JP2012150087A - ナビゲーション装置およびランダバウトでのコスト計算方法 - Google Patents
ナビゲーション装置およびランダバウトでのコスト計算方法 Download PDFInfo
- Publication number
- JP2012150087A JP2012150087A JP2011010910A JP2011010910A JP2012150087A JP 2012150087 A JP2012150087 A JP 2012150087A JP 2011010910 A JP2011010910 A JP 2011010910A JP 2011010910 A JP2011010910 A JP 2011010910A JP 2012150087 A JP2012150087 A JP 2012150087A
- Authority
- JP
- Japan
- Prior art keywords
- link
- road
- route
- links
- cost
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
Abstract
【解決手段】経路探索部3が誘導経路の探索を行う際に、少なくとも一方のリンクがランダバウトの構成道路となっているリンク間では右左折コストを加算しないようにすることにより、ランダバウトのリンクにおいて無駄に右左折コストが加算されてしまうことがなくなるようにして、本当はランダバウトを通過した方が目的地に早く到達できるのに、ランダバウトを避ける遠回りルートが探索されることを抑制できるようにする。
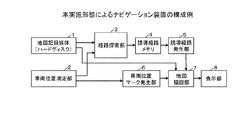
【選択図】図1
Description
3 経路探索部
Claims (2)
- リンクがランダバウトの構成道路に対応するものか否かを表す道路属性情報を含んだ道路データを記憶する道路データ記憶部と、
上記道路データ記憶部に記憶された道路データに基づいて誘導経路の探索を行う経路探索部とを備え、
上記経路探索部は、少なくとも一方のリンクが上記道路属性情報により上記ランダバウトであることが示されているリンク間では右左折コストを加算せずに上記誘導経路の探索を行うことを特徴とするナビゲーション装置。 - リンクがランダバウトの構成道路に対応するものか否かを表す道路属性情報を含んだ道路データに基づいてナビゲーション装置が誘導経路の探索を行う際におけるコスト計算方法であって、
上記ナビゲーション装置が、上記誘導経路の探索枝となる2つのリンクの接続関係が右折または左折の何れかの関係に該当するか否かを判定する右左折判定ステップと、
上記ナビゲーション装置が、上記右折または左折の関係に該当すると判定された場合に、上記2つのリンクの少なくとも一方が、上記道路属性情報により上記ランダバウトであることが示されているリンクであるか否かを判定するランダバウト判定ステップと、
上記右折または左折の関係に該当すると判定され、かつ、上記2つのリンクが何れも上記ランダバウトのリンクでないと判定された場合に限り、所定の右左折コストを加算するコスト加算ステップとを有することを特徴とするランダバウトでのコスト計算方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011010910A JP5595293B2 (ja) | 2011-01-21 | 2011-01-21 | ナビゲーション装置およびランダバウトでのコスト計算方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011010910A JP5595293B2 (ja) | 2011-01-21 | 2011-01-21 | ナビゲーション装置およびランダバウトでのコスト計算方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012150087A true JP2012150087A (ja) | 2012-08-09 |
| JP5595293B2 JP5595293B2 (ja) | 2014-09-24 |
Family
ID=46792450
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011010910A Active JP5595293B2 (ja) | 2011-01-21 | 2011-01-21 | ナビゲーション装置およびランダバウトでのコスト計算方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5595293B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016180667A (ja) * | 2015-03-24 | 2016-10-13 | パイオニア株式会社 | ナビゲーション装置 |
| JP2019194626A (ja) * | 2019-08-01 | 2019-11-07 | パイオニア株式会社 | ナビゲーション装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004138421A (ja) * | 2002-10-16 | 2004-05-13 | Alpine Electronics Inc | 車載用ナビゲーション装置 |
| JP2008101919A (ja) * | 2006-10-17 | 2008-05-01 | Alpine Electronics Inc | 地図データ作成方法、誘導経路の探索方法及び車載用ナビゲーション装置 |
| JP2009041927A (ja) * | 2007-08-06 | 2009-02-26 | Alpine Electronics Inc | ナビゲーション装置 |
-
2011
- 2011-01-21 JP JP2011010910A patent/JP5595293B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004138421A (ja) * | 2002-10-16 | 2004-05-13 | Alpine Electronics Inc | 車載用ナビゲーション装置 |
| JP2008101919A (ja) * | 2006-10-17 | 2008-05-01 | Alpine Electronics Inc | 地図データ作成方法、誘導経路の探索方法及び車載用ナビゲーション装置 |
| JP2009041927A (ja) * | 2007-08-06 | 2009-02-26 | Alpine Electronics Inc | ナビゲーション装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016180667A (ja) * | 2015-03-24 | 2016-10-13 | パイオニア株式会社 | ナビゲーション装置 |
| JP2019194626A (ja) * | 2019-08-01 | 2019-11-07 | パイオニア株式会社 | ナビゲーション装置 |
| JP2021165751A (ja) * | 2019-08-01 | 2021-10-14 | パイオニア株式会社 | ナビゲーション装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5595293B2 (ja) | 2014-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10012516B1 (en) | Navigation lane guidance | |
| JP3967061B2 (ja) | ナビゲーション装置 | |
| US7702456B2 (en) | System and method for presenting a computed route | |
| CN102037324B (zh) | 用于提供到兴趣点的路线的方法及系统 | |
| JP2006105993A (ja) | 車両ナビゲーション表示方法およびシステム | |
| US20120191344A1 (en) | Method and apparatus for displaying lane complexity information for navigation system | |
| JP2007132735A (ja) | カーナビゲーション装置 | |
| JP2006258656A (ja) | 車両用ナビゲーション装置 | |
| JP2006267079A (ja) | ナビゲーション装置 | |
| JP4651511B2 (ja) | ナビゲーション装置および車両位置確定方法 | |
| JP2007272276A (ja) | 駐車支援システム | |
| JP2013096713A (ja) | ナビゲーション装置 | |
| JP2011027610A (ja) | ナビゲーション装置および誘導経路探索方法 | |
| JP2008139174A (ja) | 経路探索装置 | |
| JP2008002819A (ja) | 車両用ナビゲーション装置及び車両用ナビゲーション方法 | |
| JP4707516B2 (ja) | ナビゲーション装置および経路案内方法 | |
| JP2004093240A (ja) | ナビゲーション装置 | |
| JP2010032243A (ja) | ナビゲーション装置 | |
| JP4372526B2 (ja) | ナビゲーション装置および周辺施設の案内方法 | |
| JP5595293B2 (ja) | ナビゲーション装置およびランダバウトでのコスト計算方法 | |
| US20100030468A1 (en) | Method of generating navigation message and system thereof | |
| JP2009097916A (ja) | ナビゲーション装置 | |
| JP2013167452A (ja) | ナビゲーションシステム | |
| JP2016109493A (ja) | ナビゲーション装置、及びナビゲーションプログラム | |
| JP2006250662A (ja) | ナビゲーション装置および誘導経路の探索方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140415 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140416 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140526 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140805 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140805 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5595293 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |