JP2013545105A - 凍結試料をアリコートするための装置および方法 - Google Patents
凍結試料をアリコートするための装置および方法 Download PDFInfo
- Publication number
- JP2013545105A JP2013545105A JP2013542034A JP2013542034A JP2013545105A JP 2013545105 A JP2013545105 A JP 2013545105A JP 2013542034 A JP2013542034 A JP 2013542034A JP 2013542034 A JP2013542034 A JP 2013542034A JP 2013545105 A JP2013545105 A JP 2013545105A
- Authority
- JP
- Japan
- Prior art keywords
- sample
- frozen
- frozen sample
- coring
- core
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/02—Devices for withdrawing samples
- G01N1/04—Devices for withdrawing samples in the solid state, e.g. by cutting
- G01N1/08—Devices for withdrawing samples in the solid state, e.g. by cutting involving an extracting tool, e.g. core bit
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/286—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q involving mechanical work, e.g. chopping, disintegrating, compacting, homogenising
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/483—Physical analysis of biological material
- G01N33/487—Physical analysis of biological material of liquid biological material
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/42—Low-temperature sample treatment, e.g. cryofixation
Abstract
【選択図】図2
Description
(a) ロボットシステムが、凍結試料コアを得るために、コアリングビットを凍結試料の中へ軸方向に移動させる速度、
(b) ロボットシステムが、凍結試料コアを得るために、コアリングビットを凍結試料の中へ軸方向に移動させる力、
(c) ロボットシステムが、凍結試料コアを得るために、コアリングビットを回転させる速度、
(d) 凍結試料コアを得るために、コアリングビットに印加されるトルク、
(e) 凍結試料コアを得るために、コアリングビットを凍結試料の中へ軸方向に移動させるときに、そのコアリングビットに印加される衝撃力の量、
(f) そこから凍結試料コアが取り出される、各試料のそれぞれの中の位置、
(g) 試料コアリングデバイスを凍結試料の中へ移動させる深さ、および
(h) 凍結試料コアを取り出すために、試料コアリングデバイスによって使用されるドリルビットのサイズまたは形状、
のうちの1つ以上において互いに異なる。
(a) プラットフォームから試料コアリングステーションまで容器を移動させる機能、
(b) プラットフォームから、試料コアリングステーションから離間されたアリコート受容ステーションまで別の容器を移動させる機能、
(c) 試料コアリングおよびアリコート受容ステーションの定位置で容器を保持および解放するために、1つ以上のクランピング機構を作動および解放させる機能、
(d) 容器からねじ付きキャップを除去する機能、
(e) そこから試料コアが既に取り出された試料の任意の位置の場所を特定するために、凍結試料の表面全体にわたって試料検査デバイスからのビームを走査する機能、
(f) 凍結試料コアを得るために、試料コアリングデバイスを試料容器の中へ移動させる機能、
(g) 凍結試料コアを、アリコート受容ステーションでアリコート受容容器に移送する機能、
(h) ねじ付きキャップを容器上へ戻してねじ込む機能、
(i) 試料コアリングおよびアリコート受容ステーションからプラットフォームまで容器を逆に移動させる機能、および
(j) 試料コアリングデバイスを、洗浄するための洗浄ステーションに移動させる機能、
のうちの1つ以上に対する唯一の位置制御を提供する。
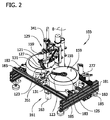
(a) 一時貯蔵場所123から試料コアリングステーション125まで容器を移動させる作業、
(b) 一時貯蔵場所から、試料コアリングステーションから離間されたアリコート受容ステーション127まで別の容器を移動させる作業、
(c) 試料コアリングおよびアリコート受容ステーションの定位置で容器を保持および解放するために、クランピング機構271を作動および解放させる作業、
(d) 容器からねじ付きキャップを除去する作業、
(e) そこから試料コアが既に取り出された試料の任意の位置の場所を特定するために、凍結試料の上面全体にわたって試料検査デバイス341からのビームを走査する作業、
(f) まだコアリングされていない場所から凍結試料コアを得るために、試料コアリングデバイス(例えば、コアリングビット215)を試料容器の中へ移動させる作業、
(g) 凍結試料コアを、アリコート受容ステーションのアリコート受容容器に移送する作業、
(h) ねじ付きキャップを容器上へ戻してねじ込む作業、
(i) 試料コアリングおよびアリコート受容ステーションから一時貯蔵場所まで容器を逆に移動させる作業、および
