以下、本実施の形態について添付図面を参照して詳細に説明する。なお、以下においては、本発明に係る自転車用サドルの位置調整システムを電動アシスト自転車に適用した例について説明するが、適用対象となる自転車はこれに限定されるものではなく、電動アシスト機能を有しない自転車に適用することもできる。また、本発明に係る自転車用サドルの位置調整システムは、ロードレーサー、マウンテンバイク、シティサイクルを含む任意のタイプの自転車に適用することができる。
本実施の形態に係る自転車用サドルの位置調整システムは、自転車が走行する走行路の傾斜角度に応じてサドルの前後方向の位置及び角度を調整することにより、運転者が運転し易い位置にサドルを配置する。これにより、運転時における安定性を確保することを通じて安全性及び快適性を向上するものである。
以下、本実施の形態に係る位置調整システムの構成について説明する。図1は、本実施の形態に係る自転車用サドルの位置調整システム(以下、「位置調整システム」という)100のシステム構成図である。なお、図1においては、本実施の形態に係る位置調整システム100の構成例を示したものであり、これに限定されるものではなく適宜変更が可能である。
図1に示すように、位置調整システム100は、システム全体を総括的に制御する制御手段101と、これに接続された傾斜センサ102、位置調整機構103、入力手段104及び表示手段105とを含んで構成される。また、位置調整システム100において、制御手段101は、図示しないインターフェイスを介して、多機能携帯電話(スマートフォン)などの外部端末200と接続可能に構成されている。
傾斜センサ102は、位置調整システム100が搭載される自転車の走行路の傾斜角度を検出する。例えば、傾斜センサ102は、重力加速度を測定することにより装着される自転車の傾きを通じて走行路の傾斜角度を検出する。本実施の形態においては、走行路の傾斜角度を精度良く検出することを前提として、単一又は複数の傾斜センサ102が自転車の所定位置に取り付けられる。なお、傾斜センサ102は、特許請求の範囲における検出手段を構成する。
位置調整機構103は、制御手段101からの指示に応じてサドルの車体前後方向の位置及び角度を変化させる。例えば、位置調整機構103は、サドルの位置及び角度を変化させるための駆動力を供給する単一又は複数の駆動モータを含む。詳細について後述するように、位置調整機構103は、制御手段101から与えられるサドルの位置及び角度に関する調整値に基づいてサドルの位置及び角度を調整する。なお、位置調整機構103は、特許請求の範囲における位置調整機構を構成する。
入力手段104は、自転車に対する運転者から入力される指示を受け付ける。例えば、入力手段104は、電動アシスト機能のオン/オフやアシスト力の調整指示、或いは、サドルの位置及び角度の自動調整機能のオン/オフやサドルの位置及び角度の調整指示を受け付けることができる。なお、入力手段104は、このような運転車からの指示を受け付けるために必要なボタンや、タッチパネル等の入力画面を備えることが好ましい。
表示手段105は、自転車に関する情報を含む任意の情報を表示する。例えば、表示手段105は、自転車の速度やバッテリ残量、入力手段104を介して運転者から入力された入力情報や制御手段101の状態情報、並びに、傾斜センサ102が検出した走行路の傾斜角度やサドルの位置及び角度などの情報を表示することができる。また、表示手段105は、気温や時刻などの情報を表示するようにしてもよい。
制御手段101は、これらの構成要素を制御し、自転車のサドルの位置及び角度を調整する。この調整機能を実現するため、制御手段101は、調整値演算部111及び記憶部112を有する。調整値演算部111は、サドルの前後方向の位置及び角度に関する調整値を演算する。詳細について後述するように、調整値演算部111は、傾斜センサ102で検出される走行路の傾斜角度に基づいて調整値を演算する。記憶部112は、調整値演算部111による調整値の演算に必要な情報を記憶する。例えば、記憶部112は、先行して演算した調整値や、演算した調整値に応じた位置調整機構103の駆動量を定めた調整値テーブル等を記憶する。なお、調整値演算部111(制御手段101)は、特許請求の範囲における演算手段を構成する。この調整値演算部111により演算される調整値は、後述するサドル移動量bや差分Δb及び差分Δθを含む概念である。
多機能携帯電話(スマートフォン)などの外部端末200は、例えば、運転者の身体情報(後述する膝下長等の情報)等を制御手段101に提供する。制御手段101では、外部端末200から提供される情報を調整値の演算に利用することができる。
次に、本実施の形態に係る位置調整システム100が適用される自転車の構成について説明する。図2は、本実施の形態に係る位置調整システム100が適用される自転車1の側面図である。なお、図2においては、説明の便宜上、本実施の形態に係る位置調整システム100と直接的に関連しない自転車1の構成要素を適宜省略するが、一般的な自転車が備える構成要素については備えているものとする。また、図2においては、説明の便宜上、自転車1の車体前方を矢印FR、車体後方を矢印REでそれぞれ示す。図3以降の図面においても同様である。
図2に示すように、自転車1は、車体フレーム2を備えている。車体フレーム2は、その前端に位置するヘッドチューブ21と、ヘッドチューブ21から後方側に延びるトップチューブ22と、トップチューブ22の後端部から前方斜め下向きに延びるシートチューブ23と、トップチューブ22の後端部から後方斜め下向きに延びるシートステー24とを有している。また、車体フレーム2は、ヘッドチューブ21から後方斜め下向きに延びるダウンチューブ25と、ダウンチューブ25の下端部から後方側に延びるチェーンステー26とを有している。シートチューブ23の下端部は、ダウンチューブ25の下端部とチェーンステー26の前端部に連結される。シートステー24の下端部は、チェーンステー26の後端部に連結される。
ヘッドチューブ21の下端には、前方斜め下向きに延びるフロントフォーク3が設けられている。このフロントフォーク3の下端部には、前輪4が回転自在に支持されている。前輪4の上方はフロントフォーク3に設けられたフロントフェンダ31によって覆われている。ヘッドチューブ21の上端には、ステム51を介してハンドルバー5が取り付けられる。ハンドルバー5には、前輪4及び後述する後輪7用のブレーキレバーや、上述した制御手段101、傾斜センサ102、入力手段104や表示手段105などが取り付けられる。なお、これらの制御手段101、傾斜センサ102、入力手段104や表示手段105は、サイクルコンピュータの一部の構成要素として備えることもできる。また、ヘッドチューブ21の上端近傍には、車体前方側を照らすライト21aが取り付けられている。
シートチューブ23の上端には、シートポスト23aを介してサドル6が取り付けられる。シートポスト23aは、シートチューブ23に対して高さ調整可能に取り付けられる。例えば、シートポスト23aの高さ調整は、シートチューブ23の上端部近傍に設けられ、シートチューブ23の内径を調整するシートクランプにより行うことができる。シートポスト23aには、車体後方から照射された光を反射する反射鏡23bが取り付けられている。詳細について後述するように、サドル6には、サドル6の前後方向の位置及び角度を調整する位置調整機構601(602)が設けられている(図4(図10)参照)。なお、この位置調整機構601(602)は、図1に示す位置調整機構103に相当する。
