JP2011509064A - 電気機械用ロータ - Google Patents
電気機械用ロータ Download PDFInfo
- Publication number
- JP2011509064A JP2011509064A JP2010541100A JP2010541100A JP2011509064A JP 2011509064 A JP2011509064 A JP 2011509064A JP 2010541100 A JP2010541100 A JP 2010541100A JP 2010541100 A JP2010541100 A JP 2010541100A JP 2011509064 A JP2011509064 A JP 2011509064A
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- magnet
- opening
- magnets
- rotor portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2793—Rotors axially facing stators
- H02K1/2795—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/28—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/28—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures
- H02K1/30—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures using intermediate parts, e.g. spiders
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Abstract
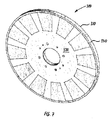
【選択図】図7
Description
Claims (23)
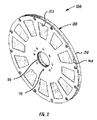
- 軸方向磁束電気機械用のロータであって、
前記ロータはロータに固定された複数の永久磁石を有し、
前記複数の磁石のそれぞれは前記ロータ内の開口部を少なくとも部分的に通って延び、
前記ロータの回転軸に対して実質的に円周方向に、かつ少なくとも一つの軸方向において実質的に軸方向に前記磁石を位置決めするために、前記ロータの材料が前記磁石と接触するように構成されることを特徴とするロータ。 - 両方の軸方向において実質的に軸方向に前記磁石を位置決めするように前記ロータの材料が各磁石と接触することを特徴とする請求項1に記載のロータ。
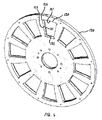
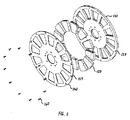
- 前記ロータが第1ロータ部分と第2ロータ部分を備え、二つのロータ部分の間に磁石を置いた状態で前記第2ロータ部分を前記第1ロータ部分にはめ合わせて、二つのロータ部分の間で実質的に接線方向に、実質的に半径方向に、および実質的に軸方向に前記磁石を位置決めするように構成される構成されることを特徴とする請求項1または2に記載のロータ。
- 前記第1ロータ部分と前記第2ロータ部分が、両者の間で半径方向に前記磁石を包み込むように構成されることを特徴とする請求項3に記載のロータ。
- 前記第1ロータ部分が、円周方向と一つの半径方向の実質的に両方で前記磁石と接触するように構成されることを特徴とする請求項4に記載のロータ。
- 前記第2ロータ部分が、他方の半径方向で実質的に前記磁石のうちの少なくとも一部と接触するよう構成されることを特徴とする請求項5に記載のロータ。
- 前記第1ロータ部分がその内部に形成された開口部を有し、各開口部がそれぞれ磁石を受け入れる大きさにされることを特徴とする請求項4ないし6のいずれかに記載のロータ。
- 前記磁石および/または前記第1ロータ部分に前記磁石を軸方向に位置決めする構造が設けられていることを特徴とする請求項4ないし7のいずれかに記載のロータ。
- 前記磁石および前記第1ロータ部分に、前記磁石を半径方向に位置決めするように協調する協調構造が設けられていることを特徴とする請求項8に記載のロータ。
- 前記協調構造がさね継ぎ構成を備えることを特徴とする請求項9に記載のロータ。
- 前記第2ロータ部分が、中に磁石を受け入れた前記第1ロータ部分の全体またはその一部を包囲するように構成された実質的に環状の部分または実質的に環状の部分の一部であることを特徴とする請求項4ないし10のいずれかに記載のロータ。
- 前記第2ロータ部分が前記第1ロータ部分の周りに巻き付けられたテープの形状であることを特徴とする請求項4ないし11のいずれかに記載のロータ。
- 前記第2ロータ部分に保持リングが設けられることを特徴とする請求項4ないし11のいずれかに記載のロータ。
- 前記第1ロータ部分および第2ロータ部分が、両者の間で軸方向に前記磁石を包み込むように構成されることを特徴とする請求項3に記載のロータ。
- 各ロータ部分がロータディスクのそれぞれの面を含むことを特徴とする請求項3ないし14のいずれかに記載のロータ。
- 各ロータ部分が貫通する開口部を備え、各開口部がそれぞれ磁石を受け入れる大きさにされることを特徴とする請求項3、14または15に記載のロータ。
- 前記磁石が開口部を通り抜けることを防止するために開口部内に受け入れた磁石と接触する接触手段が各開口部に隣接して各ロータ部分に設けられていることを特徴とする請求項16に記載のロータ。
- 前記接触手段が各ロータ部分の一面と接触することを特徴とする請求項17に記載のロータ。
- 二つの磁石が各開口部に受け入れられ、前記二つの磁石が軸方向に並置され、前記ロータは、第1軸方向で前記二つの磁石のうち第1の磁石を、第2軸方向で前記二つの磁石のうち第2の磁石を受け入れるように構成され、各開口部の一つ以上の側壁が、それぞれの磁石の一方または両方が開口部内に受け入れられたときに磁石と接触する接触部材を備えることを特徴とする請求項1ないし18のいずれかに記載のロータ。
- 各開口部内の前記二つの磁石が引き付け合うように磁化されており、これによって軸方向に位置決めされることを特徴とする請求項19に記載のロータ。
- 前記磁石の軸方向の分離に少なくとも部分的に抵抗するために前記二つの磁石の間に接着剤が付加されることを特徴とする請求項20に記載のロータ。
- 前記ロータが、複合材料などの磁気絶縁材料および/または電気絶縁材料で構成されることを特徴とする請求項1ないし20のいずれかに記載のロータ。
- 請求項1ないし22に記載の少なくとも一つのロータを備える軸方向磁束電気機械。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB0800225.5A GB0800225D0 (en) | 2008-01-07 | 2008-01-07 | A rotor for an electrical machine |
| PCT/GB2009/000032 WO2009087376A2 (en) | 2008-01-07 | 2009-01-07 | A rotor for an electrical machin |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011509064A true JP2011509064A (ja) | 2011-03-17 |
| JP2011509064A5 JP2011509064A5 (ja) | 2012-02-23 |
Family
ID=39111212
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010541100A Pending JP2011509064A (ja) | 2008-01-07 | 2009-01-07 | 電気機械用ロータ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8624456B2 (ja) |
| EP (1) | EP2243209B1 (ja) |
| JP (1) | JP2011509064A (ja) |
| CN (1) | CN101919140B (ja) |
| GB (2) | GB0800225D0 (ja) |
| WO (1) | WO2009087376A2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017229136A (ja) * | 2016-06-21 | 2017-12-28 | アスモ株式会社 | アキシャルギャップモータ用ロータ及びアキシャルギャップモータ |
| JP2020511923A (ja) * | 2017-03-22 | 2020-04-16 | ホワイロット エスアエス | メッシュ構造体に統合された複数の単位磁石を有する磁石構造体 |
| WO2020255435A1 (ja) * | 2019-06-20 | 2020-12-24 | 株式会社日立産機システム | アキシャルギャップ型回転電機 |
| JP2022500976A (ja) * | 2018-09-24 | 2022-01-04 | ホワイロット | 磁石と、異なる方向の繊維を備えた複合材料層の本体を有する軸方向磁束ロータ |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITMO20110252A1 (it) * | 2011-09-30 | 2013-03-31 | Montanari Giulio & C S R L | Rotore a magneti permanenti per macchina elettrica rotativa |
| JP2013162677A (ja) * | 2012-02-07 | 2013-08-19 | Denso Corp | アキシャルギャップ型回転電機および車輪 |
| FR2996377B1 (fr) * | 2012-10-03 | 2016-07-22 | Renault Sas | Rotor pour machine electrique |
| DE202012012228U1 (de) | 2012-12-20 | 2013-02-01 | Klaus-Dieter Nies | Rotor für eine Maschinenwelle einer Elektrischen Axialflussmaschine |
| GB2511320A (en) * | 2013-02-27 | 2014-09-03 | Yasa Motors Ltd | Axial flux motor |
| DE202013006718U1 (de) | 2013-07-26 | 2013-08-20 | Klaus-Dieter Nies | Rotor für eine Maschinenwelle einer elektrischen Axialflussmaschine |
| JP6255231B2 (ja) * | 2013-12-11 | 2017-12-27 | 株式会社ダイナックス | アキシャルギャップモータ |
| BR112017020080A2 (pt) * | 2014-03-21 | 2018-06-05 | Evans Electric Pty Ltd | rotor para uma máquina elétrica |
| JP6137019B2 (ja) * | 2014-03-28 | 2017-05-31 | マツダ株式会社 | アキシャルギャップ型回転電機 |
| DE102015208281A1 (de) | 2015-05-05 | 2016-11-10 | Robert Bosch Gmbh | Rotor für Axialflussmaschine |
| DE102015220124A1 (de) | 2015-10-15 | 2017-04-20 | Robert Bosch Gmbh | Rotor für Scheibenläufermaschine |
| WO2017177341A1 (en) | 2016-04-13 | 2017-10-19 | Genesis Robotics Llp | Axial flux electric machine comprising a radially inner thrust bearing and a radially outer thrust bearing |
| DE102016214760B4 (de) | 2016-04-28 | 2018-03-01 | Mtu Friedrichshafen Gmbh | Verfahren zum Betrieb einer Brennkraftmaschine, Einrichtung zum Steuern und/oder Regeln einer Brennkraftmaschine, Einspritzsystem und Brennkraftmaschine |
| PL233865B1 (pl) * | 2017-07-28 | 2019-12-31 | Equelo Spólka Z Ograniczona Odpowiedzialnoscia | Maszyna elektryczna |
| CN107492962A (zh) * | 2017-08-31 | 2017-12-19 | 杭州中豪电动科技股份有限公司 | 一种盘式电机的磁钢固定结构 |
| CN107482813A (zh) * | 2017-10-10 | 2017-12-15 | 武汉索特南洋电机有限公司 | 盘式电机转子结构及盘式电机 |
| JP2019161723A (ja) * | 2018-03-08 | 2019-09-19 | 株式会社日立産機システム | アキシャルギャップ型回転電機 |
| DE102018210164B3 (de) * | 2018-06-22 | 2019-09-26 | Hs Products Engineering Gmbh | Verfahren zur Herstellung eines Läufers für einen Elektroflachmotor, Läufer und Elektroflachmotor |
| CN108808921B (zh) * | 2018-08-31 | 2024-02-27 | 上海盘毂动力科技股份有限公司 | 一种盘式转子及盘式电机 |
| US10892654B2 (en) * | 2018-11-09 | 2021-01-12 | Shenzhen Shanxiang Intelligent Technology Enterprise | Axial magnetic field motor with grain-oriented silicon steel sheets |
| CN109639005A (zh) * | 2019-01-25 | 2019-04-16 | 三门峡速达交通节能科技股份有限公司 | 车辆、盘式电机的转子及盘式电机 |
| CN110350747A (zh) * | 2019-03-08 | 2019-10-18 | 贵州航天林泉电机有限公司 | 一种轴向磁通电机转子结构 |
| DE102019124185A1 (de) * | 2019-09-10 | 2021-03-11 | Schaeffler Technologies AG & Co. KG | Elektromotor, Rotor und Verfahren zur Magnetbefestigung in einem Rotor |
| CN110707845A (zh) * | 2019-09-18 | 2020-01-17 | 广州通达汽车电气股份有限公司 | 转子结构及电机 |
| EP3832860A1 (en) | 2019-12-05 | 2021-06-09 | Phi-Power AG | Single sided axial flux electrical machine with additional passive stator |
| CN111211630B (zh) * | 2020-01-21 | 2021-02-19 | 杭州中豪电动科技有限公司 | 盘式电机转子 |
| CN111181337B (zh) * | 2020-02-26 | 2021-12-21 | 安徽美芝精密制造有限公司 | 转子总成及其装配方法、电机和电动车辆 |
| FR3107999B1 (fr) | 2020-03-06 | 2023-06-23 | Renault Sas | Rotor pour machine électromagnétique à flux axial |
| FR3112907A1 (fr) * | 2020-07-27 | 2022-01-28 | Conseil Et Technique | Rotor à structure composite pour machine électrique à flux axial |
| CN112018916B (zh) * | 2020-08-24 | 2021-06-25 | 上海盘毂动力科技股份有限公司 | 盘式电机的转子结构 |
| JP2024507005A (ja) * | 2021-02-08 | 2024-02-15 | マグエレック プロパルション リミテッド | アキシアルフラックスモータ用ロータ及び製造方法 |
| FR3121295B1 (fr) * | 2021-03-24 | 2023-09-01 | Renault Sas | rotor pour machine électrique à flux axial, des procédés d’assemblage et de démontage d’un tel rotor |
| CN113300515B (zh) * | 2021-06-11 | 2022-11-15 | 山东大学 | 包含切向磁体结构的盘式轴向磁场永磁无刷电机结构及其方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007037210A (ja) * | 2005-07-22 | 2007-02-08 | Nissan Motor Co Ltd | 回転電機の回転子 |
| JP2007166828A (ja) * | 2005-12-15 | 2007-06-28 | Nissan Motor Co Ltd | 回転電機の磁石付き回転子コア及びその製造方法 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3909645A (en) * | 1974-07-10 | 1975-09-30 | Singer Co | Permanent magnet motor-tachometer having a single non-ferrous armature wound with two mutually-insulated windings each connected to a separate commutator |
| FR2279246A1 (fr) | 1974-07-19 | 1976-02-13 | Cem Comp Electro Mec | Perfectionnements a la construction de machines electriques tournantes |
| US4104552A (en) * | 1976-03-04 | 1978-08-01 | Merkle-Korff Gear Co. | Synchronous motor structure |