(j) 試料コアリングデバイスを洗浄ステーションに移動させる作業、
のうちの1つ以上(例えば、全て)を達成することが可能であることを認識されるであろう。
(a) ロボット103が、試料コアを得るために、コアリングビット215を凍結試料の中へ軸方向に移動させる速度、
(b) ロボット103が、試料コアを得るために、コアリングビット215を凍結試料の中へ軸方向に移動させる力、
(c) ロボット103が、試料コアを得るために、コアリングビット215を回転させる速度、
(d) 試料コアを得るために、コアリングビットに印加されるトルク、
(e) 試料コアを得るために、コアリングビット215を凍結試料の中へ軸方向に移動させるときに、そのコアリングビットに印加される衝撃力の量、
(f) そこから凍結試料コアが取り出される、各試料のそれぞれの中の位置、
(g) 試料コアリングデバイスを凍結試料の中へ移動させる深さ、および
(h) 凍結試料コアを取り出すために、試料コアリングデバイスによって使用されるドリルビットのサイズまたは形状、
のうちの1つ以上において互いに異なる種々のモードで動作するように好適にプログラムおよび/または配線で接続される。
Claims (57)
- 2つ以上の物質を含む混合物である、容器の中に含まれる凍結試料のアリコートを得る方法であって、
試料コアリングデバイスをある場所で前記凍結試料の中へ移動させ、次いで、前記試料から前記試料コアリングデバイスを引き出して、前記場所から取り出された凍結試料コアの形態で前記アリコートを得ること、
を含み、前記場所は、前記凍結試料コア中の少なくとも1つの関心の物質の濃度が、前記凍結試料に存在し得る任意の濃度勾配に関わらず、前記試料中の前記少なくとも1つの関心の物質の総濃度を代表する、半径方向位置になるように選択される、
方法。 - 前記場所は、前記試料の幾何学的中心から半径方向にオフセットされる、請求項1に記載の方法。
- 前記試料コアリングデバイスを前記凍結試料の中へ移動させることは、前記場所において前記試料の片側から前記試料の対向側まで実質的に幅広く前記試料コアリングデバイスを移動させることを含む、請求項1および2のいずれか1項に記載の方法。
- 前記試料は、血漿、血清、尿、全血、臍帯血、他の血液に基づく派生物、脳脊髄液、粘液、腹水、唾液、羊水、精液、涙液、汗、樹液もしくは他の植物由来の流体、動物細胞、植物細胞、原生動物細胞、真菌細胞、細菌細胞、バフィーコート細胞、細胞溶解物、細胞ホモジネート、細胞懸濁液、ミクロソーム、細胞器官、核酸、懸濁液もしくは溶液中の小分子化合物から成る群から選択される物質を含む、請求項1〜3のいずれか1項に記載の方法。
- 前記試料は、血清および血漿から成る群から選択される物質を含む、請求項4に記載の方法。
- 試料検査システムを使用して、前記試料から任意の凍結試料コアが既に取り出されたかどうかを判定することをさらに含み、前記場所は、前記試料からいかなる凍結試料コアもまだ取り出されていない場所になるように選択される、請求項1〜5のいずれか1項に記載の方法。
- 請求項1〜6のいずれか1項に記載の方法を実装するようにプログラムされるか、または配線で接続される、ロボットシステム。
- 2つ以上の物質を含む混合物である、容器の中に含まれる凍結試料のアリコートを得る方法であって、
第1の場所で試料コアリングデバイスを前記凍結試料の中へ移動させ、次いで、前記試料から前記試料コアリングデバイスを引き出して、前記第1の場所から取り出された凍結試料コアの形態で第1のアリコートを得ることと、
前記試料コアリングデバイスまたは別の試料コアリングデバイスを、前記第1の場所と異なる前記試料内の半径方向位置を有する第2の場所で、前記凍結試料の中へ移動させ、次いで、前記試料から前記試料コアリングデバイスを引き出して、前記第2の場所から取り出された凍結試料コアの形態で第2のアリコートを得ることと、
前記第1および第2のアリコートを組み合わせて、集合アリコートを形成することと、
を含み、前記第1および第2の場所は、前記集合アリコート中の少なくとも1つの関心の物質の濃度が、前記凍結試料に存在し得る任意の濃度勾配に関わらず、前記試料中の前記少なくとも1つの関心の物質の総濃度を代表するように選択される、
方法。 - 凍結試料から凍結アリコートを得るためのシステムであって、
前記凍結試料を含む複数の容器を支持するためのプラットフォームと、
前記凍結試料の中へ移動させ、次いで、前記凍結試料から引き出すことによって、前記凍結試料から凍結試料コアを取り出すように適合されるコアリングビットを備える、試料コアリングデバイスと、
前記試料コアリングデバイスとプラットフォームとの間で相対的な動きを生じさせ、前記凍結試料から凍結試料コアを取り出すように前記試料コアリングデバイスを動作させるように適合される、ロボットシステムと、
前記ロボットシステムを制御するように適合され、ユーザからの入力を受け付け、前記入力に応答して複数の異なるモードのうちの1つで動作するようにプログラムされるプロセッサと、を備え、前記モードは、以下のパラメータ、すなわち、
(a)前記ロボットシステムが、前記凍結試料コアを得るために、前記コアリングビットを前記凍結試料の中へ軸方向に移動させる速度、
(b)前記ロボットシステムが、前記凍結試料コアを得るために、前記コアリングビットを前記凍結試料の中へ軸方向に移動させる力、
(c)前記ロボットシステムが、前記凍結試料コアを得るために、前記コアリングビットを回転させる速度、
(d)前記凍結試料コアを得るために、前記コアリングビットに印加されるトルク、
(e)前記凍結試料コアを得るために、前記コアリングビットを前記凍結試料の中へ軸方向に移動させるときに、前記コアリングビットに印加される衝撃力の量、
(f)そこから前記凍結試料コアが取り出される、前記各試料のそれぞれの中の位置、
(g)前記試料コアリングデバイスを前記凍結試料の中へ移動させる深さ、および
(h)前記凍結試料コアを取り出すために、前記試料コアリングデバイスによって使用されるドリルビットのサイズまたは形状、のうちの1つ以上において互いに異なる、
システム。 - 前記試料は、生物学的材料を含む、請求項9に記載のシステム。
- 前記モードのうちの少なくとも1つは、前記凍結試料に亀裂を生じさせる、または別様には損傷を与えることなく、血清および血漿から成る群から選択される凍結試料からアリコートを取り出すことを容易にするように適合される、請求項9および10のいずれか1項に記載のシステム。
- 前記モードのうちの少なくとも1つは、血清、血漿、細胞、尿、固体組織、脳脊髄液およびそれらの組み合わせから成る群から選択される凍結試料からアリコートを取り出すことを容易にするように適合される、請求項9および10のいずれか1項に記載のシステム。
- 前記モードのうちの少なくとも1つは、前記試料の劣化を最小限にして、血清および血漿のうちの少なくとも1つを含む凍結試料からアリコートを取り出すことを容易にするように適合される、請求項9および10のいずれか1項に記載のシステム。
- 前記モードは、前記ロボットシステムが、前記凍結試料コアを得るために、前記コアリングビットを前記凍結試料の中へ軸方向に移動させる速度において互いに異なる、請求項9〜13のいずれかに記載のシステム。
- 前記モードは、前記ロボットシステムが、前記凍結試料コアを得るために、前記コアリングビットを前記凍結試料の中へ軸方向に移動させる力において互いに異なる、請求項9〜14のいずれかに記載のシステム。
- 前記モードは、前記ロボットシステムが、前記凍結試料コアを得るために、前記コアリングビットを回転させる速度において互いに異なる、請求項9〜15のいずれかに記載のシステム。
- 前記モードは、前記凍結試料コアを得るために、前記コアリングビットに印加されるトルクにおいて互いに異なる、請求項9〜16のいずれかに記載のシステム。
- 前記モードは、前記凍結試料コアを得るために、前記コアリングビットを前記凍結試料の中へ軸方向に移動させるときに、前記コアリングビットに印加される衝撃力の量において互いに異なる、請求項9〜17のいずれかに記載のシステム。
- 前記モードは、そこから前記凍結試料コアが取り出される、前記各試料のそれぞれの中の位置において互いに異なる、請求項9〜18のいずれかに記載のシステム。
- 前記モードは、前記試料コアリングデバイスを前記凍結試料の中へ移動させる深さにおいて互いに異なる、請求項9〜19のいずれかに記載のシステム。
- 前記モードは、前記凍結試料コアを取り出すために、前記試料コアリングデバイスによって使用されるドリルビットのサイズまたは形状において互いに異なる、請求項9〜20のいずれかに記載のシステム。
- 高精度自動位置決めシステムであって、
フレームと、
前記フレームによって支持され、複数の試料を支持するように適合される、プラットフォームと、
前記フレームによって支持され、試料が前記プラットフォーム上にあるときに前記試料の加熱および冷却のうちの少なくとも1つを行うように動作可能である、温度制御ブロックと、
前記フレームによって支持され、前記プラットフォームから試料を持ち上げ、前記試料を前記プラットフォームに対して移動させ、次いで、前記試料を前記プラットフォームに対して異なる位置に降ろして配置するように適合される、ロボットと、
を備え、前記フレームは、前記プラットフォームが前記温度制御ブロックに接触することなく前記温度制御ブロックに対して移動することを可能にする空隙によって、前記温度制御ブロックが前記プラットフォームから離間されるように、前記温度制御ブロックを支持し、前記フレームは、前記フレームを前記温度制御ブロックの熱膨張または収縮から隔離するように適合される複数のフレクシャーマウントによって、前記温度制御ブロックに接続される、
システム。 - 前記プラットフォームは、前記フレームに対して回転するように載置される、ターンテーブルを備える、請求項21に記載のシステム。
- 前記フレームに対して回転するように載置される第2のターンテーブルをさらに備え、前記ターンテーブルのそれぞれは、前記フレクシャーマウントによって、前記温度制御ブロックの熱膨張および収縮から機械的に隔離される、請求項22に記載のシステム。
- 前記フレクシャーマウントは、それぞれ、曲げ軸に沿って屈曲させるように適合される比較的可撓性のセグメントを備え、前記曲げ軸は、前記フレクシャーマウントが前記軸上で曲がるときに、前記フレキクシャーマウントが前記温度制御ブロックの中央に向かって、またはそこから離れて半径方向に移動するように配向される、請求項21〜23のいずれか1項に記載のシステム。
- 各フレクシャーマウントの前記曲げ軸は、異なる配向にある、請求項24に記載のシステム。
- 前記可撓性セグメントは、第1の可撓性セグメントであり、各フレクシャーマウントはさらに、前記第1の可撓性セグメントの前記曲げ軸に実質的に平行である、曲げ軸の周囲で曲がるように適合される、第2の可撓性セグメントを備える、請求項24および25のいずれか1項に記載のシステム。
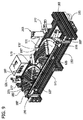
- 複数の凍結試料から凍結アリコートを取り出すためのシステムであって、
フレームと、
前記フレームによって支持される、筐体と、
前記フレームによって支持され、前記筐体内で前記凍結試料を支持するように適合される、プラットフォームと、
摂氏約0度〜摂氏約−180度の範囲の温度に、前記プラットフォーム上および前記筐体内の試料を維持するように適合される、温度制御システムと、
前記プラットフォームから試料を持ち上げ、前記試料を前記プラットフォームに対して移動させ、次いで、前記試料を前記プラットフォームに対して異なる位置に降ろして配置するように適合されるアームを有する、ロボットであって、前記ロボットアームは、前記筐体の外側の場所で前記フレーム上に載置される、ロボットと、
前記ロボットアーム上に載置され、前記凍結試料から凍結試料コアを取り出すように動作可能である、試料コアリングデバイスと、
を備える、システム。 - 前記フレームによって支持される、複数のローラーと、前記フレームに対して回転させるために前記ローラーによって回転可能に支持される、ターンテーブルとをさらに備え、前記プラットフォームは、前記ターンテーブル上にあり、前記ローラーは、前記筐体の外縁部に位置付けられる、請求項27に記載のシステム。
- 前記プラットフォームの回転を駆動するように適合され、前記筐体の外側に位置付けられる、モーターをさらに備える、請求項27および28のいずれか1項に記載のシステム。
