JP2012166162A - 撹拌装置及び撹拌装置制御方法 - Google Patents
撹拌装置及び撹拌装置制御方法 Download PDFInfo
- Publication number
- JP2012166162A JP2012166162A JP2011030419A JP2011030419A JP2012166162A JP 2012166162 A JP2012166162 A JP 2012166162A JP 2011030419 A JP2011030419 A JP 2011030419A JP 2011030419 A JP2011030419 A JP 2011030419A JP 2012166162 A JP2012166162 A JP 2012166162A
- Authority
- JP
- Japan
- Prior art keywords
- stirrer
- magnetic field
- detection position
- approach detection
- rotating magnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Automatic Analysis And Handling Materials Therefor (AREA)
- Mixers With Rotating Receptacles And Mixers With Vibration Mechanisms (AREA)
- Mixers Of The Rotary Stirring Type (AREA)
Abstract
【解決手段】第1方向に回転する第1方向回転磁界を発生させて撹拌子を第1方向に回転させ、第1方向に回転する撹拌子内部の磁石の磁界を検知部で検知した第1方向接近検知位置から、第1方向と反対の第2方向に回転する第2方向回転磁界を発生させて撹拌子を第2方向に回転させ、第2方向に回転する撹拌子内部の磁石について第1方向接近検知位置と同一の磁極の磁界を検知部で検知した第2方向接近検知位置に関して、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転角度から補正角度を算出し、第1方向接近検知位置から補正角度分を第1方向、もしくは、第2方向接近検知位置から補正角度分を第2方向に撹拌子を回転させる回転磁界を回転磁界発生部に発生させて、撹拌子を所定方向で停止するよう回転させる。
【選択図】図1
Description
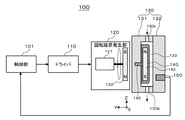
まず図1−図3を参照して第1実施形態の撹拌装置の構成を説明する。
以上の第1実施形態に示したように各動作毎に以上の制御を行うことが望ましいが、補正角度を求めてから所定時間が経過する前であれば、既に求めた補正角度を使用することも可能である。
なお、以上の実施形態では鉛直方向に撹拌子140を停止させるように制御していたが、本実施形態を適用することで撹拌子140を異なる停止位置となるように制御することも可能である。
101 制御部
110 ドライバ
120 回転磁界発生部
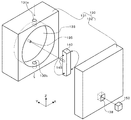
130 容器(反応容器)
131 バックパネル
132 フロントパネル
133 空間
140 撹拌子
142 磁石
145 軸
150 ホール素子
Claims (5)
- 内部に導入された液体が撹拌される容器と、
前記容器内で鉛直方向を含む平面内で回動自在に設けられる撹拌子と、
前記撹拌子の内部に配置される磁石と、
前記撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、
前記撹拌子が所定方向になる位置において前記磁石の磁界を検知する検知部と、
前記回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、
を備え、
前記制御部は、
第1方向に回転する第1方向回転磁界を発生させて前記撹拌子を第1方向に回転させ、
前記第1方向に回転する前記撹拌子内部の前記磁石の磁界を前記検知部で検知した第1方向接近検知位置から、前記第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて前記撹拌子を第2方向に回転させ、
前記第2方向に回転する前記撹拌子内部の前記磁石について前記第1方向接近検知位置と同一の磁極の磁界を前記検知部で検知した第2方向接近検知位置に関して、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度を参照して補正角度を算出し、
前記第2方向接近検知位置から前記補正角度分を前記第2方向に前記撹拌子を回転させる回転磁界を前記回転磁界発生部に発生させることにより、前記撹拌子を前記所定方向で停止するように回転させる、
ことを特徴とする撹拌装置。 - 前記制御部は、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度をA°、前記補正角度をB°とした場合、B=(360−A)/2、として前記補正角度を算出する、
ことを特徴とする請求項1に記載の撹拌装置。 - 前記回転磁界発生部は、前記制御部からの駆動パルスに応じて回転する磁界を発生するものであり、
前記制御部は、前記補正角度および前記回転角度を前記駆動パルスのカウントにより行い、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転時のカウント値をa、前記補正角度B°に対応するパルス数をb、前記撹拌子の1回転360°分のカウント値をxとした場合
b=(x−a)/2、
として前記補正角度を算出する、
ことを特徴とする請求項1に記載の撹拌装置。 - 前記所定方向は、前記撹拌子の長手方向が鉛直方向に一致する方向である、
ことを特徴とする請求項1−3のいずれか一項に記載の撹拌装置。 - 内部に導入された液体が撹拌される容器と、前記容器内で鉛直方向を含む平面内で回動自在に設けられる撹拌子と、前記撹拌子の内部に配置される磁石と、前記撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、前記撹拌子が鉛直方向になる位置において前記磁石の磁界を検知する検知部と、前記回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、を備えた撹拌装置を制御する撹拌装置制御方法であって、
第1方向に回転する第1方向回転磁界を発生させて前記撹拌子を第1方向に回転させ、
前記第1方向に回転する前記撹拌子内部の前記磁石の磁界を前記検知部で検知した第1方向接近検知位置から、前記第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて前記撹拌子を第2方向に回転させ、
前記第2方向に回転する前記撹拌子内部の前記磁石について前記第1方向接近検知位置と同一の磁極の磁界を前記検知部で検知した第2方向接近検知位置に関して、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度を参照して補正角度を算出し、
前記第2方向接近検知位置から前記補正角度分を前記第2方向に前記撹拌子を回転させる回転磁界を前記回転磁界発生部に発生させることにより、前記撹拌子を前記所定方向で停止するように回転させる、
ことを特徴とする撹拌装置制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011030419A JP5657416B2 (ja) | 2011-02-16 | 2011-02-16 | 撹拌装置及び撹拌装置制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011030419A JP5657416B2 (ja) | 2011-02-16 | 2011-02-16 | 撹拌装置及び撹拌装置制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012166162A true JP2012166162A (ja) | 2012-09-06 |
| JP5657416B2 JP5657416B2 (ja) | 2015-01-21 |
Family
ID=46970862
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011030419A Active JP5657416B2 (ja) | 2011-02-16 | 2011-02-16 | 撹拌装置及び撹拌装置制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5657416B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110585945A (zh) * | 2019-10-10 | 2019-12-20 | 安徽信息工程学院 | 一种综合搅拌容器 |
| EP4443183A1 (de) * | 2023-03-23 | 2024-10-09 | 2mag AG | Rührvorrichtung für einen magnetrührer |
| WO2025242740A1 (de) * | 2024-05-22 | 2025-11-27 | 2Mag Ag | Verfahren und vorrichtung für die überwachung eines magnetrührers |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4227815A (en) * | 1979-07-06 | 1980-10-14 | Beckman Instruments, Inc. | Magnetic stirrer for sample container of photometric analyzer |
| JPS62184508A (ja) * | 1986-02-10 | 1987-08-12 | Pioneer Electronic Corp | 原点復帰方法 |
-
2011
- 2011-02-16 JP JP2011030419A patent/JP5657416B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4227815A (en) * | 1979-07-06 | 1980-10-14 | Beckman Instruments, Inc. | Magnetic stirrer for sample container of photometric analyzer |
| JPS62184508A (ja) * | 1986-02-10 | 1987-08-12 | Pioneer Electronic Corp | 原点復帰方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110585945A (zh) * | 2019-10-10 | 2019-12-20 | 安徽信息工程学院 | 一种综合搅拌容器 |
| EP4443183A1 (de) * | 2023-03-23 | 2024-10-09 | 2mag AG | Rührvorrichtung für einen magnetrührer |
| WO2025242740A1 (de) * | 2024-05-22 | 2025-11-27 | 2Mag Ag | Verfahren und vorrichtung für die überwachung eines magnetrührers |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5657416B2 (ja) | 2015-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5657416B2 (ja) | 撹拌装置及び撹拌装置制御方法 | |
| US12174209B2 (en) | Blood sample analyzer with sample agitating structure and blood sample agitating method | |
| JP5203979B2 (ja) | 自動分析装置 | |
| Yang et al. | An automated microrobotic platform for rapid detection of C. diff toxins | |
| EP2233928B1 (en) | Analyzing apparatus | |
| JP5400021B2 (ja) | 自動分析装置 | |
| CN105466750B (zh) | 分析装置及搅拌单元 | |
| JP2012159315A (ja) | 分析装置 | |
| US8545757B2 (en) | Automatic analyzer and sample treatment apparatus | |
| JP2019197035A (ja) | 撹拌装置、分析装置、分注方法 | |
| WO2016002731A1 (ja) | 試料分析用基板および試料分析装置 | |
| CN110036561A (zh) | 传感器误差检测与校正 | |
| CN114127549A (zh) | 分析装置以及分析方法 | |
| JP2000254472A (ja) | 攪拌装置と攪拌方法 | |
| JP2009025167A (ja) | 自動分析装置 | |
| US20090223824A1 (en) | Stirring device, microbe testing device, and microbe testing method | |
| CN107206383A (zh) | 移液器清洁方法和设备、中和液体容器、以及减少残留的方法 | |
| JP6528624B2 (ja) | 撹拌システム、チップ、及び、撹拌装置 | |
| EP4328591A1 (en) | Automatic analysis device and analysis method | |
| JP2010133742A (ja) | 電解質分析方法および電解質分析装置 | |
| JP2017083346A (ja) | 液体試料分析装置 | |
| JP2023007178A (ja) | 自動分析装置 | |
| JP2014002137A (ja) | 自動分析装置、蓋体及び試薬容器 | |
| JP2012189405A (ja) | 電解質測定方法及び電解質測定装置 | |
| JP2006153785A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131018 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140701 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140901 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141111 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5657416 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |