JP2012133760A - 交通信号制御装置及び交通信号制御方法 - Google Patents
交通信号制御装置及び交通信号制御方法 Download PDFInfo
- Publication number
- JP2012133760A JP2012133760A JP2011249839A JP2011249839A JP2012133760A JP 2012133760 A JP2012133760 A JP 2012133760A JP 2011249839 A JP2011249839 A JP 2011249839A JP 2011249839 A JP2011249839 A JP 2011249839A JP 2012133760 A JP2012133760 A JP 2012133760A
- Authority
- JP
- Japan
- Prior art keywords
- time difference
- right turn
- difference display
- traffic
- inflow path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Abstract
【課題】有効な時差現示を実現することができる交通信号制御装置及び交通信号制御方法を提供する。
【解決手段】交通情報取得部12は、交差点で対向する流入路の交差点での各右折方向の交通情報を取得する。右折車両判定部13は、交差点での各右折方向の交通情報に基づいて各右折方向の右折待ち車両の多少を判定する。時差現示判定部16は、交通情報取得部12で取得した各右折方向の交通情報に基づいて時差現示を行うか否かを判定する。例えば、交差点で対向する流入路の一方向からの右折車両の台数又は行列長が対向方向からの右折車両の台数又は行列長よりも多い又は長い場合、東方向一方向に対して時差現示を行うと判定する。
【選択図】図1
【解決手段】交通情報取得部12は、交差点で対向する流入路の交差点での各右折方向の交通情報を取得する。右折車両判定部13は、交差点での各右折方向の交通情報に基づいて各右折方向の右折待ち車両の多少を判定する。時差現示判定部16は、交通情報取得部12で取得した各右折方向の交通情報に基づいて時差現示を行うか否かを判定する。例えば、交差点で対向する流入路の一方向からの右折車両の台数又は行列長が対向方向からの右折車両の台数又は行列長よりも多い又は長い場合、東方向一方向に対して時差現示を行うと判定する。
【選択図】図1
Description
本発明は、交差点で対向する流入路に対して時差現示を行うことができる交通信号制御装置及び交通信号制御方法に関する。
交通信号制御の目的は、交差点における交通流を最適化することにより、渋滞改善などの円滑性を向上させ、また交通事故防止などの安全性を向上させることにある。円滑性の観点では、交差点を直進、左折又は右折する車両の交通量に応じて、最適な信号表示パターンが選択され、かつ、適切な青時間を与える必要がある。交通信号制御の方式としては、例えば、通常制御、時差現示制御、ステータス変更制御、ムーブメント制御(可変フェーズ制御又は可変現示制御ともいう)などがある。
通常制御は、例えば、交差点で対向する流入路(交差点に流入する道路)で交通量が同程度である場合、右折交通が少ない交差点の場合、あるいは対向車線の直進交通が少ない交差点などの場合において、一方の流入路の現示に対して「青から黄、黄から全赤」、交差する他方の流入路の現示に対しても同様に「青から黄、黄から全赤」のような単純な信号表示が選択され、交差点で交差する流入路のそれぞれの交通需要に応じた青時間が与えられる。右折車は対向車線の車両が途切れた時間に右折が可能であり、青時間中に右折が不可能であっても、青終了時点での右折待ち台数が1又は2台程度であれば、これらの右折車は「黄から全赤」の間に右折が可能なので、必要以上に交差点で待たされることは無い。
また、時差現示制御は、交差点で対向する流入路に交通量の偏りがある場合、すなわち対向する流入路のいずれかの方向で渋滞又は混雑している交差点の場合に、交通量が多い方向(優先方向ともいう)の信号灯器の灯色を青にするとともに、交通量が少ない方向の信号灯器の灯色をすべて赤にする現示である。
また、ステータス変更制御は、サイクルの開始時点で時差現示の方向を可変とする方法であり、特に、交差点で対向する流入路の交通量が朝夕の時間帯で変化するような場合に、時差現示の方向を時間帯に応じて変えるのに適しているものである。
また、ムーブメント制御は、サイクルの途中で時差現示の方向を可変とする方法であり、特に、交差点で対向する流入路の交通量が短い時間の間に時々刻々変化するような場合に、時差現示の方向を信号サイクル毎に可変とするのに適している方法である。このようなムーブメント制御の交通信号制御機の例として、複数のステップカウンタを備え、上り下りの信号制御を独立に行って、交差点の流入路ごとの交通状況に応じてリアルタイムな信号制御を可能とした交通信号制御機が開示されている(特許文献1参照)。
時差現示制御又はステータス変更制御が行われる交差点では、時差現示が同一方向のみに対して継続して行われるので、混雑方向とこれに対する制御方針が時間単位で区分でき、信号現示を時間帯別に固定化することができるとともに、それぞれの現示の青時間は、従来方式の中央制御及び端末(ギャップ)感応制御で計算することができる。
一方、ムーブメント制御が採用される交差点では、交差点で対向する流入路の交通量が短い時間の間に時々刻々変化するので、交通量の変化に応じて時差現示方向を切り替える必要がある。しかし、従来は、交差点で対向する流入路の直進及び左折現示での交通量を計測し、交通の途切れた方向の青信号(直進及び左折)を打ち切って対向方向に時差現示を与える方法が行われていた。
しかし、従来のムーブメント制御の方法では、直進及び左折現示での交通量を計測して信号サイクルの都度、時差現示を行っているので、例えば、上り方向の流入路の直進交通量が下り方向の流入路の直進交通量よりも多いとして、上り方向の流入路に対して時差現示を行った場合に、下り方向の流入路の右折交通量が上り方向の流入路の右折交通量よりも多いときは、下り方向の流入路の右折車を青信号(青矢現示など)で捌くことができず、かつ上り方向の流入路に対する時差現示(青矢現示など)を有効に活用できないという問題があった。
また、上述のように時差現示を有効に活用することができない場合、交差点の上流から新たな車両群が流入するときは、当該車両群の交差点での待ち時間が長くなり、さらに渋滞の原因となる可能性がある。また、対向する流入路の両方向で渋滞又は混雑している場合、どちらの方向の流入路に対して時差現示を行うかを判定することができず、時差現示を行うことができないという問題もあった。
本発明は、斯かる事情に鑑みてなされたものであり、有効な時差現示を実現することができる交通信号制御装置及び交通信号制御方法を提供することを目的とする。
第1発明に係る交通信号制御装置は、交差点で対向する流入路に対して時差現示を行うことができる交通信号制御装置において、前記流入路の交差点での各右折方向の交通情報を取得する右折情報取得手段と、該右折情報取得手段で取得した各右折方向の交通情報に基づいて時差現示を行うか否かを判定する時差現示判定手段とを備えることを特徴とする。
第2発明に係る交通信号制御装置は、第1発明において、前記流入路の交差点での少なくとも直進方向の交通情報を取得する交通情報取得手段を備え、前記時差現示判定手段は、前記交通情報取得手段で取得した交通情報に基づいて時差現示を行うか否かを判定するようにしてあることを特徴とする。
第3発明に係る交通信号制御装置は、第1発明又は第2発明において、前記右折情報取得手段で取得した交通情報に基づいて各右折方向の右折待ち車両の多少を判定する右折車両判定手段を備え、前記時差現示判定手段は、前記右折車両判定手段で判定した右折待ち車両の多少に応じて時差現示を行うか否かを判定するようにしてあり、前記時差現示判定手段で時差現示を行うと判定した場合、前記右折待ち車両の多少に応じて時差現示時間を決定する決定手段をさらに備えることを特徴とする。
第4発明に係る交通信号制御装置は、第3発明において、前記交通情報取得手段で取得した交通情報に基づいて前記流入路が混雑しているか否かを判定する混雑判定手段を備え、前記時差現示判定手段は、前記混雑判定手段で前記流入路のいずれか一方向が混雑していると判定した場合に、前記右折車両判定手段で前記一方向に沿って右折待ちをする車両が該一方向に対向する方向に沿って右折待ちをする車両より多いと判定したときは、前記一方向に対して時差現示を行うと判定するようにしてあることを特徴とする。
第5発明に係る交通信号制御装置は、第3発明又は第4発明において、前記時差現示判定手段は、前記右折車両判定手段で多少を判定した右折待ち車両台数の差分が所定値以上である場合、時差現示を行うと判定するようにしてあることを特徴とする。
第6発明に係る交通信号制御方法は、交差点で対向する流入路に対して時差現示を行うことができる交通信号制御装置による交通信号制御方法おいて、前記流入路の交差点での各右折方向の交通情報を取得するステップと、取得された各右折方向の交通情報に基づいて時差現示を行うか否かを判定するステップとを含むことを特徴とする。
第1発明及び第6発明にあっては、交差点で対向する流入路(交差点に流入する道路)の交差点での各右折方向の交通情報を取得し、取得した各右折方向の交通情報に基づいて時差現示を行うか否かを判定する。右折方向の交通情報は、例えば、右折車両の台数又は行列長などの交通量である。右折方向の交通情報は、例えば、交差点から所定距離だけ上流側に設置された車両感知器、交差点付近の右折車両を撮像することができる撮像装置、あるいは右折車両から送信されるプローブ情報などにより計測することができる。また、流入路の一方向からの右折方向の交通情報の取得時点は、当該一方向に対する直進及び左折青信号(現示)の終了時点(黄信号の開始時点)から所定時間前の時点とすることができる。所定時間は、時差現示を判定処理に要する時間に応じて設定することができる。
そして、交差点で対向する流入路の一方向からの右折車両の台数又は行列長が対向方向からの右折車両の台数又は行列長よりも多い又は長い場合、当該一方向に対して時差現示を行うと判定する。これにより、信号サイクルの都度、交差点で対向する流入路の右折交通量が変化する場合でも、変化する右折交通量に応じて時差現示を切り替えることができ、有効な時差現示を実現することができる。そして、右折交通量に基づいて時差現示を行うか否かを判定するので、例えば、東方向からの右折交通量が西方向からの右折交通量よりも多いときは、東方向に対して時差現示を行うと判定して、東方向からの右折車を青信号(青矢現示など)で捌くことができ、かつ東方向の時差現示(青矢現示など)を有効に活用することができる。
第2発明にあっては、流入路の交差点での少なくとも直進方向(直進方向、又は直進方向及び左折方向)の交通情報を取得し、取得した交通情報に基づいて時差現示を行うか否かを判定する。直進方向(直進方向、又は直進方向及び左折方向)の交通情報は、例えば、流入路の混雑度合を求めることができる情報であり、例えば、渋滞長、渋滞度、交通量、旅行時間、占有率、飽和度、負荷率、待ち行列台数などである。直進方向の交通情報は、交差点の上流に設置された車両感知器の計測結果から求めることができる。また、流入路の一方向からの直進方向の交通情報の取得時点は、当該一方向に対する直進及び左折青信号(現示)の終了時点(黄信号の開始時点)から所定時間前の時点とすることができる。所定時間は、時差現示を判定処理に要する時間に応じて設定することができる。
そして、交差点で対向する流入路の一方向からの直進方向の混雑度が閾値以上である場合、当該一方向に対して時差現示を行うと判定する。すなわち、交差点で対向する流入路のうち右折交通量が多く、直進方向の混雑度が閾値以上である流入路に対して時差現示を行うと判定するので、右折車両の処理のみならず直進(又は左折も含む)車両の処理も同じサイクル内の時差現示で行うことができ、交差点の円滑性を確保することができる。
第3発明にあっては、各右折方向の交通情報に基づいて各右折方向の右折待ち車両の多少を判定し、判定した右折待ち車両の多少に応じて時差現示を行うか否かを判定する。そして、時差現示を行うと判定した場合、右折待ち車両の多少に応じて時差現示時間を決定する。右折待ち車両の多少は、例えば、右折待ちの車両の台数の多少又は右折待ち行列長の長短で判定することができる。また、時差現示を行うか否かを判定する場合、右折待ち車両の台数が計測可能であれば右折待ち車両の台数を用い、待ち行列長が計測可能であれば、待ち行列長×車両密度により右折待ち車両の台数を求めることができる。そして、流入路の一方向からの右折待ち車両が、対向方向からの右折待ち車両よりも多いほど、時差現示時間が長くなるように決定することができる。これにより、ムーブメント制御を行う交差点において、時差現示の表示時間を最適化することができる。
第4発明にあっては、取得した直進方向(直進方向、又は直進方向及び左折方向)の交通情報に基づいて流入路が混雑しているか否かを判定する。混雑しているか否かは、例えば、渋滞長、渋滞度、交通量、旅行時間、占有率、飽和度、負荷率、待ち行列台数などの混雑度合を示す指標が所定の閾値を超えているか否かで判定することができる。そして、流入路のいずれか一方向が混雑していると判定した場合に、当該一方向に沿って右折待ちをする車両が当該一方向に対向する方向に沿って右折待ちをする車両より多いと判定したときは、当該一方向に対して時差現示を行うと判定する。例えば、東方向の流入路が混雑し、かつ東方向からの右折待ち車両が西方向からの右折待ち車両より多い場合、東方向に対して時差現示を行う。これにより、右折車両と直進車両(左折車両も含むことができる)とを同じ青信号(現示)で効率良く捌くことができるので、ムーブメント制御を行う交差点において、時差現示を行う方向を最適化することができる。
第5発明にあっては、多少を判定した右折待ち車両台数の差分が所定値以上である場合、時差現示を行うと判定する。例えば、東方向からの右折待ち車両が西方向からの右折待ち車両より多い場合に、東方向からの右折待ち車両と西方向からの右折待ち車両との台数の差分が、所定値(例えば、5台程度)以上である場合、東方向に対して時差現示を行う。これにより、時差現示を有効に活用することができる。
本発明によれば、信号サイクルの都度、交差点で対向する流入路の右折交通量が変化する場合でも、変化する右折交通量に応じて時差現示を切り替えることができ、有効な時差現示を実現することができる。
以下、本発明に係る交通信号制御装置の実施の形態を示す図面に基づいて説明する。図1は本実施の形態に係る交通信号制御装置10の構成の一例を示すブロック図である。交通信号制御装置10は、装置全体を制御するCPU11、右折情報取得手段及び交通情報取得手段としての交通情報取得部12、右折車両判定手段としての右折車両判定部13、灯色制御部14、混雑判定手段としての混雑判定部15、時差現示判定手段としての時差現示判定部16、決定手段としての時差現示時間決定部17などを備える。
本実施の形態の交通信号制御装置10は、ムーブメント制御を行うものであり、交差点で対向する流入路(交差点に流入する道路)の交通量(交通需要)の変化に応じて、信号サイクルの1サイクルの都度、時差現示を行うか否かを判定するとともに、時差現示を行う場合には、時差現示を行う方向(流入路の方向)、時差現示時間(例えば、対向方向の流入路に対する信号を赤信号にして時差現示を行う方向の流入路に対する青矢信号を含む青信号にする時間)を決定するものである。
交通情報取得部12は、交差点で対向する流入路の交差点での各右折方向の交通情報を取得する。右折方向の交通情報は、例えば、右折車両の台数又は行列長などの交通量である。右折方向の交通情報は、例えば、交差点から所定距離だけ上流側に設置された車両感知器、交差点付近の右折車両を撮像することができる撮像装置、あるいは右折車両から送信されるプローブ情報などにより計測することができる。また、一方向の流入路からの右折方向の交通情報の取得時点は、当該一方向の流入路に対する直進及び左折青信号(現示)の終了時点(黄信号の開始時点)から所定時間前の時点とすることができる。所定時間は、時差現示の判定処理に要する時間に応じて設定することができる。
また、交通情報取得部12は、流入路の交差点での少なくとも直進方向(直進方向、又は直進方向及び左折方向)の交通情報を取得する。直進方向(直進方向、又は直進方向及び左折方向)の交通情報は、例えば、流入路の混雑度合を求めることができる情報であり、例えば、渋滞長、渋滞度、交通量、旅行時間、占有率、飽和度、負荷率、待ち行列台数などである。直進方向の交通情報は、交差点の上流に設置された車両感知器の計測結果から求めることができる。また、流入路の一方向からの直進方向の交通情報の取得時点は、当該一方向の流入路に対する直進及び左折青信号(現示)の終了時点(黄信号の開始時点)から所定時間前の時点とすることができる。所定時間は、時差現示の判定処理に要する時間に応じて設定することができる。
右折車両判定部13は、交差点での各右折方向の交通情報に基づいて各右折方向の右折待ち車両の多少を判定する。右折待ち車両の多少は、例えば、右折待ちの車両の台数の多少又は右折待ち行列長の長短で判定することができる。
また、右折車両判定部13は、右折待ち車両の台数が計測可能(取得可能)であれば、右折待ち車両の台数を用いることができる。なお、待ち行列長が計測可能であれば、待ち行列長×車両密度により右折待ち車両の台数を求めることができる。
混雑判定部15は、取得した直進方向(直進方向、又は直進方向及び左折方向)の交通情報に基づいて流入路が混雑しているか否かを判定する。混雑しているか否かの判定は、例えば、速度が閾値(例えば、20km/h)以上か否か、あるいは、渋滞長が閾値(例えば、200m)以上であるか否かで行うことができる。また、流入路の適宜の箇所に光ビーコンを設置し、光ビーコン等で収集した車両のアップリンク情報に基づいて、光ビーコン間の旅行時間を算出し、この旅行時間に基づいて、流入路の混雑を判定することができる。また、超音波式の車両感知器等で計測した単位時間当たりの交通量や占有率などに基づいて、渋滞長を推定することもできる。
時差現示判定部16は、交通情報取得部12で取得した各右折方向の交通情報に基づいて時差現示を行うか否かを判定する。例えば、交差点で対向する流入路の東方向(一方向)からの右折車両の台数又は行列長が西方向(対向方向)からの右折車両の台数又は行列長よりも多い又は長い場合、東方向(一方向)に対して時差現示を行うと判定する。これにより、信号サイクルの都度、交差点で対向する流入路の右折交通量が変化する場合でも、変化する右折交通量に応じて時差現示を切り替えることができ、有効な時差現示を実現することができる。そして、右折交通量に基づいて時差現示を行うか否かを判定するので、例えば、東方向からの右折交通量が西方向からの右折交通量よりも多いときは、東方向に対して時差現示を行うと判定して、東方向からの右折車を青信号(青矢現示など)で捌くことができ、かつ東方向の時差現示(青矢現示など)を有効に活用することができる。
また、時差現示判定部16は、交通情報取得部12で取得した直進方向(直進方向、又は直進方向及び左折方向)の交通情報に基づいて時差現示を行うか否かを判定する。例えば、交差点で対向する流入路の東方向(一方向)からの直進方向の混雑度が閾値以上である場合、東方向(一方向)に対して時差現示を行うと判定する。すなわち、交差点で対向する流入路のうち右折交通量が多く、かつ、直進方向の混雑度が閾値以上である流入路に対して時差現示を行うと判定するので、右折車両の処理のみならず直進(又は左折も含む)車両の処理も同じサイクル内の時差現示で行うことができ、交差点の円滑性を確保することができる。
また、時差現示判定部16は、右折車両判定部13で判定した右折待ち車両の多少に応じて時差現示を行うか否かを判定する。時差現示を行うか否かを判定する場合、右折待ち車両の台数が取得可能であれば右折待ち車両の台数を用い、待ち行列長が取得可能であれば、待ち行列長×車両密度により右折待ち車両の台数を求めることができる。
より具体的には、時差現示判定部16は、混雑判定部15で流入路のいずれか一方向が混雑していると判定した場合に、当該一方向に沿って右折待ちをする車両が当該一方向に対向する方向に沿って右折待ちをする車両より多いと判定したときは、当該一方向に対して時差現示を行うと判定する。例えば、東方向の流入路が混雑し、かつ東方向からの右折待ち車両が西方向からの右折待ち車両より多い場合、東方向に対して時差現示を行う。これにより、右折車両と直進車両(左折車両も含むことができる)とを同じ青信号(現示)で効率良く捌くことができるので、ムーブメント制御を行う交差点において、時差現示を行う方向を最適化することができる。
また、時差現示判定部16は、右折車両判定部13で多少を判定した右折待ち車両台数の差分が所定値以上である場合、時差現示を行うと判定する。例えば、東方向からの右折待ち車両が西方向からの右折待ち車両より多い場合に、東方向からの右折待ち車両と西方向からの右折待ち車両との台数の差分が、所定値(例えば、5台程度)以上である場合、東方向に対して時差現示を行う。これにより、時差現示を有効に活用することができる。
時差現示時間決定部17は、時差現示判定部16で時差現示を行うと判定した場合、右折待ち車両の多少に応じて時差現示時間を決定する。例えば、交差点で対向する流入路の一方向からの右折待ち車両が、対向方向からの右折待ち車両よりも多いほど、時差現示時間が長くなるように決定することができる。
より具体的には、例えば、東方向からの右折待ち車両の台数をMeとし、西方向からの右折待ち車両台数をMwとする。Me−Mw≧所定値(例えば、5台程度)の場合、時差現示の表示時間を、(Me−Mw)×係数C(秒)により決定することができる。係数Cは、例えば、車両1台が交差点を右折するのに要する時間であり、2秒程度とすることができる。
対向する流入路の一方向からの右折待ち車両が、対向方向からの右折待ち車両よりも多いほど、時差現示時間が長くなるように決定することにより、ムーブメント制御を行う交差点において、時差現示の表示時間を最適化することができる。
灯色制御部14は、CPU11の指令に基づいて、交差点に設置された信号灯器へ灯色信号を出力する。これにより、信号灯器の灯色は、所定の順序及び表示時間で切り替わる。また、灯色制御部14は、時差現示判定部16で時差現示を行うと判定した場合に、判定された時差現示を行う方向に対して、時差現示時間決定部17で決定された時間の間、時差現示を行うべく交差点に設置された信号灯器へ灯色信号を出力する。
図2は本実施の形態の交通信号制御装置10による信号制御が行われる交差点の一例を示す模式図である。交差点は、4つの流入路(2つの路線1、2)が交差し、便宜上交差点で対向する流入路の一方の方向を東方向とし、対向する方向を西方向とする。なお、対向する方向は東西方向に限定されない。東方向へ走行する車両に対する(東方向に対する)信号灯器をE灯器と称し、西方向へ走行する車両に対する(西方向に対する)信号灯器をW灯器と称する。
E灯器、W灯器は、それぞれG、Y、R、左折の青矢、直進の青矢、右折の青矢の各灯色を有する。Gは青の灯色を示し、Yは黄の灯色を示し、Rは赤の灯色を示す。なお、常時左折が許可されるような交差点では、左折の矢印灯器はない。
交差点の上流の所定地点(例えば、右折専用車線の直進用車線からの分岐点付近で交差点から50m程度上流の地点)には、右折車両を検出するための車両感知器20を設置してある。車両感知器20で検出した右折車両の情報は、交通信号制御装置10へ送信される。
次に、時差現示を実施しない場合の現示階梯と時差現示を実施する場合の現示階梯について説明する。
図3は本実施の形態の交通信号制御装置10による時差現示を実施しない場合の現示階梯の一例を示す説明図である。図3の例は、デュアルリング方式を用いた場合を示す。図3において、二重線は赤信号(R)を示し、斜線は黄信号(Y)を示す。また、E直左は、E灯器の直進青、左折青を示し、W右はW灯器の右折青を示し、EYRは、E灯器のY(黄)、R(赤)を示す。E直左、W右及びEYRの各灯色は、リング1として、ステップ1、2…6の順序で切り替わる(歩進する)。
また、W直左は、W灯器の直進青、左折青を示し、E右はE灯器の右折青を示し、WYRは、W灯器のY(黄)、R(赤)を示す。W直左、E右及びWYRの各灯色は、リング2として、ステップ1、2…6の順序で切り替わる(歩進する)。デュアルリング方式のムーブメント制御では、リング1の灯色群とリング2の灯色群をお互いに独立に切り替える(歩進する)ことができる。
時差現示がない場合には、リング1のステップ1〜6と、リング2のステップ1〜6とは、それぞれ同じタイミングで遷移する。図3に示すように、ステップ1の場合、E灯器は、左折青、直進青、R(赤)が点灯状態となり、W灯器は、左折青、直進青、R(赤)が点灯状態となる。
ステップ2の場合、E灯器は、Y(黄)が点灯状態となり、W灯器は、Y(黄)が点灯状態となる。
ステップ3の場合、E灯器は、R(赤)が点灯状態となり、W灯器は、R(赤)が点灯状態となる。
ステップ4の場合、E灯器は、R(赤)、右折青が点灯状態となり、W灯器は、R(赤)、右折青が点灯状態となる。
ステップ5の場合、E灯器は、Y(黄)が点灯状態となり、W灯器は、Y(黄)が点灯状態となる。
ステップ6の場合、E灯器は、R(赤)が点灯状態となり、W灯器は、R(赤)が点灯状態となる。以下、東西方向の流入路に交差する流入路についても、同様の点灯状態を繰り返し、その後、東西方向の流入路について図3で示す現示階梯に基づいて同様の点灯状態を繰り返す。
次に、デュアルリング方式に代えて現示頁選択方式を用いる場合について説明する。現示頁選択方式は、予め複数の現示頁(信号灯器の灯色の組み合わせを含む階梯パターン)を用意しておき、信号サイクルの途中の所定のタイミングで次に実行する現示頁(階梯パターン)を選択するものである。
図4は本実施の形態の交通信号制御装置10による時差現示を実施しない場合の階梯パターンの一例を示す説明図である。なお、図4に例示する階梯パターンは、図3の現示階梯に対応するものである。なお、図3のステップ1〜6は、図4のステップ1〜9に対応する。
ステップ1〜4では、東方向のE灯器は、直左矢、R(赤)が点灯状態となり、西方向のW灯器は、直左矢、R(赤)が点灯状態となる。すなわち、ステップ1〜4では、東西両方向の流入路の車両は直進及び左折を行うことができる。
ステップ5では、東方向のE灯器は、Y(黄)が点灯状態となり、西方向のW灯器は、Y(黄)が点灯状態となる。
ステップ6では、東方向のE灯器は、R(赤)が点灯状態となり、西方向のW灯器は、R(赤)が点灯状態となる。
ステップ7では、東方向のE灯器は、右折矢、R(赤)が点灯状態となり、西方向のW灯器は、右折矢、R(赤)が点灯状態となる。すなわち、ステップ7では、東西両方向の流入路の車両の直進及び左折を赤信号で止め、車両の右折を行うことができる。
ステップ8では、東方向のE灯器は、Y(黄)が点灯状態となり、西方向のW灯器は、Y(黄)が点灯状態となる。
ステップ9では、東方向のE灯器は、R(赤)が点灯状態となり、西方向のW灯器は、R(赤)が点灯状態となる。ステップ9の次のステップは、例えば、南北方向の流入路に対して同様の階梯パターンを用いて信号制御を行うことができる。
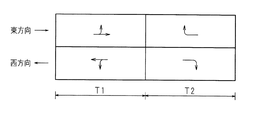
図5は時差現示を実施しない場合の流れ図の一例を示す説明図である。流れ図は、車両の進行可能な方向を模式的に示したものである。図5に示す流れ図は、図2、図3及び図4に対応するもので東西方向の流入路に右折専用車線を設けるとともに右折青矢現示を設けて右折車両を処理する場合のものである。なお、右折車と直進及び左折車とを分離する右直分離制御を採用することにより時差現示制御を行う場合の十分な安全性を確保することができる。なお、図5の例では東西方向の流入路について説明するが、流入路の方向は便宜上のものであって東西方向に限定されるものではない。
図5に示すように、時差現示を実施しない場合には、東西両方向の流入路に対して直進及び左折が時間T1の間可能であり、その後時間T2の間、東西両方向の流入路に対して右折のみが可能となる。図3及び図4との関連は、図3のステップ1〜2及び図4のステップ1〜5が時間T1に対応し、図3のステップ4〜5及び図4の7〜8が時間T2に対応する。なお、時間T1、T2にそれぞれ図3のステップ3、6及び図4の6、9を含めて考えてもよい。
次に、時差現示を実施する場合について説明する。図6は本実施の形態の交通信号制御装置10による時差現示を実施する場合の現示階梯の一例を示す説明図である。図6の例は、時差現示判定部16で、例えば、東方向の流入路の交通量(交通需要)が西方向の流入路の交通量(交通需要)よりも多いとして東方向の流入路に対して時差現示を設定する(すなわち、時差現示の間、西方向の流入路の車両を全赤で停止させる)場合の例を示す。図6において、二重線は赤信号(R)を示し、斜線(波線)は黄信号(Y)を示す。また、図6はデュアルリング方式を用いたムーブメント制御の場合を示す。
図6に示すように、リング1がステップ1、リング2がステップ1の場合、E灯器は、左折青、直進青、R(赤)が点灯状態となり、W灯器は、左折青、直進青、R(赤)が点灯状態となる。すなわち、東西両方向の流入路とも、直進と左折が可能となる。
次に、リング1がステップ1、リング2がステップ2の場合、E灯器は、左折青、直進青、R(赤)が点灯状態となり、W灯器は、Y(黄)が点灯状態となる。すなわち、西方向の流入路を走行する車両に対して直進青及び左折青が消灯し、黄信号が点灯する。
次に、リング1がステップ1、リング2がステップ3の場合、E灯器は、左折青、直進青、R(赤)が点灯状態となり、W灯器は、R(赤)が点灯状態となる。これにより、西方向の流入路での走行を停止させる。
次に、リング1がステップ1、リング2がステップ4の場合、E灯器は、左折青、直進青、R(赤)、右折青が点灯状態となり、W灯器は、R(赤)が点灯状態となる。このリング1がステップ1、リング2がステップ4の状態が時差現示であり、東方向の流入路を走行する車両は、左折、直進、右折をすることができ、西方向の流入路の車両は赤で停止する。
次に、リング1がステップ2、リング2がステップ4の場合、E灯器は、Y(黄)、右折青が点灯状態となり、W灯器は、R(赤)が点灯状態となる。すなわち、東方向の流入路を走行する車両に対して直進青及び左折青が消灯し、黄信号が点灯する。
次に、リング1がステップ3、リング2がステップ4の場合、E灯器は、R(赤)、右折青が点灯状態となり、W灯器は、R(赤)が点灯状態となる。これにより、東方向の流入路を走行する車両の直進及び左折走行を停止させる。
次に、リング1がステップ4、リング2がステップ4の場合、E灯器は、R(赤)、右折青が点灯状態となり、W灯器は、R(赤)、右折青が点灯状態となる。すなわち、東西両方向の流入路を走行する車両を右折走行させる。
次に、リング1がステップ5、リング2がステップ5の場合、E灯器は、Y(黄)が点灯状態となり、W灯器は、Y(黄)が点灯状態となる。
次に、リング1がステップ6、リング2がステップ6の場合、E灯器は、R(赤)が点灯状態となり、W灯器は、R(赤)が点灯状態となる。これにより、東西方向の流入路を走行する車両をすべて停止させる。以降は、例えば、南北方向の流入路に対して同様の灯色制御を行い、同様の点灯制御を繰り返す。なお、ステップ1の開始時点、ステップ6の終了時点は、バリアと称する。バリアは、交差点で交差する流入路の主道路と従道路など、信号制御を区分する必要があるタイミングを示す。
次に、デュアルリング方式に代えて現示頁選択方式を用いる場合について説明する。図7は本実施の形態の交通信号制御装置10による時差現示を実施する場合の階梯パターンの一例を示す説明図である。図7に例示する階梯パターンは、図6の現示階梯に対応するものであり、東方向の流入路に対して時差現示を行うものである。なお、図6のステップ1〜6は、図7のステップ1〜9に対応する。図7において、ステップ1、7〜9は、図4の時差現示を実施しない場合と同様であるので、説明は省略する。
ステップ2では、東方向のE灯器は、直左矢、R(赤)が点灯状態となり、西方向のW灯器は、Y(黄)が点灯状態となる。
ステップ3では、東方向のE灯器は、直左矢、R(赤)が点灯状態となり、西方向のW灯器は、R(赤)が点灯状態となる。
ステップ4では、東方向のE灯器は、直左矢、右折矢、R(赤)が点灯状態となり、西方向のW灯器は、R(赤)が点灯状態となる。すなわち、ステップ4では、西方向の流入路の車両をすべて赤信号で停止させ、東方向の流入路の車両は直進、左折及び右折を行うことができる。
ステップ5では、東方向のE灯器は、右折矢、Y(黄)が点灯状態となり、西方向のW灯器は、R(赤)が点灯状態となる。
ステップ6では、東方向のE灯器は、右折矢、R(赤)が点灯状態となり、西方向のW灯器は、R(赤)が点灯状態となる。すなわち、ステップ5〜6では、西方向の流入路の車両をすべて赤信号で停止させ、東方向の流入路の車両は右折を行うことができる。
図8は時差現示を実施する場合の流れ図の一例を示す説明図である。図8に示す流れ図は、図2、図5、図6及び図7に対応するものである。図8に示すように、時間T1の間では、東西両方向の流入路に対して直進及び左折が可能である。時間T1は、図6のリング1がステップ1であり、リング2がステップ1〜2(ステップ3を含めてもよい)である場合に対応し、あるいは図7のステップ1〜2(ステップ3を含めてもよい)に対応する。
時間T1の後に続く時間ΔT1の間では、東方向の流入路に対して、直進、左折及び右折が可能となり、時差現示を実施している状態を示す。時間ΔT1が時差現示表示時間に相当する。時間ΔT1は、図6のリング1がステップ1〜2(ステップ3を含めてもよい)であり、リング2がステップ4である場合に対応し、あるいは図7のステップ4〜5(ステップ6を含めてもよい)に対応する。
時間ΔT1の後に続く時間T3の間では、東西両方向の流入路に対して右折のみが可能となる。時間T3は、図6のリング1がステップ4〜5(ステップ6を含めてもよい)であり、リング2がステップ4〜5(ステップ6を含めてもよい)である場合に対応し、あるいは図7のステップ7〜8(ステップ9を含めてもよい)に対応する。
図9は時差現示を実施する場合の流れ図の他の例を示す説明図である。図8の例では、東方向の流入路に対して時差現示を実施する場合の流れ図を示したが、図9の例は西方向の流入路に対して時差現示を行う場合の流れ図を示す。図9に示すように、時間T1の間では、東西両方向の流入路に対して直進及び左折が可能である。
時間T1の後に続く時間ΔT2の間では、西方向の流入路に対して、直進、左折及び右折が可能となり、時差現示を実施している状態を示す。時間ΔT2が時差現示表示時間に相当する。
時間ΔT2の後に続く時間T4の間では、東西両方向の流入路に対して右折のみが可能となる。
次に、時差現示を実施する場合の青時間の打ち切り方法について説明する。例えば、図5に示す時間T1を青信号の基準青時間とする。青信号の表示時間は、基準青時間を基準に延長又は短縮される。そして、東西方向の流入路のうち東方向を主道路、西方向を従道路とする。例えば、主道路は、幹線道路など、従道路よりも平均的に交通量(交通需要)が多い道路である。
上述のような条件下で時差現示を実施する場合、東方向の流入路に対する青信号の表示時間である基準青時間を短縮しないように時差現示を行う。例えば、図9に示すように、西方向の流入路に対して時差現示を行う場合には、基準青時間T1を変えず、西方向の流入路の青時間をΔT2だけ延長することにより、時差現示表示時間ΔT2を確保し、青信号の打ち切りにより東方向(主道路)の基準青時間を短縮させないようにする。
図10は西方向の流入路に対して時差現示を実施する場合の比較例としての流れ図を示す説明図である。図10の例では、西方向の流入路に対して時差現示を行うため、東方向の流入路の基準青時間T1をΔT2だけ短縮している様子を示す。すなわち、東方向の流入路が主道路(例えば、幹線道路)であり、対向する西方向の流入路に対して時差現示を行う場合には、主道路(幹線道路)の交通の円滑化を維持するために、東方向の青時間を短縮させず西方向の青時間を延長させる図9の例の方が図10の例よりも好ましい。
図11は直進及び左折の交通量に基づく時差現示の比較例としての流れ図を示す説明図である。図11の例は、従来のムーブメント制御において実施されている場合を示し、交差点での右折車両の交通量を計測又は予測せずに、直進及び左折車両の交通量に基づいて時差現示を実施した場合の不都合な点を示すものである。
交通量の条件設定例として、例えば、東方向の流入路の直進及び左折車両の所定時間内での通過台数を60台とし、西方向の流入路の直進及び左折車両の所定時間内での通過台数を40台とする。また、東方向の流入路の右折車両の所定時間内での待ち台数を10台とし、西方向の流入路の右折車両の所定時間内での待ち台数を2台とする。
従来の直進及び左折の交通量に基づく時差現示を実施する場合、東方向の流入路の交通量が西方向の流入路の交通量よりも多いので、東方向の流入路に対して時差現示(時差現示表示時間ΔT)を行うことになる。すなわち、東方向の流入路の青時間が延長されるので、西方向の流入路からの右折車両は、右折できる時間が少なくなり右折車両を捌くことができない。また、東方向の流入路からの右折車両は、右折できる時間が多くなるものの右折車両が少ないので無駄な青時間が発生する。
本実施の形態では、右折交通量に基づいて時差現示を行うか否かを判定するとともに時差現示の方向を判定するので、例えば、東方向の流入路からの右折交通量が西方向の流入路からの右折交通量よりも多いときは、東方向の流入路に対して時差現示を行うと判定して、東方向の流入路からの右折車を青信号(青矢現示など)で捌くことができ、かつ東方向の流入路の時差現示(青矢現示など)を有効に活用することができる。
なお、時差現示を実施する場合、対向する流入路の一方向の右折交通量(例えば、右折待ち車両の台数、待ち行列長など)が対向方向の右折交通量よりも多い場合には、右折青時間を延長する。そして、当該一方向が混雑していない場合には、直進青時間及び左折青時間を変更せず、当該一方向が混雑している場合には、直進青時間及び左折青時間も延長することもできる。
図12は本実施の形態の交通信号制御装置10による信号制御が行われる交差点の他の例を示す模式図である。図2の例では右折専用車線が分離する付近に車両感知器20を設けて右折車両の交通情報(交通量)を検出するものであったが、右折車両の交通情報の検出(計測)は、車両感知器20に限定されない。図12に示すように、右折待ち台数又は右折待ち行列長を計測することができる画像感知器30、31(撮像装置)を交差点付近に設けることもできる。画像感知器30は、右折車両を前方から撮像する場合に設けられ、画像感知器31は、右折車両を後方から撮像する場合に設けられる。画像感知器30、31はいずれか一方だけ設置すればよい。
次に、本実施の形態の交通信号制御装置10の動作について説明する。図13及び図14は本実施の形態の交通信号制御装置10による時差現示処理の手順を示すフローチャートである。なお、図13及び図14の例では、交差点で対向する流入路の方向を東西方向と便宜上設定している。CPU11は、時差現示の判定タイミングであるか否かを判定する(S11)。時差現示の判定タイミングは、例えば、時差現示を行うか否かを判定する流入路に対する直進及び左折青信号(現示)の終了時点(黄信号の開始時点)から所定時間前の時点とすることができる。所定時間は、時差現示の判定処理に要する時間に応じて設定することができる。
時差現示の判定タイミングでない場合(S11でNO)、CPU11は、ステップS11の処理を続ける。時差現示の判定タイミングである場合(S11でYES)、CPU11は、直進方向、左折方向の交通情報を取得し(S12)、右折方向の交通情報を取得する(S13)。直進方向、左折方向の交通情報は、例えば、流入路の混雑度合を求めることができる情報であり、例えば、渋滞長、渋滞度、交通量、旅行時間、占有率、飽和度、負荷率、待ち行列台数などである。また、右折方向の交通情報は、例えば、右折車両の台数又は行列長などの交通量である。
CPU11は、東方向の流入路で混雑があるか否かを判定し(S14)、混雑がある場合(S14でYES)、東方向からの右折待ち車両台数から西方向からの右折待ち車両台数を差し引いた値(差分)が所定値以上であるか否かを判定する(S15)。所定値は、例えば、5台とすることができるが、流入路の状況に応じて他の値を設定することもできる。
差分が所定値以上である場合(S15でYES)、CPU11は、台数の差分に応じた時差現示表示時間を決定する(S16)。例えば、時差現示表示時間を差分×係数C(秒)により決定することができる。係数Cは、例えば、車両1台が交差点を右折するのに要する時間であり、2秒程度とすることができる。
東方向の流入路で混雑がない場合(S14でNO)、あるいは差分が所定値未満である場合(S15でNO)、CPU11は、後述のステップS17の処理を行う。
CPU11は、西方向の流入路で混雑があるか否かを判定し(S17)、混雑がある場合(S17でYES)、西方向からの右折待ち車両台数からと東方向からの右折待ち車両台数を差し引いた値(差分)が所定値以上であるか否かを判定する(S18)。所定値は、ステップS15の場合と同様である。
差分が所定値以上である場合(S18でYES)、CPU11は、台数の差分に応じた時差現示表示時間を決定し(S19)、決定した時差現示表示時間に基づいて時差現示を実施する(S20)。
西方向の流入路で混雑がない場合(S17でNO)、あるいは差分が所定値未満である場合(S18でNO)、CPU11は、時差現示を実施しない(S21)。CPU11は、処理を終了するか否かを判定し(S22)、処理を終了しない場合(S22でNO)、ステップS11以降の処理を続け、処理を終了すると判定した場合(S22でYES)、処理を終了する。
上述の時差現示処理において、ステップS12、ステップS14、及びステップS17の処理は省略してもよい。これにより、時差現示の判定処理、すなわち混雑判定に関連する処理を省略することにより、時差現示を実施するか否かの判定、時差現示の方向の判定及び時差現示の表示時間の判定に要する時間を短縮することができる。
上述の実施の形態の交通信号制御装置10は、交通信号制御機でもよく、交通信号制御機を制御する制御装置又は上位装置等であってもよい。
上述の実施の形態では、対向する流入路の方向を、それぞれ東方向、西方向として説明したが、これに限定するものではない。また、交差点は、十字状に交差するものに限定されるものではなく、三叉路、五叉路など、時差現示を行い得る交差点であればどのような構造の交差点においても本実施の形態の交通信号制御装置10を用いることができる。
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
11 CPU
12 交通情報取得部(右折情報取得手段、交通情報取得手段)
13 右折車両判定部(右折車両判定手段)
14 灯色制御部
15 混雑判定部(混雑判定手段)
16 時差現示判定部(時差現示判定手段)
17 時差現示時間決定部(決定手段)
12 交通情報取得部(右折情報取得手段、交通情報取得手段)
13 右折車両判定部(右折車両判定手段)
14 灯色制御部
15 混雑判定部(混雑判定手段)
16 時差現示判定部(時差現示判定手段)
17 時差現示時間決定部(決定手段)
Claims (6)
- 交差点で対向する流入路に対して時差現示を行うことができる交通信号制御装置において、
前記流入路の交差点での各右折方向の交通情報を取得する右折情報取得手段と、
該右折情報取得手段で取得した各右折方向の交通情報に基づいて時差現示を行うか否かを判定する時差現示判定手段と
を備えることを特徴とする交通信号制御装置。 - 前記流入路の交差点での少なくとも直進方向の交通情報を取得する交通情報取得手段を備え、
前記時差現示判定手段は、
前記交通情報取得手段で取得した交通情報に基づいて時差現示を行うか否かを判定するようにしてあることを特徴とする請求項1に記載の交通信号制御装置。 - 前記右折情報取得手段で取得した交通情報に基づいて各右折方向の右折待ち車両の多少を判定する右折車両判定手段を備え、
前記時差現示判定手段は、
前記右折車両判定手段で判定した右折待ち車両の多少に応じて時差現示を行うか否かを判定するようにしてあり、
前記時差現示判定手段で時差現示を行うと判定した場合、前記右折待ち車両の多少に応じて時差現示時間を決定する決定手段をさらに備えることを特徴とする請求項1又は請求項2に記載の交通信号制御装置。 - 前記交通情報取得手段で取得した交通情報に基づいて前記流入路が混雑しているか否かを判定する混雑判定手段を備え、
前記時差現示判定手段は、
前記混雑判定手段で前記流入路のいずれか一方向が混雑していると判定した場合に、前記右折車両判定手段で前記一方向に沿って右折待ちをする車両が該一方向に対向する方向に沿って右折待ちをする車両より多いと判定したときは、前記一方向に対して時差現示を行うと判定するようにしてあることを特徴とする請求項3に記載の交通信号制御装置。 - 前記時差現示判定手段は、
前記右折車両判定手段で多少を判定した右折待ち車両台数の差分が所定値以上である場合、時差現示を行うと判定するようにしてあることを特徴とする請求項3又は請求項4に記載の交通信号制御装置。 - 交差点で対向する流入路に対して時差現示を行うことができる交通信号制御装置による交通信号制御方法おいて、
前記流入路の交差点での各右折方向の交通情報を取得するステップと、
取得された各右折方向の交通情報に基づいて時差現示を行うか否かを判定するステップと
を含むことを特徴とする交通信号制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011249839A JP2012133760A (ja) | 2010-12-01 | 2011-11-15 | 交通信号制御装置及び交通信号制御方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010268631 | 2010-12-01 | ||
| JP2010268631 | 2010-12-01 | ||
| JP2011249839A JP2012133760A (ja) | 2010-12-01 | 2011-11-15 | 交通信号制御装置及び交通信号制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012133760A true JP2012133760A (ja) | 2012-07-12 |
Family
ID=46649242
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011249839A Pending JP2012133760A (ja) | 2010-12-01 | 2011-11-15 | 交通信号制御装置及び交通信号制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012133760A (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102808365A (zh) * | 2012-08-29 | 2012-12-05 | 周家齐 | 一种城市交叉路口电子程控左转时间车道的方法 |
| CN103021190A (zh) * | 2012-12-20 | 2013-04-03 | 长沙理工大学 | 一种优化信号交叉口排队长度的方法 |
| JP2014149797A (ja) * | 2013-02-04 | 2014-08-21 | Sumitomo Electric Ind Ltd | 信号制御システム及び走行情報抽出装置 |
| CN104599512A (zh) * | 2015-01-28 | 2015-05-06 | 深圳市汇川技术股份有限公司 | 一种红绿灯自动调节方法、自动调节系统及红绿灯系统 |
| JP2015166974A (ja) * | 2014-03-04 | 2015-09-24 | 住友電工システムソリューション株式会社 | 交通信号制御装置および交通信号制御方法 |
| CN105006158A (zh) * | 2015-06-25 | 2015-10-28 | 广东工业大学 | 一种基于实时交通信息的单交叉口交通信号控制方法 |
| JP2017004370A (ja) * | 2015-06-12 | 2017-01-05 | 日本電気通信システム株式会社 | 信号制御装置、信号制御システム、信号制御方法、及び信号制御プログラム |
| JP2018133353A (ja) * | 2017-02-13 | 2018-08-23 | ファスフォードテクノロジ株式会社 | 半導体製造装置および半導体装置の製造方法 |
| GB2566098A (en) * | 2017-09-05 | 2019-03-06 | Jaguar Land Rover Ltd | Apparatus and method for determining following vehicle information |
| CN112289045A (zh) * | 2020-10-19 | 2021-01-29 | 智邮开源通信研究院(北京)有限公司 | 交通信号控制方法、装置、电子设备及可读存储介质 |
| CN113947908A (zh) * | 2021-10-29 | 2022-01-18 | 沈阳世纪高通科技有限公司 | 浮动车排队长度计算收费站以及红绿灯实时路况信息技术 |
| CN114283575A (zh) * | 2020-09-27 | 2022-04-05 | 上海交通大学 | 基于视频监控数据的信号灯交叉路口排队长度估计方法 |
| JP2022065133A (ja) * | 2021-05-14 | 2022-04-26 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 信号機の制御方法、装置及びシステム |
| CN114708743A (zh) * | 2022-03-17 | 2022-07-05 | 南京理工大学 | 基于尾车驶离模型的干线周期分配方法及系统 |
| WO2023286221A1 (ja) * | 2021-07-14 | 2023-01-19 | 日本電気株式会社 | 信号制御システム、装置、方法、及びコンピュータ可読媒体 |
-
2011
- 2011-11-15 JP JP2011249839A patent/JP2012133760A/ja active Pending
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102808365A (zh) * | 2012-08-29 | 2012-12-05 | 周家齐 | 一种城市交叉路口电子程控左转时间车道的方法 |
| CN102808365B (zh) * | 2012-08-29 | 2014-07-16 | 周家齐 | 一种城市交叉路口电子程控左转时间车道的方法 |
| CN103021190A (zh) * | 2012-12-20 | 2013-04-03 | 长沙理工大学 | 一种优化信号交叉口排队长度的方法 |
| JP2014149797A (ja) * | 2013-02-04 | 2014-08-21 | Sumitomo Electric Ind Ltd | 信号制御システム及び走行情報抽出装置 |
| JP2015166974A (ja) * | 2014-03-04 | 2015-09-24 | 住友電工システムソリューション株式会社 | 交通信号制御装置および交通信号制御方法 |
| CN104599512A (zh) * | 2015-01-28 | 2015-05-06 | 深圳市汇川技术股份有限公司 | 一种红绿灯自动调节方法、自动调节系统及红绿灯系统 |
| JP2017004370A (ja) * | 2015-06-12 | 2017-01-05 | 日本電気通信システム株式会社 | 信号制御装置、信号制御システム、信号制御方法、及び信号制御プログラム |
| CN105006158A (zh) * | 2015-06-25 | 2015-10-28 | 广东工业大学 | 一种基于实时交通信息的单交叉口交通信号控制方法 |
| JP2018133353A (ja) * | 2017-02-13 | 2018-08-23 | ファスフォードテクノロジ株式会社 | 半導体製造装置および半導体装置の製造方法 |
| GB2566098A (en) * | 2017-09-05 | 2019-03-06 | Jaguar Land Rover Ltd | Apparatus and method for determining following vehicle information |
| GB2566098B (en) * | 2017-09-05 | 2020-10-07 | Jaguar Land Rover Ltd | Apparatus and method for determining following vehicle information |
| CN114283575A (zh) * | 2020-09-27 | 2022-04-05 | 上海交通大学 | 基于视频监控数据的信号灯交叉路口排队长度估计方法 |
| CN114283575B (zh) * | 2020-09-27 | 2023-02-07 | 上海交通大学 | 基于视频监控数据的信号灯交叉路口排队长度估计方法 |
| CN112289045A (zh) * | 2020-10-19 | 2021-01-29 | 智邮开源通信研究院(北京)有限公司 | 交通信号控制方法、装置、电子设备及可读存储介质 |
| JP2022065133A (ja) * | 2021-05-14 | 2022-04-26 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 信号機の制御方法、装置及びシステム |
| JP7302052B2 (ja) | 2021-05-14 | 2023-07-03 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 信号機の制御方法、装置及びシステム |
| WO2023286221A1 (ja) * | 2021-07-14 | 2023-01-19 | 日本電気株式会社 | 信号制御システム、装置、方法、及びコンピュータ可読媒体 |
| CN113947908A (zh) * | 2021-10-29 | 2022-01-18 | 沈阳世纪高通科技有限公司 | 浮动车排队长度计算收费站以及红绿灯实时路况信息技术 |
| CN114708743A (zh) * | 2022-03-17 | 2022-07-05 | 南京理工大学 | 基于尾车驶离模型的干线周期分配方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012133760A (ja) | 交通信号制御装置及び交通信号制御方法 | |
| JP4955628B2 (ja) | パケット交通管制システム | |
| JP5772528B2 (ja) | 時差現示評価支援装置及び時差現示評価支援方法 | |
| CN103985261B (zh) | 基于车辆排队长度测算的交通信号灯控制方法及系统 | |
| JP5766719B2 (ja) | 交通信号制御系統、設計方法及び専用装置 | |
| CN106097735B (zh) | 基于平面感知检测技术的潮汐车道信号灯控制方法及系统 | |
| JP6019932B2 (ja) | 交通信号制御機 | |
| JP5477080B2 (ja) | 渋滞判定装置及びコンピュータプログラム | |
| JP2007148849A (ja) | 信号制御システム | |
| CN103871258A (zh) | 一种交叉口防锁死的信号控制方法 | |
| JP2010205205A (ja) | 信号制御装置 | |
| JP2008165687A (ja) | 交通システム、交通信号制御機および信号制御装置 | |
| JP2012108664A (ja) | 交通信号制御装置及び交通信号制御方法 | |
| JP2012113610A (ja) | 推奨基準速度算出装置 | |
| JP2011113503A (ja) | 運転支援装置 | |
| JP3412779B2 (ja) | 交通信号制御方法 | |
| JP5381594B2 (ja) | 交通信号制御システム | |
| JP2002024989A (ja) | 信号機制御システム、信号機制御装置、交通情報提供システム、交通情報提供装置および交通情報提供方法 | |
| JP4590055B2 (ja) | 特定車両優先制御方法及びその装置 | |
| JP2013080445A (ja) | 先詰判定装置、コンピュータプログラム及び先詰判定方法 | |
| JP5716357B2 (ja) | 交通信号制御装置及び交通信号制御方法 | |
| JP4565697B2 (ja) | 交通信号制御方法 | |
| JP2011192050A (ja) | 渋滞判定装置及びコンピュータプログラム | |
| JP6421925B2 (ja) | 運転支援システム、交通情報生成装置および経路案内装置 | |
| JP2923880B2 (ja) | 交通管理システム |