チェーンステー26の後端部には、後輪7が回転自在に支持されている。後輪7の上方はシートステー24に設けられたリアフェンダ241によって覆われている。シートチューブ23の下端には、クランクセット8が装着されている。クランクセット8は、クランク81と、スプロケット82とが一体化して構成される。なお、クランクセット8は、チェーンセットと呼ぶこともできる。クランク81の先端には、ペダル811が取り付けられている。クランクセット8のスプロケット82と、後輪7に設けられたスプロケット71とにはチェーン9が取り付けられている。運転者がペダル811を踏むことで得られる駆動力(主駆動力)がチェーン9を介して後輪7に伝達されて、後輪7が駆動するように構成される。
後輪7の中央には、電動アシスト機能がオン状態とされた場合に駆動される電動機10が設けられている。電動機10は、ペダル811からの運転者の踏力による主駆動力に応じた補助駆動力を生成する。電動機10の内部には、後輪7に補助駆動力を供給する電動モータが備えられている。シートチューブ23の前方には、この電動機10(電動モータ)に電力を供給するバッテリ11が着脱可能に取り付けられている。クランクセット8の近傍には、運転者の踏力による主駆動力を検出する不図示のトルクセンサが設けられている。電動機10は、このトルクセンサで検出された主駆動力に応じた補助駆動力を後輪7に供給する。したがって、電動アシスト機能がオン状態とされた場合、後輪7には主駆動力に補助駆動力が加えられた駆動力が供給されることとなる。
ここで、本実施の形態に係る位置調整システム100により調整されるサドル6の位置及び角度について、図2を参照しながら説明する。一般的にサドル6の前後方向の位置は、平地走行時において、クランクセット8の前方側のクランク81が走行路と平行か或いは僅かに上方側に配置された際に、ペダル811の中心線に合わせて置いた拇指球Aと膝関節の中心部Bとが垂直に揃うのが理想的であるとされている(図2に示す状態)。これは、膝関節の中心部Bと拇指球の中心部Aとが垂直線上に配置される場合に運転者による踏力を最大化できるからである。このため、既存の自転車では、膝関節と拇指球とがこのように配置される位置を想定してサドル6の前後方向の位置を設定している。
一方で、ペダル811の位置は、膝関節との関係において走行路の傾斜状態で微妙に変化する。例えば、走行路が上方側に傾斜した状態(上り坂)では、平地走行時と比べてペダル811の位置が膝関節よりも前方側に配置される。一方、走行路が下方側に傾斜した状態(下り坂)では、平地走行時と比べてペダル811の位置が膝関節よりも後方側に配置される。したがって、既存の自転車におけるサドルの位置においては、上り坂では膝関節よりも前方側に配置されるペダル811を踏み込む必要があり、下り坂では膝関節よりも後方側に配置されるペダル811を踏み込む必要がある。この場合、運転者の踏力が効率的にペダル811に伝達されず、運転者の疲労の原因となり得る。
本発明者らは、このように走行路の傾斜状態に応じて踏力を効率的に伝達できる膝関節の位置が変化する点に着目し、本発明に想到した。すなわち、本実施の形態に係る位置調整システム100においては、走行路の傾斜状態に応じてペダル811の位置が膝関節との関係にて変化する場合においても、拇指球と膝関節との理想的な位置関係を維持できるようにサドル6の前後方向の位置及び角度を調整する。
例えば、自転車1の走行路が上り坂であり、その傾斜角度が大きくなる場合を想定する。図3は、本実施の形態に係る位置調整システム100におけるサドルの位置調整機能の概要の説明図である。図3Aでは自転車1の走行路が緩やかな上り坂である場合を示し、図3Bでは自転車1の走行路が図3Aよりも傾斜角度が大きい上り坂である場合を示している。より具体的には、図3Aでは上り坂の傾斜角度がθαであり、図3Bでは傾斜角度が(θα+θβ)である場合について示している。
図3Aに示すように、自転車1の走行路が緩やかな上り坂である場合、図2に示す平地走行時と比べてペダル811の位置が膝関節との関係で僅かに前方側に配置される。この場合、ペダル811上の運転者の足の拇指球は図2に示す場合と比べて僅かに前方側に配置され、拇指球の中心部A1も図2に示す中心部Aよりも前方側に配置される。このため、位置調整システム100では、この拇指球の中心部A1の垂直線上に膝関節の中心部B1が配置される位置にサドル6の前後方向の位置及び角度を変化させる。これにより、拇指球と膝関節との理想的な位置関係を維持することができ、運転者の踏力を効率的にペダル811に伝達することができる。
また、図3Bに示すように、自転車1の走行路の傾斜角度が大きくなった場合、図3Aに示す傾斜時と比べてペダル811の位置が膝関節との関係で更に前方側に配置される。この場合、ペダル811上の運転者の足の拇指球は図3Aに示す場合と比べて更に前方側に配置され、拇指球の中心部A2も図3Aに示す中心部A1よりも前方側に配置される。このため、位置調整システム100では、この拇指球の中心部A2の垂直線上に膝関節の中心部B2が配置される位置にサドル6の前後方向の位置及び角度を変化させる。これにより、拇指球と膝関節との理想的な位置関係を維持することができ、運転者の踏力を効率的にペダル811に伝達することができる。
ここで、本実施の形態に係る自転車1のサドル6に適用される位置調整機構601の構成例について、図4〜図6を参照しながら説明する。図4及び図5は、それぞれ本実施の形態に係る自転車1のサドル6に適用される位置調整機構601の側面図及び斜視図である。図4及び図5においては、説明の便宜上、サドル6を構成するサドル本体を省略している。図6は、本実施の形態に係る自転車1のサドル6に適用される位置調整機構601の構成部品の説明図である。図6においては、説明の便宜上、図5に示す位置調整機構601の一部の構成部品を省略している。
図4及び図5に示すように、位置調整機構601は、シートポスト23aの上端部に着脱可能に取り付けられる。位置調整機構601は、クランプ部材61と、ガイドレール62と、第1スライダ63及び第2スライダ64と、駆動機構65と、サドル固定板(以下、「固定板」という)66とを含んで構成される。なお、ガイドレール62は、特許請求の範囲におけるガイドレールを構成する。また、第1スライダ63及び第2スライダ64は、特許請求の範囲におけるスライド部材を構成するがこれに限定されない。特許請求の範囲におけるスライド部材は、これらの第1スライダ63及び第2スライダ64と、固定板66とを一体化した部材を含む概念である。
クランプ部材61は、概して円筒形状を有する円筒形状部611と、この円筒形状部611の後部から後方側に延びる左右一対の支持壁部612と、これらの支持壁部612の外側に設けられる左右一対のレール保持部613と、これらのレール保持部613に挿通される固定ネジ614とを有する(支持壁部612について図6参照)。クランプ部材61は、円筒形状部611の内側にシートポスト23aの上端部を収容した状態で、左右のレール保持部613の外側から固定ネジ614で締め付けることにより、円筒形状部611の内壁面が縮小されてシートポスト23aに固定される。
レール保持部613の上端近傍には、概して車体前後方向に延在した貫通孔615が形成されている(図5参照)。この貫通孔615は、ガイドレール62を構成する棒材の外径と略同一の内径を有している。ガイドレール62を構成する棒材が貫通孔615に挿通された状態で、固定ネジ614でクランプ部材61がシートポスト23aに固定されることにより、レール保持部613は、ガイドレール62を位置ずれすることなく保持することができる。
ガイドレール62は、例えば、剛性を有する1本の金属棒材を折り曲げて構成される。ガイドレール62は、前後方向に延在する一対のレール部621と、これらのレール部621の前端部に連続して設けられ車幅方向に延在する連結部622と、これらのレール部621の後端部からそれぞれ車幅方向外側に延びる一対の軸部623とを有している(図6B参照)。左右のレール部621は、互いに平行に配置されている。連結部622は、左右に配置されたレール部621の前端部同士を連結する。軸部623は、車体の幅方向に延在し、その中心(軸心)が同一直線上に配置されている。
図4に示すように、レール部621は、側面視にて、クランプ部61のレール保持部613よりも後方側の一部が略水平に延びている。一方、クランプ部61のレール保持部613よりも前方側の一部には、該当するレール部621の中央付近に頂部621aが設けられると共に、その前方側に下向きに延在する傾斜部621bが設けられている。傾斜部621bは、詳細について後述するように、第2スライダ64の位置に応じてサドル6の座面の角度を変化させる役割を果たす。なお、傾斜部621bは、特許請求の範囲における傾斜部を構成する。
第1スライダ63は、固定板66の後端部近傍の下面に取り付けられる。第1スライダ63は、固定板66の下面との間にクッション部材C1を介在した状態で、固定板66の上面側から左右一対の固定ネジ664により固定板66に取り付けられている。固定板66に取り付けられた状態において、第1スライダ63は、クランプ部材61の後方側であって、駆動機構65の前方側に配置されている。なお、クッション部材C1は、固定板66の下方側であって後端部近傍の左右に配置されており、サドル6から固定板66を介して作用する荷重を吸収する役割を果たす。
ここで、図6を参照して第1スライダ63の構成について説明する。なお、図6Aにおいては、図5から固定板66、クッション部材C1及び固定ネジ664を取り外した状態を示している。図6Bにおいては、更に後述する第1スライダ63のカバー部632及び駆動機構65の一部(より具体的には、ケース651及びケース651内に収容される伝達機構)を取り外した状態を示している。
図6A、図6Bに示すように、第1スライダ63は、ベース部631と、ベース部631の上方に被せられるカバー部632と、カバー部632内に配置されるナット部633及び複数(本実施の形態では4個)のローラ634とを有する。第1スライダ63は、内部にナット部633及び複数のローラ634を収容した状態でカバー部632がベース部631の上面に固定されることで構成される。第1スライダ63は、これらの構成要素を有し、駆動機構65の駆動力を受ける。
ベース部631は、車体の幅方向(車幅方向)に延在する長尺部631aと、この長尺部631aの両端に設けられた円板形状部631bとを有する(図6B参照)。円板形状部631bの中央には、貫通孔631cが形成されている。貫通孔631cには、ベース部631の下方側から固定ネジ635が挿通される。この固定ネジ635は、上述した固定ネジ664と共に第1スライダ63を固定板66に固定する役割を果たす。
カバー部632は、下方側に開口した箱状体632aと、この箱状体632aの側面から延出して設けられた円板形状部632bとを有する(図6A参照)。箱状体632aは、概して車幅方向に長辺を配置した直方体形状を有している。円板形状部632bは、箱状体632aの車幅方向の側面の一部が下方側に延出する腕部632cの先端に設けられている。また、箱状体632aには、この腕部632cに対向して支持壁部632dが下方側に延びて設けられている。ガイドレール62のレール部621は、これらの腕部632cと支持壁部632dとの間の空間に配置される。円板形状部632bは、ベース部631の円板形状部631bと略同一寸法に設けられ、その中央には固定ネジ635が挿通される貫通孔632eが形成されている。
ナット部633は、平板形状を有している(図6B参照)。ナット部633の前後方向の寸法は、カバー部632の内壁面間の寸法よりも僅かに小さく構成されている。また、ナット部633の車幅方向の寸法は、カバー部632の支持壁部632d間の寸法よりも僅かに小さく構成されている。したがって、カバー部632内に収容された状態で、ナット部633の前面及び後面は微小なギャップを有した状態でカバー部632の内壁面と対向し、左右の側面は微小なギャップを有した状態で支持壁部632dの内壁面と対向する。ナット部633の中央には、車体の前後方向に貫通孔633aが形成されている。貫通孔633aは、その内周面にネジ溝が形成されており、後述する駆動機構65のリードネジ653の一部と螺合可能に構成されている。
複数のローラ634は、ガイドレール62のレール部621を構成する棒材を収容可能な溝部が外周面に形成されたガイドローラで構成される(図6B参照)。これらのローラ634は、カバー部632内に収容された状態で、カバー部632の腕部632cと支持壁部632dとの間の空間に回転可能に軸支される。これらのローラ634は、位置調整機構601が組み立てられた状態にて、ガイドレール62のレール部621を上下方向から挟み込む位置に配置されている。
第2スライダ64は、図4及び図5に示すように、固定板66の前端部に設けられた後述するノーズ部662に揺動自在に取り付けられている。第2スライダ64は、概して直方体形状を有する本体部641と、この本体部641の側面に回転可能に支持される複数(本実施の形態では6個)のローラ642とを有する。第2スライダ64は、本体部641に車幅方向に貫通する貫通孔641aに挿通された固定ネジ70によって固定板66のノーズ部662に揺動自在に取り付けられる(図6A、図6B参照)。
本体部641は、ガイドレール62の左右一対のレール部621の間に配置される。本体部641は、第2スライダ64が固定板66に取り付けられた状態において、レール部621の傾斜部621bに対応する位置に配置される。複数のローラ642は、第1スライダ63のローラ634と同様に、ガイドレール62のレール部621を構成する棒材を収容可能な溝部が外周面に形成されたガイドローラで構成される(図6B参照)。複数のローラ642は、ガイドレール62のレール部621を上下方向から挟み込む位置に配置されている。なお、ローラ642は、第1スライダ63のローラ634と異なり、レール部621の延在方向の異なる位置にて、レール部621を上下方向から挟み込むように構成されている。
駆動機構65は、図4に示すように、駆動機構65の構成部品を支持、収容するケース651と、ケース651から一部が前方側に突出するように支持されたステッピングモータ652と、ケース651に回転自在に軸支されるリードネジ653と、ステッピングモータ651の駆動力をリードネジ652に伝達する図示しない伝達機構とを有する。なお、ステッピングモータ652は、特許請求の範囲における駆動モータを構成する。駆動機構65は、例えば、上述した入力手段104を介して運転者からサドル6の位置調整機能の実行が指示された場合に駆動される。
ケース651は、概して前方側に開口した形状を有する(図6A参照)。ケース651には、下方側部分にステッピングモータ652を支持するモータ支持部651aと、上方側部分にリードネジ653を回転自在に支持するネジ支持部651bとが設けられている。また、このネジ支持部651bの側方には、ガイドレール62の軸部623を保持するレール保持部651cが設けられている。レール保持部651cの端部近傍の前面には、内部に収容した軸部623の脱落を防止する一対のストッパ651dが設けられている。
ステッピングモータ652は、本実施の形態に係る位置調整機構601の駆動源を構成する。ステッピングモータ652は、図示しない駆動軸をケース651内に位置させると共に、モータ本体部652aをケース651の前方側に露出させた状態でモータ支持部651aに支持されている(図4参照)。ステッピングモータ652の駆動軸には駆動ギヤが固定されており、この駆動ギヤがケース651に収容された伝達機構の入力ギヤに噛合するように構成されている。なお、ステッピングモータ652は、上述したバッテリ11から電力の供給を受けて駆動される。
ケース651に収容される伝達機構は、複数のギヤで構成されている。伝達機構は、上述した入力ギヤにステッピングモータ652から入力された駆動力を、中間ギヤを介して出力ギヤに伝達する。この伝達機構の出力ギヤは、後述するリードネジ653のギヤ653cに噛合するように構成されている。したがって、ステッピングモータ652から入力された駆動力は、伝達機構を構成する複数のギヤを介してリードネジ653に伝達される。
リードネジ653は、頭部653aと、頭部653aから前方側に延びるネジ軸部653bと、ネジ軸部653bの外周に設けられたギヤ部653cとを有する(図6参照)。リードネジ653は、ネジ軸部653bを前後方向に延在させた状態でケース651のネジ支持部651bに回転自在に支持されている。リードネジ653は、ギヤ部653cがケース651内の伝達機構の出力ギヤと噛合する位置に配置される。ネジ軸部653bは、ガイドレール62の一対のレール部621の間で前後方向に延在し、第1スライダ63のナット部633に形成された貫通孔633aに挿通される。ナット部633の貫通孔633aとネジ軸部653bとの間には複数の微小なボールが収容されている。すなわち、駆動機構65は、ボールネジ機構を有する。
固定板66は、平面視にて概してY字形状を有する平面部661を備える(図5参照)。この平面部661の前端部には、下方側及び後方側に開口した形状を有するノーズ部662が設けられている。ノーズ部662は、その内側の空間に第2スライダ64の一部を収容可能に構成されている。また、平面部661の後端部には、固定ネジ635が挿通される一対の固定孔663が形成されている。固定板66の上方には、図示しないサドル本体が装着される。このサドル本体の上面に配置される座面は、固定板66の平面部661と平行に配置される。
位置調整機構601は、このような構成部品を有し、図4に示すように、クランプ部材61のレール保持部613でガイドレール62を保持する。ガイドレール62には、第1スライダ63及び第2スライダ64がスライド移動可能に取り付けられる。これらの第1スライダ63及び第2スライダ64には固定板66が固定されている。第1スライダ63及び第2スライダ64を介してガイドレール62に取り付けられた状態において、固定板66の平面部661と傾斜部621bとは一定以上の角度差を有して配置される。
固定板66に固定された状態において、第1スライダ63は、シートポスト23aの後方側に配置される。一方、第2スライダ64は、シートポスト23aの前方側に配置されている。このように第1スライダ63をシートポスト23aの後方側に配置し、第2スライダ64をシートポスト23aの前方側に配置することにより、シートポスト23aの前方側及び後方側の空間を有効に活用することができる。これにより、サドル6の周辺に大きな空間を必要とすることなく位置調整機構601を組み込むことができる。
駆動機構65は、第1スライダ63の後方側に配置されている。このため、比較的大きなスペースが必要となる駆動機構65をサドル6の後方側に配置することができる。これにより、乗車時や運転時などに駆動機構65が運転者の邪魔になるのを防止することができる。駆動機構65は、ガイドレール62の一対のレール部621の間に配置されたネジ軸部653bを回転させることで第1スライダ63のナット部633に駆動力を供給する。これにより、ガイドレール62の間に形成される空間を有効に活用しながら、駆動機構65の駆動力を第1スライダ63に伝達することができる。
駆動機構65は、ガイドレール21の軸部623をケース651のレール保持部651cで保持している(図6参照)。レール保持部651cで軸部623を保持することにより、駆動機構65は、軸部623の軸心を中心に揺動可能にガイドレール62の後端部に取り付けられた状態となっている。このため、駆動機構65から第1スライダ63に駆動力を伝達する上で必要な構成部品間の位置精度を確保しつつ、第1スライダ63を駆動することができる。これにより、例えば、運転者の体重等によりガイドレール62が瞬間的に歪むような場合でも、駆動機構65がガイドレール62に対して揺動することによりその歪みを吸収しながら第1スライダ63を駆動することができる。
ガイドレール62に駆動機構65が取り付けられた状態において、ケース651のネジ支持部651bに支持されたリードネジ653は、第1スライダ63のナット部633の貫通孔633aに挿通される(図6B参照)。ケース651内に収容された伝達機構は、出力ギヤがリードネジ653のギヤ部653cに噛合する一方、入力ギヤがステッピングモータ652の駆動ギヤと噛合している。この状態において、ステッピングモータ652が駆動されると、その駆動力が伝達機構を介してギヤ部653cに伝達され、ネジ軸部653bが軸心回りに回転する。
ネジ軸部653bが回転することにより、第1スライダ63のナット部633が前後方向に移動する。例えば、前面視にてネジ軸部653bが反時計回り方向に回転することにより、ナット部633が前方側に移動する一方、前面視にてネジ軸部653bが時計回り方向に回転することにより、ナット部633が後方側に移動する。ナット部633の移動に応じて第1スライダ63が前後方向に移動する。この第1スライダ63の移動に伴い、固定板66を移動すると共に、固定板66のノーズ部662に固定された第2スライダ64も移動する。
第2スライダ64は、ガイドレール62の傾斜部621b上を移動する。したがって、第2スライダ64が前方側に移動する場合には、傾斜部621bに沿って下降しながら移動する。一方、第2スライダ64が後方側に移動する場合には、傾斜部621bに沿って上昇しながら移動する。固定板66に固定されるサドル本体は、傾斜部621bにおける第2スライダ64の位置に応じて角度が変化する。
ここで、本実施の形態に係る位置調整機構601の動作について、図7を参照して説明する。図7は、本実施の自転車1のサドル6に適用される位置調整機構601の動作の説明図である。なお、図7Aにおいては、第1スライダ63が駆動されていない状態(初期状態)を示している。
図7Aに示すように、初期状態においては、第1スライダ63が最も後方側に配置されている。この場合、第1スライダ63は、側面視にて駆動機構65の近傍の位置に配置されている。また、第2スライダ64は、ガイドレール62の傾斜部621bの頂部621a寄りの位置に配置されている。すなわち、第2スライダ64は、傾斜部621bのうち、上方側部分に配置されている。このとき、第1スライダ63及び第2スライダ64に固定される固定板66の平面部661は、自転車1が走行する地面と平行に配置される。
図7Aに示す状態から、駆動機構65のステッピングモータ652が駆動されると、上述したように、駆動力が伝達機構を介してリードネジ653のネジ軸部653bに伝達され、ネジ軸部653bが回転する。このネジ軸部653bの回転に応じてナット部633が前方側に送り出され、このナット部633の移動に伴い第1スライダ63が前方側に移動する。そして、この第1スライダ63の移動に伴い、これに固定された固定板66が前方側に移動する。この固定板66の移動に伴い、ノーズ部662に取り付けられた第2スライダ64は、ガイドレール62の傾斜部621bに沿って下降しながら前方側に移動する。このとき、固定板66の平面部661は、前端部が後端部よりも下がった状態となっている。
図7Bにおいては、第1スライダ63が最も前方側まで移動された状態を示している。この場合、第1スライダ63は、側面視にてクランプ部材61のレール保持部613の近傍の位置に配置されている。また、第2スライダ64は、ガイドレール62の傾斜部621bの連結部622寄りの位置に配置されている。すなわち、第2スライダ64は、傾斜部621bのうち、下方側部分に配置されている。このとき、第1スライダ63及び第2スライダ64に固定される固定板66の平面部661は、自転車1が走行する地面に対して前方側に傾斜した状態となる。
すなわち、本実施の形態に係る位置調整機構601においては、第1スライダ63が図7Aに示す状態から図7Bに示す状態まで移動する過程において、固定板66(より具体的には、固定板66に固定されたサドル6)の前後方向の位置を移動しながら、その平面部661(より具体的には、サドル6の座面部)を水平状態から前傾した状態に調整することができる。
次に、この位置調整機構601を用いた位置調整システム100のサドル6の位置調整動作について説明する。図8は、本実施の形態に係る位置調整システム100のサドル6の位置調整動作について説明するためのフロー図である。なお、このサドル6の位置調整動作に先立ち、制御手段101の記憶部112には、外部端末200から運転者の膝下長aが転送され、保持されているものとする。ここでは、外部端末200から膝下長aが転送される場合について説明するが、運転者が運転前に入力手段104を介して膝下長aを入力するようにしてもよい。
図8に示すように、サドル6の位置調整動作を行う際、制御手段101の調整値演算部111は、まず、傾斜センサ102で検出された傾斜角θを読み出す(ステップ(以下、「ST」という)801)。傾斜センサ102は、サドル6の自動調整機能がオンされている間、一定間隔で走行路の傾斜角度を検出すると共に、検出した傾斜角度を最新の検出結果に更新している。なお、傾斜センサ102で検出された傾斜角θは、記憶部112に保存されている。
調整値演算部111は、読み出した傾斜角θと、記憶部112に登録された運転者の膝下長aとに基づいてサドル6の前後方向の移動量(以下、適宜「サドル移動量」という)bを算出する(ST802)。より具体的には、調整値演算部111は、以下の(式1)に従ってサドル移動量bを算出する。
b = a × sinθ (式1)
そして、調整値演算部111は、算出したサドル移動量bと、前回の処理で算出されたサドル移動量(以下、「前回サドル移動量」という)b1との差分Δbを以下の(式2)により算出する(ST803)。なお、前回サドル移動量b1は、前回の算出時に記憶部112に保存されている。
Δb = b − b1 (式2)
次に、調整値演算部111は、差分Δbが予め定めたサドル6の最小移動量bminよりも大きいかを以下の(式3)により判定する(ST804)。このように差分Δbが最小移動量bminより大きいか判定するのは、差分Δbが微小にも関わらず、サドル6の位置調整動作が実行される事態を回避するためである。
bmin < |Δb| (式3)
ST804の判定において、差分Δbが最小移動量bmin以下である場合には、サドル6の位置調整動作を終了する。一方、差分Δbが最小移動量bminよりも大きい場合には、調整値演算部111は、前回サドル移動量b1に移動量bを保存する(ST805)。
次に、調整値演算部111は、記憶部112に保存された調整値テーブルから、差分Δbに対応するパルス数Pn1を読み出す(ST806)。ここで、記憶部112に保存される調整値テーブルの具体例について説明する。図9は、本実施の形態に係る位置調整システム100の制御手段101の記憶部112に保存される調整値テーブルの一例の説明図である。なお、図9Aは、サドル移動量の差分Δbに応じたパルス数Pn1を定める調整値テーブルT1を示している。また、図9Bは、後述する傾斜角θの差分Δθに応じたパルス数Pn2を定める調整値テーブルT2を示している。位置調整機構601では、図9Aに示す調整値テーブルT1のみが使用される。
図9Aに示すように、調整値テーブルT1には、サドル移動量の差分Δbに応じたパルス数Pn1が定められている。差分Δbには、最小移動量bminを基準とした値が登録されている。例えば、差分Δbとの差が+11mm(−11mm)の場合には、パルス数Pn1として+20パルス(−20パルス)が関連付けられている。また、差分Δbとの差が+1mm(−1mm)の場合には、パルス数Pn1として+10パルス(−10パルス)が関連付けられている。
最後に、調整値演算部111は、読み出したパルス数Pn1を、駆動機構65を構成するステッピングモータ652に出力する(ST807)。ステッピングモータ652は、調整値演算部111から与えられたパルス数Pn1だけ駆動し、第1スライダ63を前後方向に移動する。このとき、この第1スライダ63の移動に伴って第2スライダ64が傾斜部621bを移動する。これにより、これらに固定された固定板66の傾斜角度が調整される。この結果、サドル6の前後方向の位置及び角度が調整される。
このような一連のサドル6の位置調整動作が運転している間、繰り返し実行される。これにより、傾斜センサ102で検出された走行路の傾斜角度に応じてサドル6の前後方向の位置及び角度が自動的に調整される。このため、運転者にサドル6の位置等の調整作業を要求することなく、走行路の傾斜角度に応じてサドル6の前後方向の位置及び角度を調整することができる。
特に、位置調整機構601を用いてサドル6の位置等を調整する場合には、ガイドレール62に沿って第1スライダ63、第2スライダ64を移動させるだけでサドル6の位置等を変化させることができるので、複雑な構成を必要とすることなくサドル6の前後方向の位置及び角度を調整することができる。
また、移動量bを算出する際、調整値演算部111は、走行路の傾斜角θ及び運転者の膝下長aに基づいて演算処理を行う(ST802)。このため、運転者にとって適切な前後方向の位置及び角度にサドル6を配置することができる。この結果、より運転し易い運転姿勢を運転者に提供することができる。
さらに、調整値演算部111は、先行して算出された前回移動量b1と、現在の走行路の傾斜角度に応じた算出された移動量bとの差分に基づいて位置調整機構601に駆動量を指示する。これにより、サドル6の移動量を縮小することができ、走行路の傾斜角度に応じて適時にサドル6の前後方向の位置及び角度を調整することができる。
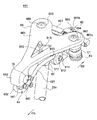
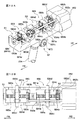
次に、本実施の形態に係る自転車1のサドル6に適用される他の位置調整機構602の構成について、図10〜図12を参照しながら説明する。図10及び図11は、それぞれ本実施の形態に係る自転車1のサドル6に適用される他の位置調整機構602の側面図及び斜視図である。図10及び図11においては、説明の便宜上、サドル6を構成するサドル本体を省略している。図12は、本実施の形態に係る自転車1のサドル6に適用される位置調整機構602の構成部品の説明図である。図12においては、説明の便宜上、図11に示す位置調整機構602の一部の構成部品を省略している。なお、図10〜図12において、図4〜図7に示す位置調整機構601と共通の機能を有する構成要素については同一の符号を付し、その詳細な説明を省略する。
図10及び図11に示すように、位置調整機構602は、シートポスト23aの上端部に着脱可能に取り付けられる。位置調整機構602は、クランプ部材67と、駆動機構68と、一対の支持部材69(691、692)と、固定板66とを含んで構成される。
クランプ部材67は、概して円筒形状を有する円筒形状部671と、この円筒形状部611の後部から後方側に延びる一対の支持壁部(不図示)と、これらの支持壁部との間で後述する駆動機構68のケース681の固定壁部681cを挟持する挟持部672と、これらの挟持部672に車幅方向に挿通される固定ネジ673とを有する。クランプ部材67は、円筒形状部671の内側にシートポスト23aの上端部を収容した状態で、左右の挟持部672の外側から固定ネジ673で締め付けることにより、円筒形状部671の内壁面が縮小されてシートポスト23aに固定される。
駆動機構68は、駆動機構68の一部の構成要素を収容するケース681と、このケース681の後方側に配置されるギヤードモータ682とを有する。ギヤードモータ682は、本実施の形態に係る位置調整機構602の駆動源を構成するものであり、ケース681内に収容される構成要素に駆動力を供給する。なお、ギヤードモータ682は、特許請求の範囲における駆動モータを構成する。
ケース681は、概して上方に開口した下部ケース681aと、概して下方に開口した上部ケース681bとを組み合わせて構成される。下部ケース681a及び上部ケース681bを組み合わせた状態にて、ケース681は、前後方向に長手方向を配置した直方体形状を有し、その内部に駆動機構68の構成部品を収容する空間が形成されている。下部ケース681aの下面の中央近傍には、下方側に突出する一対の固定壁部681cが設けられている。これらの固定壁部681cは、クランプ部材67の一対の支持壁部と挟持部672との間に配置される。
ケース681の車幅方向の両側面には、前後に離間して一対の開口部681d、681eが形成されている。これらの開口部681d、681eは、下部ケース681aと、上部ケース681bとの境界部分に形成されている。これらの開口部681d、681eからは、後述するナット部683c、684cの軸部683d、684dがケース681の内側から突出している。上部ケース681bの上面には、前後方向に延在する凹部681fが形成されている(図11参照)。この凹部681fは、後述する支持部材691、692のローラ部694、695をガイドするガイド溝として機能する。
ケース681の内部には、図12に示すように、前後に配置された空間S1と空間S2とが形成されている。これらの空間S1、S2には、それぞれボールネジ構造部683、684が配設される。ボールネジ構造部683は、下部ケース681aに軸受けを介して回転自在に支持されるネジ軸部683aと、このネジ軸部683aの後端部に一体に設けられたギヤ部683bと、ネジ軸部683aに取り付けられたナット部683cとを有する。同様に、ボールネジ構造部684は、ネジ軸部684aと、ギヤ部684bと、ナット部684cとを有する。
ナット部683cは、概して直方体形状を有すると共にその中央に前後方向に貫通する貫通孔が形成されており、この貫通孔にネジ軸部683aが貫通している。ナット部683cの貫通孔とネジ軸部683aとの間には複数の微小なボールが収容されている。これらの微小なボールは、ナット部683cの円滑な移動をサポートする役割を果たす。また、ナット部683cの両側面には、ケース681の側方側に延びる軸部683dが設けられている。これらの軸部683cは、開口部681dを介してケース681の車幅方向の外側に突出する。
同様に、ナット部684cは、概して直方体形状を有すると共にその中央に前後方向に貫通する貫通孔が形成されており、この貫通孔にネジ軸部684aが貫通している。ナット部684cの貫通孔とネジ軸部684aとの間には複数の微小なボールが収容されている。これらの微小なボールは、ナット部684cの円滑な移動をサポートする役割を果たす。また、ナット部684cの両側面には、ケース681の側方側に延びる軸部684dが設けられている。これらの軸部684cは、開口部681eを介してケース681の車幅方向の外側に突出する。
ギヤードモータ682は、筐体内に図示しない2つのステッピングモータを備えている。これらのステッピングモータの駆動軸には、直接的又は間接的にそれぞれ動力伝達シャフト682a、682bが連結されている。これらの動力伝達シャフト682a、682bは、ギヤードモータ682の筐体の前面から露出し、前方側に向けて延出している。これらの動力伝達シャフト682a、682bは、ケース681内で平行に配置され、互いに異なる長さを有している。
動力伝達シャフト682aは、空間S1に到達する長さを有する。動力伝達シャフト682aの先端には、ギヤ部682cが設けられている。このギヤ部682cは、ボールネジ構造部683のギヤ部683bと噛合するように配置される。すなわち、ギヤードモータ682から供給される駆動力は、動力伝達シャフト682aを介してボールネジ構造部683に伝達される。これにより、ネジ軸部683bが軸周りに回転し、ナット部683cが前後方向に移動できるように構成されている。
一方、動力伝達シャフト682bは、空間S2に到達する長さを有する。動力伝達シャフト682bの先端には、ギヤ部682dが設けられている。このギヤ部682dは、ボールネジ構造部684のギヤ部684bと噛合するように構成されている。すなわち、ギヤードモータ682から供給される駆動力は、動力伝達シャフト682bを介してボールネジ構造部684に伝達される。これにより、ネジ軸部684bが軸周りに回転し、ナット部684cが前後方向に移動できるように構成されている。
支持部材69は、固定板66を支持する役割を果たすものであり、図10及び図11に示すように、前方側に配置される第1支持部材691と、後方側に配置される第2支持部材692とを有する。なお、第1支持部材691、第2支持部材692は、それぞれ特許請求の範囲における第1、第2の支持部材を構成する。第1支持部材691は、固定板66の前方側部分を下方側から支持し、第2支持部材692は、固定板66の後方側部分を下方側から支持する。第1支持部材691は、後述する連結アーム693を介して固定板66の前端部近傍を揺動可能に支持するように構成されている。
第1支持部材691は、前面視にて平面部691aと、この平面部691aの両側縁部から垂下する一対の側面部691bとを有する(図11参照)。第1支持部材691は、ケース681の上方側に配置され、一対の側面部691bの内側にケース681の前端部近傍を収容するように配置されている。
平面部691aの上面中央には、アーム支持台691cが設けられている。このアーム支持台691cは、固定板66のノーズ部662に連結される連結アーム693を揺動可能に支持する。連結アーム693は、側面視して概して長方形状を有し、その上端部近傍が回転軸693aを介してノーズ部662に連結される一方、その下端部近傍が回転軸693bを介してアーム支持台691cに連結されている。連結アーム693は、これらの回転軸693a、693bの軸心を中心に揺動可能に構成されている。なお、この連結アーム693は、特許請求の範囲における連結部材を構成する。
また、平面部691aの下方には、前後に離間して一対のローラ694が配置されている(図11参照。後方側のローラ694については不図示)。これらのローラ694は、左右の側面部691bの上端部近傍にて軸部694aを介して回転可能に支持されている。それぞれのローラ694は、上部ケース681bの凹部681fよりも僅かに狭い幅を有している。第1支持部材691が前後方向に移動する際に、凹部681f内で回転しながら前後方向に移動する。
さらに、側面部691bの下端部中央には、下方側に開口した係合溝691dが形成されている。この係合溝691dは、第1支持部材691がケース681に取り付けられた状態において、ケース681の開口部681dを介して突出する軸部683dを収容して係合する。このため、ケース681内のボールネジ構造部683が駆動され、ナット部683cが前後方向に移動すると、軸部683dを介して第1支持部材691も前後方向に移動できるように構成されている。
第2支持部材692は、前面視にて平面部692aと、この平面部692aの両側縁部から垂下する一対の側面部692bと、これらの側面部692bの下端部から側方側に延出する一対の支持面部692cと、支持面部692cにクッション部材C2を介して連結される連結部692dとを有する(図11参照)。第2支持部材692は、第1支持部材691と同様に、ケース681の上方側に配置され、一対の側面部692bの内側にケース681の後端部近傍を収容するように配置されている。
平面部692aの下方には、前後に離間して一対のローラ695が配置されている(図11参照。後方側のローラ695については不図示)。これらのローラ695は、左右の側面部692bの上端部近傍にて軸部695aを介して回転可能に支持されている。それぞれのローラ695は、ローラ694と同様に、上部ケース681bの凹部681fよりも僅かに狭い幅を有している。第2支持部材692が前後方向に移動する際に、凹部681f内で回転しながら前後方向に移動する。
また、側面部692b及び支持面部692cの接続部分の中央には、係合部692eが開口して形成されている。この係合部692eは、第2支持部材692がケース681に取り付けられた状態において、ケース681の開口部681eを介して突出する軸部684dを収容して係合する(図12参照)。このため、ケース681内のボールネジ構造部684が駆動され、ナット部684cが前後方向に移動すると、軸部684dを介して第2支持部材692も前後方向に移動できるように構成されている。
左右一対の支持面部692cの上面には、クッション部材C2が配置されている。これらのクッション部材C2は、支持面部692cの下方側から固定ネジ692fで固定されている(図10参照)。一方、左右のクッション部材C2の上面部には、これらを連結するように連結部692dが配置されている。
連結部692dは、車幅方向に延在する長尺部692gと、長尺部692gの両端部に設けられる円板形状部692hと、長尺部692gから上方側に向けて設けられた一対の支持台部692iとを有する(図11参照)。連結部692dは、円板形状部692hの上方側から固定ネジ692jでクッション部材C2に固定されている。支持台部692iの上端部は、固定板66の下面に設けられた固定片665に連結されている。固定片665は、一対の支持台部692iに軸支された支持軸692kを介して連結されている。支持台部692iは、固定板66の固定片665を一定高さに配置した状態で支持するように構成されている。
位置調整機構602は、このような構成部品を有し、図10に示すように、駆動機構68のケース681に、前後方向に離間して第1支持部材691、第2支持部材692が配置されている。これらの第1支持部材691、第2支持部材692は、開口部681d、681eを介して突出する軸部683d、684dと係合して配置されている。このため、ギヤードモータ682からの駆動力を受けてケース681内のボールネジ構造部683、684が駆動されると、これに伴って第1支持部材691、第2支持部材692が前後方向に移動する。
ギヤードモータ682からの駆動力は、筐体内に収容される2個のステッピングモータから供給される。これらのステッピングモータの駆動力は、動力伝達シャフト682a、682bを介してボールネジ構造部683、684に独立して供給することができる。このため、位置調整機構602では、ボールネジ構造部683、684のいずれか一方のみ又は双方を駆動することができる。そして、このようなボールネジ構造部683、684の駆動に伴い、第1支持部材691、第2支持部材692のいずれか一方のみ又は双方が前後方向に移動する。
ここで、本実施の形態に係る位置調整機構602の動作について、図10及び図13を参照して説明する。図13は、本実施の自転車1のサドル6に適用される位置調整機構602の動作の説明図である。図13Aにおいては、図10に示す状態から第1支持部材691及び第2支持部材692が前方側に移動した状態を示している。図13Bにおいては、図13Aに示す状態から第1支持部材691のみを後方側に移動した状態を示している。なお、図10においては、第1支持部材691、第2支持部材692のいずれも駆動されていない状態(初期状態)を示している。
図10に示すように、初期状態においては、第1支持部材691及び第2支持部材692の双方が最も後方側に配置されている。この場合、第1支持部材691、第2支持部材692は、側面視にてそれぞれ開口部681d、681eの後方側部分に対応する位置に配置されている。第1支持部材691上の連結アーム693は、上端部が僅かに前方側に傾いた状態でアーム支持台691cに連結されている。このとき、第1支持部材691及び第2支持部材692に支持される固定板66の平面部661は、自転車1が走行する地面と平行に配置される。
図10に示す初期状態から、例えば、ナット部683c、684cが前方側に進むようにボールネジ構造部683、684の双方に駆動力が供給されると、軸部683d、684dを介して第1支持部材691、第2支持部材692も前方側に移動する(図13A参照)。これにより、これらの第1支持部材691及び第2支持部材692に支持された固定板66も前方側に移動する。この場合、第1支持部材691及び第2支持部材692が同時に移動することから、これらの間隔が維持される。このため、固定板66の平面部661は、自転車1が走行する地面と平行に配置された状態を維持したまま前方側に移動する。
また、図13Aに示す状態から、例えば、ナット部683cが後方側に進むようにボールネジ構造部683のみに駆動力が供給されると、軸部683dを介して第1支持部材691のみが後方側に移動する。この場合、第2支持部材692が固定された状態で第1支持部材691のみが後方側に移動する(図13B参照)。第1支持部材691のみが後方側に移動すると、連結アーム693を介して固定板66のノーズ部662が引き下げられる。これにより、固定板66は、前端部を僅かに下方側に配置した傾斜状態(前傾状態)となる。
すなわち、本実施の形態に係る位置調整機構602においては、図10に示す状態から図13Aの状態に示すように移動する過程においてサドル6の前後方向の位置を調整することができる。また、本実施の形態に係る位置調整機構602においては、図10に示す状態から図13Bの状態に示すように移動する過程においてサドル6の角度を調整することができる。
次に、この位置調整機構602を用いた位置調整システム100のサドル6の位置調整動作について説明する。図14は、本実施の形態に係る位置調整システム100のサドル6の位置調整動作について説明するためのフロー図である。なお、図14において、図8と共通する処理については、同一の符号を付し、その説明を省略する。
位置調整機構602を利用する場合においても、制御手段101の調整値演算部111は、図14に示すように、ST801〜ST807の処理を実行する。なお、ST807において、調整値演算部111は、調整値テーブルT1から読み出したパルス数Pn1を、ギヤードモータ682を構成する2つのステッピングモータの双方に出力する。2つのステッピングモータは、調整値演算部111から与えられたパルス数Pn1だけ駆動し、第1支持部材691、第2支持部材692を前後方向に同時に移動する。
次に、調整値演算部111は、ST802にて読み出した傾斜角θと、前回の処理で記憶部112に記憶された傾斜角θ1(以下、「前回傾斜角」という)θ1との差分Δθを以下の(式4)により算出する(ST901)。このように差分θを算出した後、調整値演算部111は、ST802で読み出した傾斜角θを前回傾斜角θ1に保存する(ST902)。
Δθ = θ − θ1 (式4)
そして、調整値演算部111は、記憶部112に保存された調整値テーブルから、差分Δθに対応するパルス数Pn2を読み出す(ST903)。ここで、記憶部112に保存される調整値テーブルT2の具体例について説明する。図9Bに示すように、調整値テーブルT2には、傾斜角の差分Δθに応じたパルス数Pn2が定められている。例えば、差分Δθが−0.6度(+0.6度)の場合には、パルス数Pn2として+6パルス(−6パルス)が関連付けられている。また、差分Δθが−0.1度(+0.1度)の場合には、パルス数Pn2として+1パルス(−1パルス)が関連付けられている。
最後に、調整値演算部111は、読み出したパルス数Pn2を、ギヤードモータ682を構成する2つのステッピングモータの一方に出力する(ST904)。該当するステッピングモータは、調整値演算部111から与えられたパルス数Pn2だけ駆動し、第1支持部材691又は第2支持部材692を前後方向に移動する。これにより、第1支持部材691に連結された連結アーム693の角度が変更され、固定板66の傾斜角度が調整される。この結果、サドル6の角度が調整される。
このような一連のサドル6の位置調整動作が運転している間、繰り返し実行される。これにより、傾斜センサ102で検出された走行路の傾斜角度に応じてサドル6の前後方向の位置及び角度が自動的に調整される。このため、運転者にサドル6の位置等の調整作業を要求することなく、走行路の傾斜角度に応じてサドル6の前後方向の位置及び角度を調整することができる。
特に、位置調整機構602を用いてサドル6の位置等を調整する場合には、第1支持部材691及び第2支持部材692の位置に応じてサドル6の前後方向の位置及び角度が調整されることから、上述した位置調整機構601と比べて、サドル6の前後方向の位置及び角度を細かく調整することができる。
以上説明したように、本実施の形態に係る位置調整システム100においては、走行路の傾斜角度に応じて演算された調整値を用いて位置調整機構601(602)によりサドル6の前後方向の位置及び角度が調整される。このため、走行路の傾斜角度に応じてサドル6の前後方向の位置及び角度が調整される一方、運転者におけるサドル6の位置等の調整作業が不要となる。したがって、運転者に煩雑な作業負担を要求することなく、走行路の傾斜角度に応じてサドル6の前後方向の位置及び角度を調整することができる。この結果、走行路の傾斜角度に応じて運転者が運転し易い位置にサドル6を配置することが可能となる。
特に、本実施の形態に係る位置調整システム100においては、走行路の傾斜角度を検出する傾斜センサ102を備えている。このため、走行路の傾斜角度を検出する外部端末等の接続作業を必要とすることなく、システム単独で走行路の傾斜角度に応じてサドル6の前後方向の位置及び角度を調整することができる。これにより、外部端末で走行路の傾斜角度を検出する場合と比べてより簡単にサドル6の前後方向の位置及び角度を調整することができる。
なお、本発明は上記実施の形態に限定されず、種々変更して実施することが可能である。上記実施の形態において、添付図面に図示されている大きさや形状などについては、これに限定されず、本発明の効果を発揮する範囲内で適宜変更することが可能である。その他、本発明の目的の範囲を逸脱しない限りにおいて適宜変更して実施することが可能である。
例えば、上記実施の形態においては、調整値演算部111が走行路の傾斜角θ及び運転者の膝下長aに基づいてサドル移動量bを算出する場合について説明している。しかしながら、調整値演算部111が参照する運転者の身体の一部については、膝下長aに限定されるものではなく適宜変更が可能である。上述したような本発明に係る位置調整システム100の趣旨を逸脱しない場合において、膝下長aに加えて、或いは、膝下長aに代えて他の部位(例えば、大腿部)の寸法を参照することができる。この場合には、運転者にとって適切な前後方向の位置及び角度にサドルを配置することができる。
また、上記実施の形態においては、位置調整機構602の駆動機構68を構成するギヤードモータ682が2つのステッピングモータを備え、それぞれボールネジ構造部683、684に駆動力を供給する場合について説明している。しかしながら、ギヤードモータ682の構成については、これに限定されるものではなく適宜変更が可能である。例えば、単一のステッピングモータを備え、このステッピングモータからギヤを介してボールネジ構造部683、684に駆動力を供給するようにしてもよい。
また、上記実施の形態においては、位置調整システム100が傾斜センサ102、入力手段104、表示手段105などの構成要素を備える場合について示している。しかしながら、位置調整システム100の構成については、これに限定されるものではなく適宜変更が可能である。例えば、傾斜センサ102、入力手段104、表示手段105の一部の機能を外部端末200で実現するようにしてもよい。この場合、外部端末200と制御手段101との間は、有線又は無線接続することができる。このように変更する場合には、自転車1に最低限の機能を備えておくだけで上述した効果を奏することが可能となる。