JP2012500406A - 位置決めシステム - Google Patents
位置決めシステム Download PDFInfo
- Publication number
- JP2012500406A JP2012500406A JP2011522514A JP2011522514A JP2012500406A JP 2012500406 A JP2012500406 A JP 2012500406A JP 2011522514 A JP2011522514 A JP 2011522514A JP 2011522514 A JP2011522514 A JP 2011522514A JP 2012500406 A JP2012500406 A JP 2012500406A
- Authority
- JP
- Japan
- Prior art keywords
- positioning system
- positioning
- object carrier
- carrier device
- drive mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000005259 measurement Methods 0.000 claims abstract description 32
- 239000002131 composite material Substances 0.000 description 14
- 230000033001 locomotion Effects 0.000 description 11
- 230000003287 optical effect Effects 0.000 description 5
- 230000005484 gravity Effects 0.000 description 3
- 230000002411 adverse Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 238000000386 microscopy Methods 0.000 description 2
- 238000004873 anchoring Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000000339 bright-field microscopy Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000004801 process automation Methods 0.000 description 1
- 210000002105 tongue Anatomy 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/24—Base structure
- G02B21/26—Stages; Adjusting means therefor
Landscapes
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Microscoopes, Condenser (AREA)
- Control Of Position Or Direction (AREA)
- Instruments For Measurement Of Length By Optical Means (AREA)
Abstract
Description
Claims (16)
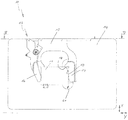
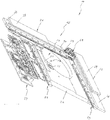
- 対象物(11)を技術的機器、特に、観察、計測、または処理システム等に対して相対的に位置決めする位置決めシステム(10)であって、
位置決めされる対象物を受けるオブジェクトキャリア装置(13)、および
上記オブジェクトキャリア装置を位置決めする位置決め装置(12)、
を含み、
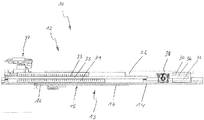
上記位置決め装置は、オブジェクトキャリア装置を駆動する駆動機構を有し、
上記駆動機構は、オブジェクトキャリア装置の2軸方向の位置決めが可能になるように配置された2つのリニアモータ(21,22)を有し、
上記位置決め装置は、計測機構(23)を有し、
上記駆動機構と計測機構とが、位置決め装置の参照基部(26)とオブジェクトキャリア装置との間に横たわるように配置されていることを特徴とする位置決めシステム。 - 請求項1の位置決めシステムであって、
位置決め装置(12)の参照基部(26)に対するオブジェクトキャリア装置(13)の明示されていない位置の絶対値が、計測装置(23)によって直接決定され得ることを特徴とする位置決めシステム。 - 請求項1および請求項2のうち何れか1項の位置決めシステムであって、
計測装置(23)は、磁気計測装置であることを特徴とする位置決めシステム。 - 請求項1から請求項3のうち何れか1項の位置決めシステムであって、
計測装置は2つの計測ユニットを含むことを特徴とする位置決めシステム。 - 請求項4の位置決めシステムであって、
計測ユニットは、互いに相対移動可能なセンサユニット(25)と、スケール(24)とを含むことを特徴とする位置決めシステム。 - 請求項5の位置決めシステムであって、
スケール(24)は、複数の磁気トラックを含むことを特徴とする位置決めシステム。 - 請求項1から請求項6のうち何れか1項の位置決めシステムであって、
オブジェクトキャリア装置(13)は、位置決め装置(12)の固定装置によって固定され得ることを特徴とする位置決めシステム。 - 請求項7の位置決めシステムであって、
固定装置は、電磁石(38)を含むことを特徴とする位置決めシステム。 - 請求項1から請求項8のうち何れか1項の位置決めシステムであって、
位置決め装置を制御するための制御装置(37)が位置決め装置(12)に組み込まれていることを特徴とする位置決めシステム。 - 請求項9の位置決めシステムであって、
駆動機構によって加えられる力が制御装置(37)によって制限され得ることを特徴とする位置決めシステム。 - 請求項9および請求項10のうち何れか1項の位置決めシステムであって、
駆動機構、計測装置(23)、および制御装置(37)の接続ケーブルが固定的に配置されていることを特徴とする位置決めシステム。 - 請求項9および請求項11のうち何れか1項の位置決めシステムであって、
位置決め装置(12)は、計測装置(23)または制御装置(37)によって位置の解析が行われ得るように構成されていることを特徴とする位置決めシステム。 - 請求項1から請求項12のうち何れか1項の位置決めシステムであって、
オブジェクトキャリア装置(13)のエンド位置において、対象物(11)が自動的に位置決めシステム(10)によって掴まれ得る事を特徴とする位置決めシステム。 - 請求項1から請求項13のうち何れか1項の位置決めシステムであって、
オブジェクトキャリア装置(13)は、顕微鏡テーブル(14)を含むことを特徴とする位置決めシステム。 - 請求項14の位置決めシステムであって、
オブジェクトキャリア装置(13)がサンプルホルダ(15)を含むことを特徴とする位置決めシステム。 - 請求項15の位置決めシステムであって、
サンプルホルダ(15)が駆動機構のリニアモータ(21)に直接結合されていることを特徴とする位置決めシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102008037876.3 | 2008-08-15 | ||
| DE102008037876.3A DE102008037876B4 (de) | 2008-08-15 | 2008-08-15 | Positioniersystem für einen Mikroskoptisch |
| PCT/EP2009/060480 WO2010018206A1 (de) | 2008-08-15 | 2009-08-13 | Positioniersystem |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012500406A true JP2012500406A (ja) | 2012-01-05 |
Family
ID=41327621
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011522514A Pending JP2012500406A (ja) | 2008-08-15 | 2009-08-13 | 位置決めシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20110164316A1 (ja) |
| EP (1) | EP2313805A1 (ja) |
| JP (1) | JP2012500406A (ja) |
| DE (1) | DE102008037876B4 (ja) |
| WO (1) | WO2010018206A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011077726A1 (de) * | 2011-06-17 | 2012-12-20 | Itk Dr. Kassen Gmbh | Positioniersystem |
| JP2013137393A (ja) * | 2011-12-28 | 2013-07-11 | Canon Inc | 顕微鏡 |
| DE102012007134B3 (de) * | 2012-04-10 | 2013-05-16 | Märzhäuser Wetzlar GmbH & Co. KG | Objektträger-Bevorratungs- und -Bereitstellungs-Vorrichtung |
| DE102012103554B4 (de) | 2012-04-23 | 2015-01-15 | Carl Zeiss Industrielle Messtechnik Gmbh | Koordinatenmessgerät |
| JP6270560B2 (ja) * | 2014-03-14 | 2018-01-31 | オリンパス株式会社 | 培養顕微鏡 |
| DE102017215104A1 (de) | 2017-08-30 | 2019-02-28 | Robert Bosch Gmbh | Streckenanordnung für einen Linearmotor und Primärteil |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0627387A (ja) * | 1992-07-08 | 1994-02-04 | Olympus Optical Co Ltd | 電動ステージ |
| JPH0755408A (ja) * | 1993-06-11 | 1995-03-03 | Dr Johannes Heidenhain Gmbh | 位置測定装置 |
| JP2005265996A (ja) * | 2004-03-16 | 2005-09-29 | Olympus Corp | 顕微鏡ステージ |
| JP2008014913A (ja) * | 2006-07-10 | 2008-01-24 | Olympus Corp | 電動テーブル装置及び顕微鏡ステージ |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DD204553A1 (de) * | 1981-12-30 | 1983-11-30 | Rathenower Optische Werke Veb | Kreuztisch fuer mikroskope |
| JPH02184281A (ja) * | 1989-01-10 | 1990-07-18 | Fanuc Ltd | 誤差過大アラーム発生方法 |
| JPH03202714A (ja) * | 1989-12-29 | 1991-09-04 | Canon Inc | アブソリュート型光学式リニアエンコーダ |
| JPH08275490A (ja) * | 1995-03-31 | 1996-10-18 | Minolta Co Ltd | エンコーダ付き電動モータ |
| JP3114579B2 (ja) * | 1995-08-30 | 2000-12-04 | 松下電器産業株式会社 | 産業用ロボットおよびその制御装置 |
| JP3832891B2 (ja) * | 1996-03-28 | 2006-10-11 | 日本トムソン株式会社 | リニア電磁アクチュエータを用いたxyテーブル |
| US6193199B1 (en) * | 1998-07-15 | 2001-02-27 | Nanomotion, Inc. | Sample stage including a slider assembly |
| DE10232242A1 (de) * | 2002-07-17 | 2004-02-05 | Leica Microsystems Semiconductor Gmbh | Verfahren und Vorrichtung zum Rastern einer Probe mit einem optischen ab Bildungssystem |
| US7180430B2 (en) * | 2004-11-01 | 2007-02-20 | Avago Technologies Ecbu Ip (Singapore) Pte. Ltd. | Low-cost absolute linear optical encoder |
-
2008
- 2008-08-15 DE DE102008037876.3A patent/DE102008037876B4/de active Active
-
2009
- 2009-08-13 WO PCT/EP2009/060480 patent/WO2010018206A1/de not_active Ceased
- 2009-08-13 EP EP09781788A patent/EP2313805A1/de not_active Withdrawn
- 2009-08-13 US US13/058,517 patent/US20110164316A1/en not_active Abandoned
- 2009-08-13 JP JP2011522514A patent/JP2012500406A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0627387A (ja) * | 1992-07-08 | 1994-02-04 | Olympus Optical Co Ltd | 電動ステージ |
| JPH0755408A (ja) * | 1993-06-11 | 1995-03-03 | Dr Johannes Heidenhain Gmbh | 位置測定装置 |
| JP2005265996A (ja) * | 2004-03-16 | 2005-09-29 | Olympus Corp | 顕微鏡ステージ |
| JP2008014913A (ja) * | 2006-07-10 | 2008-01-24 | Olympus Corp | 電動テーブル装置及び顕微鏡ステージ |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102008037876A1 (de) | 2010-03-04 |
| EP2313805A1 (de) | 2011-04-27 |
| WO2010018206A1 (de) | 2010-02-18 |
| DE102008037876B4 (de) | 2014-10-30 |
| US20110164316A1 (en) | 2011-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11867666B2 (en) | Measuring system, measuring arrangement and method for determining measuring signals during a penetration movement of a penetration body into a surface of a test body | |
| CN109632458B (zh) | 结合测试设备和方法 | |
| JP2012500406A (ja) | 位置決めシステム | |
| CN102906533B (zh) | 具有可互换任务模块配重的坐标测量机器 | |
| CN101196393B (zh) | 用于坐标测量机及相应工具的工具架 | |
| EP2821770B1 (en) | Cartridge for a bond testing machine comprising a plurality of test tools | |
| JP4960386B2 (ja) | 顕微鏡用の制御装置 | |
| US11016261B2 (en) | Actuator with shape-memory element | |
| SE536708C2 (sv) | Metod och system för bestämning av minst en egenskap hos enmanipulator | |
| KR20190022318A (ko) | 갠트리 타입의 위치 결정 장치 | |
| KR102338759B1 (ko) | 계측 시스템 | |
| WO2018156662A1 (en) | Dual-axis linear motion system | |
| US20050006986A1 (en) | Micromanupulator including piezoelectric benders | |
| US8019448B2 (en) | Stage device | |
| JP6865963B2 (ja) | プローブユニット及びプリント配線板検査装置 | |
| US7489054B2 (en) | Planar direct drive unit comprising a position measuring system | |
| JP2005265996A (ja) | 顕微鏡ステージ | |
| NL1044707B1 (en) | Sample Manipulator for ultra-high vacuum and/or cryogenic environment | |
| JP2025171207A (ja) | 自立薄膜の力学試験システム | |
| JP7840203B2 (ja) | ステージ装置、荷電粒子線装置、及び光学式検査装置 | |
| JP4493355B2 (ja) | 顕微鏡用電動ステージ | |
| JP2019072836A (ja) | 器具の位置決め用装置 | |
| CN109991726A (zh) | 一种物镜转塔、成像组件及显微镜 | |
| JP2007183189A (ja) | 形状測定装置 | |
| JPH08152397A (ja) | 外部観察式環境試験装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120718 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120718 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20120718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130723 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131003 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131010 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140204 |