JP2012144342A - トング式吊具 - Google Patents
トング式吊具 Download PDFInfo
- Publication number
- JP2012144342A JP2012144342A JP2011004447A JP2011004447A JP2012144342A JP 2012144342 A JP2012144342 A JP 2012144342A JP 2011004447 A JP2011004447 A JP 2011004447A JP 2011004447 A JP2011004447 A JP 2011004447A JP 2012144342 A JP2012144342 A JP 2012144342A
- Authority
- JP
- Japan
- Prior art keywords
- tong
- workpiece
- tongue
- arm
- lifting device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 26
- 239000000725 suspension Substances 0.000 abstract description 13
- 230000008901 benefit Effects 0.000 abstract description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images





Landscapes
- Manipulator (AREA)
- Load-Engaging Elements For Cranes (AREA)
Abstract
ワークの自重を利用したリンク機構の回転動作でワークを挟込んで吊持するトング式吊具について、装置構成が小型,簡素であるという利点が損なわれず、ワークの吊持作業の安全性が確保されるようにする。
【解決手段】
ワークWの自重を利用したリンク機構の回転動作でワークWを挟込んで吊持するものである。相対してワークWを挟込む挟込支持部13がリンク機構を構成するトングアーム2の下部にそれぞれ回転可能に取付けられている。一方のトングアーム2には、一方の挟込支持部13を回転駆動する回転駆動部16が取付けられている。回転駆動部16は、手動の操作ハンドル16aで回転操作されるウオームギア16b,ウオームホイール16cのギア噛合構造からなる。
【選択図】図1
Description
2 トングアーム(下部リンクアーム)
3,4,5 連結軸
13 挟込支持部
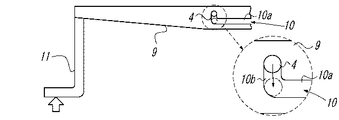
13c 球面体(球面軸受)
14 可動取付部
14e 球面座(球面軸受)
15 間隔調整機構
16 回転駆動部
16a 操作ハンドル
16b ウオームギア
16c ウオームホイール
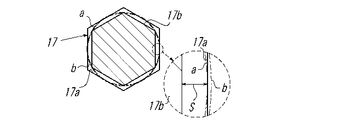
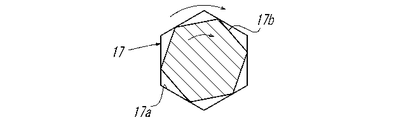
17 自在継手
18 バランサ
Claims (5)
- ワークの自重を利用したリンク機構の回転動作でワークを挟込んで吊持するものであって、相対してワークを挟込む挟込支持部がリンク機構を構成するトングアームの下部にそれぞれ回転可能に取付けられ、一方のトングアームに一方の挟込支持部を回転駆動する回転駆動部が取付けられたトング式吊具において、回転駆動部は手動の操作ハンドルで回転操作されるウオームギア,ウオームホイールのギア噛合構造からなることを特徴とするトング式吊具。
- 請求項1のトング式吊具において、挟込支持部は球面軸受を介してトングアームに変位可能に支持されていることを特徴とするトング式吊具。
- 請求項2のトング式吊具において、一方の挟込支持部と回転駆動部とは自在継手を介して非固定的に連結されていることを特徴とするトング式吊具。
- 請求項1〜3のいずれかのトング式吊具において、他方のトングアームは下部にバランサが取付けられていることを特徴とするトング式吊具。
- 請求項1〜4のいずれかのトング式吊具において、両方のトングアームは相対する挟込支持部の間隔を調整可能な間隔調整機構が設けられていることを特徴とするトング式吊具。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011004447A JP5677656B2 (ja) | 2011-01-13 | 2011-01-13 | トング式吊具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011004447A JP5677656B2 (ja) | 2011-01-13 | 2011-01-13 | トング式吊具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012144342A true JP2012144342A (ja) | 2012-08-02 |
| JP5677656B2 JP5677656B2 (ja) | 2015-02-25 |
Family
ID=46788342
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011004447A Expired - Fee Related JP5677656B2 (ja) | 2011-01-13 | 2011-01-13 | トング式吊具 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5677656B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103086263A (zh) * | 2013-02-21 | 2013-05-08 | 安徽合力股份有限公司 | 用于叉车变速箱吊装翻身的吊具 |
| JP2014097565A (ja) * | 2012-11-14 | 2014-05-29 | Hyundai Motor Company Co Ltd | 車両組立てロボットのグリッパー |
| CN105480849A (zh) * | 2014-09-26 | 2016-04-13 | 东风德纳车桥有限公司 | 车桥减速器可回转从动锥齿轮吊具 |
| JP2017226030A (ja) * | 2016-06-21 | 2017-12-28 | 住友重機械工業株式会社 | 作業装置、作業装置システム |
| CN109940647A (zh) * | 2019-04-16 | 2019-06-28 | 芜湖新兴铸管有限责任公司 | 铸管生产过程中使用的堵头夹持机械手 |
| CN113878610A (zh) * | 2021-10-27 | 2022-01-04 | 潍坊新松机器人自动化有限公司 | 一种用于智能机器人的工件夹持工具 |
| CN115385226A (zh) * | 2022-08-25 | 2022-11-25 | 共享智能铸造产业创新中心有限公司 | 砂芯转运夹具 |
| CN115569873A (zh) * | 2022-04-14 | 2023-01-06 | 张雪林 | 一种物流分拣系统及物流分拣方法 |
| CN118952287A (zh) * | 2024-08-28 | 2024-11-15 | 西安数驱智信息科技有限公司 | 一种多自由度工业机械臂 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108942987B (zh) * | 2018-08-24 | 2022-01-25 | 深圳蓝胖子机器人有限公司 | 末端执行器、机器人及翻转物品的方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4819732Y1 (ja) * | 1969-11-04 | 1973-06-06 | ||
| JPS5251655A (en) * | 1975-10-21 | 1977-04-25 | Jiro Sakurai | Conveying device for gripping article in rotatable and axially movable manner responsive to shape of article |
| JPS57123382U (ja) * | 1981-01-26 | 1982-07-31 | ||
| JPS5853775U (ja) * | 1981-10-03 | 1983-04-12 | 協同組合 皆栄コンクリ−ト | 中空体構造物回転吊り具 |
| JPH08133662A (ja) * | 1994-11-02 | 1996-05-28 | Kiyouhou Seisakusho:Kk | パレット持上げ装置 |
| JPH09183586A (ja) * | 1995-12-28 | 1997-07-15 | Nippon Steel Corp | 吊荷の玉掛け方法および装置 |
| JPH09194182A (ja) * | 1996-01-16 | 1997-07-29 | Katsunori Tanada | 把持装置 |
| JP2006290612A (ja) * | 2005-04-05 | 2006-10-26 | Kazuya Horie | ワンタッチクランプ |
-
2011
- 2011-01-13 JP JP2011004447A patent/JP5677656B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4819732Y1 (ja) * | 1969-11-04 | 1973-06-06 | ||
| JPS5251655A (en) * | 1975-10-21 | 1977-04-25 | Jiro Sakurai | Conveying device for gripping article in rotatable and axially movable manner responsive to shape of article |
| JPS57123382U (ja) * | 1981-01-26 | 1982-07-31 | ||
| JPS5853775U (ja) * | 1981-10-03 | 1983-04-12 | 協同組合 皆栄コンクリ−ト | 中空体構造物回転吊り具 |
| JPH08133662A (ja) * | 1994-11-02 | 1996-05-28 | Kiyouhou Seisakusho:Kk | パレット持上げ装置 |
| JPH09183586A (ja) * | 1995-12-28 | 1997-07-15 | Nippon Steel Corp | 吊荷の玉掛け方法および装置 |
