JP2013241277A - Sheet conveyance device - Google Patents
Sheet conveyance device Download PDFInfo
- Publication number
- JP2013241277A JP2013241277A JP2013092014A JP2013092014A JP2013241277A JP 2013241277 A JP2013241277 A JP 2013241277A JP 2013092014 A JP2013092014 A JP 2013092014A JP 2013092014 A JP2013092014 A JP 2013092014A JP 2013241277 A JP2013241277 A JP 2013241277A
- Authority
- JP
- Japan
- Prior art keywords
- sheet
- cylinder
- swing
- unit
- printing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J25/00—Actions or mechanisms not otherwise provided for
- B41J2025/008—Actions or mechanisms not otherwise provided for comprising a plurality of print heads placed around a drum
Abstract
Description
本発明は、シートを搬送するシート搬送装置に関する。 The present invention relates to a sheet conveying apparatus that conveys a sheet.
シートを搬送するシート搬送装置の一例として、シートの片面および両面に印刷を行うことができる反転機構付枚葉輪転印刷機に設けられたシート反転ユニットにおけるシート搬送装置がある(例えば、特許文献1参照)。この反転ユニットは、隣接する印刷ユニットの間に配設されシートを選択的に反転させることができ、これによりシートに片面印刷および両面印刷をすることが可能となっている。 As an example of a sheet conveying apparatus that conveys a sheet, there is a sheet conveying apparatus in a sheet reversing unit provided in a sheet-fed rotary printing press with a reversing mechanism capable of performing printing on one side and both sides of a sheet (for example, Patent Document 1). reference). The reversing unit is disposed between adjacent printing units and can selectively reverse a sheet, thereby enabling single-sided printing and double-sided printing on the sheet.
この特許文献1の反転機構付枚葉輪転印刷機では、反転ユニットが渡胴(特許文献1の第4図における図番17)と圧胴(特許文献1の第4図における図番16)とからなり、両面印刷を行う場合、渡胴によりシートの先端部をつかんだ状態で搬送されるシートの後端部を圧胴によりつかみ、当該シートの後端部を先頭として搬送するとともに当該シートの表裏を反転させることができるようになっている。
In this sheet-fed rotary printing press with a reversing mechanism of
しかしながらかかる特許文献1の反転機構付枚葉輪転印刷機では、シートのサイズを変更する場合、印刷装置を稼働させる前に圧胴を駆動させているギアの締結を断ち、圧胴のくわえ爪装置と渡胴に保持されたシートの後端部とが対向するように渡胴に対する圧胴の位相を変更した後、再度ギアを締結させるという作業を行なうため、作業者の負担や準備時間を要するという問題があった。
However, in the sheet-fed rotary printing press with a reversing mechanism disclosed in
本発明はかかる問題を解決するためになされたものであり、シートのサイズ変更に容易に対応できるシート搬送装置を提案しようとするものである。 The present invention has been made to solve such a problem, and an object of the present invention is to propose a sheet conveying apparatus that can easily cope with a change in sheet size.
かかる課題を解決するため請求項1の発明においては、シートを搬送するシート搬送装置において、シートの端部を保持して搬送する第1保持装置を有する第1搬送部と、前記第1搬送部により搬送されるシートの端部を保持して搬送する第2保持装置を有する第2搬送部と、前記第1搬送部と前記第2搬送部との間で揺動自在に支持され、一方の端部が前記第1保持装置で保持されたシートの他方の端部を保持し、当該シートの他方の端部を前記第2搬送部の前記第2保持装置へ受け渡す第3保持装置を有する第3搬送部と、シートの搬送方向長さに基づいて前記第3搬送部の揺動動作を制御する制御部とを備えるようにする。
In order to solve this problem, in the invention according to
請求項2の発明において、前記制御部は、前記第3保持装置の速度を、前記第1搬送部からシートを受け取るときに当該第1搬送部により搬送されるシートの速度と同速にし、前記第2搬送部へシートを受け渡すときに当該第2搬送部の前記第2保持装置の速度と同速にするように制御すると共に、前記第1搬送部からシートを受け取った後、前記第2搬送部へシートを受け渡すまでの間の前記第3搬送部の揺動速度をシートの搬送方向長に基づいて制御するようにする。
In the invention of
請求項3の発明において、前記第3搬送部の揺動速度を調整する調整部を備え、前記調整部は、前記第3搬送部の駆動系に設けられた差動歯車機構と当該差動歯車機構を駆動して前記第3搬送部の揺動速度を調整する調整モータとを有し、前記制御部は前記調整モータを制御するようにする。
The invention according to
請求項4の発明において、前記第3搬送部を前記第1搬送部及び第2搬送部とは独立して揺動させる揺動用モータを備え、前記制御部は、前記揺動用モータを制御するようにする。 According to a fourth aspect of the present invention, there is provided a swinging motor that swings the third transport unit independently of the first transporting unit and the second transporting unit, and the control unit controls the swinging motor. To.
請求項1の発明によれば、シートサイズが変更された場合でも、その変更されたシートの搬送方向長さに基づいて第3搬送部の揺動動作を制御することができるので、シートサイズの変更されたシートの端部が到着するタイミングに合わせて第3搬送部の揺動動作の速度を変更し、当該第3搬送部により確実にシートを保持することができる。
According to the invention of
次に、本発明の一実施の形態について図面を参照して説明する。 Next, an embodiment of the present invention will be described with reference to the drawings.
<デジタル印刷装置の構成>
図1に示すように、シート搬送装置としてのデジタル印刷装置1は、供給部としての給紙装置2、処理部としてのデジタル印刷ユニット3及び排出部としての排紙装置4を備える。
<Configuration of digital printing device>
As shown in FIG. 1, a
給紙装置2には、複数のシートS1が積載された積載台21および、その積載台21の最上段のシートS1をフィーダボードFBへ搬送するサッカー装置23が設けられている。サッカー装置23は、第1吸23aおよび第2吸23bを備え、第1吸23aおよび第2吸23bが連続供給バルブ26および間欠供給バルブ27を介して負圧源25と接続されている。
The
連続供給バルブ26および間欠供給バルブ27は、共に第1吸23aおよび第2吸23bの負圧源25からの吸引を断接するものであるが、後述するように吸引を断接するタイミングがそれぞれ異なっている。
The
フィーダボードFBのシート搬送方向先端側には、デジタル印刷ユニット3のフレーム3aに揺動自在に支持され、シートS1の一方の端部である先端(くわえ側端部)をくわえて保持する図示しないくわえ爪装置を備えたスイング装置31fが配設されている。スイング装置31fには給紙側渡し胴32が対向して配置され、その給紙側渡し胴32がフレーム3aに回転自在に支持されている。
On the front end side in the sheet conveying direction of the feeder board FB, it is supported by the
給紙側渡し胴32には、スイング装置31fのくわえ爪装置により受け渡されるシートS1の先端をくわえた状態で保持するくわえ爪装置32aが設けられている。なおデジタル印刷ユニット3では、スイング装置31fおよび給紙側渡胴32により上流側シート搬送装置を構成している。
The feeding
給紙側渡し胴32には、スイング装置31fよりもシート搬送方向下流側に第2搬送部としての印刷胴33が対接配置され、その印刷胴33がフレーム3aに回転自在に支持されている。印刷胴33は、給紙側渡し胴32のくわえ爪装置32aからシートS1の先端を受け取って保持する第2保持装置としての印刷胴くわえ爪装置33a、33b、33cと、この印刷胴くわえ爪装置33a、33b、33cに対応して設けられシートS1を支持する支持面33d、33e、33fとを備え、本実施の形態においては、印刷胴くわえ爪装置と支持面との組が3組設けられた3倍胴として構成されており、その直径も給紙側渡し胴32の3倍の直径を有している。ここで、シートS1を保持する印刷胴くわえ爪装置33a、33b、33cは円周方向に互いに120度位相をずらした状態で設けられている。
A
印刷胴33の支持面33d、33e、33fには複数の吸引用孔が形成されており、その複数の吸引用孔が負圧源と接続されている。この印刷胴33の給紙側渡し胴32との対接部分よりもシート搬送方向下流側には、当該印刷胴33の周面に対向してインクジェットノズル部34が配置されている。
A plurality of suction holes are formed in the
インクジェットノズル部34には、互いに異なる色のインキをセットした複数のインクジェットノズルヘッド34a〜34dが印刷胴33の周面に沿ってシート搬送方向に並設され、それぞれが印刷胴33の周面を指向している。インクジェットノズルヘッド34a〜34dは、印刷胴33の支持面33d、33e、33fに全面吸着されたシートS1との隙間が僅かな間隔となるよう印刷胴33に近接して配設されている。なお、印刷胴33、インクジェットノズル部34によりシート印刷装置を構成している。
In the
印刷胴33のインクジェットノズル部34よりもシート搬送方向下流側には、印刷胴33に対接配置され、シートS1に赤外線や紫外線などの光を照射して当該シートS1上に印刷されたインキを乾燥させる乾燥装置としてのインキ乾燥ランプ35が設けられている。ここで、乾燥とは熱エネルギーを与えてインキの水分を蒸発させることやインキを硬化させることを含むものであり、固化と言い換えることができる。
An ink printed on the sheet S1 by irradiating the sheet S1 with light such as infrared rays or ultraviolet rays is disposed on the downstream side of the
印刷胴33には、インクジェットノズル部34よりもシート搬送方向下流側に、第1の排紙側渡し胴36が対接配置され、その第1の排紙側渡し胴36がフレーム3aに回転自在に支持されている。第1の排紙側渡し胴36には、印刷胴33により搬送されるシートS1の先端を印刷胴くわえ爪装置33a、33b、33cから受け取って保持するくわえ爪装置36aが設けられている。
A first paper discharge
第1の排紙側渡し胴36の印刷胴33との対接部分よりもシート搬送方向下流側には、第2の排紙側渡し胴37が第1の排紙側渡し胴36と対接配置され、その第2の排紙側渡し胴37がフレーム3aに回転自在に支持されている。第2の排紙側渡し胴37には、第1の排紙側渡し胴36により搬送されるシートS1の先端を受け取って保持するくわえ爪装置37aが設けられている。
A second paper discharge
第2の排紙側渡し胴37の第1の排紙側渡し胴36との対接部分よりもシート搬送方向下流側には紙取胴38が対接配置され、その紙取胴38がフレーム3aに回転自在に支持されている。紙取胴38には、第2の排紙側渡し胴37により搬送されるシートS1の先端を受け取って保持するくわえ爪装置38aが設けられている。
A paper take-
紙取胴38の下方には、シートS1を搬送するベルトコンベア状のデリバリーベルト40が配設されている。デリバリーベルト40のシート搬送方向先端側には、デジタル印刷ユニット3によりデジタル印刷処理の施されたシートS1を積載する積載台41が設けられている。なお、紙取胴38、デリバリーベルト40、積載台41により排紙装置4を構成し、紙取胴38およびデリバリーベルト40により搬送されるシートS1の経路がシート排出経路を構成する。
Below the
第2の排紙側渡し胴37の紙取胴38との対接部分よりもシート搬送方向下流側には、第1搬送部としての反転前倍胴39が対接配置され、その反転前倍胴39がフレーム3aに回転自在に支持されている。反転前倍胴39は、第2の排紙側渡し胴37の2倍の直径を有する2倍胴であり、第2の排紙側渡し胴37により搬送されるシートS1の先端を受け取って保持する第1保持装置としてのくわえ爪装置39aが設けられている。
A pre-reverse
ここで、反転前倍胴39は、印刷胴33、第2の排紙側渡し胴37、反転スイング装置31b等とは別個独立して単独駆動される駆動モータ383(図5)と接続されている。
Here, the pre-reverse
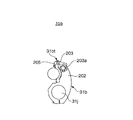
反転前倍胴39の第2の排紙側渡し胴37との対接部分よりもシート搬送方向下流側には、図2に示されるように、シートS1の他方の端部としての後端(尻側端部)を受け取って保持する第3搬送部としての反転スイング装置31bが対向して配置されている。なお、反転スイング装置31bはシートS1の表裏を反転させる反転部をも構成する。
As shown in FIG. 2, as shown in FIG. 2, the rear end (the other end portion of the sheet S <b> 1) is located downstream of the contact portion of the pre-reverse
反転スイング装置31bは、フレーム3aに回動自在に支持された反転スイング軸31jと、この反転スイング軸31jに固定されたスイングアーム202と、当該スイングアーム202の先端に固定された爪台205とを備えている。
The
また、反転スイング装置31bは、スイングアーム202の先端に回動自在に支持された回動軸203aと、当該回動軸203aに固定され爪台205と対向するスイング爪203とを備えている。スイング爪203は回動軸203aの回動により爪台205に対して開閉動作を行い、スイング爪203が閉じると当該爪台205とスイング爪203とによってシートS1を挟み付けて保持し、スイング爪203が開くと当該シートS1の保持を解放する。スイング爪203と爪台205とにより第3保持装置としてのくわえ爪装置31btが構成される。
The
反転スイング装置31bは、印刷胴33の第1の排紙側渡し胴36との対接部分よりも印刷胴33の回転方向下流側かつ給紙側渡し胴32との対接部分よりも印刷胴33の回転方向上流側において印刷胴33に対向して配置されている。そして、この反転スイング装置31bは、反転前倍胴39により搬送されるシートS1の後端を受け取る破線で示された受取位置(図1)と、印刷胴33の印刷胴くわえ爪装置33a、33b、33cにシートS1の後端を受け渡す実線で示された受渡位置(図1)との間で揺動自在にフレーム3aに支持されている。なお、第1の排紙側渡し胴36、第2の排紙側渡し胴37、反転前倍胴39、反転スイング装置31bにより搬送されるシートS1の経路がシート反転経路を構成する。
The reversing
第2の排紙側渡し胴37のくわえ爪装置37aは、紙取胴38のくわえ爪装置38aと反転前倍胴39のくわえ爪装置39aとの間で選択的にシートS1を受け渡すことが可能に駆動される。また、紙取胴38のくわえ爪装置38aは、第2の排紙側渡し胴37により搬送されるシートS1の先端を選択的に受け取ることが可能に駆動され、これらくわえ爪装置37a、38aはシートS1の搬送先を排紙装置4または反転スイング装置31bに切替える、すなわち、シートS1の搬送経路をシート排出経路またはシート反転経路に切替える搬送経路切替手段82(図5)を構成する。
The
<反転スイング装置のスイング機構>
次に、デジタル印刷ユニット3における反転スイング装置31bのスイング機構300について説明する。
<Swing mechanism of reverse swing device>
Next, the
図3および図4に示すように、スイング機構300は反転スイング装置31bを揺動させる機構であり、本機のサブフレーム3as1およびサブフレーム3as2間にベアリング302、306を介してカム軸301が回転可能に軸支され、当該カム軸301にカム304およびサブカム305が固定されている。カム軸301には、本機の駆動源により回転されるギア290と差動歯車機構としてのハーモニックドライブ(登録商標)361を介して連結されたギア303が軸着されている。図3に示されるように、カム304およびサブカム305のカム面は大径部と小径部との高低差が大きく形成されている。
As shown in FIGS. 3 and 4, the
フレーム3aの側方には、サブフレーム3aS3が設けられており、レバー軸311がフレーム3aとサブフレーム3aS3との間で回動自在に支持されている。すなわち、レバー軸311の一端はサブフレーム3aS3のベアリング335を介して回動自在に支持されており、当該レバー軸311の他端はフレーム3aのベアリング保持部338に保持されるベアリング337に回転自在に支持されている。
A subframe 3aS3 is provided on the side of the
フレーム3aには、ベアリング保持部328に保持されているベアリング31gを介して当該反転スイング装置31bのスイング軸31jが回動自在に軸支されており、当該スイング軸31jの先端にはピニオンギア31pが固定されている。
A
レバー軸311には、第1レバー313の一端がボルト314により割締め固定されている。第1レバー313の他端にはピン317aが設けられており、このピン317aにカムフォロワ317が回動自在に支持されている。第1レバー313は、カムフォロワ317がカム軸301に軸着されたカム304と対接するように配設されている。
One end of the
また、レバー軸311には、第2レバー325の一端がボルト326により割締め固定されている。第2レバー325の他端には、ピニオンギア31pと噛合するセグメントギア327が固定される。図3に示されるように、セグメントギア327は大きな半径R1で形成され、ピニオンギア31pは当該セグメントギア327の半径R1よりも格段に小さい半径R2で形成されている。ここで、ピニオンギア31pとセグメントギア327とによりラック・ピニオン機構を構成する。
One end of the
さらに、レバー軸311には、第3レバー331がベアリング336を介して回動自在に支持されている。第3レバー331の一方の端部には、ピン332aが取り付けられており、このピン332aにベアリング333を介してカムフォロワ332が回動自在に取り付けられている。第3レバー331は、カムフォロワ332がカム軸301に軸着されたサブカム305と対接するように配設されている。そして、第3レバー331の他方の端部には、両側面にそれぞれピン319a、319bが設けられたホルダ321が回動自在に支持されている。このホルダ321にはピン319a、319bの軸線と直交する方向に貫通穴321aが設けられている。
Further, a
322は第1レバー313と第3レバー331とを連結する連結部材であり、当該連結部材322のヘッド部315が第1レバー313の他端に設けられたピン316に回動自在に支持されている。ヘッド部315にはネジが形成された軸部322cが設けられており、この軸部322cは第3レバー331のホルダ321の貫通穴321aに挿通されている。
ナット316aが軸部322cのネジに螺合され、軸部322cに挿通され当該軸部322cに対して移動自在に支持されたばね受け部材322bがナット316aと第3レバー331のホルダ321との間に配設されている。ばね受け部材322bとナット316との間には付勢手段としてのばね322aが介装され、第1レバー313の他端と第3レバー331の他方の端部とを互いに離反させる方向に付勢している。このばね322aにより、第1レバー313のカムフォロワ317をカム304に押圧すると共に、第3レバー331のカムフォロワ332をサブカム305に押圧している。なお、ナット316aはばね322aのばね力を調整する付勢力調整手段として機能する。
A
カム304およびサブカム305は、第1レバー313と第3レバー331との相対的な位置関係がほとんど変わらないようにそれぞれのカム面の形状が形成されている。すなわち、図3に示されるように、第1レバー313のカムフォロワ317がカム304の小径部と対接しているときには、第3レバー331のカムフォロワ332がサブカム305の大径部と対接しており、第1レバー313のカムフォロワ317がカム304の大径部と対接しているときには、第3レバー331のカムフォロワ332がサブカム305の小径部と対接するようになっている。
The
ここで、カム304およびサブカム305、カムフォロワ317を備えた第1レバー313およびカムフォロワ332を備えた第3レバー331、付勢手段としてのばね322aを備えた連結部材322により共役カム(確動カム)を構成する。
Here, the
かかる構成に加えてスイング機構300は、本機の駆動源の駆動を反転スイング装置31bに伝達する反転スイング駆動系には、反転スイング装置31bの揺動速度を調整する調整部を備えている。この調整部は、本機の駆動源により駆動されるギア290とカム軸301に軸着されたギア303との間に設けられたハーモニックドライブ(登録商標)361と調整モータ363とを備えている。
In addition to this configuration, the
ハーモニックドライブ361は、ウェーブ・ジェネレータと呼ばれる入力軸、サーキュラ・スプラインと呼ばれる出力軸、フレクスプラインと呼ばれる制御軸の3軸を備え、入力軸がギア290に駆動連結され、出力軸がギア303に駆動連結され、制御軸が調整モータ363に駆動連結されている。ハーモニックドライブ361は、制御軸を停止させているときには出力軸が入力軸と同速で回転し、制御軸の速度を変えることにより出力軸が入力軸の回転速度に対し速度差をもって回転する公知の減速機構であり、制御軸の速度、すなわち調整モータ363の回転速度に応じて減速比を調整することができるものである。
The
<デジタル印刷装置の制御系の構成>
図3に示すように、デジタル印刷装置1は、全体を統括制御するCPU(Central processing Unit)構成でなる制御部としての制御装置81を備えている。制御装置81には、シートS1の片面だけにデジタル印刷処理を施す片面印刷モード、シートS1の表面および裏面の両面にデジタル印刷処理を施す両面印刷モードの何れかを作業者に選択させる印刷モード選択スイッチ80、給紙部2の連続供給バルブ26および間欠供給バルブ27、インクジェットノズル部34の各インクジェットノズルヘッド34a〜34d、搬送経路切替手段82、調整モータ363、駆動モータ383、シートサイズ検知部93、および印刷胴33の位相を検出する位相検出部としてのロータリエンコーダでなる位相検出センサ94が接続されている。ここで、シートサイズ検知部93は、作業者によりシートS1の搬送方向長さが入力されるシートサイズ入力装置や、自動的にシートS1の搬送方向長さを検出するシートサイズ検出器のことをいう。
<Configuration of control system of digital printing device>
As shown in FIG. 3, the
<デジタル印刷装置の印刷動作>
このように構成されたデジタル印刷装置1の印刷動作について、片面印刷モードが選択された場合と、両面印刷モードが選択された場合に分けて説明する。
<Printing operation of digital printing device>
The printing operation of the
図1に示されるように、作業者の印刷モード選択スイッチ80の操作により片面印刷モードが選択されると、制御装置81は連続供給バルブ26を作動させ、これにより第1吸23aおよび第2吸23bが積載台21のシートS1を吸着しフィーダボードFBへ搬送する。
As shown in FIG. 1, when the single-sided printing mode is selected by the operator's operation of the printing
連続供給バルブ26は、印刷胴33の1回転中に当該印刷胴33に設けられた印刷胴くわえ爪装置33a、33b、33cの数と同じ枚数のシートS1を供給するタイミング、換言すると、印刷胴33における各くわえ爪装置33a、33b、33cと給紙側渡し胴32のくわえ爪装置32aとが対向するタイミング(第1の周期)ごとに連続供給バルブ26が「開」して第1吸23aおよび第2吸23bの負圧源25からの吸引が行なわれるように制御装置81により制御される。このように、印刷胴33の全ての印刷胴くわえ爪装置33a、33b、33cがシートS1をくわえるように当該シートS1を供給することを連続給紙と呼び、連続給紙における連続供給バルブ26の開閉周期を第1の周期と呼ぶ。これにより、サッカー装置23はシートS1を第1の周期でフィーダボードFBへ搬送する。
The
フィーダボードFBにより搬送されるシートS1はその先端がスイング装置31fのくわえ爪装置によって保持された後に当該スイング装置31fの揺動により給紙側渡し胴32へ向かって搬送され、その給紙側渡し胴32のくわえ爪装置32aに当該シートS1の先端がくわえ替えされる。
After the leading end of the sheet S1 conveyed by the feeder board FB is held by the gripping claw device of the
給紙側渡し胴32の回転に伴って搬送されるシートS1は、印刷胴33との対接部分において給紙側渡し胴32のくわえ爪装置32aから印刷胴33の印刷胴くわえ爪装置33a〜33cの何れかにその先端がくわえ替えされた後、印刷胴33の回転とともに搬送される。このときシートS1の全面は、印刷胴33における複数の吸引孔を介して当該印刷胴33の支持面33d〜33fに吸着されて当該支持面33d〜33fに密着する。
The sheet S1 conveyed along with the rotation of the sheet feeding
印刷胴33により搬送されるシートS1の表面には、インクジェットノズル部34のインクジェットノズルヘッド34a〜34dから微滴化されたインクが吐出されることによりデジタル印刷処理が施される。シートS1は印刷胴33の支持面33d〜33eに密着しているため、インクジェットノズルヘッド34a〜34dとの間の微小間隔が維持された状態で搬送される。この微小間隔が維持されることにより吐出されたインクをシートS1に高精度で着弾させることができ、高品質な印刷を行うことができる。
Digital printing processing is performed on the surface of the sheet S <b> 1 conveyed by the
インクジェットノズル部34による印刷が行われたシートS1は、印刷胴33とインキ乾燥ランプ35との間を通過し、当該インキ乾燥ランプ35からの光が照射され、これによりシートS1のインキが乾燥する。その後シートS1は第1の排紙側渡し胴36へ搬送される。
The sheet S1 that has been printed by the
シートS1は、印刷胴33の支持面33d、33e、33fに密着されているため、インキ乾燥ランプ35からシートS1の全面に均一に光が照射され、むらの無いインキ乾燥が行なわれる。
Since the sheet S1 is in close contact with the support surfaces 33d, 33e, and 33f of the
図6に示すように、印刷胴33と第1の排紙側渡し胴36との対接部分において印刷胴33の印刷胴くわえ爪装置33a〜33cから第1の排紙側渡し胴36のくわえ爪装置36aにシートS1の先端がくわえ替えされる。その後、図7に示すように、第1の排紙側渡し胴36のくわえ爪装置36aに保持されたシートS1は、第1の排紙側渡し胴36と第2の排紙側渡し胴37との対接部分において、第1の排紙側渡し胴36のくわえ爪装置36aから第2の排紙側渡し胴37のくわえ爪装置37aにその先端がくわえ替えされる。
As shown in FIG. 6, in the contact portion between the
片面印刷モードの場合、制御装置81は、全てのシートS1が第2の排紙側渡胴37から紙取胴38へ受け渡されるように搬送経路切替手段82を制御する。すなわち、シートS1の先端が第2の排紙側渡し胴37と紙取胴38との対接部分に位置付けられる位相において、第2の排紙側渡し胴37のくわえ爪装置37aがシートS1の先端の保持を解除するとともに、紙取胴38のくわえ爪装置38aがシートS1の先端をくわえて保持する。これにより片面に印刷が施されたシートS1は第2の排紙側渡し胴37から紙取胴38へくわえ替えされて搬送される。
In the single-sided printing mode, the
紙取胴38のくわえ爪装置38aにくわえ替えされたシートS1は、デリバリーベルト40の上方に紙取胴38のくわえ爪装置38aが位置したタイミングで当該くわえ爪装置38aによる保持が解除され、デリバリーベルト40上に載せられる。
The sheet S1 that has been replaced by the
デリバリーベルト40上に載せられたシートS1は当該デリバリーベルト40の走行とともに搬送され、表面にデジタル印刷処理の施されたシートS1が排紙装置4の積載台41上に排出される。
The sheet S1 placed on the
一方、作業者の印刷モード選択スイッチ80の操作により両面印刷モードが選択された場合、制御装置81(図5)は反転前倍胴39が他の胴と同期して回転するよう駆動モータ383を駆動させる。この状態で制御装置81は間欠供給バルブ27を作動させ、これにより、第1吸23aおよび第2吸23bがり積載台21のシートS1を吸着しフィーダボードFBへ搬送する。
On the other hand, when the duplex printing mode is selected by the operator's operation of the printing
間欠供給バルブ27は、連続供給のタイミングに対して1枚おきのタイミングでシートS1を供給するタイミング(第1の周期の2倍の周期となる第2の周期)、換言すると、印刷胴33における各くわえ爪装置33a、33b、33cと給紙側渡し胴32のくわえ爪装置32aとが対向するタイミングで、バルブが「開」、「閉」、「開」、「閉」、…、となるように制御装置81により制御される。これは、連続給紙の周期の2倍の周期である。このように、印刷胴33の印刷胴くわえ爪装置33a、33b、33cが一つおきにシートS1をくわえるように当該シートS1を供給することを間欠給紙と呼び、間欠給紙における間欠供給バルブ27の開閉周期を第2の周期と呼ぶ。これにより、サッカー装置23はシートS1を第2の周期で1枚おきに間欠的に吸着しフィーダボードFBへ搬送する。
The
サッカー装置23によりフィーダボードFBへ送り出されたシートS1は、片面印刷モードの場合と同様にスイング装置31fおよび給紙側渡し胴32を介して印刷胴33に受け渡されるが、シートS1は間欠給紙のタイミングで送り出されているため、印刷胴33の印刷胴くわえ爪装置33a〜33cは一つおきに給紙側渡し胴32から搬送される新規なシートS1を受取る。
The sheet S1 sent to the feeder board FB by the
その後、シートS1はインクジェットノズル部34に搬送され、その一方の面(表面)に表面用の印刷が施される。ここで、制御装置81は、位相検出センサ94からの検出信号に基づいて、印刷胴33の印刷胴くわえ爪装置33a〜33cの一つおきに保持された新規なシートS1に対して印刷を施し、シートS1を保持していない印刷胴くわえ爪装置33a〜33cの支持面33d〜33fに対して印刷を行なわないようにインクジェットノズル部34の各インクジェットノズルヘッド34a〜34dを制御する。
Thereafter, the sheet S1 is conveyed to the
両面印刷モードの場合には、制御装置81は、インクジェットノズル部34により表面に印刷が施されたシートS1が、第2の排紙側渡し胴37から紙取胴38へ受け渡されずに、反転前倍胴39に受け渡されるように、搬送経路切替手段82を制御する。
In the double-sided printing mode, the
すなわち、両面印刷モードの場合においては、表面に印刷が施されているが他方の面(裏面)にはデジタル印刷処理されていないシートS1が第2の排紙側渡し胴37と紙取胴38との対接部分に位置付けられる位相において、第2の排紙側渡し胴37のくわえ爪装置37aの爪は開かずに閉じたままの状態、すなわちシートS1の先端を保持した状態が維持されるとともに、紙取胴38のくわえ爪装置38aの爪は閉じずに開いた状態が維持される。
That is, in the case of the duplex printing mode, the sheet S1 that has been printed on the front surface but not digitally printed on the other surface (back surface) is the second discharge
これにより表面のみに印刷が施されたシートS1は第2の排紙側渡し胴37から紙取胴38へくわえ替えされることなく反転前倍胴39へ搬送される。すなわち、第2の排紙側渡し胴37と反転前倍胴39との対接部分において反転前倍胴39くわえ爪装置39aの爪を閉じてシートS1の先端を保持させるとともに、第2の排紙側渡し胴37のくわえ爪装置37aの爪を開いてシートS1の先端の保持を解除し、図8に示すように、第2の排紙側渡し胴37のくわえ爪装置37aから反転前倍胴39のくわえ爪装置39aにシートS1の先端をくわえ替えさせる。
As a result, the sheet S1 printed only on the front surface is conveyed from the second paper discharge
図9に示すように、反転前倍胴39の回転とともに搬送されるシートS1は、反転スイング装置31bが実線で示される受渡位置から破線で示される受取位置に揺動し、シートS1の後端(紙尻側端部)を当該反転スイング装置31bの反転くわえ爪装置31btにより保持すると同時に、反転前倍胴39のくわえ爪装置39aによるシートS1の先端に対する保持を解除する。これにより、反転前倍胴39から反転スイング装置31bにシートS1の後端がくわえ替えされる。
As shown in FIG. 9, the sheet S1 conveyed along with the rotation of the pre-reversing
その後、図9に示すように、反転スイング装置31bは破線で示す受取位置から実線で示す受渡位置へ揺動し、これによりシートS1はその後端を先頭にして印刷胴33に向けて搬送され、反転スイング装置31bのくわえ爪装置31btから印刷胴33の印刷胴くわえ爪装置33a〜33cの何れかにシートS1の後端がくわえ替えされる。
Thereafter, as shown in FIG. 9, the
図3に示されるように、反転スイング装置31bの受取位置と受渡位置との間の揺動角(振れ角)θ2は大きく、この大きな振れ角θ2を得るために本実施の形態では共役カムとラック・ピニオン機構を組合せたスイング機構300が用いられている。すなわち、図3および図4に示されたように、スイング機構300では、本機の駆動源により回転されるギア290およびハーモニックドライブ361を介してギア303が回転されると、カム軸301を介してカム304及びサブカム305が回転する。
As shown in FIG. 3, the swing angle (swing angle) θ2 between the receiving position and the delivery position of the reversing
カム304のカム面には第1レバー313のカムフォロワ317が当接されると同時に、サブカム305のカム面には第3レバー331のカムフォロワ332が当接されているので、カム304の回転により、第1レバー313はカムフォロワ317を介してカム304のカム面の形状にしたがって揺動する。第1レバー313の揺動によりレバー軸311が回動し、当該レバー軸311に固定されている第2レバー325がセグメントギア327を伴って揺動角(振れ角)θ1で揺動する。
The
第1レバー313が揺動している間、第3レバー331はカムフォロワ332を介してサブカム305のカム面の形状にしたがって揺動する。第1レバー313のカムフォロワ317および第3レバー331のカムフォロワ332はばね322aによりカム304およびサブカム305のカム面に押圧されている。すなわち、ばね322aによりばね受け部材322bが第3レバー331のホルダ321を押圧し、当該第3レバー331をカムフォロワ332がサブカム305のカム面を押圧する方向に付勢し、さらに、ばね322aによりナット316aが螺合した連結部材322を介して第1レバー313をカムフォロワ317がカム304のカム面を押圧する方向に付勢するのである。
While the
このとき、カム304およびサブカム305により、第1レバー313と第3レバー331との相対的な位置関係がほとんど変わらないため、ばね322aによる付勢力をほぼ一定とすることができ、高低差の大きいカム304およびサブカム305のカム面に対する第1レバー313のカムフォロワ317および第3レバー331のカムフォロワ332の押圧力を常に一定に保つことができる。したがって、カム飛びを起こすことなくセグメントギア327を大きな揺動角(振れ角)θ1で確実に揺動させることができるのである。
At this time, since the relative positional relationship between the
第2レバー325のセグメントギア327が揺動角(振れ角)θ1で揺動すると、ピニオンギア31pを介してスイング軸31jが回動し、これにより反転スイング装置31bが揺動する。
When the
この場合、反転スイング装置31bは、大きな半径R1で形成された第2レバー325のセグメントギア327が、その第2レバー325の回転半径R1よりも格段に小さな半径R2のピニオンギア31pと噛合されているので、第2レバー325の揺動角(振れ角)θ1を例えば4倍に拡大した一段と大きな揺動角(振れ角)θ2でくわえ爪装置31btを揺動させることができる。
In this case, in the
これにより、反転前倍胴39と印刷胴33との間隔が広く、すなわち反転前倍胴39から印刷胴33までの距離が長い場合であっても、スイング機構300の共役カムにより大きな高低差のカム304を使用してカム飛びすることなく第2レバー325のセグメントギア327の大きな揺動角(振れ角)θ1を得ることができ、さらに、大きな半径R1の第2レバー325のセグメントギア327と小さな半径R2のピニオンギア31pとの組合せによるラック・ピニオン機構により、セグメントギア327の大きな揺動角(振れ角)θ1をさらに大きな揺動角(振れ角)θ2に変換することができるので、当該くわえ爪装置31btによるシートS1の搬送距離が伸び、かくして、反転前倍胴39から反転スイング装置31bを介してシートS1の後端を印刷胴33へ受け渡すことができる。
Thereby, even when the distance between the pre-reversal
ここで、印刷胴33の印刷胴くわえ爪装置33a〜33cは給紙側渡し胴32から搬送される新規なシートS1を一つおきに保持しているのであるが、反転スイング装置31bは新規なシートS1を保持していない印刷胴くわえ爪装置33a〜33cと対向するタイミングで受渡位置へ位置付けられ、反転スイング装置31bのくわえ爪装置31btからシートS1の後端を印刷胴くわえ爪装置33a〜33cへ受け渡す。これにより、印刷胴33の印刷胴くわえ爪装置33a〜33cには、給紙側渡し胴32から受け渡された新規なシートS1と反転スイング装置31bのくわえ爪装置31btから受け渡されたシートS1とが交互に保持され、インクジェットノズル部34へ搬送される。
Here, the printing cylinder holding
このとき反転スイング装置31bのくわえ爪装置31btから受け渡されたシートS1は、インクジェットノズル部34により既にデジタル印刷処理の施された表面(デジタル印刷処理済みの面)が印刷胴33の支持面33d、33e、33fと対接し、シートS1の裏面(デジタル印刷未処理の面)が露出した状態で、シートS1の後端が印刷胴33の印刷胴くわえ爪装置33a〜33cにより保持された状態のまま搬送され、すなわちシートS1が表裏反転して搬送されインクジェットノズル部34によりシートS1の裏面にデジタル印刷処理が施される。
At this time, the sheet S1 delivered from the gripping claw device 31bt of the reversing
ここで、反転スイング装置31bのくわえ爪装置31btから受け渡された表裏反転状態のシートS1に対しては裏面用の印刷が施され、印刷胴33のくわえ爪装置33a〜33cのひとつおきに保持された新規なシートS1に対しては表面用の印刷が施されるようにインクジェットノズル部34の各インクジェットノズルヘッド34a〜34dが制御される。これにより、インクジェットノズルヘッド34a〜34dは、印刷胴33に交互に保持された新規なシートS1と表裏反転状態のシートS1に対応して表面用の印刷と裏面用の印刷を交互に行うことになる。
Here, the reverse side sheet S1 delivered from the gripping claw device 31bt of the reversing
その後、裏面に裏面用の印刷が施されたシートS1は、片面印刷モードの場合と同様に、第1の排出側渡し胴36、第2の排紙側渡し胴37、紙取胴38を順次介してデリバリーベルト40から排紙装置4の積載台41へ排出される。
Thereafter, the sheet S1 printed on the back side is printed on the first discharge
次に、スイング機構300に設けられたハーモニックドライブ361の作用について説明する。作業者が印刷モード選択スイッチ80を介して両面印刷モードを選択すると、制御装置81は、例えば作業者によりシートサイズ検知部93に入力されたシートS1の搬送方向長さに基づき調整モータ363の回転速度を算出する。
Next, the operation of the
制御装置81が、シートサイズ検知部93からシートS1の搬送方向長さに基づいて算出された回転速度となるよう調整モータ363を駆動すると、カム304およびサブカム305の回転速度が増速または減速される。
When the
その結果、カム304により第1レバー313のスイング速度ひいては第2レバー325のスイング速度が増速又は減速するので、第2レバー325を介して反転スイング装置31bのくわえ爪装置31btを高速でスイング動作させたり、或いは低速でスイング動作させることができる。
As a result, the swing speed of the
ここで、制御装置81による調整モータ363の制御を説明する。先ず、制御装置81にはシートS1の基準となる搬送方向長さ(基準長さ)が設定されており、この基準長さのシートS1を搬送するときには調整モータ363を駆動させずに停止させておく。これによりカム304及びサブカム305は減速及び増速されずに基準速度で回転する。
Here, the control of the
カム304及びサブカム305が基準速度で回転することにより、反転スイング装置31bのくわえ爪装置31btが反転前倍胴39からシートS1の後端をくわえるときには、当該くわえ爪装置31btがシートS1の搬送速度すなわち反転前倍胴39の周速と同じ速度で揺動させ、印刷胴33の印刷胴くわえ爪装置33a〜33cへシートS1をくわえ替えするときには、印刷胴くわえ爪装置33a〜33cの走行速度すなわち印刷胴33の周速と同じ速度で揺動する。シートS1の受取り/受渡しの際に相手側胴との速度差が無くなりシートS1の確実かつ正確な受取り/受渡しを行なうことができるのである。
When the gripping claw device 31bt of the reversing
もちろん、反転スイング装置31bのくわえ爪装置31btが反転前倍胴39からシートS1の後端をくわえるためには、反転前倍胴39上のシートS1の後端と反転スイング装置31bのくわえ爪装置31btとが対向していなければならず、印刷胴33の印刷胴くわえ爪装置33a〜33cへシートS1をくわえ替えさせるためには、当該印刷胴くわえ爪装置33a〜33cと反転スイング装置31bのくわえ爪装置31btとが対向していなければならない。シートS1の搬送方向長さが基準長さのときには、調整モータ363を停止させて、カム304及びサブカム305の基準速度で回転させることにより、反転スイング装置31bのくわえ爪装置31btがシートS1の受取り/受渡しに必要な位置に位置付けられるのである。
Of course, in order for the holding claw device 31bt of the
ここで、シートS1の搬送方向長さが基準長さと異なる場合は、反転前倍胴39上のシートS1の後端の位置が基準長さのシートS1と異なるため、シートS1の受取りタイミングを調整しなければならず、さらに、シートS1の受取りタイミングの調整に伴いシートS1を受取ってから当該シートS1を印刷胴33へ受け渡すまでのタイミングも調整しなければならない。
Here, when the conveyance direction length of the sheet S1 is different from the reference length, the position of the rear end of the sheet S1 on the pre-inversion
シートS1の搬送方向長さが基準長さよりも短い場合は、反転前倍胴39からシートS1を受取る場合、基準長さよりも短いシートS1の後端は基準長さのシートS1の後端よりも早く受取位置に到達するため、反転スイング装置31bのくわえ爪装置31btは基準長さのシートS1の場合よりも早く当該受取り位置に位置付けられていなければならない。その際、制御装置81はシートS1の搬送方向長さに基づいて算出された回転速度で調整モータ363を駆動し、ハーモニックドライブ361を介してカム304及びサブカム305の回転速度を調整して反転スイング装置31bのくわえ爪装置31btのスイング動作速度を速くする。これにより、反転スイング装置31bのくわえ爪装置31btが基準長さよりも短いシートS1の後端と対向することができる。さらに、制御装置81は反転スイング装置31bのくわえ爪装置31btがシートS1の後端をくわえるときには、調整モータ363の駆動を停止させ、当該くわえ爪装置31btの速度を反転前倍胴39の周速と同速にさせる。これによりシートS1の後端を確実かつ正確にくわえることができる。
When the length of the sheet S1 in the conveyance direction is shorter than the reference length, when the sheet S1 is received from the pre-inversion
そして、搬送方向長さが基準長さよりも短いシートS1を受取るために、反転スイング装置31bのくわえ爪装置31btを基準長さのシートS1の場合よりも早く当該受取り位置に位置付けたので、シートS1を印刷胴33へシートS1を受渡すときには、反転スイング装置31bのくわえ爪装置31btは基準長さのシートS1の場合よりも遅く印刷胴33への受渡位置に位置付けなければ、当該印刷胴33の印刷胴くわえ爪装置33a〜33cと対向することができない。その際、制御装置81はシートS1の搬送方向長さに基づいて算出された回転速度で調整モータ363を駆動し、ハーモニックドライブ361を介してカム304及びサブカム305の回転速度を調整して反転スイング装置31bのくわえ爪装置31btのスイング動作速度を遅くする。これにより、反転スイング装置31bのくわえ爪装置31btが印刷胴33の印刷胴くわえ爪装置33a〜33cと対向することができる。さらに、制御装置81は反転スイング装置31bのくわえ爪装置31btが印刷胴くわえ爪装置33a〜33cへシートS1をくわえ替えさせるときには、調整モータ363の駆動を停止させ、当該くわえ爪装置31btの速度を印刷胴33の周速と同速にさせる。これによりシートS1の後端を確実かつ正確にくわえることができる。
Then, in order to receive the sheet S1 whose length in the transport direction is shorter than the reference length, the gripping claw device 31bt of the reversing
一方、シートS1の搬送方向長さが基準長さよりも長い場合は、反転前倍胴39からシートS1を受取る場合、基準長さよりも長いシートS1の後端は基準長さのシートS1の後端よりも遅く受取位置に到達するため、反転スイング装置31bのくわえ爪装置31btは基準長さのシートS1の場合よりも遅く当該受取り位置に位置付けられていなければならない。その際、制御装置81はシートS1の搬送方向長さに基づいて算出された回転速度で調整モータ363を駆動し、ハーモニックドライブ361を介してカム304及びサブカム305の回転速度を調整して反転スイング装置31bのくわえ爪装置31btのスイング動作速度を遅くする。これにより、反転スイング装置31bのくわえ爪装置31btが基準長さよりも長いシートS1の後端と対向することができる。さらに、制御装置81は反転スイング装置31bのくわえ爪装置31btがシートS1の後端をくわえるときには、調整モータ363の駆動を停止させ、当該くわえ爪装置31btの速度を反転前倍胴39の周速と同速にさせる。これによりシートS1の後端を確実かつ正確にくわえることができる。
On the other hand, when the conveyance direction length of the sheet S1 is longer than the reference length, when the sheet S1 is received from the pre-inversion
そして、搬送方向長さが基準長さよりも長いシートS1を受取るために、反転スイング装置31bのくわえ爪装置31btを基準長さのシートS1の場合よりも遅く当該受取り位置に位置付けたので、シートS1を印刷胴33へシートS1を受渡すときには、反転スイング装置31bのくわえ爪装置31btは基準長さのシートS1の場合よりも早く印刷胴33への受渡位置に位置付けなければ、当該印刷胴33の印刷胴くわえ爪装置33a〜33cと対向することができない。その際、制御装置81はシートS1の搬送方向長さに基づいて算出された回転速度で調整モータ363を駆動し、ハーモニックドライブ361を介してカム304及びサブカム305の回転速度を調整して反転スイング装置31bのくわえ爪装置31btのスイング動作速度を早くする。これにより、反転スイング装置31bのくわえ爪装置31btが印刷胴33の印刷胴くわえ爪装置33a〜33cと対向することができる。さらに、制御装置81は反転スイング装置31bのくわえ爪装置31btが印刷胴くわえ爪装置33a〜33cへシートS1をくわえ替えさせるときには、調整モータ363の駆動を停止させ、くわえ爪装置31btの速度を印刷胴33の周速と同速にさせる。これによりシートS1の後端を確実かつ正確にくわえることができる。
Then, in order to receive the sheet S1 whose length in the transport direction is longer than the reference length, the gripping claw device 31bt of the reversing
このように、制御装置81は、シートS1の搬送方向長さが基準長さと異なる場合は、反転スイング装置31bのくわえ爪装置31btの速度を、反転前倍胴39へ向かうときには基準速度に対して増速或いは減速させ、反転前倍胴39からシートS1の後端を受取るときには基準速度にし、印刷胴33へ向かうときには基準速度に対して減速或いは増速させ、印刷胴33へシートS1を受け渡すときには基準速度にするように、調整モータ363を制御するのである。
As described above, when the length in the conveyance direction of the sheet S1 is different from the reference length, the
このようにスイング機構300は、ギア290とギア303の間にハーモニックドライブ361及び調整モータ363を介在させるだけの簡易な構成により、デジタル印刷ユニット3の構成自体を変更させることのないまま、反転スイング装置31bのくわえ爪装置31btのスイング動作速度を調整することができるので、シートS1のシート搬送方向長さが基準長さよりも長い場合または短い場合であっても、確実かつ正確にシートS1の受取り/受渡しを行うことができ、シートS1の表裏を反転をさせることができるのである。
As described above, the
<他の実施の形態>
なお、上述した実施の形態においては、制御装置81が調整部としての調整モータ363及び差動歯車機構361を介してカム軸301の回転位相を調整するようにした場合について述べたが、本発明はこれに限らず、揺動用モータとしての単独のサーボモータ(図示せず)を反転スイング装置31bのスイング軸31Jに直接駆動連結して、カム304及びサブカム305およびハーモニックドライブ361を用いずに反転スイング装置31bを揺動させる構成とし、制御装置81が単独のサーボモータ(図示せず)を制御して反転スイング装置31bのスイング軸31Jを揺動させるようにしても良い。
<Other embodiments>
In the above-described embodiment, a case has been described in which the
また、上述した実施の形態においては、制御装置81が調整モータ363及び差動歯車機構361を介してカム軸301の回転位相を調整するようにした場合について述べたが、本発明はこれに限らず、例えば図11に示すように、揺動用モータとしてのモータ371をカム軸301に直接駆動連結して、ハーモニックドライブ361を用いずにカム軸301を回動させる構成とし、制御装置81がモータ371を制御してカム軸301の回動を行なわせるようにしても良い。
In the above-described embodiment, the case where the
さらに、上述した実施の形態においては、カム304及びサブカム305により構築した共役カムを用いるようにした場合について述べたが、本発明はこれに限らず、共役カムを用いた場合と同様の角度範囲を得ることができるのであれば、サブカム305を用いることなくカム304だけで第2レバー325を揺動させたり、或いはエアーシリンダにより第2レバー325を揺動させるようにしても良い。
Furthermore, in the above-described embodiment, the case where the conjugate cam constructed by the
さらに、上述した実施の形態においては、3倍胴でなる印刷胴33を用いるようにした場合について述べたが、本発明はこれに限らず、2倍胴、4倍胴、6倍胴等でなる印刷胴を用いるようにしてもよい。
Further, in the above-described embodiment, the case where the
1…デジタル印刷装置(シート搬送装置)、2…給紙装置、3…デジタル印刷ユニット、4…排紙装置、21、41…積載台、23…サッカー装置、25…負圧源、26…連続供給バルブ、27…間欠供給バルブ、31b…反転スイング装置(第3搬送部)、31bt…くわえ爪装置(第3保持装置)、31f…スイング装置、32…給紙側渡し胴、33…印刷胴(第2搬送部)、33a〜33c…印刷胴くわえ爪装置(第2保持装置)、34…インクジェットノズル部、35…インキ乾燥ランプ、36…第1の排紙側渡し胴、37…第2の排紙側渡し胴、38…紙取胴、39…反転前倍胴(第1搬送部)、39a…くわえ爪装置(第1保持装置)、40…デリバリーベルト、FB…フィーダボード、S1…シート、80…印刷モード選択スイッチ、81…制御装置(制御部)、82…搬送経路切替手段、93…シートサイズ検知部、94…位相検出センサ、300…スイング機構、301…カム軸、302、306、315、317、320、333、335、336、337…ベアリング、304…カム、305…サブカム、311…レバー軸、317、322…連結部材、332…カムフォロワ、325…第2レバー、327…セグメントギア、331…第3レバー、203…爪、205…爪台、361…ハーモニックドライブ(調整部)、371…モータ、363…調整モータ(調整部)、383…駆動モータ。
DESCRIPTION OF
Claims (4)
シートの端部を保持して搬送する第1保持装置を有する第1搬送部と、
前記第1搬送部により搬送されるシートの端部を保持して搬送する第2保持装置を有する第2搬送部と、
前記第1搬送部と前記第2搬送部との間で揺動自在に支持され、一方の端部が前記第1保持装置で保持されたシートの他方の端部を保持し、当該シートの他方の端部を前記第2搬送部の前記第2保持装置へ受け渡す第3保持装置を有する第3搬送部と、
シートの搬送方向長さに基づいて前記第3搬送部の揺動動作を制御する制御部と
を備えることを特徴とするシート搬送装置。 In a sheet conveying apparatus that conveys a sheet,
A first conveying unit having a first holding device that holds and conveys the edge of the sheet;
A second transport unit having a second holding device for transporting while holding an end of the sheet transported by the first transport unit;
The first conveyance unit and the second conveyance unit are swingably supported, and one end holds the other end of the sheet held by the first holding device, and the other end of the sheet A third conveying unit having a third holding device that delivers the end of the second conveying unit to the second holding device of the second conveying unit;
And a control unit that controls a swinging operation of the third conveyance unit based on a length in the conveyance direction of the sheet.
前記第3保持装置の速度を、
前記第1搬送部からシートを受け取るときに当該第1搬送部により搬送されるシートの速度と同速にし、
前記第2搬送部へシートを受け渡すときに当該第2搬送部の前記第2保持装置の速度と同速にするように制御すると共に、
前記第1搬送部からシートを受け取った後、前記第2搬送部へシートを受け渡すまでの間の前記第3搬送部の揺動速度をシートの搬送方向長に基づいて制御する
ことを特徴とする請求項1に記載のシート搬送装置。 The controller is
The speed of the third holding device,
When receiving a sheet from the first transport unit, the same speed as the sheet transported by the first transport unit,
When delivering a sheet to the second transport unit, the second transport unit is controlled to have the same speed as the second holding device, and
The swing speed of the third transport unit from when the sheet is received from the first transport unit to when the sheet is delivered to the second transport unit is controlled based on the length of the sheet in the transport direction. The sheet conveying apparatus according to claim 1.
前記調整部は、前記第3搬送部の駆動系に設けられた差動歯車機構と当該差動歯車機構を駆動して前記第3搬送部の揺動速度を調整する調整モータとを有し、
前記制御部は前記調整モータを制御する
ことを特徴とする請求項2に記載のシート搬送装置。 An adjustment unit for adjusting the swing speed of the third transport unit;
The adjustment unit includes a differential gear mechanism provided in a drive system of the third transport unit, and an adjustment motor that drives the differential gear mechanism to adjust the swing speed of the third transport unit,
The sheet conveying apparatus according to claim 2, wherein the control unit controls the adjustment motor.
前記制御部は、前記揺動用モータを制御する
ことを特徴とする請求項2に記載のシート搬送装置。 A swing motor for swinging the third transport unit independently of the first transport unit and the second transport unit;
The sheet conveying apparatus according to claim 2, wherein the control unit controls the swing motor.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013092014A JP2013241277A (en) | 2012-04-27 | 2013-04-25 | Sheet conveyance device |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012102321 | 2012-04-27 | ||
| JP2012102321 | 2012-04-27 | ||
| JP2013092014A JP2013241277A (en) | 2012-04-27 | 2013-04-25 | Sheet conveyance device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013241277A true JP2013241277A (en) | 2013-12-05 |
| JP2013241277A5 JP2013241277A5 (en) | 2016-05-19 |
Family
ID=49842596
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013092014A Pending JP2013241277A (en) | 2012-04-27 | 2013-04-25 | Sheet conveyance device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013241277A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016129964A (en) * | 2015-01-14 | 2016-07-21 | 株式会社小森コーポレーション | Sheet carrying device |
| CN109626043A (en) * | 2019-01-31 | 2019-04-16 | 晋江海纳机械有限公司 | A kind of speed-changing conveying device and delivery method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5234802A (en) * | 1975-07-24 | 1977-03-17 | Cigardi Omc Sa | Invertor for singleedouble side multi color offset printing machine |
| JPH058379A (en) * | 1991-06-28 | 1993-01-19 | Komori Corp | Optimum tension processor in printing press |
| JP2003103753A (en) * | 2001-10-01 | 2003-04-09 | Shinohara Tekkosho:Kk | Satellite type printing press |
-
2013
- 2013-04-25 JP JP2013092014A patent/JP2013241277A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5234802A (en) * | 1975-07-24 | 1977-03-17 | Cigardi Omc Sa | Invertor for singleedouble side multi color offset printing machine |
| JPH058379A (en) * | 1991-06-28 | 1993-01-19 | Komori Corp | Optimum tension processor in printing press |
| JP2003103753A (en) * | 2001-10-01 | 2003-04-09 | Shinohara Tekkosho:Kk | Satellite type printing press |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016129964A (en) * | 2015-01-14 | 2016-07-21 | 株式会社小森コーポレーション | Sheet carrying device |
| CN109626043A (en) * | 2019-01-31 | 2019-04-16 | 晋江海纳机械有限公司 | A kind of speed-changing conveying device and delivery method |
| CN109626043B (en) * | 2019-01-31 | 2024-04-09 | 晋江海纳机械有限公司 | Variable speed conveying device and conveying method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6030979B2 (en) | Sheet transport device | |
| JP6224919B2 (en) | Sheet processing device | |
| JP6002622B2 (en) | Transport device | |
| JP6584255B2 (en) | Sheet feeding device | |
| JP6178598B2 (en) | Printing device | |
| US8899584B2 (en) | Sheet reversing device | |
| JP2013240997A (en) | Conveying device | |
| JP2013248879A (en) | Digital sheet printing apparatus | |
| JP2013241277A (en) | Sheet conveyance device | |
| JP2013240989A (en) | Liquid transfer device | |
| JP2014168962A (en) | Printing apparatus | |
| JP6202425B2 (en) | Sheet digital printing machine | |
| JP2013241274A (en) | Swing device | |
| JP2013241275A (en) | Sheet processor | |
| JP6104690B2 (en) | Inverted sheet processing device | |
| JP6133108B2 (en) | Sheet feeding device | |
| CN109311612B (en) | Printing device | |
| JP2013241276A (en) | Sheet digital printer | |
| JP2016129964A (en) | Sheet carrying device | |
| JP2013241267A (en) | Conveyance device | |
| JP6208973B2 (en) | Sheet digital printing machine | |
| JP6067464B2 (en) | Sheet processing device | |
| JP2013241002A (en) | Sheet digital printing apparatus | |
| JP2024013368A (en) | sheet processing equipment | |
| JP2013249205A (en) | Printing apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160325 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170207 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170331 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170912 |