- 前記温度制御システムは、前記ターンテーブルの下に温度制御ブロックを備え、前記ローラーは、前記温度制御ブロックの半径方向外向きに離間される、請求項28および29のいずれか1項に記載のシステム。
- 前記ローラーは、前記ターンテーブルと前記筐体との間に位置付けられる、請求項28〜30のいずれか1項に記載のシステム。
- 前記温度制御システムは、摂氏約−40度〜摂氏約−180度の範囲の温度に、前記プラットフォーム上および前記筐体内の試料を維持するように適合される、請求項27〜31のいずれか1項に記載のシステム。
- 前記温度制御システムは、前記凍結試料が維持される温度を変動させるために、選択的に調整可能である、請求項32に記載のシステム。
- 複数の試料容器から凍結試料のアリコートを得て、前記アリコートを複数のアリコート受容容器に移送するためのシステムであって、
少なくとも1つのターンテーブルを含み、前記試料容器および前記アリコート受容容器を支持するための、プラットフォームと、
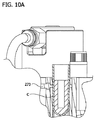
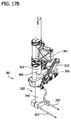
前記凍結試料の中へ移動させ、次いで、前記凍結試料から引き出すことによって、前記凍結試料から凍結試料コアを取り出すように適合される、試料コアリングデバイスであって、実質的に垂直な軸の周囲で回転可能であり、かつ前記プラットフォームに対して垂直に上下に移動可能であるアーム上で前記プラットフォームの上側に載置される、試料コアリングデバイスと、
前記ターンテーブルの回転を駆動するように適合される、第1のサーボモーターと、
前記アームを回転させるように適合される、第2のサーボモーターと、
前記プラットフォームに対して前記アームを上下に移動させるように適合される、第3のサーボモーターと、
を備え、前記システムは、前記第1、第2、および第3のサーボモーターが、前記システムによって実行することができる以下の機能、すなわち、
(a)前記プラットフォームから試料コアリングステーションまで容器を移動させる機能、
(b)前記プラットフォームから、前記試料コアリングステーションから離間されたアリコート受容ステーションまで別の容器を移動させる機能、
(c)前記試料コアリングおよびアリコート受容ステーションの定位置で前記容器を保持および解放するために、1つ以上のクランピング機構を作動および解放させる機能、
(d)前記容器からねじ付きキャップを除去する機能、
(e)そこから試料コアが既に取り出された前記試料の任意の位置の場所を特定するために、前記凍結試料の表面全体にわたって試料検査デバイスからのビームを走査する機能、
(f)凍結試料コアを得るために、試料コアリングデバイスを前記試料容器の中へ移動させる機能、
(g)前記凍結試料コアを、前記アリコート受容ステーションの前記アリコート受容容器に移送する機能、
(h)前記ねじ付きキャップを前記容器上へ戻してねじ込む機能、
(i)前記試料コアリングおよびアリコート受容ステーションから前記プラットフォームまで前記容器を逆に移動させる機能、および
(j)前記試料コアリングデバイスを、洗浄するための洗浄ステーションに移動させる機能、
のうちの1つ以上に対する唯一の位置制御を提供する、システム。 - 前記プラットフォームは、第1および第2のターンテーブルを備え、前記第1のサーボモーターは、前記第1および第2のターンテーブルの回転を駆動するように適合される、請求項34に記載のシステム。
- 前記試料コアリングおよびアリコート受容ステーションのうちの1つの位置に前記容器を挟持するように動作可能であるクランピングシステムをさらに含み、前記クランピング機構は、前記ターンテーブル上に載置されるトグル機構と、前記ターンテーブルに隣接して載置されるトグル機構アクチュエータとを含み、よって、前記第1のサーボモーターは、前記トグル機構アクチュエータによって動作させることができる場所に前記トグル機構を正確に位置付けるために使用することができる、請求項34に記載のシステム。
- 前記アーム上に載置される、把持機構をさらに備え、前記把持機構は、前記ターンテーブルを回転させて、前記試料コアリングおよびアリコート受容ステーションのうちの1つで容器を回転させる間に、ねじ付き容器キャップを保持するように適合される、請求項36に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、前記プラットフォームから前記試料コアリングステーションまで前記容器を移動させるための唯一の位置制御を提供するように構成される、請求項34〜37のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、前記プラットフォームから前記アリコート受容ステーションまで前記容器を移動させるための唯一の位置制御を提供するように構成される、請求項34〜38のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、前記試料コアリングおよびアリコート受容ステーションの定位置で前記容器を保持および解放するために、前記1つ以上のクランピング機構を作動および解放させるための唯一の位置制御を提供するように構成される、請求項34〜39のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、前記容器からねじ付きキャップを除去するための唯一の位置制御を提供するように構成される、請求項34〜40のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、そこから凍結試料コアが既に取り出された前記試料の任意の位置の場所を特定するために、前記凍結試料の表面にわたって試料検査デバイスからのビームを走査するための唯一の位置制御を提供するように構成される、請求項34〜41のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、凍結試料コアを得るために、試料コアリングデバイスを前記試料容器の中へ移動させるための唯一の位置制御を提供するように構成される、請求項34〜42のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、前記凍結試料コアを、前記アリコート受容ステーションの前記アリコート受容容器に移送するための唯一の位置制御を提供するように構成される、請求項34〜43のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、前記ねじ付きキャップを前記容器上へ戻してねじ込むための唯一の位置制御を提供するように構成される、請求項34〜44のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、前記試料コアリングおよびアリコート受容ステーションから前記プラットフォームまで前記容器を逆に移動させるための唯一の位置制御を提供するように構成される、請求項34〜45のいずれか1項に記載のシステム。
- 前記システムは、前記第1、第2、および第3のサーボモーターが、前記試料コアリングデバイスを、洗浄するための洗浄ステーションに移動させるための唯一の位置制御を提供するように構成される、請求項34〜46のいずれか1項に記載のシステム。
- 前記システムは、パラグラフ(a)〜(j)に列記される全ての機能を実行するように動作可能である、請求項34に記載のシステム。
- 凍結試料のアリコートを得るためのシステムであって、
凍結試料を含む複数の容器を支持するためのプラットフォームと、
前記凍結試料の中へ移動させ、次いで、前記凍結試料から引き出すことによって、前記凍結試料から凍結試料コアを取り出すように適合されるコアリングビットを備える、試料コアリングデバイスと、
前記試料コアリングデバイスとプラットフォームとの間で相対的な動きを生じさせ、前記凍結試料から試料コアを取り出すように前記試料コアリングデバイスを動作させるように適合される、ロボットシステムと、
そこから凍結試料コアが既に取り出された凍結試料内の1つ以上の場所を検出するように適合される、試料検査システムと、
を備え、前記試料検査システムは、前記センサと前記試料の表面との間の距離を検出するように適合される飛行時間距離センサを備える、
システム。 - 前記飛行時間センサは、電磁放射線のビームを前記試料の表面の上へ放射するように適合される、電磁放射線の供給源と、前記試料の前記表面によって反射された電磁放射線を検出するように適合される、検出器と、前記供給源が前記ビームを放射した時間と、前記検出器が前記反射した電磁放射線を検出した時間との間の時間差を示す信号を出力するように適合される、プロセッサと、を備える、請求項49に記載のシステム。
- 前記飛行時間センサは、音響信号を放射するように適合される音響信号源と、前記試料の表面によって反射された前記音響信号の反響を検出するように適合される検出器と、前記音響信号が放射された時間と、前記反響が検出された時間との間の時間差を示す信号を出力するように適合されるプロセッサとを備える、請求項49に記載のシステム。
- 凍結試料のアリコートを得るためのシステムであって、
凍結試料を含む複数の容器を支持するためのプラットフォームと、
前記凍結試料の中へ移動させ、次いで、前記凍結試料から引き出すことによって、前記凍結試料から凍結試料コアを取り出すように適合されるコアリングビットを備える、試料コアリングデバイスと、
前記試料コアリングデバイスとプラットフォームとの間で相対的な動きを生じさせ、前記凍結試料から試料コアを取り出すように前記試料コアリングデバイスを動作させるように適合される、ロボットシステムと、
そこから凍結試料コアが既に取り出された凍結試料内の1つ以上の場所を検出するように適合される、試料検査システムと、
を備え、前記試料検査システムは、コアリングされた可能性のある前記試料の表面を撮像するように適合される撮像システムと、それぞれの試料の前記コアリングされた可能性のある表面の一部分だけに対応する画像を分析し、前記一部分がコアリングされたかどうかを判定するようにプログラムされるプロセッサとを備える、
システム。 - 凍結試料のアリコートを得るためのシステムであって、
凍結試料を含む複数の容器を支持するためのプラットフォームと、
前記凍結試料の中へ移動させ、次いで、前記凍結試料から引き出すことによって、前記凍結試料から凍結試料コアを取り出すように適合されるコアリングビットを備える、試料コアリングデバイスと、
前記試料コアリングデバイスとプラットフォームとの間で相対的な動きを生じさせ、前記凍結試料から試料コアを取り出すように前記試料コアリングデバイスを動作させるように適合される、ロボットシステムと、
そこから凍結試料コアが既に取り出された凍結試料内の1つ以上の場所を検出するように適合される、試料検査システムと、
を備え、前記試料検査システムは、コアリングされた可能性のある試料の表面が拡散様式で光を反射する物理的特徴を有するかどうかに関わらず、前記コアリングされた可能性のある試料の表面が特定の場所でコアリングされたかどうかを判定するように動作可能である、センサを備える、
システム。 - 前記試料検査システムは、画像分析システム、ビジョン検査システム、共焦点撮像システム、光学プロフィロメータ、飛行時間距離センサ、デジタルカメラ、およびそれらの組み合わせから成る群から選択されるセンサを備える、請求項53に記載のシステム。
- 前記試料システムは、前記凍結試料の上面の1つ以上の穴を検出するように適合される、光学変位センサを備える、請求項53に記載のシステム。
- 前記ロボットシステムは、前記試料コアリングデバイスを支持するアームを備え、前記試料検査システムは、前記アーム上に載置される、請求項49〜55のいずれか1項に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US41868810P | 2010-12-01 | 2010-12-01 | |
| US61/418,688 | 2010-12-01 | ||
| PCT/US2011/061214 WO2012074771A2 (en) | 2010-12-01 | 2011-11-17 | Apparatus and methods for aliquotting frozen samples |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016071584A Division JP2016122018A (ja) | 2010-12-01 | 2016-03-31 | 凍結試料をアリコートするための装置および方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013545105A true JP2013545105A (ja) | 2013-12-19 |
| JP2013545105A5 JP2013545105A5 (ja) | 2015-01-15 |
Family
ID=45044753
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013542034A Pending JP2013545105A (ja) | 2010-12-01 | 2011-11-17 | 凍結試料をアリコートするための装置および方法 |
| JP2016071584A Pending JP2016122018A (ja) | 2010-12-01 | 2016-03-31 | 凍結試料をアリコートするための装置および方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016071584A Pending JP2016122018A (ja) | 2010-12-01 | 2016-03-31 | 凍結試料をアリコートするための装置および方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20140335554A1 (ja) |
| EP (1) | EP2646792B1 (ja) |
| JP (2) | JP2013545105A (ja) |
| CN (1) | CN103370610B (ja) |
| AU (1) | AU2011337043A1 (ja) |
| BR (1) | BR112013013505A2 (ja) |
| CA (1) | CA2819013C (ja) |
| WO (1) | WO2012074771A2 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9032854B2 (en) | 2011-12-21 | 2015-05-19 | Sakura Finetek U.S.A., Inc. | Reciprocating microtome drive system |
| US9134202B2 (en) | 2012-01-26 | 2015-09-15 | Cryoxtract Instruments, Llc | Robotic end effector for frozen aliquotter and methods of taking a frozen aliquot from biological samples |
| US20130286192A1 (en) * | 2012-04-30 | 2013-10-31 | Cryoxtract Instruments, Llc | Machine Vision System for Frozen Aliquotter for Biological Samples |
| US20140267713A1 (en) * | 2013-03-15 | 2014-09-18 | Cryoxtract Instruments, Llc | Machine Vision System for Frozen Aliquotter for Biological Samples |
| US20210078846A1 (en) * | 2012-05-03 | 2021-03-18 | Vanrx Pharmasystems Inc. | Cover removal system for use in controlled environment enclosures |
| US20210371148A1 (en) * | 2012-05-03 | 2021-12-02 | Vanrx Pharmasystems Inc. | Cover removal system for use in controlled environment enclosures |
| CN104641213A (zh) | 2012-07-24 | 2015-05-20 | 克莱奥克斯特拉克特仪器有限责任公司 | 用于将冷冻样品等分的装置和方法 |
| FI10181U1 (fi) * | 2013-04-17 | 2013-08-14 | Konecranes Oyj | Tarttuja kuormankäsittelylaitetta varten ja nosturi |
| JP2016520831A (ja) * | 2013-05-04 | 2016-07-14 | クライオエクストラクト インストゥルメンツ, エルエルシー | 生体試料のための凍結アリコータのターゲットシステム及び方法 |
| CN103636737B (zh) * | 2013-10-24 | 2016-05-11 | 杨公明 | 一种羊胎盘及羊水现场收集与保鲜的方法 |
| CA3053184C (en) | 2017-03-09 | 2022-04-12 | Hologic, Inc. | Systems and methods for automated preparation of biological specimens |
| CN107843453B (zh) * | 2017-12-21 | 2024-01-23 | 上海泽泉科技股份有限公司 | 可调速手持低温样本分装仪 |
| WO2019245906A1 (en) * | 2018-06-20 | 2019-12-26 | Gen-Probe Incorporated | Method and apparatus for freezing dispensed droplets of liquid |
| JP2022528209A (ja) | 2019-02-17 | 2022-06-08 | ナショナル・サイエンティフィック・アンド・テクニカル・リサーチ・カウンシル-アージェンティーナ(セーオーエネイーセーエーテー) | 極低温デュワ容器内の生物学的サンプルにアクセスするためのシステム |
| CN111504691B (zh) * | 2020-05-10 | 2023-03-10 | 淮阴师范学院 | 一种便携式地理信息采集装置 |
| CN116643025B (zh) * | 2023-05-06 | 2024-04-02 | 中国地质大学(北京) | 一种用于环境地质土壤检测的检测装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0360390B2 (ja) * | 1984-09-11 | 1991-09-13 | Nittec Co Ltd | |
| JP2000304664A (ja) * | 1999-04-13 | 2000-11-02 | Inst Nuclear Energy Research Rocaec | 非均質性固体原料の試料採取方法及び装置 |
| JP2006112847A (ja) * | 2004-10-13 | 2006-04-27 | Eisai Co Ltd | 試料摘出装置 |
| US20090101738A1 (en) * | 2007-10-17 | 2009-04-23 | Max-Planck-Gesellschaft Zur Foerderung Der Wissenschaften E. V . | System and method for producing weighed portions of powder from at least one biological material at cryotemperatures |
| JP2009524021A (ja) * | 2006-01-13 | 2009-06-25 | プレジデント・アンド・フエローズ・オブ・ハーバード・カレツジ | 凍結標本の分配システム、方法及び装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6117130A (en) * | 1998-09-24 | 2000-09-12 | Abiomed, Inc. | Coring device for myocardial revascularization |
| US20040085443A1 (en) * | 2000-12-13 | 2004-05-06 | Kallioniemi Olli P | Method and system for processing regions of interest for objects comprising biological material |
| US20020129975A1 (en) * | 2001-01-17 | 2002-09-19 | Barta Ernest G. | Ice auger system |
| US6635414B2 (en) * | 2001-05-22 | 2003-10-21 | Integrated Biosystems, Inc. | Cryopreservation system with controlled dendritic freezing front velocity |
| GB0325483D0 (en) * | 2003-10-31 | 2003-12-03 | Plasmacute As | Assay |
| WO2009122999A1 (ja) * | 2008-03-31 | 2009-10-08 | シスメックス株式会社 | 試料調製装置及び試料調製方法、並びに、細胞分析装置及び細胞分析方法 |
| JP5530613B2 (ja) * | 2008-10-06 | 2014-06-25 | シスメックス株式会社 | 検体処理システム及び検体搬送システム |
| JP5203889B2 (ja) * | 2008-10-28 | 2013-06-05 | シスメックス株式会社 | 検体分析装置及び検体分析方法 |
-
2011
- 2011-11-17 CN CN201180057843.XA patent/CN103370610B/zh not_active Expired - Fee Related
- 2011-11-17 JP JP2013542034A patent/JP2013545105A/ja active Pending
- 2011-11-17 EP EP11788311.6A patent/EP2646792B1/en not_active Not-in-force
- 2011-11-17 US US13/991,103 patent/US20140335554A1/en not_active Abandoned
- 2011-11-17 WO PCT/US2011/061214 patent/WO2012074771A2/en active Application Filing
- 2011-11-17 BR BR112013013505A patent/BR112013013505A2/pt not_active Application Discontinuation
- 2011-11-17 CA CA2819013A patent/CA2819013C/en not_active Expired - Fee Related
- 2011-11-17 AU AU2011337043A patent/AU2011337043A1/en not_active Abandoned
-
2016
- 2016-03-31 JP JP2016071584A patent/JP2016122018A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0360390B2 (ja) * | 1984-09-11 | 1991-09-13 | Nittec Co Ltd | |
| JP2000304664A (ja) * | 1999-04-13 | 2000-11-02 | Inst Nuclear Energy Research Rocaec | 非均質性固体原料の試料採取方法及び装置 |
| JP2006112847A (ja) * | 2004-10-13 | 2006-04-27 | Eisai Co Ltd | 試料摘出装置 |
| JP2009524021A (ja) * | 2006-01-13 | 2009-06-25 | プレジデント・アンド・フエローズ・オブ・ハーバード・カレツジ | 凍結標本の分配システム、方法及び装置 |
| US20090101738A1 (en) * | 2007-10-17 | 2009-04-23 | Max-Planck-Gesellschaft Zur Foerderung Der Wissenschaften E. V . | System and method for producing weighed portions of powder from at least one biological material at cryotemperatures |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140335554A1 (en) | 2014-11-13 |
| CA2819013C (en) | 2020-04-14 |
| BR112013013505A2 (pt) | 2016-09-06 |
| WO2012074771A2 (en) | 2012-06-07 |
| CN103370610B (zh) | 2016-08-10 |
| AU2011337043A1 (en) | 2013-06-13 |
| EP2646792A2 (en) | 2013-10-09 |
| JP2016122018A (ja) | 2016-07-07 |
| WO2012074771A3 (en) | 2012-08-16 |
| EP2646792B1 (en) | 2019-07-10 |
| CA2819013A1 (en) | 2012-06-07 |
| CN103370610A (zh) | 2013-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016122018A (ja) | 凍結試料をアリコートするための装置および方法 | |
| McDonald | High-pressure freezing for preservation of high resolution fine structure and antigenicity for immunolabeling | |
| JP2013545105A5 (ja) | ||
| US9528916B2 (en) | Robotic end effector for frozen aliquotter and methods of taking a frozen aliquot from biological samples | |
| KR101016823B1 (ko) | 물질 저장용 저장-접근 장치 및 그 저장 시스템 | |
| JP5474080B2 (ja) | 標本担持スライドを加熱するための装置 | |
| EP2938996B1 (en) | Automated specimen processing systems and methods of using the same | |
| JP6475759B2 (ja) | 標本担持顕微鏡用スライドガラスを検出する自動標本処理システムおよび方法 | |
| CN101698823B (zh) | 基于高速伺服电机和光定位的荧光定量pcr检测系统 | |
| CN104871006B (zh) | 标本处理系统和用于均匀加热载片的方法 | |
| CA2346268A1 (en) | Continuous processing automated workstation | |
| CA2893501A1 (en) | Specimen processing systems and methods for aligning slides | |
| JP2011191207A (ja) | 試薬庫、自動分析装置及び試薬庫の温度制御プログラム | |
| JP2015527576A (ja) | 凍結試料を分取りする機器および方法 | |
| CA2946684C (en) | Automated specimen processing systems and methods | |
| US20140326083A1 (en) | Targeting Systems and Methods for Frozen Aliquotter for Biological Samples | |
| JP2010500615A (ja) | 顕微鏡スライドの装填/降荷機構 | |
| AU2019204194A1 (en) | Apparatus and methods for aliquotting frozen samples | |
| US20190225923A1 (en) | Apparatus for embryo biopsy | |
| JP3640383B2 (ja) | サンプルの支持機構 | |
| JP4840931B2 (ja) | 基板乾燥用支持体及び乾燥装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141114 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151001 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20151228 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160129 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160229 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160331 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160810 |