JP2013181794A - 監視装置及び監視方法 - Google Patents
監視装置及び監視方法 Download PDFInfo
- Publication number
- JP2013181794A JP2013181794A JP2012044820A JP2012044820A JP2013181794A JP 2013181794 A JP2013181794 A JP 2013181794A JP 2012044820 A JP2012044820 A JP 2012044820A JP 2012044820 A JP2012044820 A JP 2012044820A JP 2013181794 A JP2013181794 A JP 2013181794A
- Authority
- JP
- Japan
- Prior art keywords
- light
- detection element
- incident
- position detection
- receiving surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Optical Radar Systems And Details Thereof (AREA)
Abstract
【解決手段】監視装置10は、物体を撮像する撮像素子24と、光が入射する受光面、及び受光面の辺に設けられ、光の入射位置までの抵抗長に応じた信号を出力する複数の出力端子34X1,34X2,34Y1,34Y2を有する位置検出素子26と、物体に反射した光が入射され、該光を撮像素子24及び位置検出素子26へ送光するミラー28Aとを備える。そして、監視装置10は、図心位置算出部30によって、位置検出素子26が有する複数の出力端子34X1,34X2,34Y1,34Y2から出力された電流に基づいて、位置検出素子26に入射した光の受光面における図心位置を算出する。
【選択図】図1
Description
このような監視装置として、特許文献1には、パルス状の光を出射する送光手段と、送光手段から出射された前記光が物体に到達し、物体により反射された反射光が到達するタイミングに合わせてシャッタを開き、取り込んだ反射光を画像信号に変換して出力する撮像手段と、撮像手段から出力される画像信号を所定期間に渡って蓄積し、蓄積した複数の画像信号を重畳した重畳信号を出力する画像処理手段と、を具備する監視装置が記載されている。
このため、特許文献1に記載の監視装置は、物体を特定する処理や物体の位置を特定する処理等の複雑な画像処理を行うための情報処理装置等の機材を必要とする。さらに、このような画像処理の結果を用いて旋回台の制御等が行われるため、監視する物体に対する追尾が遅れる場合があった。
撮像素子は、CCDイメージセンサやCMOS(Complementary Metal Oxide Semiconductor)イメージセンサ等のように、複数の受光素子が2次元状に配列されたセンサである。撮像素子は、鮮明な画像を取得できるが、物体の位置を特定するための画像処理を必要とし、画像処理を行うための情報処理装置等の機材を必要とする。さらに、画像処理の結果を用いて旋回台の制御等が行われるため、監視する物体に対する追尾が遅れる場合があった。
位置検出素子は、単一の受光素子であって、受光面が例えば四角形をしており、各辺に出力端子が設けられている。出力端子からは、光の入射位置までの抵抗長に応じた信号として例えば電流が出力される。物体の追尾を行う場合、入射光送光手段が、物体に反射した光を位置検出素子へ送光し、算出手段が、複数の出力端子から出力される複数の信号に基づいて、入射した光の受光面における図心位置を算出する。算出した図心位置は、すなわち物体の位置を示しており、複数の信号に基づいて簡易に算出できるので、本構成は、複雑な画像処理を必要とせず、簡易かつ迅速に物体の位置を特定できる。
そして、算出した図心位置が位置検出素子の受光面の所定位置(例えば中心位置)となるように、例えば位置検出素子が設けられた筐体を旋回装置が旋回させて物体を追尾する。
従って、本構成は、簡易な構成で物体の確実な追尾を可能とする。
本構成は、物体以外でレーザ光が強く反射し、監視する物体とその他の物体との判別がレーザ光では困難となっても、ガイド光が監視する物体に照射され、ガイド光によって物体を監視することとなるので、監視する物体をより確実に追尾できる。