| IT1198556B (it) * | 1983-04-15 | 1988-12-21 | Giampiero Tassinario | Motore a corrente continua senza collettore a commutazione elettronica |
| US4587450A (en) * | 1984-01-06 | 1986-05-06 | Sanyei Corporation | Synchronous motor rotor |
| US4588914A (en) * | 1984-06-05 | 1986-05-13 | Westinghouse Electric Corp. | Permanent magnet rotor for high speed motors and generators |
| JPS6260451A (ja) | 1985-09-06 | 1987-03-17 | Nissan Motor Co Ltd | 永久磁石界磁デイスク型同期機 |
| JPS62213540A (ja) | 1986-03-14 | 1987-09-19 | Nissan Motor Co Ltd | 交流発電機 |
| JPH0349545A (ja) | 1989-07-17 | 1991-03-04 | Toyota Motor Corp | 永久磁石形同期モータ |
| US5063318A (en) * | 1989-08-25 | 1991-11-05 | Sundstrand Corporation | Preloaded permanent magnet rotor assembly |
| US4996457A (en) * | 1990-03-28 | 1991-02-26 | The United States Of America As Represented By The United States Department Of Energy | Ultra-high speed permanent magnet axial gap alternator with multiple stators |
| GB2275371A (en) | 1993-02-11 | 1994-08-24 | Westcombe International Limite | An electronically commutated electric motor |
| JPH07203645A (ja) * | 1993-12-30 | 1995-08-04 | Mabuchi Motor Co Ltd | 小型モータ及びその回転子の製造方法 |
| KR0160930B1 (ko) | 1996-01-06 | 1998-12-01 | 유환덕 | 전속도 무단변속기 |
| US6373162B1 (en) * | 1999-11-11 | 2002-04-16 | Ford Global Technologies, Inc. | Permanent magnet electric machine with flux control |
| JP4193685B2 (ja) * | 2003-12-15 | 2008-12-10 | 日産自動車株式会社 | アキシャルギャップモータ構造 |
| CN1314184C (zh) * | 2004-04-19 | 2007-05-02 | 台达电子工业股份有限公司 | 马达 |
| US7586232B2 (en) * | 2005-04-26 | 2009-09-08 | Industrial Design Laboratories, Inc | Flat radially interacting electric drive and a method of the manufacturing the same |
| JP4169055B2 (ja) | 2006-07-14 | 2008-10-22 | ダイキン工業株式会社 | 回転電機 |
| US8598761B2 (en) | 2007-05-03 | 2013-12-03 | In Motion Technologies Pty., Ltd. | Rotor magnet positioning device |
-
2008
- 2008-01-07 GB GBGB0800225.5A patent/GB0800225D0/en not_active Ceased
-
2009
- 2009-01-07 US US12/811,979 patent/US8624456B2/en active Active
- 2009-01-07 GB GB0900202A patent/GB2456067B/en active Active
- 2009-01-07 CN CN200980102183.5A patent/CN101919140B/zh active Active
- 2009-01-07 WO PCT/GB2009/000032 patent/WO2009087376A2/en active Application Filing
- 2009-01-07 EP EP09700730.6A patent/EP2243209B1/en active Active
- 2009-01-07 JP JP2010541100A patent/JP2011509064A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007037210A (ja) * | 2005-07-22 | 2007-02-08 | Nissan Motor Co Ltd | 回転電機の回転子 |
| JP2007166828A (ja) * | 2005-12-15 | 2007-06-28 | Nissan Motor Co Ltd | 回転電機の磁石付き回転子コア及びその製造方法 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017229136A (ja) * | 2016-06-21 | 2017-12-28 | アスモ株式会社 | アキシャルギャップモータ用ロータ及びアキシャルギャップモータ |
| US10862353B2 (en) | 2016-06-21 | 2020-12-08 | Denso Corporation | Axial gap motor rotor and axial gap motor |
| JP2020511923A (ja) * | 2017-03-22 | 2020-04-16 | ホワイロット エスアエス | メッシュ構造体に統合された複数の単位磁石を有する磁石構造体 |
| JP2022500976A (ja) * | 2018-09-24 | 2022-01-04 | ホワイロット | 磁石と、異なる方向の繊維を備えた複合材料層の本体を有する軸方向磁束ロータ |
| JP7399500B2 (ja) | 2018-09-24 | 2023-12-18 | ホワイロット | 磁石と、異なる方向の繊維を備えた複合材料層の本体を有する軸方向磁束ロータ、ロータの製造方法、およびロータを備える電磁モータまたは発電機 |
| WO2020255435A1 (ja) * | 2019-06-20 | 2020-12-24 | 株式会社日立産機システム | アキシャルギャップ型回転電機 |
| JP2021002914A (ja) * | 2019-06-20 | 2021-01-07 | 株式会社日立産機システム | アキシャルギャップ型回転電機 |
| CN113508511A (zh) * | 2019-06-20 | 2021-10-15 | 株式会社日立产机系统 | 轴向间隙型旋转电机 |
| JP7212587B2 (ja) | 2019-06-20 | 2023-01-25 | 株式会社日立産機システム | アキシャルギャップ型回転電機 |
| CN113508511B (zh) * | 2019-06-20 | 2023-09-19 | 株式会社日立产机系统 | 轴向间隙型旋转电机 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2243209A2 (en) | 2010-10-27 |
| WO2009087376A3 (en) | 2010-02-11 |
| US8624456B2 (en) | 2014-01-07 |
| GB2456067B (en) | 2011-05-11 |
| GB2456067A (en) | 2009-07-08 |
| US20110006631A1 (en) | 2011-01-13 |
| GB0900202D0 (en) | 2009-02-11 |
| WO2009087376A2 (en) | 2009-07-16 |
| GB0800225D0 (en) | 2008-02-13 |
| CN101919140B (zh) | 2013-02-13 |
| CN101919140A (zh) | 2010-12-15 |
| EP2243209B1 (en) | 2017-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011509064A (ja) | 電気機械用ロータ | |
| JP7095730B2 (ja) | 回転電機 | |
| US8022593B2 (en) | Electrical machine | |
| JP4709846B2 (ja) | 回転電機および車載回転電機システム | |
| KR101654392B1 (ko) | 전기 기계 - 모듈러 | |
| JP4729551B2 (ja) | アキシャルギャップ型モータ | |
| JP2007306751A (ja) | ステータの固定構造および車両 | |
| JP2019515616A (ja) | 回転電機用の固定子、及び回転電機 | |
| JP2017186006A (ja) | モータ及び電動車両 | |
| JP5954198B2 (ja) | 回転電機 | |
| WO2019003560A1 (ja) | 回転電機の固定子、及び回転電機 | |
| KR19980071159A (ko) | 차량용 싱글-휠 드라이브와 차량용 싱글-휠 드라이브에 사용되는 가로형-플럭스 장치 | |
| JP2008289244A (ja) | 回転電機の冷却構造 | |
| KR101331696B1 (ko) | 인휠시스템용 차륜구동장치 | |
| JP2012228020A (ja) | 回転電機のロータおよび回転電機 | |
| KR101938889B1 (ko) | 모터와 알터네이터를 융합한 전동차용 인휠 시스템 | |
| WO2019003559A1 (ja) | 回転電機のステータ、回転電機、及び回転電機のステータの製造方法 | |
| JP7402123B2 (ja) | 回転子、アキシャルギャップ型トランスバースフラックス式回転電機、及び組立方法 | |
| JP2009095089A (ja) | アキシャルギャップ型モータ | |
| KR20180115911A (ko) | 계자코일용 지지 및 냉각 부재를 포함하는 권선형 여자전동기 | |
| JP2018074830A (ja) | 回転電機のステータ | |
| KR101955029B1 (ko) | 모터와 알터네이터를 병렬로 융합한 전동차용 인휠시스템 | |
| CN117121348A (zh) | 电机 | |
| JP4482900B2 (ja) | アキシャルギャップ型モータ | |
| CN117121346A (zh) | 电机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111227 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111227 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20111227 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20120118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120214 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120514 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120521 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120614 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120621 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120709 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120809 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120911 |