| JPH09194182A (ja) * | 1996-01-16 | 1997-07-29 | Katsunori Tanada | 把持装置 |
| JP2006290612A (ja) * | 2005-04-05 | 2006-10-26 | Kazuya Horie | ワンタッチクランプ |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014097565A (ja) * | 2012-11-14 | 2014-05-29 | Hyundai Motor Company Co Ltd | 車両組立てロボットのグリッパー |
| CN103086263A (zh) * | 2013-02-21 | 2013-05-08 | 安徽合力股份有限公司 | 用于叉车变速箱吊装翻身的吊具 |
| CN105480849A (zh) * | 2014-09-26 | 2016-04-13 | 东风德纳车桥有限公司 | 车桥减速器可回转从动锥齿轮吊具 |
| JP2017226030A (ja) * | 2016-06-21 | 2017-12-28 | 住友重機械工業株式会社 | 作業装置、作業装置システム |
| CN109940647A (zh) * | 2019-04-16 | 2019-06-28 | 芜湖新兴铸管有限责任公司 | 铸管生产过程中使用的堵头夹持机械手 |
| CN113878610A (zh) * | 2021-10-27 | 2022-01-04 | 潍坊新松机器人自动化有限公司 | 一种用于智能机器人的工件夹持工具 |
| CN115569873A (zh) * | 2022-04-14 | 2023-01-06 | 张雪林 | 一种物流分拣系统及物流分拣方法 |
| CN115385226A (zh) * | 2022-08-25 | 2022-11-25 | 共享智能铸造产业创新中心有限公司 | 砂芯转运夹具 |
| CN118952287A (zh) * | 2024-08-28 | 2024-11-15 | 西安数驱智信息科技有限公司 | 一种多自由度工业机械臂 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5677656B2 (ja) | 2015-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5677656B2 (ja) | トング式吊具 | |
| JP5430947B2 (ja) | 位置決め装置 | |
| JP5258074B2 (ja) | ワンタッチ式面取り量の調節が可能な溶接ビード面加工用面取り機 | |
| JP4823097B2 (ja) | 工作機械のアタッチメント | |
| CN108290276B (zh) | 可调整快速虎钳 | |
| US20120184188A1 (en) | Disc sander | |
| JP6777665B2 (ja) | ロボットハンド、ロボットおよびロボットハンドのハンド幅調整方法 | |
| JP2012504503A (ja) | フランジ面自動加工装置 | |
| WO2018072189A1 (zh) | 一种安全性高的轴类零件抛光机构及其使用方法 | |
| TW201503990A (zh) | 具翻轉功能的夾持機構及其翻轉與平移工件的方法 | |
| JP5569334B2 (ja) | ナット締め装置およびナット締め方法 | |
| CN101444904A (zh) | 可调快夹棘轮扳手 | |
| CN111716343B (zh) | 机器人 | |
| CN110562842B (zh) | 一种旋转式移物装置 | |
| JP5889767B2 (ja) | 工具保持装置 | |
| WO2019061225A1 (zh) | 用于切片机的旋转方向改变装置 | |
| CN103240612A (zh) | 一种回转工作台 | |
| CN212241051U (zh) | 机器人 | |
| CN113681206B (zh) | 一种车辆称重平板传感器用点焊装置及使用方法 | |
| CN206383067U (zh) | 连接支撑杆的自适应夹具 | |
| CN103978427A (zh) | 夹具 | |
| JP4669801B2 (ja) | 無慣性タイプの荷重取扱装置 | |
| KR101415974B1 (ko) | 앵글헤드 및 이를 포함하는 가공 장치 | |
| US9015917B2 (en) | Clamping and gripping device with high mechanical advantage and energy saving attributes | |
| JP2008173757A (ja) | 五節リンク型ハプティックデバイス |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121030 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140701 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5677656 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |