JP2012204987A - 撮像装置、同期制御方法、再生装置及び立体映像撮像システム - Google Patents
撮像装置、同期制御方法、再生装置及び立体映像撮像システム Download PDFInfo
- Publication number
- JP2012204987A JP2012204987A JP2011066254A JP2011066254A JP2012204987A JP 2012204987 A JP2012204987 A JP 2012204987A JP 2011066254 A JP2011066254 A JP 2011066254A JP 2011066254 A JP2011066254 A JP 2011066254A JP 2012204987 A JP2012204987 A JP 2012204987A
- Authority
- JP
- Japan
- Prior art keywords
- processing
- vertical synchronization
- camera
- synchronization signal
- frames
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/296—Synchronisation thereof; Control thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two 2D image sensors having a relative position equal to or related to the interocular distance
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Abstract
【解決手段】第1のカメラ1は、操作部11と、垂直同期信号毎に第1の処理フレームで映像信号を出力する第1の撮像素子を有する撮像部の動作を制御するカメラ制御部13を有する。そして、第1のカメラ1は、第2のカメラ2が所定期間の経過後に指示された動作を開始するタイミング及び操作入力による指示を第2のカメラ2通知すると共に、操作入力がされた時点より所定期間の経過後に通知した動作を行う。これにより、第1のカメラ1及び第2のカメラ2は、操作入力によって指示される処理の開始又は停止を同時に行うことを可能とする。
【選択図】図2
Description
1.一実施の形態(2台のカメラの同期制御:立体映像撮像システムの例)
2.変形例
[2台のカメラの同期制御の例]
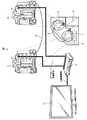
立体映像撮像システム10は、1秒間に同一のフレーム数で同一の画サイズの2次元映像を撮像する撮像装置として第1のカメラ1及び第2のカメラ2を備える。第1のカメラ1及び第2のカメラ2は、共通するライン端子を備える。そして、第1のカメラ1及び第2のカメラ2は、このライン端子に接続され、シリアル通信が可能な同期制御ライン3によって、互いに映像の記録又は再生等の処理をフレーム単位で同期する制御を行う同期制御信号を通信パケットに入れて送受信できる。
第1のカメラ1と第2のカメラ2は、共に同じ機能ブロックを有する。このため、以下の説明では、第1のカメラ1の内部構成例について説明する。以下の説明では、第1のカメラ1の処理を説明するため、第1のカメラ1を「自機」と呼び、第2のカメラ2を「他機」と呼ぶ場合がある。
図3Aは、第1のカメラ1及び第2のカメラ2の同期を制御していない状態におけるタイミングチャートの例を示す。
第1のカメラ1及び第2のカメラ2は、それぞれ異なるタイミングで発生した垂直同期信号を開始のタイミングを合わせるために利用し、隣り合う垂直同期信号の期間内で定まる処理フレームに基づいて撮像又は再生の処理を行う。第1のカメラ1及び第2のカメラ2は、同じフレームレートの処理フレームで動作するが、例えば、ユーザが各カメラの操作部11を操作して電源をオンしたタイミングは厳密に合わせることが困難であり、処理フレームが立ち上がるタイミングが異なる。このため、従来のように処理フレームが開始したタイミングが異なったまま被写体を撮像すると、撮像後に処理の開始又は停止を合わせる作業が必要であった。
本例では、第1のカメラ1の処理フレームの開始タイミングに第2のカメラ2の処理フレームの開始タイミングを合わせる制御を行っており、第1のカメラ1の垂直同期信号を処理フレームの開始タイミングを合わせる同期信号として用いている。そして、第2のカメラ2は、同期制御ライン3を介して第1のカメラ1から伝送される同期制御信号により処理フレームのゲンロックを行う。なお、第1のカメラ1及び第2のカメラ2は同じ構成としたカメラであるので、第2のカメラ2の処理フレームを同期信号として利用して第1のカメラ1の処理フレームをゲンロックすることも可能である。
始めに、第1のカメラ1は、処理フレームの最初のタイミングとして垂直同期信号が発生した瞬間に、計数した垂直同期信号カウンタ値を、同期制御ライン3を経由して第2のカメラ2に通知する。この垂直同期信号カウンタ値は、処理フレームのカウンタ値カウンタ値として用いられる
図3Bに示したように、第1のカメラ1の同期制御部17は、差分値Δを把握している。ここで、図3Cでは、説明の便宜のため、第1のカメラ1の処理フレームをx,x+1,…と数え、第2のカメラ2の処理フレームをy,y+1,…と数える。
始めに、第1のカメラ1及び第2のカメラ2のライン端子に同期制御ライン3が接続されると、ユーザによって行われる不図示のメニュー画面を用いた操作部11の操作入力により、同期制御ラインモードがオンされる(ステップS1)。同期制御ラインモードがオンされると、第1のカメラ1がメイン、第2のカメラ2がサブとする主従関係の下、第1のカメラ1及び第2のカメラ2の間で映像の撮像処理又は映像の再生処理をカメラ毎の処理フレームで同期して行うことが可能となる。一方、同期制御ラインモードがオフされると、各カメラは独立して動作するため、互いに影響を与えない。
始めに、同期制御部17は、撮像素子が発生する垂直同期信号の割り込みを待つ(ステップS11)。垂直同期信号の割り込みが発生すると、垂直同期信号カウンタ20がRAM14に垂直同期信号カウンタ値を書き込む。そして、同期制御部17は、垂直同期信号カウンタをRAM14から取得する(ステップS12)。
始めに、同期制御部17は、ユーザの操作入力により発生する操作信号からなる動作指示を待つ(ステップS21)。ただし、ユーザからの動作指示は、処理フレームのどのタイミングで来るかが不定である。このため、同期制御部17は動作指示を受けた後、垂直同期信号が発生するタイミングである処理フレームの先頭から指示された動作を開始できるように、第2のカメラ2との間で垂直同期信号が同じタイミングで発生するようにゲンロックを行っている。
始めに、第1のカメラ1の同期制御部17は、送受信制御部19から受け取る垂直同期信号カウンタ値の受信を待つ(ステップS31)。第2のカメラ2から垂直同期信号カウンタ値が受信されなければ処理を終了する。
また、上述した実施の形態では、第1のカメラ1及び第2のカメラ2を上下方向に設置した例を説明したが、第1のカメラ1及び第2のカメラ2の筐体を小型化することにより、水平方向に並べて設置してもよい。
(1)操作入力により動作を指示する操作部と、
レンズを介して入射する被写体の入射光により第1の処理フレームの間に挿入されている垂直同期信号毎に前記第1の処理フレームで映像信号を出力する第1の撮像素子を有する撮像部の動作を制御する撮像制御部と、
前記撮像素子が発生させる前記垂直同期信号の発生回数を計数する計数部と、
制御信号を伝送する制御ラインで接続される他の撮像装置であって、前記他の撮像装置が有する第2の撮像素子が発生させ、前記他の撮像装置から通知される第2の処理フレームの間に挿入されている垂直同期信号の発生回数と、前記第1の処理フレームの間に挿入されている垂直同期信号の発生回数との差分値により前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を算出し、前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数に基づいて、前記他の撮像装置が所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示を前記他の撮像装置に通知すると共に、前記操作入力がされた時点より前記所定期間の経過後に通知した前記動作を行う制御部と、を備える
撮像装置。
(2)前記計数部は、前記撮像素子が発生させる前記垂直同期信号の発生回数を前記第1の処理フレームのフレーム数として計数し、
前記制御部は、前記第1の処理フレームの垂直同期信号と前記第2の処理フレームの垂直同期信号が発生するタイミングを予め合わせ、前記他の撮像装置が前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を前記第2の処理フレームのフレーム数として計数する場合に、前記第2の撮像素子が前記垂直同期信号を発生させる度に前記他の撮像装置から受け取った前記第2の処理フレームのフレーム数と、前記第1の処理フレームのフレーム数との間で算出したフレーム数の差分値が複数のフレーム期間で一定である場合に算出した前記第2の処理フレームのフレーム数に前記複数のフレーム期間を加えたフレーム数を前記他の撮像装置が動作を開始するタイミングとして前記他の撮像装置に通知する
前記(1)記載の撮像装置。
(3)前記制御部は、前記第1の処理フレームの期間内に前記第1の処理フレームのフレーム数を前記他の撮像装置に通知できない場合、又は前記他の撮像装置から前記第1の処理フレームの期間内に前記第2の処理フレームのフレーム数を受け取ることができない場合に、前記第1の処理フレームに続くフレーム期間にわたって前記第1の処理フレームのフレーム数を前記他の撮像装置に通知し、又は前記他の撮像装置から前記第2の処理フレームのフレーム数を受け取る
前記(1)又は(2)記載の撮像装置。
(4)前記制御部は、所定の回数以上にわたって求めた前記差分値とは異なる第2の差分値を前記所定の回数未満にわたって求めた場合に、前記第2の差分値を破棄する
前記(1)〜(3)のいずれかに記載の撮像装置。
(5)前記操作部の操作入力によって指示される動作には、撮像の開始若しくは停止のいずれかが含まれ、前記第1及び第2の処理フレームには、撮像フレーム又は再生フレームのいずれかが含まれる
前記(1)〜(3)のいずれかに記載の撮像装置。
(6)操作入力により動作を指示することと、
レンズを介して入射する被写体の入射光により第1の処理フレームの間に挿入されている垂直同期信号毎に前記第1の処理フレームで映像信号を出力する第1の撮像素子を有する撮像部の動作を制御することと、
前記撮像素子が発生させる前記垂直同期信号の発生回数を計数することと、
制御信号を伝送する制御ラインで接続される他の撮像装置であって、前記他の撮像装置が有する第2の撮像素子が発生させ、前記他の撮像装置から通知される第2の処理フレームの間に挿入されている垂直同期信号の発生回数と、前記第1の処理フレームの間に挿入されている垂直同期信号の発生回数との差分値により前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を算出し、前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数に基づいて、前記他の撮像装置が所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示を前記他の撮像装置に通知すると共に、前記操作入力がされた時点より前記所定期間の経過後に通知した前記動作を行うことと、を含む
同期制御方法。
(7)操作入力により動作を指示する操作部と、
記録部から読み出されて再生される映像信号の第1の処理フレームの間に挿入されている垂直同期信号の発生回数を計数する計数部と、
制御信号を伝送する制御ラインで接続される他の再生装置であって、前記他の再生装置が有する第2の撮像素子が発生させ、前記他の再生装置から通知される第2の処理フレームの間に挿入されている垂直同期信号の発生回数と、第1の処理フレームの間に挿入されている垂直同期信号の発生回数との差分値により前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を算出し、前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数に基づいて、前記他の再生装置が所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示を前記他の再生装置に通知すると共に、前記操作入力がされた時点より前記所定期間の経過後に通知した前記動作を行う制御部と、を備える
再生装置。
(8)操作入力により動作を指示する第1の操作部と、
レンズを介して入射する被写体の入射光により第1の処理フレームの間に挿入されている垂直同期信号毎に前記第1の処理フレームで映像信号を出力する第1の撮像素子を有する撮像部の動作を制御する第1の撮像制御部と、
前記第1の撮像素子が発生させる前記垂直同期信号の発生回数を計数する第1の計数部と、
制御信号を伝送する制御ラインで接続される第2の撮像装置であって、前記第2の撮像装置が有する第2の撮像素子が発生させ、前記第2の撮像装置から通知される第2の処理フレームの間に挿入されている垂直同期信号の発生回数と、前記第1の処理フレームの間に挿入されている垂直同期信号の発生回数との差分値により前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を算出し、前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数に基づいて、前記第2の撮像装置が所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示を前記第2の撮像装置に通知すると共に、前記操作入力がされた時点より前記所定期間の経過後に通知した前記動作を行う第1の制御部と、を有する第1の撮像装置と、
レンズを介して入射する被写体の入射光により第2の処理フレームの間に挿入されている垂直同期信号毎に前記第2の処理フレームで映像信号を出力する第2の撮像素子を有する第2の撮像部の動作を制御する第2の撮像制御部と、
前記撮像素子が発生させる前記垂直同期信号の発生回数を計数する第1の計数部と、
前記第2の撮像素子が発生させる前記垂直同期信号の発生回数を計数する第2の計数部と、
前記第1の撮像装置に第2の処理フレームの間に挿入されている垂直同期信号の発生回数を通知し、前記第1の撮像装置から受け取った前記所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示に基づいて、前記操作入力がされた時点より前記所定期間の経過後に指示された動作を行う第2の制御部と、を有する第2の撮像装置と、を備える
立体映像撮像システム。
Claims (8)
- 操作入力により動作を指示する操作部と、
レンズを介して入射する被写体の入射光により第1の処理フレームの間に挿入されている垂直同期信号毎に前記第1の処理フレームで映像信号を出力する第1の撮像素子を有する撮像部の動作を制御する撮像制御部と、
前記撮像素子が発生させる前記垂直同期信号の発生回数を計数する計数部と、
制御信号を伝送する制御ラインで接続される他の撮像装置であって、前記他の撮像装置が有する第2の撮像素子が発生させ、前記他の撮像装置から通知される第2の処理フレームの間に挿入されている垂直同期信号の発生回数と、前記第1の処理フレームの間に挿入されている垂直同期信号の発生回数との差分値により前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を算出し、前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数に基づいて、前記他の撮像装置が所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示を前記他の撮像装置に通知すると共に、前記操作入力がされた時点より前記所定期間の経過後に通知した前記動作を行う制御部と、を備える
撮像装置。 - 前記計数部は、前記撮像素子が発生させる前記垂直同期信号の発生回数を前記第1の処理フレームのフレーム数として計数し、
前記制御部は、前記第1の処理フレームの垂直同期信号と前記第2の処理フレームの垂直同期信号が発生するタイミングを予め合わせ、前記他の撮像装置が前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を前記第2の処理フレームのフレーム数として計数する場合に、前記第2の撮像素子が前記垂直同期信号を発生させる度に前記他の撮像装置から受け取った前記第2の処理フレームのフレーム数と、前記第1の処理フレームのフレーム数との間で算出したフレーム数の差分値が複数のフレーム期間で一定である場合に算出した前記第2の処理フレームのフレーム数に前記複数のフレーム期間を加えたフレーム数を前記他の撮像装置が動作を開始するタイミングとして前記他の撮像装置に通知する
請求項1記載の撮像装置。 - 前記制御部は、前記第1の処理フレームの期間内に前記第1の処理フレームのフレーム数を前記他の撮像装置に通知できない場合、又は前記他の撮像装置から前記第1の処理フレームの期間内に前記第2の処理フレームのフレーム数を受け取ることができない場合に、前記第1の処理フレームに続くフレーム期間にわたって前記第1の処理フレームのフレーム数を前記他の撮像装置に通知し、又は前記他の撮像装置から前記第2の処理フレームのフレーム数を受け取る
請求項2記載の撮像装置。 - 前記制御部は、所定の回数以上にわたって求めた前記差分値とは異なる第2の差分値を前記所定の回数未満にわたって求めた場合に、前記第2の差分値を破棄する
請求項3記載の撮像装置。 - 前記操作部の操作入力によって指示される動作には、撮像の開始若しくは停止のいずれかが含まれ、前記第1及び第2の処理フレームには、撮像フレーム又は再生フレームのいずれかが含まれる
請求項4記載の撮像装置。 - 操作入力により動作を指示することと、
レンズを介して入射する被写体の入射光により第1の処理フレームの間に挿入されている垂直同期信号毎に前記第1の処理フレームで映像信号を出力する第1の撮像素子を有する撮像部の動作を制御することと、
前記撮像素子が発生させる前記垂直同期信号の発生回数を計数することと、
制御信号を伝送する制御ラインで接続される他の撮像装置であって、前記他の撮像装置が有する第2の撮像素子が発生させ、前記他の撮像装置から通知される第2の処理フレームの間に挿入されている垂直同期信号の発生回数と、前記第1の処理フレームの間に挿入されている垂直同期信号の発生回数との差分値により前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を算出し、前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数に基づいて、前記他の撮像装置が所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示を前記他の撮像装置に通知すると共に、前記操作入力がされた時点より前記所定期間の経過後に通知した前記動作を行うことと、を含む
同期制御方法。 - 操作入力により動作を指示する操作部と、
記録部から読み出されて再生される映像信号の第1の処理フレームの間に挿入されている垂直同期信号の発生回数を計数する計数部と、
制御信号を伝送する制御ラインで接続される他の再生装置であって、前記他の再生装置が有する撮像素子が発生させ、前記他の再生装置から通知される第2の処理フレームの間に挿入されている垂直同期信号の発生回数と、前記第1の処理フレームの間に挿入されている垂直同期信号の発生回数との差分値により前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を算出し、前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数に基づいて、前記他の再生装置が所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示を前記他の再生装置に通知すると共に、前記操作入力がされた時点より前記所定期間の経過後に通知した前記動作を行う制御部と、を備える
再生装置。 - 操作入力により動作を指示する第1の操作部と、
レンズを介して入射する被写体の入射光により第1の処理フレームの間に挿入されている垂直同期信号毎に前記第1の処理フレームで映像信号を出力する第1の撮像素子を有する撮像部の動作を制御する第1の撮像制御部と、
前記第1の撮像素子が発生させる前記垂直同期信号の発生回数を計数する第1の計数部と、
制御信号を伝送する制御ラインで接続される第2の撮像装置であって、前記第2の撮像装置が有する第2の撮像素子が発生させ、前記第2の撮像装置から通知される第2の処理フレームの間に挿入されている垂直同期信号の発生回数と、前記第1の処理フレームの間に挿入されている垂直同期信号の発生回数との差分値により前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数を算出し、前記第2の処理フレームの間に挿入されている垂直同期信号の発生回数に基づいて、前記第2の撮像装置が所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示を前記第2の撮像装置に通知すると共に、前記操作入力がされた時点より前記所定期間の経過後に通知した前記動作を行う第1の制御部と、を有する第1の撮像装置と、
レンズを介して入射する被写体の入射光により第2の処理フレームの間に挿入されている垂直同期信号毎に前記第2の処理フレームで映像信号を出力する第2の撮像素子を有する第2の撮像部の動作を制御する第2の撮像制御部と、
前記撮像素子が発生させる前記垂直同期信号の発生回数を計数する第1の計数部と、
前記第2の撮像素子が発生させる前記垂直同期信号の発生回数を計数する第2の計数部と、
前記第1の撮像装置に第2の処理フレームの間に挿入されている垂直同期信号の発生回数を通知し、前記第1の撮像装置から受け取った前記所定期間の経過後に指示された動作を開始するタイミング及び前記操作入力による指示に基づいて、前記操作入力がされた時点より前記所定期間の経過後に指示された動作を行う第2の制御部と、を有する第2の撮像装置と、を備える
立体映像撮像システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011066254A JP2012204987A (ja) | 2011-03-24 | 2011-03-24 | 撮像装置、同期制御方法、再生装置及び立体映像撮像システム |
| US13/415,995 US20120242805A1 (en) | 2011-03-24 | 2012-03-09 | Imaging device, synchronization control method, reproduction device, and stereoscopic video imaging system |
| CN2012100791583A CN102695068A (zh) | 2011-03-24 | 2012-03-16 | 成像设备、同步控制方法、再现设备和立体视频成像系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011066254A JP2012204987A (ja) | 2011-03-24 | 2011-03-24 | 撮像装置、同期制御方法、再生装置及び立体映像撮像システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012204987A true JP2012204987A (ja) | 2012-10-22 |
| JP2012204987A5 JP2012204987A5 (ja) | 2014-04-10 |
Family
ID=46860330
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011066254A Pending JP2012204987A (ja) | 2011-03-24 | 2011-03-24 | 撮像装置、同期制御方法、再生装置及び立体映像撮像システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20120242805A1 (ja) |
| JP (1) | JP2012204987A (ja) |
| CN (1) | CN102695068A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9661191B2 (en) | 2014-11-19 | 2017-05-23 | Casio Computer Co., Ltd. | Image capture apparatus having function of generating frame synchronization signal at constant cycle |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5709545B2 (ja) * | 2011-01-18 | 2015-04-30 | キヤノン株式会社 | 撮像装置 |
| JP5821300B2 (ja) | 2011-06-07 | 2015-11-24 | ソニー株式会社 | 撮像装置及び撮像方法 |
| JP5927795B2 (ja) * | 2011-07-22 | 2016-06-01 | ソニー株式会社 | 立体映像撮像システム、記録制御方法、立体映像再生システム及び再生制御方法 |
| US20170214903A1 (en) * | 2014-03-13 | 2017-07-27 | Sony Corporation | Imaging apparatus, imaging system, and control method for imaging apparatus |
| CN104113748A (zh) * | 2014-07-17 | 2014-10-22 | 冯侃 | 3d拍摄系统及实现方法 |
| TWI567476B (zh) | 2015-03-13 | 2017-01-21 | 鈺立微電子股份有限公司 | 影像處理裝置與影像處理方法 |
| EP3651161A1 (de) * | 2018-11-07 | 2020-05-13 | Siemens Healthcare GmbH | Verfahren, system und medizinisches bildgebungssystem zur erstellung eines abbildes von einem untersuchungsobjekt sowie verwendung derartiger abbilder |
| CN112153354B (zh) * | 2020-08-13 | 2021-07-27 | 中国科学院西安光学精密机械研究所 | 一种帧同步图像拍摄方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03185996A (ja) * | 1989-12-14 | 1991-08-13 | Konica Corp | 立体映像用ビデオカメラ |
| JP2005033607A (ja) * | 2003-07-08 | 2005-02-03 | Nippon Hoso Kyokai <Nhk> | 映像同期方法及び映像同期プログラム |
| JP2005039707A (ja) * | 2003-07-18 | 2005-02-10 | Sony Corp | 撮像装置と同期信号発生装置 |
| JP2006332803A (ja) * | 2005-05-23 | 2006-12-07 | Sony Corp | 撮像システム,撮像制御装置,垂直同期方法およびプログラム |
-
2011
- 2011-03-24 JP JP2011066254A patent/JP2012204987A/ja active Pending
-
2012
- 2012-03-09 US US13/415,995 patent/US20120242805A1/en not_active Abandoned
- 2012-03-16 CN CN2012100791583A patent/CN102695068A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03185996A (ja) * | 1989-12-14 | 1991-08-13 | Konica Corp | 立体映像用ビデオカメラ |
| JP2005033607A (ja) * | 2003-07-08 | 2005-02-03 | Nippon Hoso Kyokai <Nhk> | 映像同期方法及び映像同期プログラム |
| JP2005039707A (ja) * | 2003-07-18 | 2005-02-10 | Sony Corp | 撮像装置と同期信号発生装置 |
| JP2006332803A (ja) * | 2005-05-23 | 2006-12-07 | Sony Corp | 撮像システム,撮像制御装置,垂直同期方法およびプログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9661191B2 (en) | 2014-11-19 | 2017-05-23 | Casio Computer Co., Ltd. | Image capture apparatus having function of generating frame synchronization signal at constant cycle |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120242805A1 (en) | 2012-09-27 |
| CN102695068A (zh) | 2012-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5927795B2 (ja) | 立体映像撮像システム、記録制御方法、立体映像再生システム及び再生制御方法 | |
| JP2012204987A (ja) | 撮像装置、同期制御方法、再生装置及び立体映像撮像システム | |
| JP2011239379A (ja) | 撮像システム、撮像装置及び撮像方法 | |
| JP5970748B2 (ja) | 動画像撮影システム及び同期制御方法 | |
| JP5854832B2 (ja) | 撮像装置及び撮像方法 | |
| JP2019091973A (ja) | 撮像装置 | |
| US10708500B2 (en) | Multi-camera system, camera, processing method of camera, confirmation apparatus, and processing method of confirmation apparatus for capturing moving images | |
| JP2010157851A (ja) | カメラ及びカメラシステム | |
| WO2013069296A1 (ja) | 撮像装置、撮像システムおよびプログラム | |
| US8520087B2 (en) | Image capturing device | |
| US20130058618A1 (en) | Imaging device and imaging method | |
| CN108574802B (zh) | 图像取得装置、方法和系统、摄像装置和方法、记录介质 | |
| CN103905698A (zh) | 摄像设备 | |
| JP5587089B2 (ja) | 通信装置及び制御方法 | |
| JP5657223B2 (ja) | 撮像装置、画像再生システム及び画像再生方法 | |
| JP7214414B2 (ja) | 撮像装置 | |
| JP7001141B2 (ja) | 撮像装置、撮像方法、プログラム、及び、画像取得システム | |
| JP2019062427A (ja) | 撮像装置、撮像装置の制御方法およびプログラム | |
| JP2017017444A (ja) | 撮像装置およびその制御方法、プログラムならびにシステム | |
| JP5586403B2 (ja) | 映像データ送信装置及び映像データ送信方法 | |
| JP5930807B2 (ja) | 撮像装置 | |
| JP2011130308A (ja) | 三次元映像撮影装置、三次元映像再生装置および三次元映像システム | |
| JP2007088592A (ja) | 映像撮像記録装置 | |
| JP2018056788A (ja) | 制御装置、制御方法、及びプログラム | |
| JP2012063680A (ja) | カメラ、およびカメラ用アクセサリ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140225 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140225 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141021 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150317 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20151006 |