JP2012105486A - 電動車両 - Google Patents
電動車両 Download PDFInfo
- Publication number
- JP2012105486A JP2012105486A JP2010253224A JP2010253224A JP2012105486A JP 2012105486 A JP2012105486 A JP 2012105486A JP 2010253224 A JP2010253224 A JP 2010253224A JP 2010253224 A JP2010253224 A JP 2010253224A JP 2012105486 A JP2012105486 A JP 2012105486A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- road surface
- electric vehicle
- determination unit
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Regulating Braking Force (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
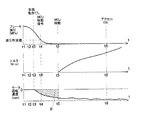
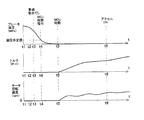
【解決手段】車両駆動用のモータで走行する電動車両1において、モータ2の作動中にモータ2の停止条件が成立した場合にはモータ2を自動的に停止させると共に、停止条件が解除された場合にモータ2を再始動させるモータコントロール部10と、停止条件が解除されてから所定時間までのモータ2の回転速度を積算して積算値を算出し、積算値に基づいて路面の傾斜状態を判定する路面傾斜判定部12とを備える。
【選択図】図1
Description
2 モータ
3 バッテリー
4 ECU
5 ブレーキ油圧検出部
6 アクセル検出部
7 車速検出部
8 ポジション検出部
9 トルク検出部
10 MCU
11 停止・再始動判定部
12 路面傾斜判定部
21 モータ回転速度積算部
22 クリープトルク判定部
23 路面判定部
24 傾斜状態判定部
Claims (5)
- 車両駆動用のモータで走行する電動車両において、
前記モータの作動中に前記モータの停止条件が成立した場合には前記モータを自動的に停止させると共に、前記停止条件が解除された場合に前記モータを再始動させるモータコントロール部と、
前記停止条件が解除されてから所定時間までの前記モータの回転速度を積算して積算値を算出し、前記積算値に基づいて路面の傾斜状態を判定する路面傾斜判定部とを備えることを特徴とする電動車両。 - 前記モータコントロール部は、ブレーキの油圧が所定値未満であるとき、前記停止条件が解除されたと判断することを特徴とする請求項1記載の電動車両。
- 前記モータコントロール部は、クリープトルクを発生させるクリープトルク発生手段を有し、前記所定時間とは、前記クリープトルク発生手段がクリープトルクの発生を開始させる時間であることを特徴とする請求項1又は2に記載の電動車両。
- 前記路面傾斜判定部は、前記積算値が大きいほど傾斜の勾配が大きいと判定することを特徴とする請求項1〜3のいずれかに記載の電動車両。
- 前記モータコントロール部は、前記モータを再始動させる際、判定された前記傾斜状態に応じて前記モータの出力トルクを制御することを特徴とする請求項1〜4のいずれかに記載の電動車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010253224A JP5601466B2 (ja) | 2010-11-11 | 2010-11-11 | 電動車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010253224A JP5601466B2 (ja) | 2010-11-11 | 2010-11-11 | 電動車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012105486A true JP2012105486A (ja) | 2012-05-31 |
| JP5601466B2 JP5601466B2 (ja) | 2014-10-08 |
Family
ID=46395208
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010253224A Expired - Fee Related JP5601466B2 (ja) | 2010-11-11 | 2010-11-11 | 電動車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5601466B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9762165B2 (en) | 2012-08-09 | 2017-09-12 | Mitsubishi Electric Corporation | Control device for electric car |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09327101A (ja) * | 1996-06-06 | 1997-12-16 | Denso Corp | 電気自動車の制御装置 |
| JP2000308209A (ja) * | 1999-04-22 | 2000-11-02 | Toyota Motor Corp | ハイブリッド車の動力装置 |
| JP2002021627A (ja) * | 2000-07-04 | 2002-01-23 | Mitsubishi Motors Corp | 坂路判定装置 |
| JP2006311644A (ja) * | 2005-04-26 | 2006-11-09 | Nissan Motor Co Ltd | 車両用駆動制御装置 |
| JP2007185070A (ja) * | 2006-01-10 | 2007-07-19 | Toyota Motor Corp | 車両の制御装置 |
-
2010
- 2010-11-11 JP JP2010253224A patent/JP5601466B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09327101A (ja) * | 1996-06-06 | 1997-12-16 | Denso Corp | 電気自動車の制御装置 |
| JP2000308209A (ja) * | 1999-04-22 | 2000-11-02 | Toyota Motor Corp | ハイブリッド車の動力装置 |
| JP2002021627A (ja) * | 2000-07-04 | 2002-01-23 | Mitsubishi Motors Corp | 坂路判定装置 |
| JP2006311644A (ja) * | 2005-04-26 | 2006-11-09 | Nissan Motor Co Ltd | 車両用駆動制御装置 |
| JP2007185070A (ja) * | 2006-01-10 | 2007-07-19 | Toyota Motor Corp | 車両の制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9762165B2 (en) | 2012-08-09 | 2017-09-12 | Mitsubishi Electric Corporation | Control device for electric car |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5601466B2 (ja) | 2014-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7516007B2 (en) | Anti-rollback control for hybrid and conventional powertrain vehicles | |
| KR101684500B1 (ko) | 하이브리드 차량의 엔진 제어 방법 | |
| KR101588789B1 (ko) | 구동 모터를 구비한 차량의 크립 토크 제어 방법 및 장치 | |
| JP5338351B2 (ja) | ハイブリッド車両の制御装置 | |
| CN103124843B (zh) | 车辆控制器 | |
| US9199590B2 (en) | Vehicle control device, vehicle, and vehicle control method | |
| JP5928576B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6565699B2 (ja) | 車両制御装置 | |
| KR101684507B1 (ko) | 하이브리드 차량의 제어 시스템 및 방법 | |
| JP2009090735A (ja) | ハイブリッド車両の制御装置 | |
| JP5737203B2 (ja) | エンジン制御装置 | |
| WO2015087516A2 (en) | Vehicle control apparatus | |
| CN104002679A (zh) | 车用控制装置 | |
| JP2005133682A (ja) | ハイブリッド車両用定速走行制御装置 | |
| KR101724465B1 (ko) | 하이브리드 차량의 엔진 기동 제어 방법 및 장치 | |
| JP2000008902A (ja) | 車両用定速走行制御システム | |
| JP6436240B2 (ja) | 車両走行制御方法及び車両走行制御装置 | |
| JP2009126303A (ja) | 車両制御装置 | |
| JP2005304182A (ja) | ハイブリッド車両の制御装置 | |
| JP5428898B2 (ja) | 車両の制御方法及び車両の制御装置 | |
| JP5185052B2 (ja) | 車両の制御装置および制御方法 | |
| JP3594010B2 (ja) | 車両の駆動力制御方法とその制御装置 | |
| JP5601466B2 (ja) | 電動車両 | |
| JP2017030598A (ja) | ハイブリッド車両及びその制御方法 | |
| JP7385454B2 (ja) | 車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121012 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140331 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140805 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5601466 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |