JP2011167006A - ステッパモータの停止制御方法 - Google Patents
ステッパモータの停止制御方法 Download PDFInfo
- Publication number
- JP2011167006A JP2011167006A JP2010028983A JP2010028983A JP2011167006A JP 2011167006 A JP2011167006 A JP 2011167006A JP 2010028983 A JP2010028983 A JP 2010028983A JP 2010028983 A JP2010028983 A JP 2010028983A JP 2011167006 A JP2011167006 A JP 2011167006A
- Authority
- JP
- Japan
- Prior art keywords
- phase
- stop
- stepper motor
- rotor
- winding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 15
- 230000005284 excitation Effects 0.000 claims abstract description 50
- 238000001514 detection method Methods 0.000 claims description 3
- 238000004804 winding Methods 0.000 abstract description 53
- 230000000630 rising effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 239000000498 cooling water Substances 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 230000005281 excited state Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000010687 lubricating oil Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
Images


Landscapes
- Control Of Stepping Motors (AREA)
Abstract
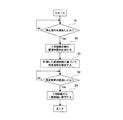
【解決手段】2相を同時に励磁して回転子を回転させ、停止位置に対応する1相を励磁して回転子の停止を行うステッパモータの停止制御方法において、ステッパモータへの停止信号を検知した時点で励磁している2相の励磁を所定期間維持し、その後は、停止のための1相以外の1相の励磁を停止する。
【選択図】図3
Description
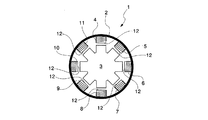
2…固定子
3…回転子
4…第1巻線
5…第2巻線
6…第3巻線
7…第4巻線
8…第5巻線
9…第6巻線
10…第7巻線
11…第8巻線
Claims (2)
- 2相を同時に励磁して回転子を回転させ、停止位置に対応する1相を励磁して回転子の停止を行うステッパモータの停止制御方法において、
ステッパモータへの停止信号を検知した時点で励磁している2相の励磁を所定期間維持し、
その後は、停止のための1相以外の1相の励磁を停止するステッパモータの停止制御方法。 - 所定期間は、停止信号の検知前における2相を励磁している間の経過時間に応じて設定する請求項1記載のステッパモータの停止制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010028983A JP2011167006A (ja) | 2010-02-12 | 2010-02-12 | ステッパモータの停止制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010028983A JP2011167006A (ja) | 2010-02-12 | 2010-02-12 | ステッパモータの停止制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011167006A true JP2011167006A (ja) | 2011-08-25 |
Family
ID=44596992
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010028983A Pending JP2011167006A (ja) | 2010-02-12 | 2010-02-12 | ステッパモータの停止制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011167006A (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58179200A (ja) * | 1982-04-09 | 1983-10-20 | Seiko Epson Corp | ステツピングモ−タ駆動方式 |
| JPS6395898A (ja) * | 1986-10-08 | 1988-04-26 | Fuji Electric Co Ltd | パルスモ−タの駆動回路 |
| JPH0276000U (ja) * | 1988-11-30 | 1990-06-11 |
-
2010
- 2010-02-12 JP JP2010028983A patent/JP2011167006A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58179200A (ja) * | 1982-04-09 | 1983-10-20 | Seiko Epson Corp | ステツピングモ−タ駆動方式 |
| JPS6395898A (ja) * | 1986-10-08 | 1988-04-26 | Fuji Electric Co Ltd | パルスモ−タの駆動回路 |
| JPH0276000U (ja) * | 1988-11-30 | 1990-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101854144B (zh) | 用于检测失步情况的方法 | |
| JP5952502B2 (ja) | 3相ブラシレスモータの駆動装置 | |
| JP5648854B2 (ja) | モータ制御装置 | |
| JP2009189176A (ja) | 同期電動機の駆動システム | |
| JP2014113057A (ja) | ブラシレスモータの制御装置及び始動方法 | |
| JP2014128070A (ja) | モータ制御装置及びステッピングモータの制御方法 | |
| JP2014143775A (ja) | モータ制御装置及びモータの制御方法 | |
| JP6332056B2 (ja) | モータ制御装置 | |
| JP6585651B2 (ja) | モータ制御装置及びステッピングモータの制御方法 | |
| JP5936883B2 (ja) | モータ制御装置及びステッピングモータの脱調状態判定方法 | |
| JP2011167006A (ja) | ステッパモータの停止制御方法 | |
| JP5598444B2 (ja) | 電動バルブタイミング可変装置 | |
| JP5472044B2 (ja) | モータ制御装置 | |
| JP2017161455A (ja) | 制御装置 | |
| JP2006271127A (ja) | ステッピングモータの停止制御方法 | |
| WO2008084500A2 (en) | A method for noise reduction in stepper motors during homing and system thereof | |
| JP6150647B2 (ja) | ブラシレスモータの制御装置 | |
| JP2012097600A (ja) | エンジン始動装置 | |
| JP6459886B2 (ja) | 電動バルブタイミング制御装置 | |
| CN106464167A (zh) | 电动机加速方法 | |
| JP5968738B2 (ja) | ブラシレスモータの制御装置 | |
| CN103344261B (zh) | 汽车仪表指针的惯性归零方法 | |
| JP6365334B2 (ja) | モータ制御装置 | |
| JP2001245494A (ja) | ステッピングモータの制御装置及び制御方法 | |
| JPH0670586A (ja) | センサレスブラシレスモータの駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130129 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20130327 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130327 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140204 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140603 |