以下、本発明を実施するための形態について図面を参照しながら詳細に説明する。
図1及び図2に示すように、本実施形態に係るはんだ溶融装置10は、基板P上のはんだの内ごく一部のはんだを溶融させることができるはんだ溶融装置であり、この装置10を利用できる基板Pは、アルミニウム基板等の高熱伝導性を有する基板であって、主として片面にはんだが存在する基板である。
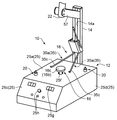
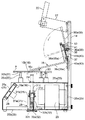
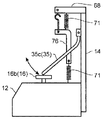
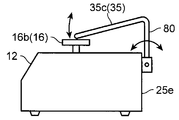
はんだ溶融装置10は、基台12と、この基台12に固定された支柱14と、基台12に支持され且つ基板Pを加熱する加熱体16と、基板Pを加熱体16に押さえ付けるための押え機構18と、基板Pを下から補助的に支持する補助支持部20と、はんだを溶融させる部位を指し示すポインタ22とを備えている。
基台12は、ケーシング25と、ケーシング25の底部25bに固定された加熱体支持部26と、を備えている。ケーシング25は、平坦な上面を有する上面部25aと、上面部25aの下方に位置する底部25bと、上面部25a及び底部25bの各前端に接続された前面部25cと、左右の側面部25dと、上面部25a及び底部25bの各後端に接続された背面部25eと、を有する。ケーシング25は、少なくとも上面部25aが磁性部材によって構成されている。上面部25aには、加熱体16を挿通させるための挿通孔25fが形成されている。前面部25cには、インジケータ25g、操作スイッチ25h等が配設されている。背面部25eには、電源スイッチ(図示省略)、電源線用インレット(図示省略)等が設けられるとともに、支柱14が固定されている。
支柱14は、ケーシング25の左右方向の中央部に配置されて、上面部25aよりも上方に延びる垂直な姿勢でケーシング25の背面部25eに固定されている。支柱14には、その長手方向に延びるように取付け溝14aが設けられている。
ケーシング25の内部には、前記加熱体支持部26の他に、制御基板28、電力調整部29等が配設されている。制御基板28は、前面部25cの裏面に固定されており、操作スイッチ25hの操作に応じて動作モードを切り替える制御、電源トランス等からなる電力調整部29による加熱体16への給電量の調整を行う制御等を実行する。
加熱体支持部26は、ケーシング25の底部25bに固定された取付け金具31と、この取付け金具31に支持されたソケット32と、を有する。取付け金具31は、一対の脚部31aと、これら脚部31aの上端部同士を接続する連結部31bとを有している。連結部31bには、加熱体16を挿通させる挿通孔31cが形成されるとともに、挿通孔31cに挿通された加熱体16を保持するニップル31dが固定されている。
ソケット32は、上向きに突出したピン端子32cを有する端子部32aと、この端子部32aを囲むように配置された筒状であり、かつ端子部32aよりも上方まで延出されたグリップ部32bとを有する。グリップ部32bは、取付け金具31の連結部31bとケーシング25の底部25bとによって狭持されている。
ケーシング25の上面部25aに形成された挿通孔25f、取付け金具31の連結部31bに形成された挿通孔31cは、端子部32aの真上に位置する。このため、両挿通孔25f,31cを通して上からグリップ部32b内に加熱体16を挿入することができ、グリップ部32bに加熱体16を挿入すると、加熱体16の端子がソケット32のピン端子32cに接続される。また、ソケット32に結合された加熱体16を上向きに引っ張ることにより、加熱体16を取り外すことができる。つまり、加熱体16は、基台12に対して着脱可能である。
加熱体16は、一方向に延びる棒状の本体部16aと、この本体部16aの一端部(先端部)に設けられた加熱部16bとを備えている。本体部16aの基端部は、加熱体支持部26のソケット32に結合される部位であり、この基端部には、ソケット32のピン端子32cに接続される端子が設けられている。本体部16a内には図略のヒータが設けられていて、ヒータは発熱部とセンサ部を有している。このセンサ部により加熱部16bの温度を検知することができる。
加熱部16bは、本体部16aの長手方向に直交する方向に広がる平板円板状に形成されている。この加熱部16bは、基板Pを局所的に支え加熱するためのものであり、その上面16cは、基板Pを載置可能な平坦面となっている。
本実施形態のはんだ溶融装置10は、図3(A)〜(D)に示すように、4種類の加熱体16を備えている。これらの加熱体16は、それぞれ加熱部16bの大きさが異なっており、用途・目的に応じて加熱体16を選択して使用することができる。例えば、最も大きな加熱部16bは、直径30mmの円板状に形成され、最も小さな加熱部16bは、直径が5mm程度となっている。なお、はんだ溶融装置10は、1つの加熱体16のみを備える構成であってもよい。
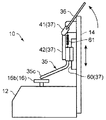
図1及び図2に示すように、基板Pを加熱体16に押さえるための押え機構18は、支柱14に取り付けられている。押え機構18は、基板Pを押圧可能な押え部35cを有する押え部材35と、押え部35cを移動させるための操作部36と、操作部36が操作されるとそれに応じて押え部35cを移動させる連動機構37と、を備えている。
図4及び図5に示すように、操作部36は、水平方向に延びる姿勢で配設された軸部36aと、この軸部36aの一端部につながり、軸部36aとは直交する方向に延びるレバー部36bとを備えている。
軸部36aは、支柱14に取り付けられた軸支部材38に保持されている。軸支部材38の一端部には、雄ねじ部38aが設けられており、この雄ねじ部38aを支柱14の取付け溝14a内に配設されたナット39に螺合することにより、軸支部材38は支柱14の所望位置に固定される。
軸支部材38の他端部には、操作部36の軸部36aを挿通させる貫通孔が形成されている。軸部36aは、この貫通孔に挿通されることにより、左右方向に延びる姿勢で配設されるとともに、軸回りに回動可能に軸支部材38によって保持されている。
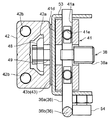
連動機構37は、操作部36の操作に応じて回動するカム41と、押え部材35を保持する保持部42と、カム41の動きを保持部42の動きに変換する伝達部材43と、を備えている。
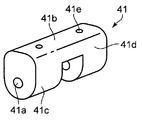
カム41は、操作部36の軸部36aに取付けられており、カム41は軸部36aと一体的に回動する。カム41は、軸部36aの長手方向に直交する方向の断面が一方向に長い形状となっている。図6にも示すように、本実施形態においては、カム41の前記断面には、軸部36aを挿通させる貫通孔41aが形成されており、この断面における長手方向(第1方向)の一端部(図6の上端部)となる端面41bは平坦面に形成され、また前記断面における長手方向の他端部(図の下端部)となる端面41cは円弧状に形成されている。そして、カム41の前記断面において長手方向に直交する方向(幅方向;第2方向)の一端部となる側面41dが平坦面に形成されている。カム41は、第1方向の他端部(端面41c)で支柱14に反力を取りつつ後述のカバー部材53を介して第1方向の一端部(端面41b)において伝達部材43を押圧する第1姿勢と、第2方向の他端部で支柱14に反力を取りつつ後述のカバー部材53を介して第2方向の一端部(側面41d)において伝達部材43を押圧する第2姿勢とを取り得る。カム41が第1姿勢にあるときには、押え部35cは後述の押え位置となり、カム41が第2姿勢にあるときには、押え部35cは後述の退避位置となる。
なお、平坦面からなる端面41bと、平坦面からなる側面41dとは、本実施形態では略直交しているが、この構成に限られるものではなく、端面41b及び側面41dのなす角度は、操作部36の操作角度に応じて適宜設定される。
カム41には、軸部36aを挿通させる貫通孔41aに直交するように、ねじ孔41eが設けられている。このねじ孔41eは、カム41を軸部36aに対して回動しないように固定するための虫ねじ(図示省略)を螺合させるために設けられている。
伝達部材43は、薄いSUS板等の撓みやすい板材(板ばね)によって構成されており、図4に示すように、平板状の基部43aと、この基部43aに対して折れ曲がった平板状の可動部43bとを有する。そして、伝達部材43は、基部43aが支柱14に沿うように配置されるとともに支柱14に取り付けられている。すなわち、伝達部材43は支柱14に支持されている。この状態で、伝達部材43の可動部43bは、支柱14に対して傾斜した状態となっている。
可動部43bは、外力を受けることにより、折れ曲がり部位すなわち基部43a及び可動部43bの接続部位を中心として揺動する。つまり可動部43bは、カム41が第1姿勢にあるか第2姿勢にあるかに応じて弾性変形量が変わり、傾斜角度(変形角度)が変わる。
基部43a(伝達部材43)を支柱14へ取付ける手段には、支柱14の取付け溝14a内に配設されたナット44と、支柱14との間に基部43aを挟み込む取付け板45と、ナット44に螺合することにより取付け板45を支柱14に固定するボルト46とが含まれる。ナット44は、取付け溝14a内をスライド可能であるため、ナット44を所望の位置に位置決めし、その位置でボルト46によって取付け板45を締め付けることにより、伝達部材43を所望の位置に固定することができる。伝達部材43を支柱14に固定する位置を調整することにより、押え部35cの高さ位置を調整することができる。
押え部材35は、本実施形態では、2つの押え棒35a,35aからなる。各押え棒35aは、例えば金属製であり、弾性的にたわみ変形可能となっている。各押え棒35aは、真っ直ぐな棒材を折り曲げてL字状に形成したものである。すなわち、各押え棒35aは、保持部42に保持される基側部35bと、この基側部35bの端部(下端部)に繋がり基側部35bに対して折り曲げられている押え部35cと、を有する。
各押え棒35aは保持部42に保持されている。保持部42は、伝達部材43の可動部43bに取り付けられている。保持部42には一方向に延びる取付け溝42aが設けられており、この取付け溝42a内に配設されたナット48に、伝達部材43を貫通するボルト49を締結することにより、保持部42は伝達部材43の可動部43bに固定されている。このため、保持部42は、可動部43bが揺動すると、可動部43bと一体的に動く。言い換えると、本実施形態において、保持部42は、伝達部材43の可動部43bが回動方向に動くことにより所定の動きを行う。
保持部42には、略上下方向(伝達部材43の可動部43bに平行な方向)に貫通する貫通孔42b,42bが2つ形成されていて、各貫通孔42bにそれぞれ押え棒35aの基側部35bが挿通されている。したがって、押え棒35aの基側部35bは、伝達部材43の可動部43bと平行な姿勢で配設されている。
押え棒35aの基側部35bは、その上端部においてナット51によって抜け止めされている。そして、押え棒35aは、基側部35bを軸として軸回りに回動可能となっている。つまり、押え部材35は、伝達部材43の可動部43bと平行な方向に延びる軸回りに回動可能である。このため、両押え部35c,35c間の間隔を変えることができる。ただし、基側部35bは、押え部35cに横から外力が加えられない限り回動することはなく、通常の状態であれば回動しない。
図2に示すように、各押え棒35aの押え部35cは、その先端が加熱体16の加熱部16bの上面16cよりも低い位置となる押え位置と、押え部35cの先端が加熱体16の加熱部16bの上面16cよりも高い位置となる退避位置と、の間で移動可能である。すなわち、カム41が第1姿勢にあるときには、押え部35cは押え位置にある。そして、カム41が第1姿勢から第2姿勢になると、カム41から受ける力によって伝達部材43の可動部43bが立ち上がる方向に動くため、押え部35cは退避位置となる。カム41が第2姿勢から第1姿勢になると、伝達部材43の可動部43bは倒れる方向に動き、押え部35cは退避位置から押え位置に移動する。押え部35cが押え位置にある場合には、押え部材35の押え部35cによって基板Pを上から押さえ付けることができ、押え部35cが退避位置にある場合には、押え部35cと基板Pとの間に隙間ができる。押え部35cは、基板Pに押さえ付けられたときに弾性的に変形して基板Pを押圧する。押圧する圧力の範囲としては、本実施例では0.7〜2.6kgfが好適である。
各押え棒35aの押え部35cは、加熱体16の加熱部16bから側方に位置ずれしたとこで基板Pを上から押さえ付ける。なお、基板Pが両押え部35c,35cによって押さえ付けられる部位の重心位置が加熱体16の加熱部16bの範囲内になるように、両押え棒35a,35aの向きを設定しておくことが望ましい。押え部材35が2つの押え棒35a,35aで構成される場合、例えば、各押え棒35aの押え部35cが加熱部16bの両側に分かれて配置され、各押え部35cによって押圧される部位同士を結ぶ線分の中央部が加熱部16bの範囲に収まるようにする。このようにすれば、基板Pが両押え棒35a,35aによって押さえ付けられた場合に傾くことがなく、基板Pを加熱部16b上面16cにより確実に密着させることができる。
なお、押え部材35は、2つの押え棒35a,35aを備えた構成に限られるものではなく、例えば、1つの部材、又は3つ以上の部材によって構成されていてもよい。押え部材35が1つの部材で構成される場合には、基板Pに接触する部位が円弧状又は環状に形成される構成であってもよい。すなわち、押さえるポイント数は1点、2点、もしくはそれ以上の数であってもよく、また押さえるポイントの形状は、点状に限られるものではなく線状であってもよい。
押え機構18には、カバー部材53およびストッパ54が設けられている。カバー部材53は、カム41を覆うように設けられており、またカバー部材53には操作部36の軸部36aを挿通する挿通孔が形成されている。ストッパ54は、操作部36材が所定範囲を超えて回動することを防止すべく設けられるものであり、カバー部材53に固定されている。本実施形態では、ストッパ54はボルト及びナットによって構成されている。
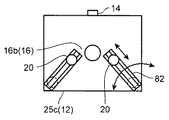
図2に示すように、加熱体16が加熱体支持部26のソケット32に保持された状態にあるときには、加熱体16の加熱部16bと基台12の上面16cとの間には隙間がある。このため、加熱体16の加熱部16b上に載置された基板Pは、基台12の上面16cから浮いた状態となる。したがって、前記補助支持部20によって基板Pを下から支持することにより、基板Pを安定した保持することができる。
補助支持部20は、本体部20aと、この本体部20aから上方に突出した状態で本体部20aに支持された支え部20bとを備えている。支え部20bは、ばね等の弾性部材によって本体部20aに対して上下動可能である。支え部20bは、基板Pが加熱体16の加熱部16bの上面16cから浮き上がった状態で基板Pを下から補助的に支持する。そして、押え部材35の押え部35cによって基板Pを上から押さえ付けた時に支え部20bが沈み込み、基板Pが加熱部16bの上面16cに密着した状態となる。図例では、支え部20bの上端が曲面形状に構成されているが、これに限られるものでない。例えば、支え部20bの上端は平面状に形成されていてもよい。
補助支持部20において基板Pと接触する部分(支え部20bの先端部)は、銅等の熱伝導率の高い材質で形成されているのが好ましい。この場合、基板Pにおいて補助支持部20が接触する部分の熱が補助支持部20に伝熱しやすくなり、加熱体16に接触する部位以外での基板Pの温度を下げ易くすることができる。
本体部20aは着磁された部材によって構成されている。このため、磁性部材によって構成されたケーシング25の上面16cに対して磁気吸着される。
ポインタ22は、支柱14に取り付けられた保持金具57に保持されている。保持金具57は、支柱14の取付け溝14a内に配設されたナットにボルトを螺合させることによって支柱14に固定されている。ポインタ22は例えばレーザを出射する構成である。ポインタ22は、加熱体16の加熱部16b上面16cの中心部にレーザが照射されるように保持金具57によって保持されている。
ここで本実施形態に係るはんだ溶融装置10の動作について簡単に説明する。このはんだ溶融装置10では、通常、操作部36は、レバー部36bが立ち上がった姿勢となっている。このとき、カム41は第2姿勢となっていて、カム41の側面41dがカバー部材53を介して伝達部材43の可動部43bを押圧している。したがって、各押え棒35aの押え部35cは退避位置となっている。
この状態で、取り外したい電子部品がはんだ付けされている基板Pをセットする。すなわち、当該基板Pにおいて、取り外したい電子部品が配置された部分が加熱部16b(加熱体16)の上に位置するように基板Pを加熱体16に載置する。このとき、電子部品が配置されている側の面が上面となるように基板Pを配置する。そして、ポインタ22によってレーザが照射された部分が加熱部16b上面16cの中央部になるため、その指し示されたところに当該電子部品が位置するように基板Pの位置合わせを行う。また、補助支持部20を適宜の位置に配置する。
続いて、操作部36を操作して押え部35cを退避位置から押え位置に移動させる。すなわち、操作部36のレバー部36bを前に向かって倒すと、カム41は操作部36の軸部36aと一体的に回動し、第1姿勢となる。このため、伝達部材43の可動部43bがカバー部材53を介して押され、可動部43bは保持部42とともに前側に少し傾倒する。これにより、押え部35cが退避位置から押え位置に移動して基板Pを上から押さえ付ける。これにより、基板Pは、補助支持部20によって補助的に支えられつつ、加熱体16の加熱部16bに押し付けられて密着する。このとき、各押え棒35aを基側部35bを軸として回動して、押え部35cを適宜の位置に調整する。
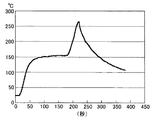
加熱体16は、予め記憶されている温度プロファイルに従って基板Pを加熱する。例えば、150〜180℃に基板P温度を維持する予備加熱を行った後、220〜260℃程度で本加熱を行う。図19は、推奨されている温度プロファイルになるように設定して基板P上面温度を測定した結果の一例である。押え部35cで基板Pを上から押さえ付けて本加熱した後、操作部36を操作し、押え部35cを退避側に移動させた。図19に示されるように、本加熱終了後、加熱体16の上面16cへの基板Pの押さえ付けを解除するため、基板Pの上面温度を速やかに下げることが可能である。押え機構18による押え付けを解除しない場合には、温度プロファイルに示された冷却ラインより時間のかかるものになる。押え機構18による押さえ付けを解除することにより、本加熱後の熱を速やかに下げ、部品への熱影響を少なくすることができる。
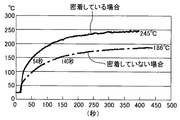
なお、図20に示すように、基板Pを加熱体16に密着させる場合と、密着させない場合とで、安定状態に達するまでの時間に差が生じること、安定状態での温度に差が生じることを確認できている。密着していない場合での安定状態に達した基板P温度が例えば186℃であるのに対し、押え部35cによって基板Pを押さえ付け、基板Pと加熱体16の上面16cとを密着させた場合には、例えば245℃まで上昇する。また、立ち上がりから150℃に達する時間は、密着していない場合が140秒であるのに対し、密着した場合は54秒となっており、基板Pを加熱体16に密着させることより、より短時間で加熱できることが確認できている。この温度は押え部35cと加熱体16との間の位置での基板表面の測定結果である。この結果より、押え部35cにより基板Pを加熱体16の上面に密着するように上から押さえ付けた場合は効率的な加熱が可能であり、加熱によるはんだ溶融後、押え部35cによる押さえ付けを緩めることによって押さえ付けの密着を緩め、基板P上の部品の温度を速やかに下げることができることがわかる。
所定の温度プロファイルに従って基板Pが加熱されると、加熱部16bのすぐ上に位置するはんだが溶融して電子部品を取り外すことができる。なお、電子部品が実装されていない部分にクリームはんだを塗布し電子部品を装着した上で加熱しはんだ付けを行うこともできる。
以上説明したように、本実施形態では、加熱体16の上面16cに基板Pが載置されると、この基板Pは基台12の上面に対して浮いた状態となり、基板Pと基台12の上面との間には間隙ができる。このとき、加熱体16の上面16cは、載置される基板Pの大きさに比べると小さくなっているため、加熱体16の上面16cは一部のはんだが位置する所定部位の基板の下側を支え、基板Pは加熱体16によって局所的に支えられて加熱されることになる。この時、一部のはんだが位置する基板Pの下側の中心点と加熱体16の上面16cの中心点を一致させた点で加熱し、支えることができる。すなわち、溶融したいはんだの真下の位置に加熱体16の上面16cをもってくることができる。したがって、基板P上の一部のはんだのみを溶融させることができる。このため、基板Pに実装された電子部品のうち一部の電子部品を取り外すような場合でも、このはんだ溶融装置10を使用することができる。したがって、取り外さない部品への熱影響も避けることができる。
しかも本実施形態では、加熱体16の上面16c位置から側方に位置ずれしたところを押え部35cによって上から押さえ付け、この状態で基板Pを加熱する。すなわち、加熱体16の上面16c位置から側方に位置ずれしたところを上から押さえるが、このとき基板Pが傾くことなく加熱体16の上面16cに密着するように基板Pを押さえる。したがって、加熱体16の熱を効果的に基板Pの所望部位に伝えることができる。
また本実施形態では、押え部35cを押え位置に位置させて加熱体16によって基板Pを加熱することにより、基板P上において加熱体16の上方に位置するはんだを溶融させることができる。一方、押え部35cを退避位置に移動させることにより、基板Pを加熱体16上にセットするとき、又は基板Pを加熱体16から取り外すときに押え部35cが邪魔にならないようにすることができる。
さらに本実施形態では、操作部36が操作されることにより、押え部35cが移動する。すなわち、操作部36を操作すると、退避位置にあった押え部35cを押え位置まで移動させることができ、また操作部36を操作すると、押え位置にあった押え部35cを退避位置まで移動させることができる。このため、基板Pを加熱部16b上にセットする作業、および基板Pを取り外す作業を楽に行うことができる。
また本実施形態では、押え部35cが基板Pを加熱体16に押さえ付ける際に弾性的に変形し、この弾性力によって基板Pを押圧する。このため、異なる厚みの基板Pに対しても基板Pを押さえ付けることができる。
また本実施形態では、基板Pが加熱体16上に載置されたとき、基台12の上面から浮いている部分を補助支持部20によって下から支持するため、基板Pの全体をより安定した状態に保持することができる。また、加熱体16の上面16cの面積が小さい場合でも、基板Pを安定させることができるので、より小さな面積で基板Pを加熱することが可能となる。このため、ごく小さな面積のはんだを溶融する場合にもこのはんだ溶融装置10を使用することができる。
しかも本実施形態では、補助支持部20が基台12の上面に磁気吸着される構成となっているので、補助支持部20を基台12の上面の所望の位置に配置でき、しかもどの位置においても補助支持部20を磁力で固定することができる。
また本実施形態では、加熱体16が基台12に対して着脱可能となっている。このため、上面16cの大きさの異なる複数の加熱体16を用意することにより、目的に応じた適切な大きさの上面16cを有する加熱体16を基台12に取り付けて使用することができる。すなわち、加熱体16を交換可能にすることができ、より汎用性の高いはんだ溶融装置10とすることができる。
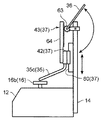
なお、本発明は、前記実施形態に限られるものではなく、その趣旨を逸脱しない範囲で種々変更、改良等が可能である。例えば、前記実施形態では、保持部42が水平軸回りに回動する構成としたが、図7に示すように、保持部42が上下方向に直線的に移動する構成としてもよい。
この構成では、連動機構37は、操作部36の操作に応じて回動するカム41と、上下方向に延びるレール部材60と、押え部材35を保持し且つレール部材60に沿ってスライド可能な保持部42と、を備え、カム41が回動することによって保持部42がレール部材60に沿って移動する。具体的には、支柱14には、その長さ方向に延びるレール部材60が固定されており、保持部42は、レール部材60に係合した状態を維持しながら上下方向にスライド可能となっている。
カム41は、支柱14に回動可能に設けられており、操作部36の操作に伴って水平軸回りに回動する。カム41は、保持部42の上端面に当接可能となっている。操作部36を上向きに操作すると、カム41が保持部42を下方に押圧し、これにより、保持部42が下方に移動し、押え部35cが退避位置から押え位置に移動する。
保持部42には、当該保持部を上向きに付勢する付勢部材61が設けられている。したがって、操作部36から手を離すと押え部35cは上昇して、退避位置に戻る。
なお、カム41の先端部近傍に平坦面を形成しておき、この平坦面が保持部42の上端面に面接触することにより、保持部42が下位置で保持される構成としてもよい。この場合には、操作部36を下向きに回動することにより、保持部42を付勢部材61のばね力によって上昇させる構成となる。この態様では、押え部35cが押え位置にあるときに基板Pを押さえ付けた状態を確実に維持することができる。この結果、加熱体16で基板Pを加熱するときに、加熱体16の上面16cが基板Pに密着した状態を確実に維持することができる。また、押え部35cの重量を軽くしたとしても、押え部35cで確実に基板Pを押さえ付けることができる。このため、押え部35cが手動で移動する構成の場合には、押え部35cを軽量化することにより操作性のよい押え機構18にすることができる。
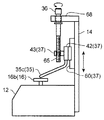
図7では、連動機構37がカム41を有する構成としているが、これに限られるものではない。例えば、図8に示すように、連動機構37は、操作部36の操作に応じて上下動する伝達部材43と、上下方向に延びるレール部材60と、押え部材35を保持し且つレール部材60に沿ってスライド可能な保持部42と、を備え、伝達部材43が上下方向に移動することによって保持部42がレール部材60に沿って移動する。すなわち、操作部36にはピニオン63が固定されており、伝達部材43は、このピニオン63に噛み合い且つ保持部42に結合されたラック64を有している。そして、操作部36を水平軸回りに回動すると、ラック64が上下方向に移動する。これにより、押え部35cを退避位置と押え位置との間で移動させることができる。
また、図9に示すように、操作部36を垂直軸回りに回動可能な構成としてもよい。この構成では、操作部36は、支柱14から側方に延出した延出部68に垂直軸回りに回動可能に保持されている。この操作部36には雄ねじ部65が設けられており、伝達部材43は、この雄ねじ部65に螺合する雌ねじ部を有している。そして、操作部36を軸回りに回動する操作を行うことにより、保持部42が上下方向に移動する。これにより、押え部35cを退避位置と押え位置との間で移動させることができる。この構成では、保持部42を任意の位置で固定できるので、基板Pを押さえ付けた状態を確実に維持することができる。この結果、加熱体16で基板Pを加熱するときに、加熱体16の上面16cが基板Pに密着した状態を確実に維持することができる。また、押え部35cの重量を軽くしたとしても、押え部35cで確実に基板Pを押さえ付けることができる。
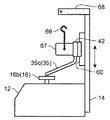
前記実施形態では、操作部36及び連動機構37が設けられた構成について説明したが、これに限られるものではない。例えば、図10に示すように、保持部42を操作部36に連動して移動させるのではなく、保持部42自体を移動させる構成としてもよい。すなわち、支柱14には上下方向に延びるレール部材60が設けられており、保持部42は、押え部材35を保持し且つレール部材60に沿ってスライド可能となっている。保持部42には、錘67が固定されるとともに、錘67には、支柱14から延出された延出部68に引っ掛けるためのフック69が固定されている。フック69が延出部68に引っ掛けられると、押え部35cは退避位置に維持される。一方、フック69を外すと、押え部35cは退避位置から押え位置まで降下する。この構成では、ストロークに限らず、一体荷重で基板Pを押圧することができる。
また、図11に示すように、錘67に代えてばね部材71の弾性力を利用してもよい。この構成は、保持部42と支柱14から延出された支持部72との間に配置されたばね部材71が設けられる。このばね部材71は保持部42を下向きに付勢している。ばね部材71が図11に示すように保持部42の上側に配置される場合には、ばね部材71は圧縮ばねとなり、保持部42の下側で基台12との間に配置される場合には、ばね部材71は引張ばねとなる。なお、ばね部材71に代えてシリンダ(図示省略)を備える構成としてもよい。
図8〜図11に示す構成のように、押え部材35がレール部材60に沿って上下方向に移動する構成に代え、図12〜図15に示すように、押え部材35が支柱14に回動可能に支持される構成としてもよい。
図12に示す構成では、押え部材35の上端部が支柱14に回動可能に取り付けられている。したがって、押え部材35が上端部を中心として回動することにより、押え部材35の押え部35cは押え位置と退避位置との間で移動する。支柱14の延出部68には、押圧部材としての錘67を引っ掛けることができ、この錘67はばね部材74によって延出部68につり下げられている。したがって、錘67を延出部68から外すと錘67の自重によって押え部35cを下方に押すことができる。
図13に示す構成では、押圧部材76がばね部材71のばね力によって押え部材35を下方に押圧する。図12のばね部材74は錘67をつり下げるために用いられるが、図13に示す構成では、押え部材35の押え部35cを下方に付勢するためにばね部材71が用いられる。ばね部材71が押圧部材76の上端に設けられるときには、ばね部材71として圧縮ばねが用いられ、ばね部材71が押圧部材76の下端に設けられるときには、ばね部材71として引張ばねが用いられる。図13では両ばね部材71が用いられた構成を示しているが、何れか一方のみでよい。なお、ばね部材71に代えて、シリンダ(図示省略)を用いてもよい。
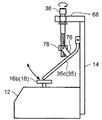
図14に示す構成では、操作部36を垂直軸回りに回転させるとナット部材78が上下動し、押圧部材76によって押え部材35を押圧する構成である。ナット部材78は図略の案内手段によって上下方向に案内される。
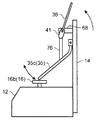
図15に示す構成では、操作部36に固定されたカム41を回動させることによって、押圧部材76を介して押え部材35を押圧する構成である。この押圧部材76も図略の案内手段によって上下方向に案内される。
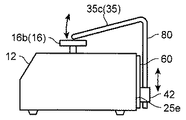
図8〜図11の構成は、押え部材35が支柱14に設けられたレール部材60に沿って上下方向に移動する構成としたが、これに限られるものではない。例えば、図16に示すように、レール部材60を基台12の背面部25eに固定し、押え部材35が上方に延びる延出部80を備え、押え部35cがこの延出部80の上端部に繋がる構成としてもよい。
また、図17に示すように、押え部材35が上下方向に延びる延出部80の下端部において、基台12の背面部25eに回動可能に支持される構成としてもよい。
前記実施形態では、補助支持部20が基台12の上面の任意の位置に配置されるとともに、基台12から取り外す構成としたが、これに限られるものではない。例えば、図18に示すように、基台12の上面16cにはレール82が設けられていて、補助支持部20はこのレール82に案内される構成としてもよい。この構成において、補助支持部20をレール82から取り外せない構成としてもよい。レール82はその一端部において基台12の上面25aに回動可能に取り付けられている。したがって、補助支持部20の配置の自由度が阻害されることを防止できる。