JP2011136838A - 巻上機 - Google Patents
巻上機 Download PDFInfo
- Publication number
- JP2011136838A JP2011136838A JP2010000241A JP2010000241A JP2011136838A JP 2011136838 A JP2011136838 A JP 2011136838A JP 2010000241 A JP2010000241 A JP 2010000241A JP 2010000241 A JP2010000241 A JP 2010000241A JP 2011136838 A JP2011136838 A JP 2011136838A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- hoisting
- regenerative
- switch
- power storage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images



Landscapes
- Elevator Control (AREA)
- Control And Safety Of Cranes (AREA)
Abstract
【課題】巻き下げ動作で生じる回生エネルギーを巻き上げ動作に利用することにより、回生エネルギーおよび回生エネルギーを処理する回路等を有効利用することのできる巻上機を得る。
【解決手段】本発明に係る巻上機は、モータが巻き下げ動作を行なうときに生じる回生電力を蓄電する装置を備えている。
【選択図】図3
【解決手段】本発明に係る巻上機は、モータが巻き下げ動作を行なうときに生じる回生電力を蓄電する装置を備えている。
【選択図】図3
Description
本発明は、巻上機に関するものである。
巻上機は、重い荷物をモータによって上方に巻き上げる装置である。巻上機の動作は、巻き上げ以外にも、荷物を上方から下方へ巻き下げる動作がある。このとき、鉛直下方向(巻き下げ方向)にL(m)移動する質量m(kg)の荷物は、重力加速度をg(m/s2)とすると、m×g×L(J)の重力による位置エネルギーを失う。このエネルギーは、モータから生じる回生エネルギーとなる。
例えば、モータを制御するためインバータを用いている場合、この回生エネルギーが素子の過電流などを引き起こし、故障の原因となる。そのため、回生エネルギーを処理する仕組みが必要である。
従来のインバータを用いた巻上機では、回生エネルギーを抵抗器などに供給し、ジュール熱に変換して消費させる手法が用いられている。その他、下記特許文献1では、回生エネルギーをコンバータによって交流に変換し、電源側に交流帰還させている。
従来のインバータを用いた巻上機では、巻き下げ動作で発生する回生エネルギーを消費するため、巻上機本来の動作とは関係のない抵抗器などの装置が必要となっていた。上記特許文献1においても同様に、本来の動作のために必要な回路構成とは別に、回生エネルギーを処理するためのコンバータが別途必要となる。
このような、本来の動作のために必要な回路構成とは別に回生エネルギーを処理するための装置等を有する構成は、巻上機の構成上非効率であるのみならず、回生エネルギーを有効利用できていない点で、巻上機の省エネルギー化の観点から課題がある。
本発明は、上記のような課題を解決するためになされたものであり、巻き下げ動作で生じる回生エネルギーを巻き上げ動作に利用することにより、回生エネルギーおよび回生エネルギーを処理する回路等を有効利用することのできる巻上機を得ることを目的とする。
本発明に係る巻上機は、モータが巻き下げ動作を行なうときに生じる回生電力を蓄電する装置を備えている。
本発明に係る巻上機によれば、モータが巻き下げ動作を行なうときに生じる回生電力を貯めておき、巻上機本来の動作である巻き上げ動作を行なうときに貯めた電力を用いることができる。これにより、回生エネルギーおよびこれを処理するための回路等を有効利用して省エネルギー化を図ることができる。
<実施の形態1>
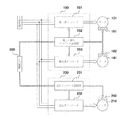
図1は、本発明の実施の形態1に係るクレーン装置1000の構成図である。クレーン装置100は、重い荷物を吊り上げて縦横に移動させる装置であり、巻上機100、走行用装置200、入力装置300を備える。
図1は、本発明の実施の形態1に係るクレーン装置1000の構成図である。クレーン装置100は、重い荷物を吊り上げて縦横に移動させる装置であり、巻上機100、走行用装置200、入力装置300を備える。
巻上機100は、荷物を図1のz軸方向に巻き上げ、巻き上げた荷物を図1のx軸方向に移動させる装置であり、クレーンフック110、ワイヤロープ120、巻上用装置130、横行用装置140、巻上横行インバータ装置150を備える。
クレーンフック110は、巻き上げる荷物を取り付ける部材である。クレーンフック110に荷物を取り付けてワイヤロープ120を巻上用装置130で巻き取ることにより、荷物を図1のz軸方向に巻き上げ、または巻き下げる。
巻上用装置130は、巻上用モータ131を用いてワイヤロープ120を巻き上げ、または巻き下げる装置である。横行用装置140は、横行用モータ141を用いて巻上機100を後述の横行用ガーダー220に沿って図1のx軸方向に移動させる装置である。
巻上横行インバータ装置150は、後述の図2で説明する巻上用インバータ151と横行用インバータ153を制御し、巻上用モータ131と横行用モータ141を駆動して上記動作を実行する。
走行用装置200は、図1のy軸方向に巻上機100を移動させる装置であり、走行用モータ210、横行用ガーダー220、走行用インバータ装置230、走行用ガーダー240を備える。
走行用モータ210は、走行用装置200を走行用ガーダー240に沿って図1のy軸方向に移動させる。走行用インバータ装置230は、後述の図2で説明する走行用インバータ232を制御し、走行用モータ210を駆動して上記動作を実行する。
図2は、巻上横行インバータ装置150と走行用インバータ装置230の機能ブロック図である。以下、各装置の構成について説明する。
巻上横行インバータ装置150は、巻上用インバータ151、巻上・横行用インバータ制御部152、横行用インバータ153を備える。
巻上用インバータ151は、巻上用モータ131に周波数可変の交流電圧を印加して巻上用モータ131を所望の運転速度で駆動する。横行用インバータ153は、同様に横行用モータ141に周波数可変の交流電圧を印加して横行用モータ141を所望の運転速度で駆動する。
巻上・横行用インバータ制御部152は、巻上用インバータ151と横行用インバータ153の動作を制御することにより、巻上用モータ131と横行用モータ141を駆動制御する。また、巻上・横行用インバータ制御部152は、モータブレーキ161を稼動させ、または解除する。これにより、クレーンフック110に取り付けられている荷物を自由落下させることなく、安全にz軸方向に移動させることができる。同様に、モータブレーキ162を稼動させ、または解除することにより、巻上機100を安全にx軸方向に移動させることができる。
巻上・横行用インバータ制御部152は、その機能を実現する回路デバイスのようなハードウェアを用いて構成することもできるし、マイコンやCPU(Central Processing Unit)のような演算装置とその動作を規定するソフトウェアを用いて構成することもできる。
走行用インバータ装置230は、走行インバータ制御部231、走行用インバータ232を備える。
走行用インバータ232は、走行用モータ210に周波数可変の交流電圧を印加して走行用モータ210を駆動する。
走行インバータ制御部231は、走行用インバータ232の動作を制御することにより走行用モータ210を所望の運転速度で駆動する。また、モータブレーキ250を稼動させ、または解除することにより、走行用装置200を安全にy軸方向に移動させることができる。
走行インバータ制御部231は、その機能を実現する回路デバイスのようなハードウェアを用いて構成することもできるし、マイコンやCPUのような演算装置とその動作を規定するソフトウェアを用いて構成することもできる。
入力装置300は、巻上・横行用インバータ制御部152と走行インバータ制御部231に対して操作指令を出力する。巻上・横行用インバータ制御部152と走行インバータ制御部231は、この操作指令に基づき各インバータを制御し、これにより各モータを駆動制御して所望の動作を実行する。
図3は、巻上用インバータ151の回路図である。巻上用インバータ151は、整流部31、整流コンデンサ32、駆動素子部33、回生駆動スイッチ34、回生抵抗35、蓄電部36、負荷判別部37、スイッチSWr38、スイッチSWc39、電圧モニタ部40を備える。
整流部31と整流コンデンサ32は、3相交流電力を直流に変換する。駆動素子部33は、スイッチング素子などを用いて直流を交流に変換し、所望の周波数の交流電力を出力するインバータとして構成されている。
巻上・横行インバータ制御部152は、入力装置300から受け取った操作指令に基づき、インバータ駆動制御信号を駆動素子部33に出力する。駆動素子部33は、インバータ駆動制御信号に基づき、巻上用モータ131を所望の速度と回転力で駆動させるための交流電圧を、巻上用モータ131に印加する。巻上用モータ131は、印加された交流電圧によって駆動し、ワイヤロープ120を巻上ドラム132によって巻き上げ、または巻き下げて、荷物を所望の速度で上下に移動させる。
蓄電部36は、例えばキャパシタなどを用いて構成され、巻上用モータ131が巻き下げ動作を行なうときに生じる回生エネルギーを電気エネルギーとして蓄電する機能を有する。巻上・横行インバータ制御部152は、スイッチSWc39をON/OFFすることにより、蓄電部36と駆動素子部33の間の接続を切り替える。回生エネルギーを蓄電するときはスイッチSWc39をONにし、蓄電しないときはOFFにする。また、蓄電部36が蓄電している電気エネルギーを放出するときは、スイッチSWc39をONにして蓄電部36を駆動素子部33に接続する。
蓄電部36の具体的な構成として、例えば大容量、高速充電、放電が可能な電気二重層キャパシタを用いることが考えられる。その他の蓄電機能を有するデバイス等を用いることもできる。ただし、蓄電容量、充放電するための時間などの仕様を、巻上機100が実際に持ち上げる荷物の重量、巻き下げ動作時に発生する回生エネルギーの量などに合わせて調整する必要がある。
回生抵抗35は、蓄電部36が回生エネルギーを蓄電しないとき、回生エネルギーを熱エネルギーとして消費させるための電気抵抗である。巻上・横行インバータ制御部152は、スイッチSWr38と回生駆動スイッチ34をON/OFFすることにより、回生抵抗35と駆動素子部33の間の接続を切り替える。回生エネルギーを消費させるときはスイッチSWr38と回生駆動スイッチ34をONにし、消費させないときは少なくともいずれか一方をOFFにする。スイッチSWr38と回生駆動スイッチ34は、いずれか一方を設けずに省略してもよい。
負荷判別部37は、クレーンフック110に取り付けられている荷物の重量を判別し、その判別結果を巻上・横行インバータ制御部152に出力する。荷物の重量を判別する手法には、任意の公知技術を用いることができる。また、負荷判別部37は例えば電流などの検出値のみを巻上・横行インバータ制御部152に出力し、実際に荷物の重量を算出する処理は巻上・横行インバータ制御部152が実行するようにしてもよい。
電圧モニタ部40は、直流母線間電圧Vpnを監視し、その測定値を巻上・横行インバータ制御部152に出力する。
本発明における「第1スイッチ」は、スイッチSWc39が相当する。「第2スイッチ」は、スイッチSWr38が相当する。「第3スイッチ」は、回生駆動スイッチ34が相当する。
以上、クレーン装置1000および巻上機100の構成を説明した。なお、図3では蓄電部36と回生抵抗35を双方備える構成を説明したが、蓄電部36の蓄電容量が必要とされる容量を満たし、充放電に要する時間が十分に短ければ、回生抵抗35、スイッチSWr38、回生駆動スイッチ34を設けなくともよい。
以上のように、本実施の形態1に係る巻上機100は、巻上用モータ131が巻き下げ動作を行なうときに生じる回生エネルギーを蓄電する蓄電部36を備える。これにより、回生エネルギーを全て消費させることなく貯めておき、後に巻き上げ動作を行なうときなどのエネルギー源として貯めておいた電気エネルギーを用いることができる。すなわち、回生エネルギーを有効利用することができるので、巻上機100の省エネルギー化の観点から好ましい。
また、本実施の形態1において、巻上・横行インバータ制御部152は、スイッチSWc39をON/OFFすることにより、蓄電部36に回生エネルギーを蓄電させるか否かを切り替えることができる。これにより、蓄電部36の充電容量に合った最適な充電時間で回生エネルギーを蓄電することができる。
<実施の形態2>
本発明の実施の形態2では、巻上機100の動作を、巻上用モータ131の巻き下げ動作によって生じる回生エネルギーの観点から詳細に検討する。また、蓄電部36が必要とする容量についても併せて検討する。なお、各機器の構成は実施の形態1と同様である。
本発明の実施の形態2では、巻上機100の動作を、巻上用モータ131の巻き下げ動作によって生じる回生エネルギーの観点から詳細に検討する。また、蓄電部36が必要とする容量についても併せて検討する。なお、各機器の構成は実施の形態1と同様である。
図4は、巻上用モータ131の動作過程を示すタイムチャートである。以下では、図4の各期間で生じる回生エネルギーおよび巻き上げ動作に必要となるエネルギーについて検討する。
(1)巻き下げ動作によって生じる回生エネルギー
巻下方向に荷物(質量m)が移動すると、重力の位置エネルギーの減少分に相当する巻上用モータ131において回生エネルギーEkとして生じる。スイッチSWc39をONにすると、回生エネルギーEkが蓄電部36に電荷として充電される。この充電エネルギーは、次の巻上動作に必要なエネルギー源として用いることができる。以下では、このメカニズムについて説明する。
巻下方向に荷物(質量m)が移動すると、重力の位置エネルギーの減少分に相当する巻上用モータ131において回生エネルギーEkとして生じる。スイッチSWc39をONにすると、回生エネルギーEkが蓄電部36に電荷として充電される。この充電エネルギーは、次の巻上動作に必要なエネルギー源として用いることができる。以下では、このメカニズムについて説明する。
図3の右下に示すように、質量m(kg)の荷物が静止状態から距離L(m)巻下方向に速度v(m/s)で移動したとき、重力加速度をg(m/s2)とすれば、力学的エネルギー保存則により下記(式1)が成立する。

上記(式1)の右辺の第1項Ekは重力による位置エネルギーの変化で生じる回生エネルギー(J)の総量を表し、第2項は質量m(kg)の運動エネルギー(J)を表す。
生じた回生エネルギーEk(J)は、蓄電部36に充電される充電エネルギーEα(J)、機械損を含む巻上用モータ131の効率損失(J)、駆動素子部33の熱損(J)などの消費エネルギーEβ(J)、および、回生抵抗35による熱損Eγ(J)に分解される。これにより、下記(式2)が得られる。
蓄電部36へ回生エネルギーを充電している期間では、巻上・横行インバータ制御部152はスイッチSWr38をOFFにする。これにより、回生抵抗35への電流経路が遮断され、回生抵抗35が回生エネルギーを熱エネルギーとして消費することはない。すなわち、蓄電部36へ回生エネルギーを充電している期間では、Eγ=0(J)となる。
したがって、蓄電部36へ回生エネルギーを充電している期間では、上記(式2)に基づき下記(式3)が導かれる。
定格質量M(kg)の荷物を定格速度v0(m/s)で時間tR(s)だけ巻き下げて距離Ld(m)移動させると、上記(式1)(式3)より、下記(式4)が成立する。蓄電部36の蓄電容量は、下記(式4)のEα(J)に基づき定めることができる。
(2)巻上加速期間で必要となるエネルギー
巻上用モータ131の巻上動作において、定格質量M(kg)の荷物を静止状態から速度v0(m/s)に至るまで加速する時に必要となる巻上加速エネルギーEa(J)は、加速期間中の移動距離をLa(m)とすると、下記(式5)により得られる。
巻上用モータ131の巻上動作において、定格質量M(kg)の荷物を静止状態から速度v0(m/s)に至るまで加速する時に必要となる巻上加速エネルギーEa(J)は、加速期間中の移動距離をLa(m)とすると、下記(式5)により得られる。
加速期間の時間をta(s)とし、加速度が加速期間中で一定であるとすると、移動距離La(m)は下記(式6)によって得られる。
巻上加速期間(t≦ta)において必要となるエネルギーを蓄電部36に蓄電されている電気エネルギーによって補うために必要な充電エネルギーEa(J)は、蓄電部36の充電容量をC(F)、回生電圧をVpnとすると、上記(式5)(式6)より、下記(式7)で算出することができる。
蓄電部36に必要な充電容量C(F)は、上記(式7)より、下記(式8)となる。
例えば、定格質量M=3000(kg)、巻上加速時間ta=2(s)、定格巻上速度v0=0.15(m/s)、回生電圧Vpn=370(V)、重力加速度g=9.8(m/s2)とすると、(式8)よりC=0.045(F)となる。蓄電部36の充電容量は、この値を満たすようにすればよい。
(3)巻上加速期間と定格速度巻上期間に必要となるエネルギーの合計
巻き上げ時の加速動作が完了し、定格速度v0(m/s)で荷物を巻き上げる距離をLu(m)、巻上動作時間をtu(s)とする。この期間(ta<t≦ta+tu)の巻上動作に必要な巻上エネルギーEu(J)およびLu(m)は、それぞれ下記(式9)(式10)で表される。
巻き上げ時の加速動作が完了し、定格速度v0(m/s)で荷物を巻き上げる距離をLu(m)、巻上動作時間をtu(s)とする。この期間(ta<t≦ta+tu)の巻上動作に必要な巻上エネルギーEu(J)およびLu(m)は、それぞれ下記(式9)(式10)で表される。
巻上加速期間(t≦ta)および定格速度巻き上げ期間(ta<t≦ta+tu)において必要となるエネルギーを蓄電部36に蓄電されている電気エネルギーによって補うため蓄電部36が必要とする充電容量C(F)は、(式7)(式9)(式10)より、下記(式11)となる。
定格質量M=3000(kg)、巻上加速時間ta=2(s)、定格巻上速度v0=0.15(m/s)、回生電圧Vpn=370(V)、定格速度巻上時間tu=10(s)、重力加速度g=9.8(m/s2)とすると、(式11)よりC=0.71(F)となる。蓄電部36の充電容量は、この値を満たすようにすればよい。
巻上加速期間(t≦ta)と定格速度巻上期間(ta<t≦ta+tu)の双方において必要となるエネルギーを、蓄電部36が蓄電している電気エネルギーのみによって補おうとすると、蓄電部36の充電容量Cが大きくなり、部品コストが大幅に高くなる可能性がある。そこで、例えば巻上加速期間(t≦ta)において必要となるエネルギーのみ蓄電部36を用いて補うなどして、蓄電部36の充電容量Cを調整してもよい。
このとき、蓄電部36の充電容量Cは比較的小さくなるので、回生エネルギーを全て充電することができない可能性がある。その場合は、回生抵抗35を併用し、蓄電部36が充電しきれない分を熱エネルギーとして消費させるとよい。
以上、本実施の形態2では、巻上用モータ131の巻き下げ動作によって生じる回生エネルギーおよび蓄電部36が必要とする容量について説明した。
<実施の形態3>
本発明の実施の形態3では、巻上用モータ131の巻き下げ動作期間において生じる回生エネルギーを蓄電部36が充電する際の充電時間について検討する。なお、各機器の構成は実施の形態1と同様である。
本発明の実施の形態3では、巻上用モータ131の巻き下げ動作期間において生じる回生エネルギーを蓄電部36が充電する際の充電時間について検討する。なお、各機器の構成は実施の形態1と同様である。
一般に、巻上機100を用いて巻き下げる荷物は毎回異なる場合がある。そのため、巻き下げ時に生じる回生エネルギーを蓄電部36に充電させる量を各回で等しく維持するためには、巻き下げる荷物の質量差を考慮に入れて、必要な充電時間を検討しなければならない。同様に、巻き下げ速度の差も考慮に入れる必要がある。以下、その検討過程を説明する。
質量m(kg)の荷物が速度v(m/s)でLd’(m)の距離を巻下方向に移動する場合、移動時間をtd(s)とすれば、生じる回生エネルギーEd(J)は、上記(式4)より、下記(式12)となる。
このとき蓄電部36に充電される充電エネルギーEd(J)は、下記(式13)で表される。
質量m(kg)の荷物を巻き下げた場合において、定格質量Mの荷物を巻き下げた場合の充電エネルギーEαと等しい充電エネルギーを得るために必要な充電時間tdは、上記(式4)(式12)(式13)より、下記(式14)で算出することができる。
蓄電部36の充電容量C(F)は、(式8)または(式11)いずれかで算出される値から選択することができる。
例えば、荷物質量m=M=3000(kg)、巻下速度v=v0=0.15(m/s)、回生電圧Vpn=370(V)、C=0.045(F)、重力加速度g=9.8(m/s2)とすると、td≒0.7(s)となる。同様に、荷物質量m=M/2=1500(kg)、巻下速度v=v0/2=0.075(m/s)とした場合、td≒2.8(s)となる。 回生エネルギーを蓄電部36に充電する時間tdは、以上の手順によって求められる。
以上、本実施の形態3では、巻上用モータ131の巻き下げ動作期間において生じる回生エネルギーを蓄電部36が充電する際の充電時間について説明した。
<実施の形態4>
本発明の実施の形態4では、実施の形態2〜3で説明した事項に基づき、巻上・横行インバータ制御部152が各スイッチを切り替える動作を説明する。各機器の構成は、実施の形態1と同様である。
本発明の実施の形態4では、実施の形態2〜3で説明した事項に基づき、巻上・横行インバータ制御部152が各スイッチを切り替える動作を説明する。各機器の構成は、実施の形態1と同様である。
巻上・横行インバータ制御部152は、負荷判定部37より荷物質量mを取得し、駆動素子部33が出力する交流電圧の周波数などに基づき巻下速度vを取得し、さらには電圧モニタ部40からVpnを取得して、上記演算式を用いて充電時間tdを算出する。
巻上・横行インバータ制御部152は、巻上用モータ131が巻き下げ動作を行なうときは、充電時間tdの間だけスイッチSWc39をONにし、蓄電部36に回生エネルギーを充電させる。
巻上・横行インバータ制御部152は、蓄電部36の充電が完了すると、スイッチSWc39をOFFにするとともにスイッチSWr38をONにし、回生抵抗35をいつでも接続できるようにしておく。
回生エネルギーによって直流母線電圧Vpnが上昇して整流コンデンサ32に過電圧が印加されると、巻上用インバータ151が破損してしまう。そこで巻上・横行インバータ制御部152は、電圧モニタ部40の検出値を監視し、直流母線電圧Vpnが所定の閾値まで上昇した時点で、回生駆動スイッチ34をONにする。以後は、回生エネルギーは回生抵抗35で熱エネルギーとして消費され、直流母線間電圧Vpnは降下する。これにより、巻上用インバータ151の過電圧破損を防ぐことができる。
なお、巻上・横行インバータ制御部152は、より安全に巻上用インバータ151を動作させるため、蓄電部36の充電が完了した時点で、スイッチSWr38と回生駆動スイッチ34をともにONにしてもよい。
<実施の形態5>
実施の形態2〜4では、巻上加速期間(t≦ta)または定格速度巻上期間(ta<t≦tu)において必要となるエネルギーを、一定速度vで巻き下げるときに生じる回生エネルギーで補うことを説明した。本発明の実施の形態5では、加速巻下期間および減速巻下期間について説明する。
実施の形態2〜4では、巻上加速期間(t≦ta)または定格速度巻上期間(ta<t≦tu)において必要となるエネルギーを、一定速度vで巻き下げるときに生じる回生エネルギーで補うことを説明した。本発明の実施の形態5では、加速巻下期間および減速巻下期間について説明する。
図4の「巻下動作」期間では、一定速度vで荷物を巻き下げる期間の前後で、加速巻下期間および減速巻下期間が存在する。加速巻下期間は、荷物が静止している状態から、巻下速度が一定速度vに達するまでの期間である。減速巻下期間は、一定速度vで荷物を巻き下げている状態から、荷物を静止させるまでの期間である。
減速巻下期間があまりにも長いと、オペレータが荷物の巻き下げを停止するよう指示してから実際に荷物が静止するまでの時間が長くなり、荷物が地面などに衝突する可能性があるため、危険である。そこで、減速巻下期間は例えば0.5(s)程度の短い時間に設定されることが望ましい。
これに起因して、減速巻下期間では、巻上用モータ131の出力を大きくしてトルクを上げる必要がある。そのため、短い時間に大きな回生エネルギーが生じることになるので、過電圧が生じやすいといえる。
そこで、巻上・横行インバータ制御部152は、減速巻下期間では常にスイッチSWr38と回生駆動スイッチ34をともにONにし、回生エネルギーが回生抵抗35で確実に消費されるようにしてもよい。
減速巻下期間と比較して、加速巻下期間に対する時間的制約は比較的緩いため、例えば加速巻下期間を長めに確保することにより、急激な電圧上昇を防ぐことができる。
また、以上の実施の形態2〜4では、一定速度vで巻き下げるときに生じる回生エネルギーを蓄電部36に充電させることを説明したが、加速巻下期間または減速巻下期間で生じる回生エネルギーを充電させてもよい。
<実施の形態6>
以上の実施の形態1〜5で説明した、回生エネルギーを蓄電部36に充電させて有効利用する手法は、走行用モータ210をモータブレーキ250で停止させるときに生じる回生エネルギーなどについても同様に適用することができる。
以上の実施の形態1〜5で説明した、回生エネルギーを蓄電部36に充電させて有効利用する手法は、走行用モータ210をモータブレーキ250で停止させるときに生じる回生エネルギーなどについても同様に適用することができる。
ただし、走行用装置200は、オペレータが入力装置300を用いて走行用装置200を停止させるよう指示してから実際に停止するまでの時間間隔に対する制約が緩いため、巻上機100と比較して回生エネルギーはあまり生じない。そのため回生エネルギーを有効利用する観点からは、大きな効果は得にくいといえる。
100:巻上機、110:クレーンフック、120:ワイヤロープ、130:巻上用装置、131:巻上用モータ、132:巻上ドラム、140:横行用装置、141:横行用モータ、150:巻上横行インバータ装置、151:巻上用インバータ、152:巻上・横行用インバータ制御部、153:横行用インバータ、161〜162:モータブレーキ、200:走行用装置、210:走行用モータ、220:横行用ガーダー、230:走行用インバータ装置、231:走行インバータ制御部、232:走行用インバータ、240:走行用ガーダー、250:モータブレーキ、300:入力装置、31:整流部、32:整流コンデンサ、33:駆動素子部、34:回生駆動スイッチ、35:回生抵抗、36:蓄電部、37:負荷判別部、38:スイッチSwr、39:スイッチSWc、40:電圧モニタ部、1000:クレーン装置。
Claims (7)
- 荷物の巻上と巻下を行う巻上機であって、
巻上動作と巻下動作を行なうモータと、
前記モータが巻下動作を行なうときに生じる回生電力を蓄電する蓄電装置と、
を備えたことを特徴とする巻上機。 - 前記蓄電装置と前記モータを接続するか否かを切り替える第1スイッチと、
前記第1スイッチを制御する制御部と、
を備えたことを特徴とする請求項1記載の巻上機。 - 前記制御部は、
前記モータが前記巻上動作を行なう期間のうち前記モータを加速する期間において、
前記第1スイッチをONにして前記蓄電装置と前記モータを接続し前記蓄電装置が蓄積している電力を前記モータに供給する
ことを特徴とする請求項2記載の巻上機。 - 前記蓄電装置は、
前記モータが前記巻上動作を行なう期間のうち前記モータを加速する期間において前記モータが必要とする電力を蓄積することができる容量を有し、
前記制御部は、
前記モータが巻下動作を行なうとき前記第1スイッチをONにして前記回生電力を前記蓄電装置に蓄積する
ことを特徴とする請求項3記載の巻上機。 - 前記モータが巻下動作を行なうときに生じる回生電力を消費する回生抵抗を備えた
ことを特徴とする請求項1から請求項4のいずれか1項に記載の巻上機。 - 前記回生抵抗と前記モータを接続するか否かを切り替える第2スイッチを備え、
前記制御部は、
前記回生電力が前記蓄電装置の容量を超えて生じるときは、
前記第2スイッチをONにして余剰の前記回生電力を前記回生抵抗で消費させる
ことを特徴とする請求項5記載の巻上機。 - 前記モータを駆動するインバータと、
前記第2スイッチがONになっている状態で前記回生抵抗を前記モータに接続するか否かをさらに切り替える第3スイッチと、
前記インバータの直流母線間電圧を検出する電圧モニタ部と、
を備え、
前記制御部は、
前記回生電力が前記蓄電装置の容量を超えて生じるときは、
前記第2スイッチをONにするとともに前記第3スイッチをOFFにして前記回生抵抗を前記モータから切断しておき、
前記直流母線間電圧が所定閾値以上となった時点で前記第3スイッチをONにして余剰の前記回生電力を前記回生抵抗で消費させる
ことを特徴とする請求項6記載の巻上機。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010000241A JP2011136838A (ja) | 2010-01-04 | 2010-01-04 | 巻上機 |
| CN2011100038611A CN102115015A (zh) | 2010-01-04 | 2011-01-04 | 卷扬机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010000241A JP2011136838A (ja) | 2010-01-04 | 2010-01-04 | 巻上機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011136838A true JP2011136838A (ja) | 2011-07-14 |
Family
ID=44213963
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010000241A Abandoned JP2011136838A (ja) | 2010-01-04 | 2010-01-04 | 巻上機 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2011136838A (ja) |
| CN (1) | CN102115015A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013110783A (ja) * | 2011-11-17 | 2013-06-06 | Mitsubishi Heavy Industries Machinery Technology Corp | 電力供給装置及び供給電力制御方法 |
| JP2014025517A (ja) * | 2012-07-26 | 2014-02-06 | Shinko Engineering Co Ltd | ブレーキ付電動機 |
| JP2014043354A (ja) * | 2006-10-25 | 2014-03-13 | Yaskawa Electric Corp | クレーン装置及びその制御方法 |
| KR101615972B1 (ko) * | 2016-02-04 | 2016-04-28 | 남상규 | 회생 에너지의 활용이 가능한 컴팩트 타입 호이스트 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5848975B2 (ja) * | 2012-01-20 | 2016-01-27 | 株式会社日立産機システム | 電動巻上機およびその制御方法 |
| CN104210982B (zh) * | 2014-08-22 | 2016-05-25 | 上海吉亿电机有限公司 | 一种电梯抱闸控制系统及控制方法 |
| JP6623112B2 (ja) * | 2016-04-15 | 2019-12-18 | 株式会社日立産機システム | 巻上機および巻上機の制御方法 |
| CN111224588B (zh) * | 2020-01-07 | 2023-06-27 | 深圳市显控科技股份有限公司 | 伺服驱动器再生控制方法、系统、设备及存储介质 |
| CN114772493A (zh) * | 2022-03-15 | 2022-07-22 | 浙江三一装备有限公司 | 卷扬系统的管控方法、系统及作业机械 |
| CN116374869A (zh) * | 2023-03-28 | 2023-07-04 | 北京航天发射技术研究所 | 一种起竖电驱系统及发射台架 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7165654B2 (en) * | 2004-02-06 | 2007-01-23 | Paceco Corp | Energy storage method for load hoisting machinery |
| JP2005324886A (ja) * | 2004-05-12 | 2005-11-24 | Toshiba Elevator Co Ltd | ハイブリッド駆動型エレベータの制御装置 |
| JP4787539B2 (ja) * | 2005-05-20 | 2011-10-05 | 株式会社Ihi | 負荷駆動装置 |
| CN1945963A (zh) * | 2006-09-01 | 2007-04-11 | 罗中柱 | 直流母线供电的起重机动力系统 |
-
2010
- 2010-01-04 JP JP2010000241A patent/JP2011136838A/ja not_active Abandoned
-
2011
- 2011-01-04 CN CN2011100038611A patent/CN102115015A/zh active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014043354A (ja) * | 2006-10-25 | 2014-03-13 | Yaskawa Electric Corp | クレーン装置及びその制御方法 |
| JP2013110783A (ja) * | 2011-11-17 | 2013-06-06 | Mitsubishi Heavy Industries Machinery Technology Corp | 電力供給装置及び供給電力制御方法 |
| JP2014025517A (ja) * | 2012-07-26 | 2014-02-06 | Shinko Engineering Co Ltd | ブレーキ付電動機 |
| KR101615972B1 (ko) * | 2016-02-04 | 2016-04-28 | 남상규 | 회생 에너지의 활용이 가능한 컴팩트 타입 호이스트 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102115015A (zh) | 2011-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011136838A (ja) | 巻上機 | |
| JP5240685B2 (ja) | エレベータ | |
| JP5800159B2 (ja) | クレーン装置及びその制御方法 | |
| JP2009242088A (ja) | クレーン装置 | |
| JP4698644B2 (ja) | クレーン装置 | |
| JP2012500166A (ja) | エレベータの電力システムにおける複数の供給源からの電力の管理 | |
| CN102714424B (zh) | 电力供给装置、起重机及电力供给方法 | |
| JP2012500164A (ja) | エレベータドライブの線電流およびエネルギ貯蔵の制御 | |
| JP5241367B2 (ja) | 電動巻上機 | |
| JP2011068499A (ja) | クレーン装置 | |
| JP2020158286A (ja) | エレベーター電力供給システム及びエレベーター電力供給方法 | |
| JP5410728B2 (ja) | クレーン装置およびクレーン装置の制御方法 | |
| JP2012071903A (ja) | ハイブリッド式駆動装置、クレーン制御装置、及びクレーン装置 | |
| JP5805297B2 (ja) | エレベータ装置 | |
| CN103596868A (zh) | 电梯的控制装置 | |
| JP2012012149A (ja) | クレーン制御装置、及びクレーン装置 | |
| EP4242157A2 (en) | Automatic rescue and charging system for elevator drive | |
| JP5839873B2 (ja) | ハイブリッド駆動型エレベータの制御装置 | |
| JP5501594B2 (ja) | クレーン装置およびクレーン装置の制御方法 | |
| JP5277115B2 (ja) | 駐車装置 | |
| JP5935301B2 (ja) | 電力供給装置及び供給電力制御方法 | |
| JP2005102410A (ja) | エレベータの制御装置 | |
| JP2014009041A (ja) | エレベーター制御装置 | |
| JP5622211B2 (ja) | ハイブリッド式荷役装置 | |
| JP5412842B2 (ja) | クレーンシステム及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120528 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20130624 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130628 |