JP2011004467A - モータおよびそれを用いた電子機器 - Google Patents
モータおよびそれを用いた電子機器 Download PDFInfo
- Publication number
- JP2011004467A JP2011004467A JP2009143536A JP2009143536A JP2011004467A JP 2011004467 A JP2011004467 A JP 2011004467A JP 2009143536 A JP2009143536 A JP 2009143536A JP 2009143536 A JP2009143536 A JP 2009143536A JP 2011004467 A JP2011004467 A JP 2011004467A
- Authority
- JP
- Japan
- Prior art keywords
- extension
- substrate
- magnet
- motor
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/225—Detecting coils
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
Landscapes
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Brushless Motors (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Abstract
【課題】高い駆動効率を確保しながら、FG信号に重畳されるノイズを低減し、回転速度検出精度を向上する。
【解決手段】複数の磁極13aを備えたステータ13の周囲に、ロータ14が回転自在に配置されている。ロータのロータフレーム14bの内周面には、ステータに対向する方向に交互に異極に着磁され、更に、基板に対向する方向に交互に異極に着磁された磁石15を備える。ステータの磁極の外周端には、磁極基部13dに対して基板11側に延びた第1延長部13cと、磁極基部に対して基板とは反対側に延びた第2延長部13bとが設けられている。基板のロータに対向する面にFGパターン19が設けられている。ロータフレームの基板側端と基板との距離A、第1延長部の基板側端と基板との距離B、第1延長部の基板側端と磁石との距離GがB≦A≦B+Gを満足する。
【選択図】図1
【解決手段】複数の磁極13aを備えたステータ13の周囲に、ロータ14が回転自在に配置されている。ロータのロータフレーム14bの内周面には、ステータに対向する方向に交互に異極に着磁され、更に、基板に対向する方向に交互に異極に着磁された磁石15を備える。ステータの磁極の外周端には、磁極基部13dに対して基板11側に延びた第1延長部13cと、磁極基部に対して基板とは反対側に延びた第2延長部13bとが設けられている。基板のロータに対向する面にFGパターン19が設けられている。ロータフレームの基板側端と基板との距離A、第1延長部の基板側端と基板との距離B、第1延長部の基板側端と磁石との距離GがB≦A≦B+Gを満足する。
【選択図】図1
Description
本発明は、モータとそれを用いた電子機器に関する。
電子機器、例えばレーザプリンタでは、本体ケース内に設けられた紙送り用ローラ(被駆動体)は、減速機構を介してモータの駆動軸に連結され、このモータを駆動することにより回動し、紙を所定部分に送る。
上記モータとしては、外周に複数の磁極が第一の所定間隔で配置されたステータと、このステータの周囲に回転自在に配置されたロータとを備え、このロータの内周面に、第二の所定間隔ごとに異極に着磁(メイン着磁)された磁石が設けられたブラシレスDCモータが一般的に用いられる。
このようなモータにおいては、通常、ロータの回転を磁気的に検出する磁気検出素子にロータの磁石をできるだけ近接させるため、モータ駆動軸と平行な方向における磁石の寸法をステータの磁極基部の同方向における寸法よりも大きく設定される。この場合、ステータの磁極の外周端に、その磁極基部の両側に、磁石と略平行方向に延びたエンドプレートと呼ばれる延長部が形成されることが多い(例えば特許文献1,2参照)。これにより、ロータの磁石とステータの磁極との対向面積が大きくなるので、モータの駆動力及び駆動効率を向上させることができる。
また、レーザプリンタの紙送り用ローラを減速機構を介して駆動する場合などでは、ブラシレスDCモータの回転を精密に制御する必要がある。このため、ブラシレスDCモータの回転速度をある程度の分解能で検出する必要がある。
このような用途に適した速度検出方法として、一般的に以下に説明するFG方式が用いられている。即ち、ロータの磁石に、トルクを発生させるための着磁(メイン着磁)とは別に、磁石の基板と対向する面に、基板に対向する方向に多極着磁(FG着磁)を施し、基板にはFG着磁の着磁極数と同数の線素を直列に接続したFGパターンを円周方向に設ける。ロータが回転すると、FG着磁による磁束によってこの線素に誘起電圧が発生し、モータの回転数に比例した周波数の速度検出信号(FG信号)をこのFGパターンを通じて得ることが出来る。
このようなFG方式では、メイン着磁による磁束の影響を受けにくくするために、FGパターンをメインパターンとキャンセルパターンとで構成し、メインパターンとキャンセルパターンとを直列に接続することにより、メイン着磁による磁束の影響をキャンセルする方法が知られている(例えば特許文献3参照)。
しかしながら、ステータの磁極の外周端に磁石と略平行方向に延びた延長部を設けると、上記FG方式においてメイン着磁による磁束の影響をキャンセルすることが困難となる恐れがあった。理由は以下の通りである。
磁極の外周端に設けられた延長部は集磁効果を有しているので、メイン着磁による磁束の多くが延長部に引き込まれる。しかしながら、延長部に流入した磁束の一部は、延長部の磁気飽和によって、延長部の周囲に漏れ出し、漏れ磁束となる。この漏れ磁束は、FGパターンのうちステータに近い部分(即ち、半径方向においてFGパターンの内周側の部分)に強い影響を及ぼす。従って、メイン着磁の漏れ磁束の影響が、半径方向において、FGパターンのうちステータに近い部分とステータから遠い部分とで異なり、メイン着磁による磁束の影響を十分にキャンセルすることができない。その結果、FG信号にノイズが重畳され、回転速度検出精度が低下するのである。
本発明は、上記の従来の問題を解決し、ステータの磁極の外周端に延長部を設けたモータにおいて、高い駆動効率を確保しながら、FG信号に重畳されるノイズを低減し、回転速度検出精度を向上することを目的とする。
本発明のモータは、基板に搭載され、外周に複数の磁極が第一の所定間隔で配置されたステータと、前記ステータの周囲に回転自在に配置されたロータとを備える。前記ロータは、ロータフレームと前記ロータフレームの内周面に設けられた磁石とを備える。前記磁石は、前記ステータに対向する方向に第二の所定間隔ごとに異極に着磁され、且つ、前記基板に対向する方向に第三の所定間隔ごとに異極に着磁されている。前記ステータの前記複数の磁極のそれぞれの外周端には、磁極基部に対して前記基板側に延びた第1延長部と、前記磁極基部に対して前記基板とは反対側に延びた第2延長部とが設けられている。前記基板の前記ロータに対向する面には、前記磁石と略対向する位置に、メインパターン及びキャンセルパターンからなるFGパターンが設けられている。前記ロータフレームの前記基板側端と前記基板との距離をA、前記第1延長部の前記基板側端と前記基板との距離をB、前記第1延長部の前記基板側端と前記磁石との距離をGとしたとき、B≦A≦B+Gを満足することを特徴とする。
本発明の電子機器は、本体ケースと、前記本体ケース内に設けられた被駆動体と、前記被駆動体に連結されたモータとを備えた電子機器であって、前記モータが上記の本発明のモータであることを特徴とする。
本発明のモータは、ステータの磁極の外周端に、第1及び第2延長部を有しているので、メイン着磁による磁束に対する集磁効果が高められ、高い駆動効率を実現できる。
そして、B≦A≦B+Gを満足するので、第1延長部に流入したメイン着磁による磁束の漏れ磁束が、FGパターンの内周側の部分と外周側の部分とに及ぼす影響をほぼ均一化することができる。これにより、この漏れ磁束の影響を、メインパターンとキャンセルパターンとの間でキャンセルすることができる。従って、FG信号に重畳されるノイズが低減され、FGパターンを用いた回転速度検出精度を向上することができる。
よって、本発明によれば、第1及び第2延長部を設けたことにより効率よい駆動を維持しながら、FG信号を利用して回転速度検出精度が向上したモータを提供することができる。
本発明の電子機器は、上記の本発明のモータを用いて被駆動体を駆動するので、被駆動体を高効率且つ高精度で駆動することができる。
本発明の上記モータにおいて、前記第1延長部の前記基板側端に近いほど前記磁石までの距離が大きくなるように、前記第1延長部は傾斜していても良い。あるいは、前記第1延長部を構成する板状体の層数が、前記第2延長部を構成する板状体の層数よりも少なくても良い。あるいは、前記第1延長部が複数の板状体からなり、前記複数の板状体のうち前記磁石に最も近接した板状体は、他の板状体に比べて、前記磁極基部からの高さが低くても良い。あるいは、前記第1延長部の前記磁極基部からの高さは、前記第2延長部の前記磁極基部からの高さよりも低くても良い。これらにより、FGパターンのうち第1延長部に近い部分と遠い部分とで、メイン着磁による磁束の第1延長部からの漏れ磁束の影響を更に均一化することができる。この結果、FG信号に重畳されるノイズが更に低減され、FGパターンを用いた回転速度検出精度を更に向上することができる。
上記において、前記磁石の前記基板側の端部は、前記第1延長部の前記基板側端よりも、前記基板側に突出していることが好ましい。これにより、第1延長部と第2延長部とが非対称であるために生じる磁気センタのずれを補正することができるので、回転精度の悪化や騒音・振動の発生を抑制することができる。
以下、本発明を好適なの実施の形態を用いて説明する。但し、本発明は以下の実施の形態に限定されないことは言うまでもない。
(実施の形態1)
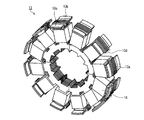
図1は、本発明の実施の形態1に係るモータ12の概略構成を示した断面図である。モータ12の断面図は駆動軸18に対してほぼ対称であるので、図1では駆動軸18に対して片側のみを図示している。図2は、本実施の形態1に係るモータ12を構成するステータ13の斜視図である。図3は、本実施の形態1に係るモータ12に設けられたFGパターン19の平面図である。図3では第1象限内のFGパターン19のみを図示している。
図1は、本発明の実施の形態1に係るモータ12の概略構成を示した断面図である。モータ12の断面図は駆動軸18に対してほぼ対称であるので、図1では駆動軸18に対して片側のみを図示している。図2は、本実施の形態1に係るモータ12を構成するステータ13の斜視図である。図3は、本実施の形態1に係るモータ12に設けられたFGパターン19の平面図である。図3では第1象限内のFGパターン19のみを図示している。
以下の説明では、モータ12の駆動軸18の方向を上下方向とし、図1において紙面の上側及び下側をそれぞれモータ12の「上側」及び「下側」と呼ぶ。
図1に示すように、本実施の形態1のモータ12は、配線基板(基板)11に取付け具21を介して搭載されたステータ13と、ステータ13の周囲に配置されたロータ14とを備える。ロータ14は、鉄などの高透磁率の材料からなる円筒形状のロータフレーム14bを有し、ロータフレーム14bの上端に天板14aが固定され、ロータフレーム14bの下端は開放されている。取り付け具21の内周面に複数のベアリング17が設けられている。モータ12の駆動軸18は、複数のベアリング17を貫通し、駆動軸18の上端はロータ14の天板14aに固定されている。その結果、ロータ14及び駆動軸18は、複数のベアリング17を介してステータ13に対して回転自在である。ロータフレーム14bの内周面にはリング状の磁石15が固定されている。磁石15のステータ13に対向する面は、ステータ13に対向する方向(半径方向)に所定間隔ごとにN極とS極とが交互に(隣接極が異極となるように)着磁(メイン着磁)されている。更に、メイン着磁とは別に、磁石15の配線基板11に対向する面は、配線基板11に対向する方向(上下方向)に所定間隔ごとにN極とS極とが交互に多極着磁(FG着磁)されている。
ステータ13は、同一厚さの複数の板状体(例えば高透磁率薄鋼板)が積層された積層体を含む。ステータ13の外周には、図2に示すように、複数の磁極13aが周方向に所定間隔で配置されている。各磁極13aの内側の磁気回路が形成される部分(磁路13e、図1参照)には、電磁石用のコイル16が巻回されている。コイル16に交流電力を印加することで、各磁極13aはN極とS極とに交互に着磁される。これにより、互いに対向する磁極13aと磁石15との間で吸引力と反発力が発生し、ロータ14が駆動軸18を中心に回転し、駆動軸18を介して回転駆動力が出力される。
配線基板11には、FGパターン19が設けられている。図3に示すように、FGパターン19は、メイン着磁の影響を受けにくくするために、ジグザグ状のメインパターン19aと円形のキャンセルパターン19bとで構成されており、メインパターン19aとキャンセルパターン19bとは直列に接続されている。なお、メインパターン19a及びキャンセルパターン19bの構成は、図3に限定されず、これ以外の任意の構成を有していても良い。また、メインパターン19aがキャンセルパターン19bよりも内側(駆動軸18側)に配置されていてもよい。
磁石15のFG着磁による磁束がFGパターン19により多く鎖交するほど、FGパターン19から出力されるFG信号のS/N比が改善される。したがって、本実施の形態では、FGパターン19は、図1に示されるように、配線基板11の上面(ロータ14に対向する面)に、磁石15と略対向する位置に設けられる。更に、磁石15とFGパターン19とをできるだけ接近させるために、磁石15の配線基板11側の端部(即ち、磁石15の下端)を配線基板11の近傍にまで延長している。
その結果、磁石15の上下方向寸法は大きくなり、これに合わせるごとく、ステータ13の各磁極13aの外周端には、中央の磁極基部13dに対して配線基板11側(下側)に延びた第1延長部13cと、磁極基部13dに対して配線基板11とは反対側(上側、即ち、天板14a側)に延びた第2延長部13bとが設けられている。第1延長部13c及び第2延長部13bは、磁石15と実質的に平行、即ち、駆動軸18の軸線方向と実質的に平行である。より詳細には、第1延長部13cは、ステータ13を構成する積層された複数層の板状体のうち最下層を含む下側の2層の外周部分を下向きに略直角に折り曲げることにより形成されており、第2延長部13bは、ステータ13を構成する積層された複数層の板状体のうち最上層を含む上側の2層の外周部分を上向きに略直角に折り曲げることにより形成されている。但し、第1及び第2延長部13c,13bを構成する板状体の層数は2層に限定されず、1層又は3層以上であってもよい。
このように磁極13aの外周端に、磁極基部13dの上下に第1延長部13c及び第2延長部13bを設けることにより、磁極13aと上下方向に延長された磁石15との対向面積は図1のように大きくなる。第1延長部13c及び第2延長部13bは集磁効果を有するので、ステータ13に引き込まれるメイン着磁による磁束が増大し、モータ12の駆動力及び駆動効率が向上する。第1延長部13c及び第2延長部13bは一般にエンドプレートと呼ばれる。
本発明では、図1に示すように、ロータフレーム14bの配線基板11側端(即ち、下端)と配線基板11との距離(駆動軸18と平行な方向に沿った距離)をA、第1延長部13cの配線基板11側端と配線基板11との距離(駆動軸18と平行な方向に沿った距離)をB、第1延長部13cの配線基板11側端と磁石15との距離(半径方向に沿った距離)をGとしたとき、B≦A≦B+Gを満足する。これによる作用を以下に説明する。
図4は本実施の形態1に係るモータ12において、FGパターン19の近傍での磁束の流れを矢印で簡略化して示した断面図である。図5は、従来のモータ12’において、FGパターン19の近傍での磁束の流れを矢印で簡略化して示した断面図である。図5に示す従来のモータ12’は、A>B+Gである点で、本実施の形態1のモータ12と異なる。
本実施の形態1のモータ12及び従来のモータ12’のいずれにおいても、メイン着磁による磁束が、延長部13b,13cに、その集磁効果によって集められる。集められた磁束のほとんどは延長部13b,13c内を通り、磁極13aの磁路13eに向かう。しかし、延長部13b,13cが磁気飽和することにより、一部の磁束は延長部13b,13cから漏れ出して漏れ磁束となる。漏れ磁束は、延長部13b,13cの厚みを厚くすれば低減することは可能であるが、完全にゼロにすることは不可能である。更に、延長部13b,13cは周方向に所定間隔で配置されているので、延長部13b,13cがある部分とない部分とでは、メイン着磁による磁束の集磁効果が異なり、その結果、延長部13b,13cからの漏れ磁束は不均一となる。
従来のモータ12’では、図5に示すように、ロータフレーム14bの配線基板11側端と配線基板11との距離Aが大きい。従って、メイン着磁による磁束の第1延長部13cからの漏れ磁束の影響度合いは、FGパターン19のうち第1延長部13cから遠い部分(例えばメインパターン19aの外側部分)に比べて、FGパターン19のうち第1延長部13cに近い部分(例えばキャンセルパターン19b)において大きい。よって、メイン着磁による磁束の影響を、メインパターン19aとキャンセルパターン19bとで十分にキャンセルすることができず、FG信号にノイズが重畳されてしまう。
これに対して、本実施の形態1のモータ12では、図4に示すように、B≦A≦B+Gを満足する。これにより、磁石15から第1延長部13cを通りFGパターン19に至る磁路と、磁石15からロータフレーム14bを通りFGパターン19に至る磁路とがバランスする。従って、メイン着磁による磁束の第1延長部13cからの漏れ磁束の影響度合いは、FGパターン19のうち第1延長部13cに近い部分(例えばキャンセルパターン19b)と、遠い部分(例えばメインパターン19aの外側部分)とでほぼ均一化される。従って、第1延長部13cから発生した漏れ磁束の影響を、メインパターン19aとキャンセルパターン19bとでキャンセルすることが可能となり、FG信号に重畳されるノイズが低減され、FGパターン19を用いた回転速度検出精度を向上することができる。
本実施の形態1のモータ12及び従来のモータ12’において、メイン着磁による磁束がメインパターン19a及びキャンセルパターン19bに及ぼす影響を磁界解析により確認した。解析方法は以下の通りである。ロータ14が回転したときにメイン着磁による磁束によってFGパターン19を構成するメインパターン19a及びキャンセルパターン19bにそれぞれ発生する誘起電圧を周波数解析した。そして、メインパターン19aに発生する誘起電圧に含まれるノイズ成分の電圧と、キャンセルパターン19bに発生する誘起電圧とを求め、更に、これらをキャンセルした後に残存するノイズ成分の電圧を求めた。結果を表1に示す。

表1より、B≦A≦B+Gを満足する本実施の形態1のモータ12(「本発明品」)は、A>B+Gである従来のモータ12’(「従来品」)に比べて、ノイズ成分の電圧値が低い。したがって、本実施の形態1のモータ12では、メインパターン19aとキャンセルパターン19bとの間でメイン着磁による磁束の影響をキャンセルすることで、FG信号に重畳されるノイズ成分を低減することができ、その結果、高精度な回転速度検出が可能となることを確認できた。
図1に示すように、FGパターン19の半径方向の中央位置P19と、磁石15の半径方向の中央位置P15との半径方向における位置が同一であることが好ましい。これにより、半径方向において、FGパターン19のうち内周側の部分(第1延長部13cに近い部分)と、外周側の部分(第1延長部13cから遠い部分)とで、メイン着磁による磁束の第1延長部13cからの漏れ磁束の影響がより均一化される。従って、第1延長部13cから発生した漏れ磁束によってFG信号に重畳されるノイズが更に低減され、FGパターン19を用いた回転速度検出精度を更に向上することができる。
(実施の形態2)
図6は、本発明の実施の形態2に係るモータの概略構成を示した断面図である。図1と同様に、図6では駆動軸18に対して片側のみを図示している。図6において図1と同じ部材には同一の符号を付している。
図6は、本発明の実施の形態2に係るモータの概略構成を示した断面図である。図1と同様に、図6では駆動軸18に対して片側のみを図示している。図6において図1と同じ部材には同一の符号を付している。
本実施の形態2では、図6に示すように、第1延長部13cは、ステータ13を構成する複数層の板状体のうちの下側の2層を直角よりも大きな角度で折り曲げて形成されている点で実施の形態1と異なる。その結果、第1延長部13cは、その配線基板11側端13c1に近づくにしたがって磁石15までの距離(半径方向に沿った距離)が大きくなるように傾斜している。一方、第2延長部13bは、ステータ13を構成する複数層の板状体のうちの上側の2層を、実施の形態1と同様に略直角に折り曲げて形成されている。但し、第1及び第2延長部13c,13bを構成する板状体の層数は2層に限定されず、1層又は3層以上であってもよい。
第1延長部13cを上記のように傾斜させることにより、第1延長部13cの配線基板11側端13c1と磁石15との距離Gが大きくなる。これにより、A≦B+Gを満足する構成を容易に実現することができる。従って、FGパターン19のうち第1延長部13cに近い部分と遠い部分とで、メイン着磁による磁束の第1延長部13cからの漏れ磁束の影響を、実施の形態1に比べて更に均一化することができる。この結果、FG信号に重畳されるノイズが更に低減され、FGパターン19を用いた回転速度検出精度を更に向上することができる。
本実施の形態2では、第1延長部13cと第2延長部13bとは、磁極基部13dに対して断面形状が非対称であるので、磁気センタがステータ13の上下方向の中心位置からずれる。従って、ステータ13の上部と下部とでは磁石15に対する吸引力及び反発力も非対称となり、回転精度の悪化や騒音・振動の発生などが懸念される。
このため、本実施の形態2では、磁石15の下端(配線基板11側の端部)を、第1延長部13cの下端13c1よりも配線基板11側に突出させている。なお、磁石15の上端(天板14a側の端部)は、第2延長部13bの上端13b1と、上下方向においてほぼ同一位置にある。したがって、図6に示すように、ステータ13の上下方向の中心線A−A’から磁石15の上端までの距離Lbに比べて、中心線A−A’から磁石15の下端までの距離Lcは長い。
このように、配線基板11側で磁石15を第1延長部13cよりもオーバーハングさせることにより、第1延長部13cと第2延長部13bとで磁束量が異なることにより生じる磁気センタのずれを補正することができる。したがって、第1延長部13cと第2延長部13bとが非対称であることによる回転精度の悪化や騒音・振動の発生を抑制することができる。なお、磁気センタのずれの補正は、例えばパーミアンス計算により、中心線A−A’より上側の距離Lbの部分での平均ギャップと中心線A−A’より下側の距離Lcの部分での平均ギャップとの間の磁束量の相違を比較することで行うことができる。
本実施の形態2は、上記以外は実施の形態1と同様である。
(実施の形態3)
図7は、本発明の実施の形態3に係るモータの概略構成を示した断面図である。図1と同様に、図7では駆動軸18に対して片側のみを図示している。図7において図1と同じ部材には同一の符号を付している。
図7は、本発明の実施の形態3に係るモータの概略構成を示した断面図である。図1と同様に、図7では駆動軸18に対して片側のみを図示している。図7において図1と同じ部材には同一の符号を付している。
本実施の形態3では、図7に示すように、配線基板11側の第1延長部13cを構成する板状体の層数は、ロータ14の天板14a側の第2延長部13bを構成する板状体の層数よりも少ない点で実施の形態1と異なる。具体的には、第1延長部13cは、ステータ13を構成する複数層の板状体のうち最下層の1層の板状体を下向きに磁石15と略平行になるように折り曲げることにより形成されており、第2延長部13bは、ステータ13を構成する複数層の板状体のうち最上層を含む上側の2層の板状体を上向きに磁石15と略平行になるように折り曲げることにより形成されている。最下層の板状体の折り曲げ位置と最上層の板状体の折り曲げ位置とは、半径方向においてほぼ同一である。
但し、第1延長部13c及び第2延長部13bを構成する板状体の層数はこれに限定されない。例えば、第1延長部13cを2層の板状体で構成し、第2延長部13bを3層の板状体で構成してもよい。
上記のように第1延長部13cを第2延長部13bよりも少ない板状体で構成することにより、第1延長部13cの配線基板11側端13c1と磁石15との距離Gが大きくなる。これにより、A≦B+Gを満足する構成を容易に実現することができる。従って、FGパターン19のうち第1延長部13cに近い部分と遠い部分とで、メイン着磁による磁束の第1延長部13cからの漏れ磁束の影響を、実施の形態1に比べて更に均一化することができる。この結果、FG信号に重畳されるノイズが更に低減され、FGパターン19を用いた回転速度検出精度を更に向上することができる。
本実施の形態3でも、実施の形態2と同様に、ステータ13の上下方向の中心線A−A’から磁石15の上端までの距離Lbに比べて、中心線A−A’から磁石15の下端までの距離Lcが長くなるように、磁石15の下端を、第1延長部13cの下端13c1よりも配線基板11側に突出させることが好ましい。これにより、回転精度の悪化や騒音・振動の発生を抑制することができる。
本実施の形態3は、上記以外は実施の形態1と同様である。
(実施の形態4)
図8は、本発明の実施の形態4に係るモータの概略構成を示した断面図である。図1と同様に、図8では駆動軸18に対して片側のみを図示している。図8において図1と同じ部材には同一の符号を付している。
図8は、本発明の実施の形態4に係るモータの概略構成を示した断面図である。図1と同様に、図8では駆動軸18に対して片側のみを図示している。図8において図1と同じ部材には同一の符号を付している。
本実施の形態4では、図8に示すように、配線基板11側の第1延長部13cを構成する複数の板状体のそれぞれの磁極基部13dからの高さ(上下方向距離)は、磁石15から遠い板状体ほど高い。具体的には、第1延長部13cは、ステータ13を構成する複数層の板状体のうち最下層を含む下側の2層の板状体を下向きに磁石15と略平行になるように折り曲げることにより形成されている。そして、磁極基部13dから、折り曲げられた2層の板状体のそれぞれの下端までの距離は、磁石15から遠い板状体(最下層の板状体)の方が、近い板状体よりも長い。このような構成は、例えば、第1延長部13cを構成する2層の板状体を同一寸法として、その外周部分を配線基板11側に単に折り曲げるだけで実現できる。したがって、第1延長部13cを構成する2層の板状体を同一金型を用いて同一形状に形成できるので、生産効率が向上する。
天板14a側の第2延長部13bを構成する複数の板状体のそれぞれの磁極基部13dからの高さ(上下方向距離)は、実施の形態1〜3と同様に、同じである。
なお、第1延長部13c及び第2延長部13bを構成する板状体の層数は上記に限定されない。第1延長部13cが複数の板状体で構成されていればよい。また、第1延長部13cを構成する複数の板状体の磁極基部13dからの高さは全て異なっている必要はない。第1延長部13cを構成する複数の板状体のうち磁石15に最も近接した板状体が、他の板状体に比べて、磁極基部13cからの高さが低ければよい。
上記のように、第1延長部13cを構成する複数の板状体のうち磁石15に最も近接した板状体を低くすることにより、第1延長部13cの配線基板11側端13c1と磁石15との距離Gが大きくなる。これにより、A≦B+Gを満足する構成を容易に実現することができる。従って、FGパターン19のうち第1延長部13cに近い部分と遠い部分とで、メイン着磁による磁束の第1延長部13cからの漏れ磁束の影響を、実施の形態1に比べて更に均一化することができる。この結果、FG信号に重畳されるノイズが更に低減され、FGパターン19を用いた回転速度検出精度を更に向上することができる。
本実施の形態4でも、実施の形態2,3と同様に、ステータ13の上下方向の中心線A−A’から磁石15の上端までの距離Lbに比べて、中心線A−A’から磁石15の下端までの距離Lcが長くなるように、磁石15の下端を、第1延長部13cの下端13c1よりも配線基板11側に突出させることが好ましい。これにより、回転精度の悪化や騒音・振動の発生を抑制することができる。
本実施の形態4は、上記以外は実施の形態1と同様である。
(実施の形態5)
図9は、本発明の実施の形態5に係るモータの概略構成を示した断面図である。図1と同様に、図9では駆動軸18に対して片側のみを図示している。図9において図1と同じ部材には同一の符号を付している。
図9は、本発明の実施の形態5に係るモータの概略構成を示した断面図である。図1と同様に、図9では駆動軸18に対して片側のみを図示している。図9において図1と同じ部材には同一の符号を付している。
本実施の形態5では、図9に示すように、第1延長部13cの磁極基部13dからの高さ(上下方向距離)は、第2延長部13bの磁極基部13dからの高さ(上下方向距離)よりも低い。
上記のように第1延長部13cを第2延長部13bよりも低くすることにより、第1延長部13cの配線基板11側端13c1と配線基板11との距離Bが大きくなる。これにより、距離Bに応じて距離Aを大きくすれば、B≦A≦B+Gを満足する構成を容易に実現することができる。従って、FGパターン19のうち第1延長部13cに近い部分と遠い部分とで、メイン着磁による磁束の第1延長部13cからの漏れ磁束の影響を、実施の形態1に比べて更に均一化することができる。この結果、FG信号に重畳されるノイズが更に低減され、FGパターン19を用いた回転速度検出精度を更に向上することができる。
本実施の形態5でも、実施の形態2〜4と同様に、ステータ13の上下方向の中心線A−A’から磁石15の上端までの距離Lbに比べて、中心線A−A’から磁石15の下端までの距離Lcが長くなるように、磁石15の下端を、第1延長部13cの下端13c1よりも配線基板11側に突出させることが好ましい。これにより、回転精度の悪化や騒音・振動の発生を抑制することができる。
本実施の形態5は、上記以外は実施の形態1と同様である。
上述した実施の形態2〜5のうちの2以上を適宜組み合わせても良い。
(実施の形態6)
図10は、本発明のモータを用いた電子機器の一例の概略構成を示した図である。図10において、電子機器61は、本体ケースとしての筐体62と、筐体62内に搭載される電動機67と、電動機67を駆動するための駆動器65と、駆動器65に給電するための電源68と、電動機67を動力源として駆動される機構部等の負荷(被駆動体)69とを含んでいる。ここで、電動機67と駆動器65とで電動機駆動装置63が構成される。電動機67は、電源68から電力供給を受けて駆動器65を介して駆動される。電動機67の駆動軸を介して負荷69に回転トルクが伝達される。電動機67として、本発明のモータ12を用いることができる。
図10は、本発明のモータを用いた電子機器の一例の概略構成を示した図である。図10において、電子機器61は、本体ケースとしての筐体62と、筐体62内に搭載される電動機67と、電動機67を駆動するための駆動器65と、駆動器65に給電するための電源68と、電動機67を動力源として駆動される機構部等の負荷(被駆動体)69とを含んでいる。ここで、電動機67と駆動器65とで電動機駆動装置63が構成される。電動機67は、電源68から電力供給を受けて駆動器65を介して駆動される。電動機67の駆動軸を介して負荷69に回転トルクが伝達される。電動機67として、本発明のモータ12を用いることができる。
電子機器61として、例えばレーザプリンタを例示することができる。この場合、負荷69としては紙送り用ローラが該当する。本発明のモータ12は、レーザプリンタの本体ケース内において、水平方向に配置された配線基板11上に、各種の電子部品とともに載置されていても良い。モータ12の、配線基板11を貫通して下側に延びた駆動軸18の下部に歯車(図示せず)を固定し、この歯車と、紙送り用ローラに設けられた歯車とを減速機構としてのギアボックス(図示せず)を介して連結することができる。本発明のモータ12は、高い駆動効率を有しながら、回転速度検出精度に優れているので、効率良く、回転ムラや騒音などが抑制された精度よい紙送りが可能となり、印字ずれ等のない精細な印刷が可能なレーザプリンタを実現することができる。
本発明によれば、効率よい駆動を維持しながら、回転速度検出精度が向上したモータを提供できるため、レーザプリンタやレーザ複写機などの電子機器に使用されるモータに好適である。但し、本発明のモータはこれらに限定されず、高い回転精度が要求されるモータとして広範囲に利用することができる。
11 配線基板
12 モータ
13 ステータ
13a 磁極
13b 第2延長部
13b1 第2延長部の上端
13c 第1延長部
13c1 第1延長部の下端(配線基板側端)
13d 磁極基部
13e 磁路
14 ロータ
14a 天板
14b ロータフレーム
15 磁石
16 コイル
17 ベアリング
18 駆動軸
19 FGパターン
19a メインパターン
19b キャンセルパターン
21 取り付け具
61 電子機器
62 筐体(本体ケース)
63 電動機駆動装置
65 駆動器
67 電動機
68 電源
69 負荷(被駆動体)
12 モータ
13 ステータ
13a 磁極
13b 第2延長部
13b1 第2延長部の上端
13c 第1延長部
13c1 第1延長部の下端(配線基板側端)
13d 磁極基部
13e 磁路
14 ロータ
14a 天板
14b ロータフレーム
15 磁石
16 コイル
17 ベアリング
18 駆動軸
19 FGパターン
19a メインパターン
19b キャンセルパターン
21 取り付け具
61 電子機器
62 筐体(本体ケース)
63 電動機駆動装置
65 駆動器
67 電動機
68 電源
69 負荷(被駆動体)
Claims (7)
- 基板に搭載され、外周に複数の磁極が第一の所定間隔で配置されたステータと、前記ステータの周囲に回転自在に配置されたロータとを備えたモータであって、
前記ロータは、ロータフレームと前記ロータフレームの内周面に設けられた磁石とを備え、
前記磁石は、前記ステータに対向する方向に第二の所定間隔ごとに異極に着磁され、且つ、前記基板に対向する方向に第三の所定間隔ごとに異極に着磁されており、
前記ステータの前記複数の磁極のそれぞれの外周端には、磁極基部に対して前記基板側に延びた第1延長部と、前記磁極基部に対して前記基板とは反対側に延びた第2延長部とが設けられ、
前記基板の前記ロータに対向する面には、前記磁石と略対向する位置に、メインパターン及びキャンセルパターンからなるFGパターンが設けられており、
前記ロータフレームの前記基板側端と前記基板との距離をA、前記第1延長部の前記基板側端と前記基板との距離をB、前記第1延長部の前記基板側端と前記磁石との距離をGとしたとき、B≦A≦B+Gを満足することを特徴とするモータ。 - 前記第1延長部の前記基板側端に近いほど前記磁石までの距離が大きくなるように、前記第1延長部は傾斜している請求項1に記載のモータ。
- 前記第1延長部を構成する板状体の層数が、前記第2延長部を構成する板状体の層数よりも少ない請求項1又は2に記載のモータ。
- 前記第1延長部が複数の板状体からなり、前記複数の板状体のうち前記磁石に最も近接した板状体は、他の板状体に比べて、前記磁極基部からの高さが低い請求項1〜3のいずれかに記載のモータ。
- 前記第1延長部の前記磁極基部からの高さは、前記第2延長部の前記磁極基部からの高さよりも低い請求項1〜4のいずれかに記載のモータ。
- 前記磁石の前記基板側の端部は、前記第1延長部の前記基板側端よりも、前記基板側に突出している請求項1〜5のいずれかに記載のモータ。
- 本体ケースと、前記本体ケース内に設けられた被駆動体と、前記被駆動体に連結されたモータとを備えた電子機器であって、前記モータが請求項1〜6のいずれかに記載のモータである電子機器。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009143536A JP2011004467A (ja) | 2009-06-16 | 2009-06-16 | モータおよびそれを用いた電子機器 |
| US12/813,166 US8159102B2 (en) | 2009-06-16 | 2010-06-10 | Motor and electronic apparatus using the same |
| CN201010206739XA CN101924448A (zh) | 2009-06-16 | 2010-06-13 | 马达以及使用了该马达的电子设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009143536A JP2011004467A (ja) | 2009-06-16 | 2009-06-16 | モータおよびそれを用いた電子機器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011004467A true JP2011004467A (ja) | 2011-01-06 |
Family
ID=43305824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009143536A Withdrawn JP2011004467A (ja) | 2009-06-16 | 2009-06-16 | モータおよびそれを用いた電子機器 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8159102B2 (ja) |
| JP (1) | JP2011004467A (ja) |
| CN (1) | CN101924448A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013255380A (ja) * | 2012-06-08 | 2013-12-19 | Panasonic Corp | モータおよびそれを備えた電気機器 |
| JP2017225319A (ja) * | 2016-06-17 | 2017-12-21 | 日本電産株式会社 | モータ |
| KR20180024121A (ko) * | 2016-08-28 | 2018-03-08 | 최세현 | 지우개 대패 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8368278B2 (en) * | 2007-11-15 | 2013-02-05 | Panasonic Corporation | Motor and electronic device comprising the same |
| JP2011010452A (ja) * | 2009-06-25 | 2011-01-13 | Panasonic Corp | モータおよびそれを用いた電子機器 |
| JP2011010451A (ja) * | 2009-06-25 | 2011-01-13 | Panasonic Corp | モータおよびそれを用いた電子機器 |
| JP2015047525A (ja) * | 2013-08-30 | 2015-03-16 | アルプス電気株式会社 | 振動発生装置 |
| CN103545998B (zh) * | 2013-10-10 | 2017-01-25 | 捷和电机制品(深圳)有限公司 | 一种外转子电机的转子及其制造方法 |
| JP7027795B2 (ja) * | 2017-10-19 | 2022-03-02 | 株式会社ジェイテクト | モータ装置 |
| CN111600405B (zh) * | 2019-02-21 | 2023-09-22 | 北京金风科创风电设备有限公司 | 磁极模块、转子、转子的装配方法及电机 |
| MX2021013243A (es) * | 2019-05-10 | 2022-01-24 | Deublin Company Llc | Sistema y método de monitoreo de condición de anillo colector de orificio pasante. |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62262645A (ja) * | 1986-05-09 | 1987-11-14 | Sanyo Electric Co Ltd | ブラシレスモ−タ |
| MY113834A (en) * | 1990-06-01 | 2002-06-29 | Mitsubishi Electric Corp | Electric motor |
| US5245234A (en) * | 1990-12-28 | 1993-09-14 | Nippon Densan Corporation | Motor |
| US5408153A (en) * | 1991-07-05 | 1995-04-18 | Canon Denshi Kabushiki Kaisha | Index position detecting apparatus for an electromagnetic rotary machine |
| KR0137920B1 (ko) * | 1993-02-10 | 1998-06-15 | 세끼모또 다다히로 | 스핀들 모터 |
| JPH0946938A (ja) * | 1995-07-26 | 1997-02-14 | Toshiba Corp | スピンドルモータ及びその製造方法、並びにスピンドルモータを備えた磁気ディスク装置 |
| JP3635148B2 (ja) | 1996-04-08 | 2005-04-06 | 日本電産シバウラ株式会社 | ブラシレスdcモータの固定子 |
| US6979931B1 (en) * | 2001-04-30 | 2005-12-27 | Western Digital Technologies, Inc. | Spindle motor having spindle motor stator with laminate layers for increased head stack assembly access |
| JP2002354768A (ja) * | 2001-05-24 | 2002-12-06 | Sankyo Seiki Mfg Co Ltd | モータ |
| JP4373130B2 (ja) * | 2003-05-23 | 2009-11-25 | アネスト岩田株式会社 | スクロール流体機械 |
| JP2006025537A (ja) * | 2004-07-08 | 2006-01-26 | Matsushita Electric Ind Co Ltd | ブラシレスモータ |
| US7327066B2 (en) * | 2005-03-01 | 2008-02-05 | Nidec Corporation | Motor and recording disk drive device provided with the same |
| JP2007244004A (ja) | 2006-02-08 | 2007-09-20 | Nippon Densan Corp | モータ及びそれを備える記録ディスク駆動装置 |
| JP5104179B2 (ja) * | 2007-10-09 | 2012-12-19 | パナソニック株式会社 | モータとそれを用いた電子機器 |
| JP2010041872A (ja) * | 2008-08-07 | 2010-02-18 | Panasonic Corp | モータおよびそれを備えた電子機器 |
-
2009
- 2009-06-16 JP JP2009143536A patent/JP2011004467A/ja not_active Withdrawn
-
2010
- 2010-06-10 US US12/813,166 patent/US8159102B2/en not_active Expired - Fee Related
- 2010-06-13 CN CN201010206739XA patent/CN101924448A/zh not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013255380A (ja) * | 2012-06-08 | 2013-12-19 | Panasonic Corp | モータおよびそれを備えた電気機器 |
| JP2017225319A (ja) * | 2016-06-17 | 2017-12-21 | 日本電産株式会社 | モータ |
| KR20180024121A (ko) * | 2016-08-28 | 2018-03-08 | 최세현 | 지우개 대패 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101924448A (zh) | 2010-12-22 |
| US8159102B2 (en) | 2012-04-17 |
| US20100314965A1 (en) | 2010-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011004467A (ja) | モータおよびそれを用いた電子機器 | |
| JP5211651B2 (ja) | モータおよびそれを用いた電子機器 | |
| KR101489024B1 (ko) | 모터와 이를 이용한 전자 기기 | |
| JP5546169B2 (ja) | モータとそれを用いた電子機器 | |
| JP2011010452A (ja) | モータおよびそれを用いた電子機器 | |
| KR101243503B1 (ko) | 모터 및 이를 구비한 전자 기기 | |
| JP5807143B2 (ja) | モータとそれを用いた電子機器 | |
| US20110001386A1 (en) | Motor and electronic apparatus using the same | |
| CN100554886C (zh) | 解算装置 | |
| JP5239305B2 (ja) | モータおよびそれを用いた電子機器 | |
| JP2008148447A (ja) | 電動パワーステアリング装置用モータ | |
| US8159106B2 (en) | Motor and electronic apparatus using the same | |
| WO2009081531A1 (ja) | モータとそれを用いた電子機器 | |
| JP2012165521A (ja) | ブラシレスモータ | |
| JP2006158034A (ja) | Dcブラシレスモータ | |
| JP2011010490A (ja) | ブラシレスモータおよびそれを用いた電子機器 | |
| JP2007068277A (ja) | ブラシレスdcモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120607 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20130130 |