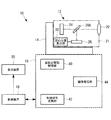
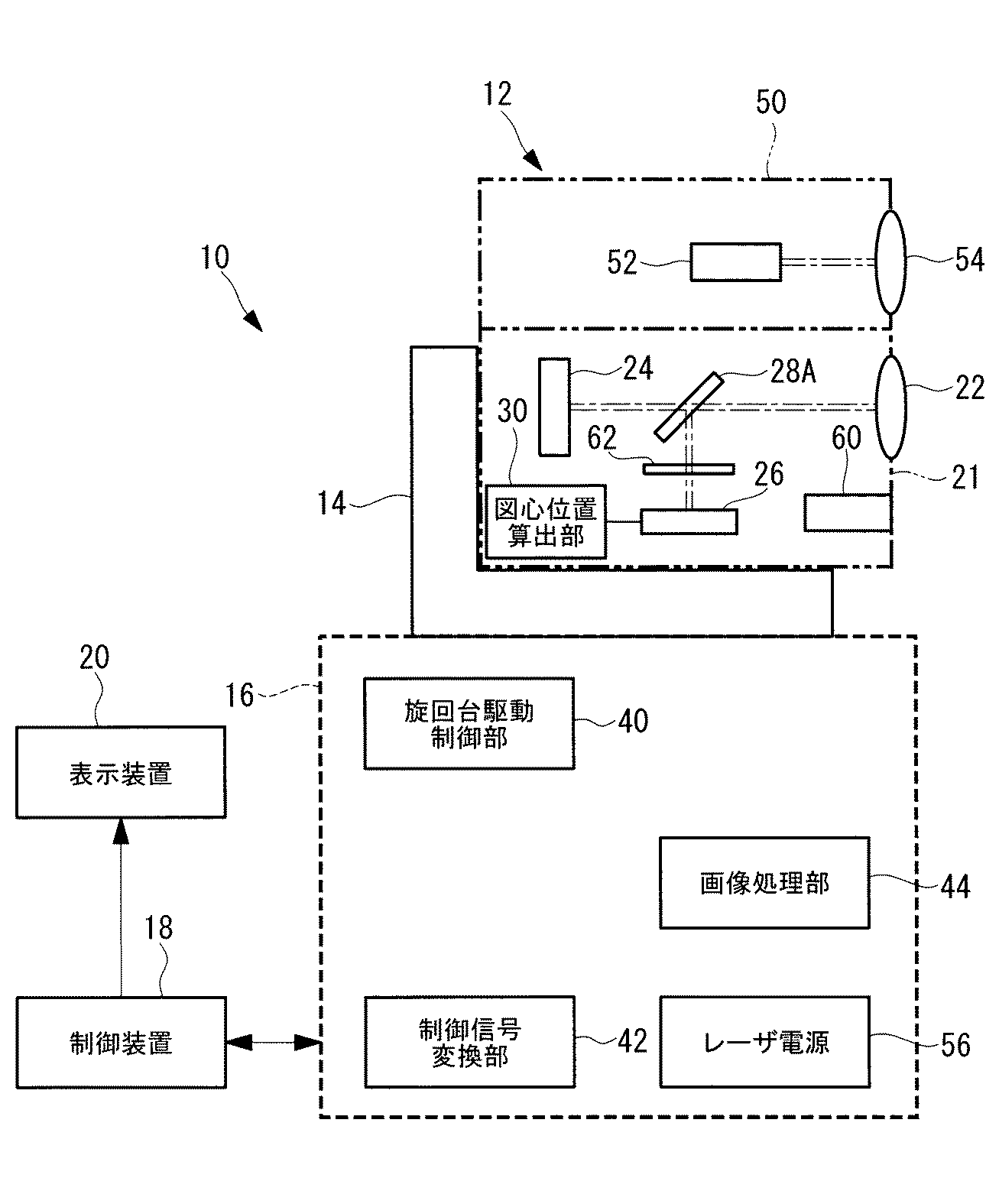
図1は、本発明の第1実施形態に係る監視装置10の全体構成を示すブロック図である。監視装置10は、例えば船舶や船舶等における障害物等の物体の監視を行う。
図1に示されるように、本第1実施形態に係る監視装置10は、レーザ送受信部12、旋回台14、レーダ制御部16、制御装置18、及び表示装置20を備えている。
受光部21は、例えば、ズームレンズ22、撮像素子24、位置検出素子26(PSD:Position Sensitivity Diodes)、ミラー28A、及び図心位置算出部30を備えている。レーザ送受信部12は、旋回台14によりその回転角及び迎角が所望の角度に調節される。
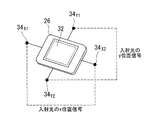
位置検出素子26の受光面32は、一例として図2に示されるように、矩形であるが、これに限らず、三角形や五角形以上等の多角形であってもよい。さらに、図2に示される出力端子34X1,34X2,34Y1,34Y2の位置も一例であり、これに限られない。
出力端子34X1,34X2から出力される電流IX1,IX2は、入射光の受光面32におけるx方向の位置を示す。一方、出力端子34Y1,34Y2から出力される電流IY1,IY2は、入射光の受光面32におけるy方向の位置を示す。
そして、入射光の図心位置をx,yとし、x方向の抵抗長をLxとし、y方向の抵抗長をLyとすると、図心位置x,yは、下記(1)式を用いて算出される。算出された図心位置x,yが監視する物体の位置を示すこととなる。
一方、位置検出素子26により物体の位置を特定するためには、出力端子34X1,34X2,34Y1,34Y2から出力される複数の電流値に基づいて、入射光の受光面32における図心位置を算出する。図心位置は、(1)式に基づいて簡易に算出できるので、本第1実施形態に係る監視装置10は、複雑な画像処理を必要とせず、簡易かつ迅速に監視する物体の位置を特定できる。
従って、本第1実施形態に係る監視装置10は、簡易な構成で物体の確実な追尾を可能とする
以下、本発明の第2実施形態について説明する。
送光部50は、レーザ光を発するレーザ発振器52、レーザ発振器52から発せられたレーザ光を物体へ照射させる送光レンズ54、及び送光レンズ54の角度を調整するための送光レンズアクチュエータ(図示略)を備えている。
図5は、本第2実施形態に係る監視装置10によって、物体にレーザ光が照射された場合において、位置検出素子26の受光面32に投影される範囲の一例を示した模式図である。図5の例に示されるように、レーザ光は、送光レンズ54によって発散され、受光面32の投影範囲よりも広い範囲を照射範囲とする。
なお、図5に示されるレーザ光は、照射範囲が円形とされているが、これに限らず、照射範囲が楕円形、矩形等他の形状であってもよい。
位置検出素子26は、ガイド光が受光面32に入射した入射位置に応じた電流IX1,IX2,IY1,IY2を複数の出力端子34X1,34X2,34Y1,34Y2から出力する。
図心位置算出部30は、出力端子から出力された電流IX1,IX2,IY1,IY2に基づいて受光面32に入射したレーザ光の図心位置を算出する。
そして、旋回台駆動制御部40は、図心位置算出部30で算出された図心位置と受光部21の中心位置との差がなくなるように、レーザ送受信部12を旋回させる。
以下、本発明の第3実施形態について説明する。
図心位置算出部30は、出力された電流IX1,IX2,IY1,IY2に基づいて受光面32に入射したレーザ光の図心位置を算出する。
このため、ガイド光を監視する物体に照射し続けることによって、監視する物体と他の物体とが区別されることとなる。
監視する物体が移動すると、ガイド光は監視する物体に対して広さを有しているので、図8に示されるように、位置検出素子26の受光部21に入射したガイド光の図心位置が変化する。
そして、旋回台駆動制御部40は、図心位置算出部30で算出された図心位置と受光部21の中心位置との差Δx,Δyが0となるように、レーザ送受信部12を旋回させる。
図9に示されるように、ガイド光は、レーザ光の照射領域よりも狭い照射領域内で各々が重ならないように複数出射されてもよい。なお、図9の例に示される複数のガイド光は、照射領域が矩形とされ、該照射領域内で縦横にマトリクス状に配列されているが、これに限らず、例えば、照射領域が円形とされ、同心円状に複数のガイド光が配列されてもよいし、照射領域が三角形や五角形以上の多角形とされてもよい。
これによれば、ガイド光の照射領域の中心位置から監視する物体がずれても、複数出射されるガイド光の何れかが物体を照射し続けることとなるので、監視する物体をより確実に追尾できる。
以下、本発明の第4実施形態について説明する。
同期部74は、同期制御信号に基づいて同期信号を生成し、レーザ電源56及び高速ゲート装置制御部72に出力する。高速ゲート装置制御部72は、シャッタ駆動信号及び同期信号に基づいて高速ゲート装置70を駆動する。レーザ電源56は、同期信号に基づいてレーザ発振器52を駆動する。
図心位置算出部30は、出力端子から出力された電流IX1,IX2,IY1,IY2に基づいて受光面32に入射したレーザ光の図心位置を算出する。
そして、旋回台駆動制御部40は、図心位置算出部30で算出された図心位置と受光部21の中心位置との差がなくなるように、レーザ送受信部12を旋回させる。
以下、本発明の第5実施形態について説明する。
ただし、本第5実施形態に係るミラー28Bは、ズームレンズ22によって導かれたレーザ光を、位置検出素子26へ反射させる一方、撮像素子24へは入射させない。また、ミラー28Bは、ズームレンズ22から撮像素子24に至る光路から移動可能とされている。
図11(A)に示されるように、ミラー28Bは、ズームレンズ22によって導かれたレーザ光を、反射させ位置検出素子26に送光する。そして、ズームレンズ22によって導かれたレーザ光を撮像素子24へ送光させる場合、図11(B)に示されるように、ミラー28Bは、レーザ光の光路から移動する。これによって、撮像素子24に光が入射することとなる。なお、ミラー28Bは、レーザ光に同期して駆動するモータによって移動される。
以下、本発明の第6実施形態について説明する。
本第6実施形態に係る監視装置10は、受光部21に撮像素子を備えていない。このため、受光部21内に導かれた光を位置検出素子26及び撮像素子へ送光させるミラーといった入射光送光手段も備えない。
また、受光部21に撮像素子を備えていないことに伴い、レーダ制御部16は、画像処理装置を備えない。
なお、本第6実施形態に係る監視装置10の作用は、上述した第1実施形態から第3実施形態と同様であるため、その説明を省略する。
21 受光部
24 撮像素子
26 位置検出素子
28A ミラー
28B ミラー
30 図心位置算出部
32 受光面
34 出力端子
50 送光部
60 ガイド光照射部
62 フィルタ
Claims (10)
- 物体を撮像する撮像素子と、
光が入射する受光面、及び該受光面の辺に設けられ、光の入射位置までの抵抗長に応じた信号を出力する複数の出力端子を有する位置検出素子と、
物体に反射した光が入射され、該光を前記撮像素子及び前記位置検出素子の少なくとも一方へ送光する入射光送光手段と、
前記位置検出素子が有する複数の前記出力端子から出力された前記信号に基づいて、前記位置検出素子に入射した光の前記受光面における図心位置を算出する算出手段と、
を備えた監視装置。 - レーザ光を出射する送光手段を備え、
前記位置検出素子は、前記送光手段から出射された前記レーザ光が物体に到達し、前記物体により反射された光が前記受光面に入射する請求項1記載の監視装置。 - 前記送光手段から出射される前記レーザ光と異なる波長であり、かつ照射領域が前記レーザ光の照射領域よりも狭いガイド光を、物体に反射して前記受光面の所定位置に入射するように出射するガイド光照射手段と、
前記レーザ光の波長を通過させずに前記ガイド光の波長を通過させ、前記位置検出素子に前記ガイド光を入射させるフィルタと、
を備えた請求項2記載の監視装置。 - 前記ガイド光は、前記レーザ光の照射領域よりも狭い照射領域内で各々が重ならないように複数出射される請求項3記載の監視装置。
- 前記送光手段は、前記レーザ光をパルス状に出射し、
前記位置検出素子は、前記送光手段から出射された前記レーザ光が物体に到達し、前記物体により反射された反射光が到達するタイミングに合わせてシャッタが開かれ、該反射光が受光面に入射した入射位置に応じた信号を複数の出力端子から出力する請求項2記載の監視装置。 - 前記送光手段は、前記撮像素子のフレームレートの2倍の周期で、パルス状のレーザ光を出射し、
前記入射光送光手段は、前記位置検出素子又は前記撮像素子へ光を送光するミラーであり、パルス状に出射される前記レーザ光に同期して、前記撮像素子と前記位置検出素子とへ交互に光を送光させる請求項5記載の監視装置。 - レーザ光を出射する送光手段と、
前記送光手段から出射された前記レーザ光が物体に到達し、前記物体により反射された光が入射する受光面、及び該受光面の辺に設けられ、光の入射位置までの抵抗長に応じた信号を出力する複数の出力端子を有する位置検出素子と、
前記位置検出素子が有する複数の前記出力端子から出力された前記信号に基づいて、前記位置検出素子に入射した光の受光面における図心位置を算出する算出手段と、
を備えた監視装置。 - 前記送光手段から出射される前記レーザ光と異なる波長であり、かつ照射領域が前記レーザ光の照射領域よりも狭いガイド光を、該ガイド光が物体に反射した光が前記受光面の所定位置に入射するように出射するガイド光照射手段と、
前記レーザ光の波長を通過させずに前記ガイド光の波長を通過させ、前記位置検出素子へ前記ガイド光を入射させるフィルタと、
を備えた請求項7記載の監視装置。 - 物体を撮像する撮像素子と、光が入射する受光面、及び該受光面の辺に設けられ、光の入射位置までの抵抗長に応じた信号を出力する複数の出力端子を有する位置検出素子と、物体に反射した光が入射され、該光を前記撮像素子及び前記位置検出素子の少なくとも一方へ送光する入射光送光手段と、を備えた監視装置を用いた監視方法であって、
前記位置検出素子が有する複数の前記出力端子から出力された前記信号に基づいて、前記位置検出素子に入射した光の前記受光面における図心位置を算出する第1工程と、
前記第1工程で算出した図心位置が前記位置検出素子の前記受光面の所定位置となるように、前記位置検出素子が設けられた筐体を旋回させて物体を追尾する第2工程と、
を含む監視方法。 - レーザ光を出射する送光手段と、前記送光手段から出射された前記レーザ光が物体に到達し、前記物体により反射された光が入射する受光面、及び該受光面の辺に設けられ、光の入射位置までの抵抗長に応じた信号を出力する複数の出力端子を有する位置検出素子と、を備えた監視装置を用いた監視方法であって、
前記位置検出素子が有する複数の前記出力端子から出力された前記信号に基づいて、前記位置検出素子に入射した光の前記受光面における図心位置を算出する第1工程と、
前記第1工程で算出した図心位置が前記位置検出素子の前記受光面の所定位置となるように、前記位置検出素子が設けられた筐体を旋回させて物体を追尾する第2工程と、
を含む監視方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012044820A JP6129475B2 (ja) | 2012-02-29 | 2012-02-29 | 監視装置及び監視方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012044820A JP6129475B2 (ja) | 2012-02-29 | 2012-02-29 | 監視装置及び監視方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013181794A true JP2013181794A (ja) | 2013-09-12 |
| JP6129475B2 JP6129475B2 (ja) | 2017-05-17 |
Family
ID=49272554
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012044820A Active JP6129475B2 (ja) | 2012-02-29 | 2012-02-29 | 監視装置及び監視方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6129475B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022172185A (ja) * | 2019-08-06 | 2022-11-15 | 直之 村上 | コンピユーターの目(pceye) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05133723A (ja) * | 1991-11-13 | 1993-05-28 | Sumitomo Electric Ind Ltd | レーザを利用した離隔測定装置と離隔測定方法 |
| JP2000162307A (ja) * | 1998-11-30 | 2000-06-16 | Mitsubishi Heavy Ind Ltd | 原子炉容器点検ロボットの位置標定用レーザ追尾装置 |
| JP2003149717A (ja) * | 2001-11-19 | 2003-05-21 | Mitsubishi Heavy Ind Ltd | 撮像方法及び撮像装置 |
| JP2004170356A (ja) * | 2002-11-22 | 2004-06-17 | Topcon Corp | 反射体自動追尾装置 |
| JP2005229253A (ja) * | 2004-02-12 | 2005-08-25 | Olympus Corp | 空間光伝送装置 |
| JP2006317303A (ja) * | 2005-05-13 | 2006-11-24 | Mitsubishi Heavy Ind Ltd | 監視装置 |
| JP2009145207A (ja) * | 2007-12-14 | 2009-07-02 | Topcon Corp | 測量装置 |
| JP2009270954A (ja) * | 2008-05-08 | 2009-11-19 | Nikon Vision Co Ltd | 距離計 |
| WO2010148526A1 (de) * | 2009-06-23 | 2010-12-29 | Leica Geosystem Ag | Tracking-verfahren und messsystem mit lasertracker |
| WO2010148525A1 (de) * | 2009-06-23 | 2010-12-29 | Leica Geosystems Ag | Koordinatenmessgerät |
-
2012
- 2012-02-29 JP JP2012044820A patent/JP6129475B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05133723A (ja) * | 1991-11-13 | 1993-05-28 | Sumitomo Electric Ind Ltd | レーザを利用した離隔測定装置と離隔測定方法 |
| JP2000162307A (ja) * | 1998-11-30 | 2000-06-16 | Mitsubishi Heavy Ind Ltd | 原子炉容器点検ロボットの位置標定用レーザ追尾装置 |
| JP2003149717A (ja) * | 2001-11-19 | 2003-05-21 | Mitsubishi Heavy Ind Ltd | 撮像方法及び撮像装置 |
| JP2004170356A (ja) * | 2002-11-22 | 2004-06-17 | Topcon Corp | 反射体自動追尾装置 |
| JP2005229253A (ja) * | 2004-02-12 | 2005-08-25 | Olympus Corp | 空間光伝送装置 |
| JP2006317303A (ja) * | 2005-05-13 | 2006-11-24 | Mitsubishi Heavy Ind Ltd | 監視装置 |
| JP2009145207A (ja) * | 2007-12-14 | 2009-07-02 | Topcon Corp | 測量装置 |
| JP2009270954A (ja) * | 2008-05-08 | 2009-11-19 | Nikon Vision Co Ltd | 距離計 |
| WO2010148526A1 (de) * | 2009-06-23 | 2010-12-29 | Leica Geosystem Ag | Tracking-verfahren und messsystem mit lasertracker |
| WO2010148525A1 (de) * | 2009-06-23 | 2010-12-29 | Leica Geosystems Ag | Koordinatenmessgerät |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022172185A (ja) * | 2019-08-06 | 2022-11-15 | 直之 村上 | コンピユーターの目(pceye) |
| JP7282310B2 (ja) | 2019-08-06 | 2023-05-29 | 直之 村上 | コンピユーターの目(pceye) |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6129475B2 (ja) | 2017-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6784295B2 (ja) | 距離測定システム、距離測定方法およびプログラム | |
| US10475312B2 (en) | Monitoring camera and monitoring camera control method | |
| JP4006577B2 (ja) | 監視装置 | |
| US7466359B2 (en) | Image-pickup apparatus and method having distance measuring function | |
| JP5469391B2 (ja) | ホームドア確認システム | |
| JP2018119942A (ja) | 撮像装置及びその監視方法並びにプログラム | |
| JP2009217252A5 (ja) | ||
| JP2013207415A (ja) | 撮像システム及び撮像方法 | |
| JP6123377B2 (ja) | 画像処理装置、オブジェクト検出方法、およびオブジェクト検出プログラム | |
| JPWO2018042481A1 (ja) | 撮影装置及び撮影方法 | |
| JP2006280938A (ja) | 安全な眼球検出 | |
| JP5682898B2 (ja) | 監視カメラ位置較正デバイス | |
| KR20120093502A (ko) | 레이저를 이용한 장애물 감지장치 및 방법. | |
| JP2006317304A (ja) | 監視装置 | |
| WO2017198038A1 (zh) | 对人眼安全的激光三角测量系统 | |
| JP2015213251A (ja) | 挙動解析装置、監視システム及びアミューズメントシステム | |
| JP2014055925A (ja) | 画像処理装置、オブジェクト検出方法、およびオブジェクト検出プログラム | |
| JP2008224620A (ja) | 測距装置 | |
| KR101634129B1 (ko) | 팬틸트 일체형 감시 카메라의 영상추적 제어 시스템 | |
| JP6129475B2 (ja) | 監視装置及び監視方法 | |
| JP5605565B2 (ja) | 対象識別装置及び対象識別方法 | |
| JP6828747B2 (ja) | 投射システム、投射方法およびプログラム | |
| US10962645B2 (en) | Reception apparatus, reception method, transmission apparatus, transmission method, and communication system | |
| JP6273682B2 (ja) | 画像処理装置、オブジェクト検出方法、およびオブジェクト検出プログラム | |
| JP2012198802A (ja) | 侵入物検出システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160809 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161011 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170314 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170412 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6129475 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |