JP2013080296A - ポインタ制御装置、プロジェクタ及びプログラム - Google Patents
ポインタ制御装置、プロジェクタ及びプログラム Download PDFInfo
- Publication number
- JP2013080296A JP2013080296A JP2011218727A JP2011218727A JP2013080296A JP 2013080296 A JP2013080296 A JP 2013080296A JP 2011218727 A JP2011218727 A JP 2011218727A JP 2011218727 A JP2011218727 A JP 2011218727A JP 2013080296 A JP2013080296 A JP 2013080296A
- Authority
- JP
- Japan
- Prior art keywords
- projection
- pointer
- image
- unit
- reference position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Landscapes
- Projection Apparatus (AREA)
- Position Input By Displaying (AREA)
Abstract
【解決手段】撮像制御部310が取得した投影画像から、画像処理部380の正方画角補正量算出部320が正方画角補正量を算出し、歪み量算出部330が歪み率を算出する。補正範囲決定部は350は、正方画角補正量と歪み率と履歴記憶部3710に記憶された基準位置Pの座標と、から基準位置Pにおいて画像が投影面上でどの程度引き延ばされているか算出して手振れ補正範囲を決定する。ポインタ位置決定部360は、通信制御部340が取得した指示座標が、手振れ補正範囲に含まれているか判別する。指示座標が手振れ補正範囲に含まれている場合は、当該指示座標の変化は手振れに起因する変化であるとの判断の元、ポインタ位置決定部360はポインタの位置を基準位置から更新しない。
【選択図】図3
Description
投影面上に投影するための画像である投影用画像上の、ポインタデバイスが指示する位置を示す指示座標を順次取得する指示座標取得部と、
前記投影用画像上の基準位置を定める基準位置定義部と、
前記投影用画像が前記投影面に投影される態様である投影態様を取得する投影態様取得部と、
前記基準位置定義部が定めた基準位置と、前記投影態様取得部が取得した投影態様と、に基づいて前記指示座標取得部が取得した指示座標の変化が手振れによるものか否かを判別する判別基準を定める判別基準定義部と、
前記指示座標取得部が取得した指示座標が変化すると、前記判別基準定義部が定めた判別基準を用いて当該変化が手振れによるものか否か判別し、当該判別結果と、前記基準位置定義部が定めた基準位置と当該変化後の指示座標との少なくとも一つと、に基づいてポインタの位置を定めるポインタ位置制御部と、
を備えることを特徴とする。
本願の実施形態1に係る情報処理システム1を、図1を参照して説明する。画像投影システム1は、パーソナルコンピュータ(PC10)と、ポインタ制御装置30を含むプロジェクタ20と、スクリーン40と、ポインタデバイス50と、から構成される。
図2(a)では、ユーザはポインタデバイス50を用いてスクリーン40上の画像PI1の部位を指し示しており、その部位にポインタ(黒太矢印)が表示されている。ポインタデバイス50を持つユーザの手は、一定の幅でふるえている。
PI1はスクリーン40上に大きく投影されているので、手振れによる指示位置のぶれが及ぶ範囲は、スクリーン40上の画像PI1に比して小さい。そのため、画像PI1上のアイコンや操作部位等を指し示す操作に手振れが与える影響は比較的小さい。そこで、ポインタ制御装置30は、手振れと判定する範囲(補正範囲、手振れ補正範囲)を、画像PI1の比較的小さい範囲(例えば部位A1の内部)に設定する。
ユーザが図2(a)と同じ位置から、同じ量の手振れと共にPI2上の部位を指し示したとする(図2(b))。このとき、手振れによる指示位置のぶれが及ぶ範囲は、画像PI2に占める割合は、図2(a)よりも大きいため、手振れが操作に与える影響も大きい。
そのため、ポインタ制御装置30は、補正範囲を、画像PI2上の比較的大きい範囲(例えば部位A2の内部)に設定する。即ち、画像PI1と画像PI2とが同じ解像度を持つ場合には、部位A2は部位A1よりも面積(ピクセル数)が大きくなる。
ユーザが図2(a)及び(b)と同じ位置から、同じ量の手振れと共にスクリーン40上の画像PI3上の部位を指し示したとする。このとき、手振れによる指示位置のぶれが及ぶ範囲(手振れが操作に及ぼす影響)は、その部位が画像PI3上のどの位置にあるかによって異なる。
一方、部位A4の周辺では、歪みによって画像が小さく縮小されてため、手振れによる指示位置のぶれがユーザ操作に及ぼす影響が部位A3の付近よりも大きくなる。
入力部200は、受け付けた画像信号をA/Dコンバータ210に伝達する。
表示制御部220は、A/Dコンバータ210から伝達された画像を、必要が有れば台形補正等の補正処理を施し、発光制御部230と投影デバイス250とを制御して投影画面に投影する。
発光制御部230は、ランプユニット240に投影デバイス250が画像投影のために必要とするビーム(光線)を供給させる。
なお、投影デバイス250は、上記構成に限らず、液晶パネルによって画像を投影する画像投影デバイス等の、既知の任意の画像投影デバイスであってよい。
撮像部280は、投影画像を撮影した撮像画像を、ポインタ制御装置30の撮像制御部310に伝達する。
なお、情報処理部301と、データ記憶部302と、プログラム記憶部303と、入出力部304と、は内部バス307によってそれぞれ接続され、情報の送信が可能である。
入出力部304は、プロジェクタ20の通信部270、撮像部280等から入力されるデータを取得して情報処理部301に伝達する。また、入出力部304はプロジェクタ20の出力部290、外部機器と通信して情報処理部301の演算結果を出力する。
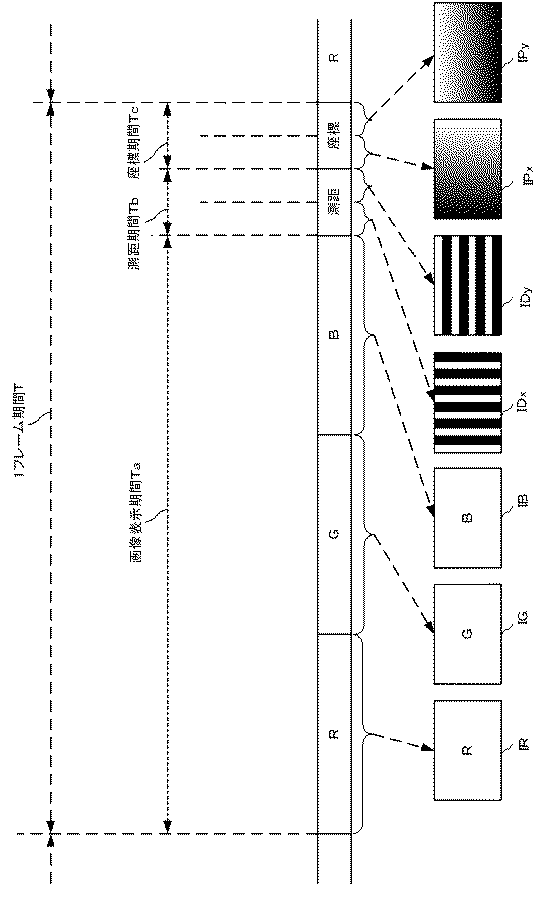
プロジェクタ20は、1フレーム期間T(例えば1/60秒)において、まず画像表示期間Taに、PC10から取得した画像の赤色成分(画像IR)と、緑色成分(画像IG)と、青色成分(画像IB)と、の画像を順次投影する。画像表示期間Taで画像IRと画像IGと画像IBとを投影することにより、プロジェクタ20はPC10から取得した投影用画像をスクリーン40に投影する。
画像IDxは一定間隔の縦縞模様、画像IDy一定間隔の横縞模様である。画像IDx及び画像IDyは、スクリーン40上の投影領域の大きさ・形状に対応する縞模様としてスクリーン40上に投影される。スクリーン40上で投影領域が台形に歪んでいると、画像IDx及び画像IDyも図6(b)及び図6(c)のように歪んで投影される。画像IDx及び画像IDyは任意の色の縞模様の画像であってよいが、ここでは赤外線画像であるとする。
画像処理部380は、算出した補正パラメータを補正範囲決定部350に伝達する。
水平の画角割合Zhは、例えば計算式(1)を用いて算出する。
Zh=Hs/Hb …(1)
垂直の画角割合Zvは、例えば計算式(2)を用いて算出する。
Zv=Vs/Vb …(2)
水平の正方補正量C0hは、手振れ補正範囲の水平方向の大きさを決定するパラメータの一つであり、画像全体が横方向に引き延ばされている割合が大きいほど大きくなる。
水平の正方補正量C0hは、例えば式(3)を用いて算出することができる。
C0h=Cbh・Zh …(3)
同様に、算出した垂直の画角割合Zvと標準補正量Cbvとから、垂直の正方補正量C0vを式(4)を用いて算出できる。
C0v=Cbv・Zv …(4)
水平の歪み割合Khは例えば式(5)を用いて算出できる。
Kh=Hl/Hs …(5)
さらに、最大幅Vlと最小幅Vsとから、垂直の歪み割合Kvを式(6)を用いて算出する。垂直の歪み割合Kvは、原点O(ここでは下側)の部分が上側よりも画像が引き延ばされている場合に1より大きくなり、逆の場合は1より小さくなる係数である。
Kv=Vl/Vs …(6)
図6(d)は、記憶部370の履歴記憶部3710に記憶された基準位置Pが座標(Px,Py)に位置する例を示している。ここで、画像PI4の解像度は水平方向にGhピクセル、垂直方向にGvピクセル、である。なお、Pxは基準位置P(t)が原点OからPxピクセル分x軸に方向にずれた位置にあること、Pyは基準位置Pが原点OからPyピクセル分y軸に方向にずれた位置にあること、をそれぞれ示す。
Ch=C0h・Kh・(Px+Gh)/Gh …(7)
Cv=C0v・Kv・(Py+Gv)/Gv …(8)
そして、更新した座標をあらたな基準位置Pとして、記憶部370の履歴記憶部3710に記憶する。
記憶部370は、ポインタ位置決定部360を始めとするポインタ制御装置30の記憶部370を除く各部の処理結果を記憶する。
記憶部370は、履歴記憶部3710と、設定記憶部3720と、を含む。
ポインタ制御装置30は、プロジェクタ20が投影画像を投影し、ポインタデバイス50から指示座標を伝達されると、図7のポインタ制御処理1を開始する。
指示位置が手振れ補正範囲の領域内であると判別すると(ステップS107;YES)、その範囲の動きは手振れであるとの推測できるので、ポインタ位置を更新せず、基準位置をポインタ位置としてPC10に伝達し、処理はステップS101にもどる。
ステップS108では、更新したポインタの位置をあらたな基準位置Pとして、記憶部370の履歴記憶部3710に記憶する。また、新たなポインタ位置をPC10に伝達する。
また、従来の技術による手振れ補正では、キャリブレーションによって取得したパラメータを投影画像全体に適用するため、画面が歪んでいた場合などでも同一の補正パラメータを用いて手振れ補正を実行するため、部位によって補正パラメータを変える等の柔軟な手振れ補正が実現できなかった。そのため、パラメータをユーザ操作に基づいて定めても、部位によって手振れ補正のパラメータがユーザのニーズとずれてしまうという問題があった。本実施形態のポインタ制御装置30によれば、現在の基準位置においてどの程度画像が引き延ばされているか等を鑑みて算出されたパラメータを用いて手振れ補正が実行できるため、ユーザのニーズにあった手振れ補正が実現できる。
このとき、補正パラメータは、台形補正の設定の更新やリセットボタンの押下などのイベントに応答して再度算出するとしてもよい。
Px/Ghについても同様である。
Hlr/(Hll+Hlr)についても同様である。
式(10)についても、式(9)と同様に上記係数を置換することが出来る。
次に、本発明の実施形態2について説明する。
実施形態2に係る画像投影システム2は、プロジェクタ21が現在のポインタ位置(基準位置)を中心とした基準図形をスクリーン40上に投影し、当該スクリーン上の基準図形の大きさに基づいて、ポインタ制御装置31が手振れ補正範囲を決定する事を特徴とする。
プロジェクタ21は、表示制御部(表示制御部221)の機能と、ポインタ制御装置(ポインタ制御装置31)の機能が異なる以外はプロジェクタ20(図2)と同じ構成を持つ。
プロジェクタ21は、測距期間Tbに、現在のポインタ位置を中心とする20ピクセル×20ピクセルの正方形SBを含む測距画像IDを投影する。その他の投影画像は、プロジェクタ20が投影する画像(図5)と同様である。
ポインタ制御装置31は、プロジェクタ21が投影画像を投影し、ポインタデバイス50から指示位置を伝達されると、図11のポインタ制御処理2を開始する。
次に、補正量算出部321が、式(11)を用いて水平方向の補正量Chを、式(12)を用いて垂直方向の補正量Cvを算出する(ステップS402)。
Ch=CSw・W/SW …(11)
Cv=CSh・H/SH …(12)
ただし、SWは基準投影設定で投影された場合の基準図形の横幅、SHは基準投影設定で投影された場合の基準図形の高さである。
CSwは基準投影設定で投影された場合の手振れ補正範囲の幅(単位:ピクセル)、CShは基準投影設定で投影された場合の手振れ補正範囲の高さ(単位:ピクセル)である。CSw、CSh、SW、SH、の各数値は記憶部370の設定記憶部3720に記憶されている。
以上、本発明の実施例について説明したが、本発明の実施形態は上記実施形態1乃至2に限定されず、下記のような変形が可能である。
円形とした場合は、手振れ補正範囲の半径を水平方向の補正量Chと垂直方向の補正量Cvとの平均としてよい。
投影面上に投影するための画像である投影用画像上の、ポインタデバイスが指示する位置を示す指示座標を順次取得する指示座標取得部と、
前記投影用画像上の基準位置を定める基準位置定義部と、
前記投影用画像が前記投影面に投影される態様である投影態様を取得する投影態様取得部と、
前記基準位置定義部が定めた基準位置と、前記投影態様取得部が取得した投影態様と、に基づいて前記指示座標取得部が取得した指示座標の変化が手振れによるものか否かを判別する判別基準を定める判別基準定義部と、
前記指示座標取得部が取得した指示座標が変化すると、前記判別基準定義部が定めた判別基準を用いて当該変化が手振れによるものか否か判別し、当該判別結果と、前記基準位置定義部が定めた基準位置と当該変化後の指示座標との少なくとも一つと、に基づいてポインタの位置を定めるポインタ位置制御部と、
を備えることを特徴とするポインタ制御装置。
前記判別基準定義部は、前記投影態様取得部が取得した投影態様に基づき前記基準位置を含む手振れ領域を定義し、前記変化後の座標が当該手振れ領域に含まれる場合には当該指示座標の変化を手振れによるものとして前記判別基準を定める、
ことを特徴とする付記1に記載のポインタ制御装置。
前記投影態様取得部は、前記投影用画像を前記投影面に投影した投影画像の垂直方向の大きさと水平方向の大きさとの少なくとも何れか一方と、当該投影画像の水平方向の歪み率と垂直方向の歪み率との少なくとも何れか一方と、を前記投影態様として取得し、
前記判別基準定義部は、前記投影態様取得部が取得した垂直方向の大きさと水平方向の大きさとの少なくとも何れか一方と、前記投影画像の水平方向の歪み率と垂直方向の歪み率との少なくとも何れか一方と、に基づき前記投影用画像が前記基準位置において投影面でどの程度引き延ばされているか導出し、前記手振れ領域を、当該引き延ばされている程度が大きいほど前記投影用画像上で小さくし、小さいほど前記投影用画像上で大きくする、
ことを特徴とする付記2に記載のポインタ制御装置。
前記投影態様取得部は、所定の態様測定用図形に対応する、投影画像上の態様測定用図形の形状及び大きさを取得し、当該投影画像上の態様測定用図形の形状及び大きさに基づいて前記垂直方向の大きさと水平方向の大きさとの少なくとも何れか一方と、前記投影画像の水平方向の歪み率と垂直方向の歪み率との少なくとも何れか一方と、を導出することにより前記投影態様を取得する、
ことを特徴とする付記3に記載のポインタ制御装置。
前記投影態様取得部は、前記基準位置定義部が定めた基準位置を内部に含む投影用画像上の基準図形に対応する、前記投影画像上の領域の高さと幅との少なくとも何れか一方を前記投影態様として取得する、
ことを特徴とする付記1又は2に記載のポインタ制御装置。
前記基準位置定義部は、前記ポインタ位置制御部が定めたポインタの位置の履歴に基づいて前記基準位置を定義する、
ことを特徴とする付記1乃至5の何れか一つに記載のポインタ制御装置。
前記ポインタ位置制御部は、前記指示座標の変化が手振れによるものと判別すると、前記基準位置を新たなポインタの位置とし、前記変化が手振れによるもので無いと判別すると、当該変化後の指示位置を新たなポインタの位置とする、
ことを特徴とする付記1乃至6の何れか一つに記載のポインタ制御装置。
投影面上に投影するための画像である投影用画像を投影する投影部と、
前記投影用画像上の、ポインタデバイスが指示する位置を示す指示座標を順次取得する指示座標取得部と、
前記投影用画像上の基準位置を定める基準位置定義部と、
前記投影用画像が前記投影面に投影される態様である投影態様を取得する投影態様取得部と、
前記基準位置定義部が定めた基準位置と、前記投影態様取得部が取得した投影態様と、に基づいて前記指示座標取得部が取得した指示座標の変化が手振れによるものか否かを判別する判別基準を定める判別基準定義部と、
前記指示座標取得部が取得した指示座標が変化すると、前記判別基準定義部が定めた判別基準を用いて当該変化が手振れによるものか否か判別し、当該判別結果と、前記基準位置定義部が定めた基準位置と当該変化後の指示座標との少なくとも一つと、に基づいてポインタの位置を定めるポインタ位置制御部と、
を備えることを特徴とするプロジェクタ。
コンピュータに、
投影面上に投影するための画像である投影用画像上の、ポインタデバイスが指示する位置を示す指示座標を順次取得する処理、
前記投影用画像上の基準位置を定める処理、
前記投影用画像が前記投影面に投影される態様である投影態様を取得する処理、
前記基準位置と、前記投影態様と、に基づいて前記指示座標の変化が手振れによるものか否かを判別する判別基準を定める処理、
前記指示座標が変化すると、前記判別基準を用いて当該変化が手振れによるものか否か判別し、当該判別結果と、前記基準位置と当該変化後の指示座標との少なくとも一つと、に基づいてポインタの位置を定める処理、
を実行させることを特徴とするプログラム。
Claims (9)
- 投影面上に投影するための画像である投影用画像上の、ポインタデバイスが指示する位置を示す指示座標を順次取得する指示座標取得部と、
前記投影用画像上の基準位置を定める基準位置定義部と、
前記投影用画像が前記投影面に投影される態様である投影態様を取得する投影態様取得部と、
前記基準位置定義部が定めた基準位置と、前記投影態様取得部が取得した投影態様と、に基づいて前記指示座標取得部が取得した指示座標の変化が手振れによるものか否かを判別する判別基準を定める判別基準定義部と、
前記指示座標取得部が取得した指示座標が変化すると、前記判別基準定義部が定めた判別基準を用いて当該変化が手振れによるものか否か判別し、当該判別結果と、前記基準位置定義部が定めた基準位置と当該変化後の指示座標との少なくとも一つと、に基づいてポインタの位置を定めるポインタ位置制御部と、
を備えることを特徴とするポインタ制御装置。 - 前記判別基準定義部は、前記投影態様取得部が取得した投影態様に基づき前記基準位置を含む手振れ領域を定義し、前記変化後の座標が当該手振れ領域に含まれる場合には当該指示座標の変化を手振れによるものとして前記判別基準を定める、
ことを特徴とする請求項1に記載のポインタ制御装置。 - 前記投影態様取得部は、前記投影用画像を前記投影面に投影した投影画像の垂直方向の大きさと水平方向の大きさとの少なくとも何れか一方と、当該投影画像の水平方向の歪み率と垂直方向の歪み率との少なくとも何れか一方と、を前記投影態様として取得し、
前記判別基準定義部は、前記投影態様取得部が取得した垂直方向の大きさと水平方向の大きさとの少なくとも何れか一方と、前記投影画像の水平方向の歪み率と垂直方向の歪み率との少なくとも何れか一方と、に基づき前記投影用画像が前記基準位置において投影面でどの程度引き延ばされているか導出し、前記手振れ領域を、当該引き延ばされている程度が大きいほど前記投影用画像上で小さくし、小さいほど前記投影用画像上で大きくする、
ことを特徴とする請求項2に記載のポインタ制御装置。 - 前記投影態様取得部は、所定の態様測定用図形に対応する、投影画像上の態様測定用図形の形状及び大きさを取得し、当該投影画像上の態様測定用図形の形状及び大きさに基づいて前記垂直方向の大きさと水平方向の大きさとの少なくとも何れか一方と、前記投影画像の水平方向の歪み率と垂直方向の歪み率との少なくとも何れか一方と、を導出することにより前記投影態様を取得する、
ことを特徴とする請求項3に記載のポインタ制御装置。 - 前記投影態様取得部は、前記基準位置定義部が定めた基準位置を内部に含む投影用画像上の基準図形に対応する、前記投影画像上の領域の高さと幅との少なくとも何れか一方を前記投影態様として取得する、
ことを特徴とする請求項1又は2に記載のポインタ制御装置。 - 前記基準位置定義部は、前記ポインタ位置制御部が定めたポインタの位置の履歴に基づいて前記基準位置を定義する、
ことを特徴とする請求項1乃至5の何れか一項に記載のポインタ制御装置。 - 前記ポインタ位置制御部は、前記指示座標の変化が手振れによるものと判別すると、前記基準位置を新たなポインタの位置とし、前記変化が手振れによるもので無いと判別すると、当該変化後の指示位置を新たなポインタの位置とする、
ことを特徴とする請求項1乃至6の何れか一項に記載のポインタ制御装置。 - 投影面上に投影するための画像である投影用画像を投影する投影部と、
前記投影用画像上の、ポインタデバイスが指示する位置を示す指示座標を順次取得する指示座標取得部と、
前記投影用画像上の基準位置を定める基準位置定義部と、
前記投影用画像が前記投影面に投影される態様である投影態様を取得する投影態様取得部と、
前記基準位置定義部が定めた基準位置と、前記投影態様取得部が取得した投影態様と、に基づいて前記指示座標取得部が取得した指示座標の変化が手振れによるものか否かを判別する判別基準を定める判別基準定義部と、
前記指示座標取得部が取得した指示座標が変化すると、前記判別基準定義部が定めた判別基準を用いて当該変化が手振れによるものか否か判別し、当該判別結果と、前記基準位置定義部が定めた基準位置と当該変化後の指示座標との少なくとも一つと、に基づいてポインタの位置を定めるポインタ位置制御部と、
を備えることを特徴とするプロジェクタ。 - コンピュータに、
投影面上に投影するための画像である投影用画像上の、ポインタデバイスが指示する位置を示す指示座標を順次取得する処理、
前記投影用画像上の基準位置を定める処理、
前記投影用画像が前記投影面に投影される態様である投影態様を取得する処理、
前記基準位置と、前記投影態様と、に基づいて前記指示座標の変化が手振れによるものか否かを判別する判別基準を定める処理、
前記指示座標が変化すると、前記判別基準を用いて当該変化が手振れによるものか否か判別し、当該判別結果と、前記基準位置と当該変化後の指示座標との少なくとも一つと、に基づいてポインタの位置を定める処理、
を実行させることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011218727A JP5768639B2 (ja) | 2011-09-30 | 2011-09-30 | ポインタ制御装置、プロジェクタ及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011218727A JP5768639B2 (ja) | 2011-09-30 | 2011-09-30 | ポインタ制御装置、プロジェクタ及びプログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015119920A Division JP6304135B2 (ja) | 2015-06-15 | 2015-06-15 | ポインタ制御装置、プロジェクタ及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013080296A true JP2013080296A (ja) | 2013-05-02 |
| JP5768639B2 JP5768639B2 (ja) | 2015-08-26 |
Family
ID=48526632
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011218727A Active JP5768639B2 (ja) | 2011-09-30 | 2011-09-30 | ポインタ制御装置、プロジェクタ及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5768639B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015166923A (ja) * | 2014-03-03 | 2015-09-24 | セイコーエプソン株式会社 | 位置検出装置、及び、位置検出方法 |
| JP2016122186A (ja) * | 2014-12-25 | 2016-07-07 | パナソニックIpマネジメント株式会社 | 投影装置及び投影方法 |
| JP2016177750A (ja) * | 2015-03-23 | 2016-10-06 | セイコーエプソン株式会社 | 位置検出装置、表示装置、位置検出装置の制御方法、及び、表示装置の制御方法 |
| US9654748B2 (en) | 2014-12-25 | 2017-05-16 | Panasonic Intellectual Property Management Co., Ltd. | Projection device, and projection method |
| JP2017126145A (ja) * | 2016-01-13 | 2017-07-20 | セイコーエプソン株式会社 | プロジェクター及びプロジェクターの制御方法 |
| JP2018097880A (ja) * | 2017-12-20 | 2018-06-21 | カシオ計算機株式会社 | 検出装置、検出方法及びプログラム |
| WO2020195201A1 (ja) * | 2019-03-25 | 2020-10-01 | 富士フイルム株式会社 | 投影制御装置、投影装置、投影制御方法、及び投影制御プログラム |
| CN112437283A (zh) * | 2020-11-09 | 2021-03-02 | 广景视睿科技(深圳)有限公司 | 一种调整投影抖动的方法和系统 |
| JPWO2022107537A1 (ja) * | 2020-11-18 | 2022-05-27 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07319616A (ja) * | 1994-05-26 | 1995-12-08 | Hitachi Ltd | 位置入力方法およびそれを用いた会議支援システム |
| JPH08123612A (ja) * | 1994-10-25 | 1996-05-17 | Hitachi Ltd | 位置入力方法およびそれを用いた会議支援システム |
| JPH0916332A (ja) * | 1995-06-28 | 1997-01-17 | Alps Electric Co Ltd | 座標入力装置 |
| JP2007052793A (ja) * | 2005-08-18 | 2007-03-01 | Mitsubishi Electric Research Laboratories Inc | ディスプレイ表面上にポインティングデバイスによって表示されるポインタの場所を制御するための方法 |
| JP2007257438A (ja) * | 2006-03-24 | 2007-10-04 | Casio Comput Co Ltd | ポインティング装置、外部情報処理装置、指示位置特定装置、及び指示位置特定方法 |
| JP2011150609A (ja) * | 2010-01-22 | 2011-08-04 | Kyocera Corp | 投影制御装置及び投影方法、並びに投影制御用コンピュータプログラム |
-
2011
- 2011-09-30 JP JP2011218727A patent/JP5768639B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07319616A (ja) * | 1994-05-26 | 1995-12-08 | Hitachi Ltd | 位置入力方法およびそれを用いた会議支援システム |
| JPH08123612A (ja) * | 1994-10-25 | 1996-05-17 | Hitachi Ltd | 位置入力方法およびそれを用いた会議支援システム |
| JPH0916332A (ja) * | 1995-06-28 | 1997-01-17 | Alps Electric Co Ltd | 座標入力装置 |
| JP2007052793A (ja) * | 2005-08-18 | 2007-03-01 | Mitsubishi Electric Research Laboratories Inc | ディスプレイ表面上にポインティングデバイスによって表示されるポインタの場所を制御するための方法 |
| JP2007257438A (ja) * | 2006-03-24 | 2007-10-04 | Casio Comput Co Ltd | ポインティング装置、外部情報処理装置、指示位置特定装置、及び指示位置特定方法 |
| JP2011150609A (ja) * | 2010-01-22 | 2011-08-04 | Kyocera Corp | 投影制御装置及び投影方法、並びに投影制御用コンピュータプログラム |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015166923A (ja) * | 2014-03-03 | 2015-09-24 | セイコーエプソン株式会社 | 位置検出装置、及び、位置検出方法 |
| JP2016122186A (ja) * | 2014-12-25 | 2016-07-07 | パナソニックIpマネジメント株式会社 | 投影装置及び投影方法 |
| US9654748B2 (en) | 2014-12-25 | 2017-05-16 | Panasonic Intellectual Property Management Co., Ltd. | Projection device, and projection method |
| JP2016177750A (ja) * | 2015-03-23 | 2016-10-06 | セイコーエプソン株式会社 | 位置検出装置、表示装置、位置検出装置の制御方法、及び、表示装置の制御方法 |
| JP2017126145A (ja) * | 2016-01-13 | 2017-07-20 | セイコーエプソン株式会社 | プロジェクター及びプロジェクターの制御方法 |
| JP2018097880A (ja) * | 2017-12-20 | 2018-06-21 | カシオ計算機株式会社 | 検出装置、検出方法及びプログラム |
| WO2020195201A1 (ja) * | 2019-03-25 | 2020-10-01 | 富士フイルム株式会社 | 投影制御装置、投影装置、投影制御方法、及び投影制御プログラム |
| US11587534B2 (en) | 2019-03-25 | 2023-02-21 | Fujifilm Corporation | Projection control device, projection apparatus, projection control method, and projection control program |
| CN112437283A (zh) * | 2020-11-09 | 2021-03-02 | 广景视睿科技(深圳)有限公司 | 一种调整投影抖动的方法和系统 |
| CN112437283B (zh) * | 2020-11-09 | 2022-06-10 | 广景视睿科技(深圳)有限公司 | 一种调整投影抖动的方法和系统 |
| JPWO2022107537A1 (ja) * | 2020-11-18 | 2022-05-27 | ||
| WO2022107537A1 (ja) * | 2020-11-18 | 2022-05-27 | 富士フイルム株式会社 | 制御装置、制御方法、制御プログラム、及び投影システム |
| JP7314425B2 (ja) | 2020-11-18 | 2023-07-25 | 富士フイルム株式会社 | 制御装置、制御方法、制御プログラム、及び投影システム |
| US12112664B2 (en) | 2020-11-18 | 2024-10-08 | Fujifilm Corporation | Control device, control method, control program, and projection system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5768639B2 (ja) | 2015-08-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5768639B2 (ja) | ポインタ制御装置、プロジェクタ及びプログラム | |
| US10663844B2 (en) | Projection control apparatus and control method thereof, and projection system | |
| US10284831B2 (en) | Projection system, projector apparatus, image capturing apparatus, and projection method | |
| US20110134252A1 (en) | Information processing apparatus and control method thereof | |
| JP6015037B2 (ja) | 画像処理装置、画像処理方法、およびプロジェクター | |
| US20150237317A1 (en) | Projection system and projection method | |
| US8711225B2 (en) | Image-capturing device and projection automatic calibration method of projection device | |
| US9906762B2 (en) | Communication apparatus, method of controlling communication apparatus, non-transitory computer-readable storage medium | |
| JP5870586B2 (ja) | プロジェクタ制御装置、表示装置及びプログラム。 | |
| CN111694528A (zh) | 显示墙的排版辨识方法以及使用此方法的电子装置 | |
| JP2020178248A (ja) | 投影制御装置、投影制御方法、投影システム、プログラム、記憶媒体 | |
| JP2019204034A (ja) | 投影制御装置、その制御方法、投影システム、プログラムおよび記憶媒体 | |
| JP6304135B2 (ja) | ポインタ制御装置、プロジェクタ及びプログラム | |
| JP2020178221A (ja) | 投影制御装置、投影制御方法およびプログラム | |
| JP2015139087A (ja) | 投影装置 | |
| CN116156132B (zh) | 投影图像校正方法、装置、电子设备及可读存储介质 | |
| US10225480B2 (en) | Terminal device, method for acquiring drawing target, and computer-readable recording medium | |
| JP5664725B2 (ja) | プロジェクター、画像投写システムおよび画像投写方法 | |
| JP5970873B2 (ja) | 画像処理装置、画像処理方法、およびプロジェクター | |
| JP2015053734A (ja) | プロジェクター、画像投写システムおよび画像投写方法 | |
| JP2014187515A (ja) | プロジェクター及びプロジェクターの制御方法 | |
| JP6500974B2 (ja) | 検出装置、検出方法及びプログラム | |
| US9761159B2 (en) | Image processor, image projector, and image processing method | |
| JP2016114991A (ja) | 位置検出装置、画像投写装置及び画像操作システム | |
| US9787961B2 (en) | Projector and method for controlling projector |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150526 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150608 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5768639 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |