JP2011063243A - 移動体 - Google Patents
移動体 Download PDFInfo
- Publication number
- JP2011063243A JP2011063243A JP2009218173A JP2009218173A JP2011063243A JP 2011063243 A JP2011063243 A JP 2011063243A JP 2009218173 A JP2009218173 A JP 2009218173A JP 2009218173 A JP2009218173 A JP 2009218173A JP 2011063243 A JP2011063243 A JP 2011063243A
- Authority
- JP
- Japan
- Prior art keywords
- stand
- portions
- movable
- vehicle
- fixed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Landscapes
- Motorcycle And Bicycle Frame (AREA)
Abstract
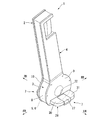
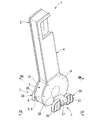
【解決手段】走行面を移動可能な車輪体5と、車輪体5を駆動する駆動力を発生させるアクチュエータ装置6と、これらが組み付けられた基体4とを備えた全方向移動車両1において、基体4の一側面の下方にステップ兼スタンド7を設け、このステップ兼スタンド7を、基体4の一側面に一端が固定された固定部27と、固定部27の他端側を支点として回転可能とされた可動部28とで構成する。そして、可動部28を回転させることで、ステップ兼スタンド27に乗員の足を載せるためのステップとしての機能と車両の倒立状態を保持させるスタンドとしての機能を併せ持たせるようにする。
【選択図】図1
Description
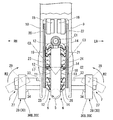
より一般的に言えば、右側のフリーローラ12は、回転部材11が軸心C2の周りに回転駆動されたときに、車輪体5との接触面で、軸心C2周りの方向の摩擦力成分(車輪体5の内周の接線方向の摩擦力成分)と、車輪体5の前記横断面中心C1の周り方向の摩擦力成分(円形の横断面の接線方向の摩擦力成分)とを車輪体5に作用させ得るような姿勢で、車輪体5の内周面に圧接されている。左側のフリーローラ14についても同様である。
そして、ここで、右側カバー部材10、左側カバー部材9は、上述したように図示しない付勢手段によって、右側カバー部材10、左側カバー部材9の下端部側が狭まる方向に付勢されている。このため、この付勢力によって、右側のフリーローラ12と左側のフリーローラ14との間に車輪体5が挟持されると共に、車輪体5に対する各フリーローラ12,14の圧接状態(より詳しくはフリーローラ12,14と車輪体5との間で摩擦力が作用し得る圧接状態)が維持されるようになっている。
なお、かかる制御を実行する手段として車両1には、図示しないが、マイクロコンピュータや電動モータ15,16のドライブ回路ユニットなどを含む電子回路ユニットにより構成された制御ユニット、基体4の所定の部位の鉛直方向(重力方向)に対する傾斜角及びその変化速度を計測するための傾斜センサ、車両1に乗員が搭乗しているか否かを検知するための荷重センサ、電動モータ15,16のそれぞれの出力軸の回転角度及び回転角速度を検出するための角度センサとしてのロータリエンコーダ等が搭載されている。
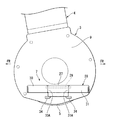
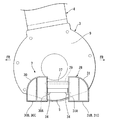
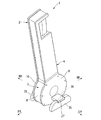
なお、乗員が車両1に乗車する場合には、上記ラチェット機構を解除した上で、図4に示す回転矢印R2方向に可動部28,28を回転させることで、ステップ兼スタンド部7,7を再度ステップとして機能させることができる。
かかる態様でも、一構成部品でステップとスタンドの機能を実現できるため、車両1の倒立状態を安定的に保持するスタンドを構成するにあたり部品点数の増加を避けることができ、軽量化及び省スペース化を実現できる。
5 移動動作部(被駆動機構)
6 アクチュエータ装置(駆動部)
7 ステップ兼スタンド部(スタンド)
27 固定部
28 可動部
32 連結ストッパ部(第1ストッパ部)
34 ストッパ凸部(第2ストッパ部)
Claims (4)
- 走行面を移動可能な被駆動機構と、前記被駆動機構を駆動する駆動力を発生させる駆動部と、前記被駆動機構および前記駆動部が組み付けられた基体とを備えた移動体であって、
前記基体の少なくとも一側面の下方に設けられたスタンドを有し、
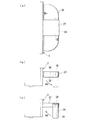
前記スタンドが、前記基体の一側面に一端が固定された固定部と、該固定部の他端側を支点として回転可能とされた可動部とを有することを特徴とする移動体。 - 前記可動部は、前記固定部の上面に当接可能な第1ストッパ部を有し、
前記第1ストッパ部は、前記固定部の上面に当接した状態から前記固定部の上方および前記他端側の外方を通って前記固定部の下方まで、前記可動部とともに回転可能とされていることを特徴とする請求項1に記載の移動体。 - 前記可動部が前記固定部の下方まで回転された箇所において、該可動部の回転を規制する第2ストッパ部を設けることを特徴とする請求項2に記載の移動体。
- 前記移動体が倒立振子制御型移動体であることを特徴とする請求項1〜3のいずれか1項に記載の移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009218173A JP5436117B2 (ja) | 2009-09-18 | 2009-09-18 | 移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009218173A JP5436117B2 (ja) | 2009-09-18 | 2009-09-18 | 移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011063243A true JP2011063243A (ja) | 2011-03-31 |
| JP5436117B2 JP5436117B2 (ja) | 2014-03-05 |
Family
ID=43949941
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009218173A Expired - Fee Related JP5436117B2 (ja) | 2009-09-18 | 2009-09-18 | 移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5436117B2 (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2808236A1 (en) | 2013-05-31 | 2014-12-03 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| DE102014203153A1 (de) | 2013-05-31 | 2014-12-04 | Honda Motor Co., Ltd. | Fahrzeug vom Typ eines inversen Pendels |
| US8949010B2 (en) | 2013-03-29 | 2015-02-03 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9022425B1 (en) | 2013-10-25 | 2015-05-05 | Honda Motor Co., Ltd. | Inverted pendulum control type moving body |
| JP2015093541A (ja) * | 2013-11-11 | 2015-05-18 | 本田技研工業株式会社 | 倒立振子制御型移動体 |
| US9139224B2 (en) | 2013-03-29 | 2015-09-22 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9317039B2 (en) | 2013-03-29 | 2016-04-19 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9346511B2 (en) | 2013-03-27 | 2016-05-24 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9367066B2 (en) | 2013-03-29 | 2016-06-14 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9423795B2 (en) | 2013-03-29 | 2016-08-23 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9511656B2 (en) | 2013-05-31 | 2016-12-06 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9950762B2 (en) * | 2016-05-17 | 2018-04-24 | Honggui Lin | Electro-mechanical gyro-balanced unicycle |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004217170A (ja) * | 2003-01-17 | 2004-08-05 | Sony Corp | 2輪車および車体制動装置 |
| JP2007062682A (ja) * | 2005-09-02 | 2007-03-15 | Toyota Motor Corp | 走行体 |
| WO2008139740A1 (ja) * | 2007-05-16 | 2008-11-20 | Honda Motor Co., Ltd. | 全方向に移動可能な乗り物 |
-
2009
- 2009-09-18 JP JP2009218173A patent/JP5436117B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004217170A (ja) * | 2003-01-17 | 2004-08-05 | Sony Corp | 2輪車および車体制動装置 |
| JP2007062682A (ja) * | 2005-09-02 | 2007-03-15 | Toyota Motor Corp | 走行体 |
| WO2008139740A1 (ja) * | 2007-05-16 | 2008-11-20 | Honda Motor Co., Ltd. | 全方向に移動可能な乗り物 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9346511B2 (en) | 2013-03-27 | 2016-05-24 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9423795B2 (en) | 2013-03-29 | 2016-08-23 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US8949010B2 (en) | 2013-03-29 | 2015-02-03 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9139224B2 (en) | 2013-03-29 | 2015-09-22 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9317039B2 (en) | 2013-03-29 | 2016-04-19 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9367066B2 (en) | 2013-03-29 | 2016-06-14 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| DE102014203153A1 (de) | 2013-05-31 | 2014-12-04 | Honda Motor Co., Ltd. | Fahrzeug vom Typ eines inversen Pendels |
| EP2808236A1 (en) | 2013-05-31 | 2014-12-03 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9061721B2 (en) | 2013-05-31 | 2015-06-23 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9511656B2 (en) | 2013-05-31 | 2016-12-06 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9505459B2 (en) | 2013-05-31 | 2016-11-29 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| US9022425B1 (en) | 2013-10-25 | 2015-05-05 | Honda Motor Co., Ltd. | Inverted pendulum control type moving body |
| JP2015093541A (ja) * | 2013-11-11 | 2015-05-18 | 本田技研工業株式会社 | 倒立振子制御型移動体 |
| US9302727B2 (en) | 2013-11-11 | 2016-04-05 | Honda Motor Co., Ltd. | Inverted pendulum control type moving body |
| DE102014222488A1 (de) | 2013-11-11 | 2015-08-06 | Honda Motor Co., Ltd. | Beweglicher Körper mit Inverspendel-Steuerung |
| DE102014222488B4 (de) * | 2013-11-11 | 2021-02-11 | Honda Motor Co., Ltd. | Beweglicher Körper mit Inverspendel-Steuerung |
| US9950762B2 (en) * | 2016-05-17 | 2018-04-24 | Honggui Lin | Electro-mechanical gyro-balanced unicycle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5436117B2 (ja) | 2014-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5436117B2 (ja) | 移動体 | |
| JP5398446B2 (ja) | 駆動装置 | |
| US9505459B2 (en) | Inverted pendulum type vehicle | |
| US8460154B2 (en) | Frictional drive device and inverted pendulum type vehicle using the same | |
| CN101657347A (zh) | 全方向驱动装置以及使用该全方向驱动装置的全方向移动车 | |
| JP6424131B2 (ja) | 摩擦式走行装置 | |
| EP2641511B1 (en) | Child swing apparatus | |
| JP5443387B2 (ja) | 車輪及びそれを用いた摩擦式駆動装置及び全方向移動体 | |
| JP6099484B2 (ja) | 倒立振子型車両 | |
| JP5292242B2 (ja) | 摩擦式駆動装置および倒立振子型移動体 | |
| JP6417263B2 (ja) | 摩擦式走行装置および全方向移動装置 | |
| JP5426682B2 (ja) | 摩擦式駆動装置および倒立振子型移動体 | |
| JPWO2008132779A1 (ja) | 全方向駆動装置及びそれを用いた全方向移動車 | |
| JP2015093651A (ja) | 車輪及び車輪装置及び倒立振子型車両 | |
| CN102245397A (zh) | 摩擦式驱动装置及使用该摩擦式驱动装置的全方向移动体 | |
| EP3333062B1 (en) | Straddled electric vehicle | |
| KR101626862B1 (ko) | 볼구동 유닛 및 이를 포함하는 볼구동 이동장치 | |
| JP2005344777A (ja) | 球体輪駆動機構及びその走行方法 | |
| JP6511324B2 (ja) | 摩擦式走行装置および全方向移動装置 | |
| JP6650371B2 (ja) | 倒立振子型車両 | |
| JP5337650B2 (ja) | 倒立振子型移動体 | |
| KR200489884Y1 (ko) | 모션 시뮬레이터 | |
| JP4306459B2 (ja) | 車輪支持装置 | |
| JP6700990B2 (ja) | 倒立振子型車両 | |
| JP6748013B2 (ja) | 倒立振子型移動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130711 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5436117 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |