JP2013164278A - 物理量検出器、物理量検出デバイス、電子機器 - Google Patents
物理量検出器、物理量検出デバイス、電子機器 Download PDFInfo
- Publication number
- JP2013164278A JP2013164278A JP2012026082A JP2012026082A JP2013164278A JP 2013164278 A JP2013164278 A JP 2013164278A JP 2012026082 A JP2012026082 A JP 2012026082A JP 2012026082 A JP2012026082 A JP 2012026082A JP 2013164278 A JP2013164278 A JP 2013164278A
- Authority
- JP
- Japan
- Prior art keywords
- physical quantity
- base
- support base
- quantity detector
- quantity detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Abstract
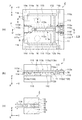
【解決手段】物理量検出器1は、ベース部10と、ベース部10に継手部11を介して延在され、物理量の変化に応じて変位する可動部12と、を有するカンチレバー9と、ベース部10と可動部12とに掛け渡された物理量検出素子13と、を備える。カンチレバー9は、ベース部10の第1主面10aに凹部17bを形成することによって島状に突設される第2支持台部10e,10fと、可動部12の第1主面12aに凹部17bを形成することによって島状に突設される第1支持台部12c,12dと、を有する。物理量検出素子13は、振動梁部13a,13bに接続される第1基部13dと、他方の長手方向端部に接続される第2基部13eとを有し、第1支持台部12c,12dと第1基部13d、及び第2支持台部10e,10fと第2基部13eが、接着剤を用いて固定されている。
【選択図】図1
Description
本適用例によれば、カンチレバーと物理量検出素子とを接着固定する際、第1支持台部または第2支持台部から流れ出す接着剤を凹部で吸収するため、物理量検出素子の共振周波数に影響がある位置への接着剤の付着を防止できる。
また、物理量検出器をパッケージ内に収容することで、外部からの塵埃や水分を排除することができると共に、取り扱い性が向上するという効果がある。
なお、以下の説明で参照する図は、各部材を認識可能な大きさとするため、各部材ないし部分の縦横の縮尺は実際のものとは異なる模式図である。
(物理量検出器)
まず、物理量検出器について具体的な実施形態をあげ説明する。
(実施形態1)
この継手部11により、可動部12は、第1主面12aと交差する方向(Z方向)に加わる物理量(例えば、加速度)に応じて、継手部11を支点(回転軸)にして第1主面12aと交差する方向(Z方向)に変位する。よって、継手部11はヒンジの機能を有する。
物理量検出素子13は、例えば、水晶の原石などから所定の角度で切り出された水晶基板を用いて、フォトリソグラフィー、エッチングなどの技術を用いて精度よく形成されている。
なお、励振電極、引き出し電極13f,13g、接続端子10b,10c、外部接続端子14e,14fは、例えば、Crを下地層とし、その上にAuが積層された構成となっている。
なお、固定部が2箇所の場合には、固定部同士を結んだ直線上に重心位置G0がくるように2箇所の固定部を配置すればよい。
一方、第2支持台部10e,10fは、中心軸Pに対し直交する方向に所定の大きさの空隙を有して分割されている。第2支持台部10e,10fは、中心軸Pを挟んで等距離に配置されると共に、位置、形状とも同じである。
図3は、実施形態1に係る物理量検出器1の動作を模式的に示す断面図であり、(a)は、可動部12が−Z方向に変位した状態を示し、(b)は、可動部12が+Z方向に変位した状態を示す。
(変形例)
図4は、変形例に係る物理量検出器1の一部を示し、(a)は部分平面図、(b)は(a)のA−A切断面を示す断面図である。なお、図4では、質量部15の図示を省略している。
また、凹部17は、可動部12の第1主面12a(またはベース部10の第1主面10a)からの溝部11aの深さよりも浅く形成されている。
なお、上述した変形例による物理量検出器1の動作は実施形態1と同じである。
(実施形態2)
図5は、実施形態2に係る物理量検出器2を示し、(a)は平面図、(b)は、(a)のD−D切断面を示す断面図、(c)は(a)のE−E切断面を示す断面図である。なお、配線は省略してあり、前述した実施形態1との共通部分には、同一符号を付して詳細な説明を省略し、実施形態1と異なる部分を中心に説明する。
カンチレバー119(可動部112)と、質量部115それぞれとの接合は接着剤16を用いて実施形態1と同様に行われる。
また、物理量検出素子113は、ベース部110の端部から可動部112の自由端部にまで延在されている。
一方、第2支持台部110e,110fは、物理量検出素子113の平面視で重心位置G1を通り、振動梁部113a,113bの延在方向に沿う中心軸Pに対し直交する方向に所定の大きさの空隙を有して分割されている。第2支持台部110e,110fは、中心軸Pを挟んで等距離に配置されると共に、位置、形状とも同じである。
(物理量検出デバイス)
図6は、物理量検出デバイスの概略構成を示し、(a)は平面図、(b)は(a)のF−F切断面を示す断面図である。なお、(a)はリッド(蓋部材)の図示を省略している。また、物理量検出器としては、実施形態1に記載の物理量検出器1を例示し、共通部分には同一符号を付し詳細な説明を省略する。
パッケージベース21には、セラミックグリーンシートを積層し焼成した酸化アルミニウム焼結体、水晶、ガラス、シリコンなどが用いられている。
リッド22には、パッケージベース21と同材料、または、コバール、42アロイ、ステンレス鋼などの金属が用いられている。
内部端子24,25は、物理量検出器1の支持部14に設けられた外部接続端子14e,14fと対向する位置(平面視において重なる位置)に設けられている。なお、図示は省略するが、外部接続端子14eは、ベース部10の接続端子10bと接続され、外部接続端子14fは、ベース部10の接続端子10cと接続されている。
なお、外部接続端子14e,14fは、支持部14の固定部14b,14cと平面視において重なる位置に設けられることが好ましい。
外部端子27,28は、図示しない内部配線によって内部端子24,25と接続されている。例えば、外部端子27は、内部端子24と接続され、外部端子28は、内部端子25と接続されている。
内部端子24,25及び外部端子27,28は、Wなどのメタライズ層にNi、Auなどの各被膜をメッキなどの方法により積層した金属膜からなる。
封止部29は、パッケージベース21に形成された、外底面26側の孔径が内底面23側の孔径より大きい段付きの貫通孔29aに、Au/Ge合金、はんだなどからなる封止材29bを投入し、加熱溶融後、固化させることでパッケージ20の内部を気密に封止する構成となっている。
ここで、固定部14b,14cが外部接続端子14e,14fと内部端子24,25とを接続する部分であることから、接着剤30には、例えば、金属フィラーなどの導電性物質が混合されたシリコーン樹脂系の導電性接着剤が用いられている。なお、固定部14a,14dにおける固定には、金属フィラーなどの導電性物質を含まないシリコーン樹脂系の接着剤を用いてもよい。
なお、パッケージ20の内部は、窒素、ヘリウム、アルゴンなどの不活性ガスが充填されていてもよい。
なお、パッケージ20は、パッケージベース21及びリッド22の両方に凹部を有していてもよい。
なお、物理量検出デバイスの内部に、物理量検出回路を内蔵する構造としてもよい。
(電子機器)
図7は、電子機器の1例としての傾斜計を例示する模式斜視図である。傾斜計4は、実施形態1に記載の物理量検出器1を、傾斜センサーとして備えている。
傾斜計4は、例えば、山の斜面、道路の法面、盛土の擁壁面などの被計測場所に設置される。傾斜計4は、外部からケーブル40を介して電源が供給され、または電源を内蔵し、図示しない駆動回路によって物理量検出器1(傾斜センサー)に駆動信号が送られている。
傾斜計4は、図示しない物理量検出回路によって、傾斜センサーに加わる重力加速度に応じて変化する共振周波数から、傾斜計4の姿勢の変化(傾斜計4に対する重力加速度が加わる方向の変化)を検出し、それを角度に換算して、例えば、無線などで基地局にデータ転送する。従って、傾斜計4は、被計測場所における異常の早期発見に貢献することができる。
なお、電子機器に搭載する際の形態としては、物理量検出器1,2が単独の形態でも、物理量検出デバイス3の形態であってもよい。
また、物理量検出素子13,113の基材は、水晶に限定するものではなく、タンタル酸リチウム(LiTaO3)、四ホウ酸リチウム(Li2B4O7)、ニオブ酸リチウム(LiNbO3)、チタン酸ジルコン酸鉛(PZT)、酸化亜鉛(ZnO)、窒化アルミニウム(AlN)などの圧電材料、または酸化亜鉛(ZnO)、窒化アルミニウム(AlN)などの圧電体を被膜として備えたシリコンなどの半導体材料であってもよい。
Claims (8)
- ベース部と、前記ベース部に継手部を介して延在され物理量の変化に応じて変位する可動部と、を有する平板状のカンチレバーと、
前記ベース部と前記可動部とに掛け渡されて固定され、前記可動部の変位に応じて物理量を検出する物理量検出素子と、
を備え、
前記カンチレバーは、前記可動部の第1主面に設けられる凹部内に配置される第1支持台部と、前記ベース部の第1主面に設けられる凹部内に配置される第2支持台部と、を有し、
前記物理量検出素子は、振動梁部の一方の長手方向端部に接続される第1基部と、他方の長手方向端部に接続される第2基部と、を有し、
前記第1支持台部は、前記第1基部の幅方向に空隙を有して分割されており、
前記第2支持台部は、前記第2基部の幅方向に空隙を有して分割されており、
前記第1支持台部と前記第1基部、及び前記第2支持台部と前記第2基部が、接着剤を用いて固定されていること、
を特徴とする物理量検出器。 - 前記第1支持台部は、前記可動部に設けられる前記凹部に囲まれており、
前記第2支持台部は、前記ベース部に設けられる前記凹部に囲まれていること、
を特徴とする請求項1に記載の物理量検出器。 - 前記カンチレバーと前記物理量検出素子とが接着固定される際、
前記第1支持台部及び前記第2支持台部から流れ出した前記接着剤が、前記可動部に設けられている前記凹部、及び前記ベース部に設けられている前記凹部の範囲内にあること、
を特徴とする請求項1または請求項2に記載の物理量検出器。 - 前記カンチレバーと前記物理量検出素子は、前記接着剤を介して厚み方向に所定の隙間を有して固定されていること、
を特徴とする請求項1ないし請求項3のいずれか一項に記載の物理量検出器。 - 前記凹部は、前記第1支持台部の周囲から前記第2支持台部の周囲にわたって連続して形成されていること、
を特徴とする請求項1ないし請求項4のいずれか一項に記載の物理量検出器。 - 前記継手部は、前記可動部の第1主面と前記第1主面に対向する第2主面の両方に形成される溝部によって形成されており、
前記凹部の深さは、前記可動部の第1主面側の溝部の深さより浅いこと、
を特徴とする請求項5に記載の物理量検出器。 - 請求項1ないし請求項6のいずれか一項に記載の物理量検出器と、
前記物理量検出器を収容するパッケージと、
を備えていることを特徴とする物理量検出デバイス。 - 請求項1ないし請求項6のいずれか一項に記載の物理量検出器と、
少なくとも物理量検出回路と、
を備えていることを特徴とする電子機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012026082A JP2013164278A (ja) | 2012-02-09 | 2012-02-09 | 物理量検出器、物理量検出デバイス、電子機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012026082A JP2013164278A (ja) | 2012-02-09 | 2012-02-09 | 物理量検出器、物理量検出デバイス、電子機器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013164278A true JP2013164278A (ja) | 2013-08-22 |
| JP2013164278A5 JP2013164278A5 (ja) | 2015-03-26 |
Family
ID=49175713
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012026082A Withdrawn JP2013164278A (ja) | 2012-02-09 | 2012-02-09 | 物理量検出器、物理量検出デバイス、電子機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013164278A (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002098709A (ja) * | 2000-09-26 | 2002-04-05 | Matsushita Electric Works Ltd | 半導体加速度センサ |
| JP2006153519A (ja) * | 2004-11-25 | 2006-06-15 | Matsushita Electric Works Ltd | 加速度センサ |
| JP2006250760A (ja) * | 2005-03-11 | 2006-09-21 | Omron Corp | センサ |
| JP2010060347A (ja) * | 2008-09-02 | 2010-03-18 | Seiko Epson Corp | 振動型センサ |
| JP2010181210A (ja) * | 2009-02-03 | 2010-08-19 | Epson Toyocom Corp | 加速度センサ |
| JP2010271169A (ja) * | 2009-05-21 | 2010-12-02 | Seiko Epson Corp | 物理量検出装置、手ぶれ補正装置及びカメラ |
-
2012
- 2012-02-09 JP JP2012026082A patent/JP2013164278A/ja not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002098709A (ja) * | 2000-09-26 | 2002-04-05 | Matsushita Electric Works Ltd | 半導体加速度センサ |
| JP2006153519A (ja) * | 2004-11-25 | 2006-06-15 | Matsushita Electric Works Ltd | 加速度センサ |
| JP2006250760A (ja) * | 2005-03-11 | 2006-09-21 | Omron Corp | センサ |
| JP2010060347A (ja) * | 2008-09-02 | 2010-03-18 | Seiko Epson Corp | 振動型センサ |
| JP2010181210A (ja) * | 2009-02-03 | 2010-08-19 | Epson Toyocom Corp | 加速度センサ |
| JP2010271169A (ja) * | 2009-05-21 | 2010-12-02 | Seiko Epson Corp | 物理量検出装置、手ぶれ補正装置及びカメラ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5678741B2 (ja) | 加速度検出器、加速度検出デバイス及び電子機器 | |
| JP5896114B2 (ja) | 物理量検出デバイス、物理量検出器、および電子機器 | |
| US8919200B2 (en) | Physical quantity detection device, physical quantity detector, and electronic device | |
| US20170176186A1 (en) | Angular velocity sensor having support substrates | |
| JP2013050321A (ja) | 物理量検出器及び電子機器 | |
| JP2013217667A (ja) | 物理量検出デバイス、物理量検出器、および電子機器、並びに物理量検出デバイスの製造方法 | |
| JP2014107778A (ja) | 振動デバイス、電子機器及び移動体 | |
| JP5712755B2 (ja) | 加速度検出器、加速度検出デバイス及び電子機器 | |
| JP2013201638A (ja) | 振動デバイス | |
| JP5838694B2 (ja) | 物理量検出器、物理量検出デバイス及び電子機器 | |
| JP5867631B2 (ja) | 加速度検出器、加速度検出デバイス及び電子機器 | |
| JP2011169671A (ja) | 慣性センサー及び慣性センサー装置 | |
| JP2013164278A (ja) | 物理量検出器、物理量検出デバイス、電子機器 | |
| JP5987500B2 (ja) | 物理量検出デバイス、電子機器、移動体 | |
| JP2012242344A (ja) | 加速度検出器、加速度検出デバイス及び電子機器 | |
| JP2013160553A (ja) | 物理量検出器、物理量検出デバイス、電子機器 | |
| JP2013181799A (ja) | 物理量検出デバイス、電子機器 | |
| JP2013246121A (ja) | 圧力センサー素子およびその製造方法、圧力センサー、並びに電子機器 | |
| JP2013170865A (ja) | 物理量検出デバイス、物理量検出器、及び電子機器 | |
| JP5954531B2 (ja) | 物理量検出デバイス、物理量検出器、および電子機器 | |
| JP2009085808A (ja) | 加速度センサ及び加速度測定装置 | |
| JP2014119369A (ja) | 物理量検出センサー、物理量検出装置、電子機器および移動体 | |
| JP2013217719A (ja) | 圧力センサー及び電子機器 | |
| JP2013011550A (ja) | 物理量センサー、物理量検出デバイス | |
| JP5776184B2 (ja) | センサ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151222 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20160219 |