
2相のエンコーダ信号を2相のデジタル信号に変換するアナログデジタル変換手段と、
前記2相のデジタル信号の各々に対して段数Nの移動平均処理を行う移動平均処理手段と、
前記移動平均処理された2相のデジタル信号に対して内挿処理を行い該2相のデジタル信号より角度分解能が高い2相の高分解デジタル信号を生成する内挿処理手段と、
前記2相の高分解デジタル信号の各々について、高分解デジタル信号に含まれる隣接するパルスの間隔を決定する決定手段と、
前記決定手段により決定された間隔が所定間隔以下であるパルスを除去するパルス除去手段と、
を含むことを特徴とする信号処理装置。 - 前記2相の高分解デジタル信号の各々について、高分解デジタル信号に含まれる隣接するパルスの間隔の段数Mの移動平均値を導出する導出手段を更に含み、
前記所定間隔は、前記導出手段により導出された段数Mの移動平均値に基づいて設定されることを特徴とする請求項1に記載の信号処理装置。 - 被測定体の位置または角度の位相変化を示す2相のエンコーダ信号を処理する信号処理装置であって、
2相のエンコーダ信号を2相のデジタル信号に変換するアナログデジタル変換手段と、
前記2相のデジタル信号の各々に対して所定の遮断周波数が設定された低域通過フィルタ処理を行う低域通過フィルタ手段と、
前記低域通過フィルタ処理された2相のデジタル信号に対して内挿処理を行い該2相のデジタル信号より角度分解能が高い2相の高分解デジタル信号を生成する内挿処理手段と、
前記2相の高分解デジタル信号の各々について、パルス幅が所定幅以下であるパルスを除去するパルス除去手段と、
を含むことを特徴とする信号処理装置。 - 前記所定幅は、前記遮断周波数に基づいて設定されることを特徴とする請求項3に記載の信号処理装置。
- 前記内挿処理手段は、
前記2相のデジタル信号に基づいて前記被測定体の位相範囲を判定する判定手段と、
前記2相のデジタル信号の比の逆正接値に基づき、前記判定された位相範囲における相対角度値を導出する相対角度値導出手段と、
前記判定手段により判定された位相範囲と前記相対角度値導出手段により導出された相対角度値とに基づいて絶対角度値を導出する角度値導出手段と、
前記角度値導出手段により導出された絶対角度値に基づいて、前記2相の高分解デジタル信号を生成する2相信号生成手段と、
を含むことを特徴とする請求項1乃至4の何れか一項に記載の信号処理装置。 - 前記内挿処理手段は、
前記角度値導出手段により導出された絶対角度値の変化を監視する監視手段と、
前記監視手段により所定角度より大きい角度変化が検出された場合、現在着目する絶対角度値を補正する補正手段と、
を更に含むことを特徴とする請求項5に記載の信号処理装置。 - 前記所定角度は、現在着目する絶対角度値に先行する1以上の絶対角度値における角度変化により決定されることを特徴とする請求項6に記載の信号処理装置。
- 前記補正手段は、現在着目する絶対角度値を、該現在着目する絶対角度値に先行する1以上の絶対角度値における角度変化に基づいて補正することを特徴とする請求項6又は7に記載の信号処理装置。
- 被測定体の位置または角度の位相変化を示す2相のエンコーダ信号を処理する信号処理方法であって、
2相のエンコーダ信号を2相のデジタル信号に変換するアナログデジタル変換工程と、
前記2相のデジタル信号の各々に対して段数Nの移動平均処理を行う移動平均処理工程と、
前記移動平均処理された2相のデジタル信号に対して内挿処理を行い該2相のデジタル信号より角度分解能が高い2相の高分解デジタル信号を生成する内挿処理工程と、
前記2相の高分解デジタル信号の各々について、高分解デジタル信号に含まれる隣接するパルスの間隔を決定する決定工程と、
前記決定工程により決定された間隔が所定間隔以下であるパルスを除去するパルス除去工程と、
を含むことを特徴とする信号処理方法。 - 被測定体の位置または角度の位相変化を示す2相のエンコーダ信号を処理する信号処理方法であって、
2相のエンコーダ信号を2相のデジタル信号に変換するアナログデジタル変換工程と、
前記2相のデジタル信号の各々に対して所定の遮断周波数が設定された低域通過フィルタ処理を行う低域通過フィルタ工程と、
前記低域通過フィルタ処理された2相のデジタル信号に対して内挿処理を行い該2相のデジタル信号より角度分解能が高い2相の高分解デジタル信号を生成する内挿処理工程と、
前記2相の高分解デジタル信号の各々について、パルス幅が所定幅以下であるパルスを除去するパルス除去工程と、
を含むことを特徴とする信号処理方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012137266A JP2014002032A (ja) | 2012-06-18 | 2012-06-18 | 信号処理装置および信号処理方法 |
| US13/889,760 US8872565B2 (en) | 2012-06-18 | 2013-05-08 | Signal processing apparatus and signal processing method |
| US14/482,522 US9024672B2 (en) | 2012-06-18 | 2014-09-10 | Signal processing apparatus and signal processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012137266A JP2014002032A (ja) | 2012-06-18 | 2012-06-18 | 信号処理装置および信号処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014002032A true JP2014002032A (ja) | 2014-01-09 |
| JP2014002032A5 JP2014002032A5 (ja) | 2015-07-30 |
Family
ID=49755329
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012137266A Pending JP2014002032A (ja) | 2012-06-18 | 2012-06-18 | 信号処理装置および信号処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US8872565B2 (ja) |
| JP (1) | JP2014002032A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10312837B2 (en) * | 2016-05-02 | 2019-06-04 | Canon Kabushiki Kaisha | Information processing apparatus, and recording medium storing computer program |
| JP7056367B2 (ja) * | 2018-05-17 | 2022-04-19 | トヨタ自動車株式会社 | 認識エラー検出装置、電動ブレーキ制御装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5128465A (en) * | 1974-09-04 | 1976-03-10 | Hitachi Ltd | Kauntaomochiita noizusapuresuhoshiki |
| JPH0791981A (ja) * | 1993-09-24 | 1995-04-07 | Horiba Ltd | パルス入力信号のノイズ除去回路 |
| JP2000270575A (ja) * | 1999-03-18 | 2000-09-29 | Canon Inc | モータ駆動制御装置、モータ駆動制御方法、及び記憶媒体 |
| JP2010266260A (ja) * | 2009-05-13 | 2010-11-25 | Fuji Electric Systems Co Ltd | 異常監視装置 |
| JP2011180073A (ja) * | 2010-03-03 | 2011-09-15 | Canon Inc | エンコーダパルス生成装置、エンコーダパルス生成方法、及び、コンピュータプログラム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08201111A (ja) | 1995-01-30 | 1996-08-09 | Sony Magnescale Inc | 内挿装置 |
| US6590971B1 (en) * | 2000-03-01 | 2003-07-08 | Rockwell Electronic Commerce Technologies Llc | Automatic call distribution system contact routing with media-port |
| US6573769B1 (en) * | 2002-06-27 | 2003-06-03 | Pericom Semiconductor Corp. | Phase-locked loop (PLL) with mixer for subtracting outer-band phase noise |
| US7532989B1 (en) * | 2003-02-13 | 2009-05-12 | Pentomics, Inc. | System for analysis and design of direct digital frequency synthesizers |
| US7136799B2 (en) * | 2003-03-21 | 2006-11-14 | Sun Microsystems, Inc. | Mixed signal delay locked loop characterization engine |
| JP2006129180A (ja) * | 2004-10-29 | 2006-05-18 | Elpida Memory Inc | クロック遅延回路 |
| FR2938083B1 (fr) * | 2008-10-31 | 2013-03-29 | Thales Sa | Procede d'amelioration de la resolution et de correction des distorsions pour modulateur sigma-delta et modulateur sigma-delta mettant en oeuvre le procede |
| JP5158034B2 (ja) * | 2009-08-12 | 2013-03-06 | 富士通株式会社 | 無線装置及び信号処理方法 |
| US8610514B2 (en) * | 2011-06-20 | 2013-12-17 | Rgb Networks, Inc. | Full spectrum modulator for digital television signals |
-
2012
- 2012-06-18 JP JP2012137266A patent/JP2014002032A/ja active Pending
-
2013
- 2013-05-08 US US13/889,760 patent/US8872565B2/en active Active
-
2014
- 2014-09-10 US US14/482,522 patent/US9024672B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5128465A (en) * | 1974-09-04 | 1976-03-10 | Hitachi Ltd | Kauntaomochiita noizusapuresuhoshiki |
| JPH0791981A (ja) * | 1993-09-24 | 1995-04-07 | Horiba Ltd | パルス入力信号のノイズ除去回路 |
| JP2000270575A (ja) * | 1999-03-18 | 2000-09-29 | Canon Inc | モータ駆動制御装置、モータ駆動制御方法、及び記憶媒体 |
| JP2010266260A (ja) * | 2009-05-13 | 2010-11-25 | Fuji Electric Systems Co Ltd | 異常監視装置 |
| JP2011180073A (ja) * | 2010-03-03 | 2011-09-15 | Canon Inc | エンコーダパルス生成装置、エンコーダパルス生成方法、及び、コンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US8872565B2 (en) | 2014-10-28 |
| US20130335138A1 (en) | 2013-12-19 |
| US9024672B2 (en) | 2015-05-05 |
| US20140375368A1 (en) | 2014-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4835606B2 (ja) | 回転体の位相・速度検出装置 | |
| US8188896B2 (en) | Digital converter for processing resolver signal | |
| JP5893360B2 (ja) | インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法 | |
| US9059732B2 (en) | Resolver-to-digital converter | |
| US9200928B2 (en) | Position detector | |
| EP2700909A1 (en) | Resolver interface | |
| CA2648410A1 (en) | Clock generation circuit, analog-digital angle converter using the same, and angle detection apparatus | |
| US8775118B2 (en) | Angle detection apparatus | |
| JP2014025871A (ja) | エンコーダ出力信号補正装置 | |
| JP2008122264A (ja) | エンコーダの位置情報補間回路 | |
| JP2014002032A (ja) | 信号処理装置および信号処理方法 | |
| KR101885275B1 (ko) | 노이즈를 제거한 신호를 이용하여 각도를 결정하는 방법, 엔코더의 출력 신호를 보정하는 방법 및 앱솔루트 엔코더 | |
| JP5872107B2 (ja) | 標本化プロセスの妨害除去方法、および、当該妨害除去方法を実施するための装置 | |
| JP2011180073A (ja) | エンコーダパルス生成装置、エンコーダパルス生成方法、及び、コンピュータプログラム | |
| JP2010078340A (ja) | エンコーダの誤差補正方法 | |
| KR101012740B1 (ko) | 레졸버 디지털 변환장치 및 이를 이용한 위치 측정 장치 | |
| JP2009254066A (ja) | ズレ検出装置及びズレ検出方法及び位置検出センサ付電動機の製造方法 | |
| EP2787644B1 (de) | Digitale Signalverarbeitungseinrichtung für einen Winkelbestimmer | |
| JP4109149B2 (ja) | 計測装置 | |
| JP2005140737A (ja) | 磁気式エンコーダ装置 | |
| KR101418150B1 (ko) | 정현파 광학 엔코더 신호 보상 방법 및 장치 | |
| JP2010014410A (ja) | 回転体の回転位置検出装置 | |
| JPS6347612A (ja) | 変位検出装置 | |
| JP2010249704A (ja) | 内挿装置 | |
| CN107306136B (zh) | 正弦波信号的断开检测设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150611 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150611 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160506 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160701 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170106 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170306 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170904 |