JP2011004035A - 屈曲振動片および屈曲振動片の製造方法 - Google Patents
屈曲振動片および屈曲振動片の製造方法 Download PDFInfo
- Publication number
- JP2011004035A JP2011004035A JP2009143984A JP2009143984A JP2011004035A JP 2011004035 A JP2011004035 A JP 2011004035A JP 2009143984 A JP2009143984 A JP 2009143984A JP 2009143984 A JP2009143984 A JP 2009143984A JP 2011004035 A JP2011004035 A JP 2011004035A
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric film
- vibrating arm
- electrode
- bending vibration
- vibration piece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000004519 manufacturing process Methods 0.000 title claims abstract description 17
- 238000000034 method Methods 0.000 title abstract description 10
- 230000010287 polarization Effects 0.000 claims abstract description 42
- 238000005452 bending Methods 0.000 claims description 72
- 230000005684 electric field Effects 0.000 claims description 43
- 239000004065 semiconductor Substances 0.000 claims description 5
- 239000013078 crystal Substances 0.000 abstract description 60
- 239000010408 film Substances 0.000 description 214
- 229910052751 metal Inorganic materials 0.000 description 32
- 239000002184 metal Substances 0.000 description 32
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 30
- 239000010453 quartz Substances 0.000 description 29
- 239000010410 layer Substances 0.000 description 24
- 239000011651 chromium Substances 0.000 description 23
- 230000015572 biosynthetic process Effects 0.000 description 22
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 22
- 239000010931 gold Substances 0.000 description 20
- 239000010936 titanium Substances 0.000 description 19
- PIGFYZPCRLYGLF-UHFFFAOYSA-N Aluminum nitride Chemical compound [Al]#N PIGFYZPCRLYGLF-UHFFFAOYSA-N 0.000 description 11
- 229910052804 chromium Inorganic materials 0.000 description 11
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 10
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 10
- 229910052737 gold Inorganic materials 0.000 description 10
- 239000000463 material Substances 0.000 description 10
- 239000000758 substrate Substances 0.000 description 10
- 229910052719 titanium Inorganic materials 0.000 description 10
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 9
- 230000004048 modification Effects 0.000 description 8
- 238000012986 modification Methods 0.000 description 8
- 230000006835 compression Effects 0.000 description 7
- 238000007906 compression Methods 0.000 description 7
- 229910052697 platinum Inorganic materials 0.000 description 7
- 238000000059 patterning Methods 0.000 description 6
- 229910052782 aluminium Inorganic materials 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 238000004544 sputter deposition Methods 0.000 description 5
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 4
- 230000005685 electric field effect Effects 0.000 description 4
- 238000005546 reactive sputtering Methods 0.000 description 4
- WGTYBPLFGIVFAS-UHFFFAOYSA-M tetramethylammonium hydroxide Chemical compound [OH-].C[N+](C)(C)C WGTYBPLFGIVFAS-UHFFFAOYSA-M 0.000 description 4
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 3
- 230000003071 parasitic effect Effects 0.000 description 3
- 238000000206 photolithography Methods 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- 238000001039 wet etching Methods 0.000 description 3
- KRHYYFGTRYWZRS-UHFFFAOYSA-N Fluorane Chemical compound F KRHYYFGTRYWZRS-UHFFFAOYSA-N 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- PMHQVHHXPFUNSP-UHFFFAOYSA-M copper(1+);methylsulfanylmethane;bromide Chemical compound Br[Cu].CSC PMHQVHHXPFUNSP-UHFFFAOYSA-M 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 239000012528 membrane Substances 0.000 description 2
- 239000002356 single layer Substances 0.000 description 2
- 230000002269 spontaneous effect Effects 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 229910018072 Al 2 O 3 Inorganic materials 0.000 description 1
- 229910013641 LiNbO 3 Inorganic materials 0.000 description 1
- 229910052581 Si3N4 Inorganic materials 0.000 description 1
- 229910004298 SiO 2 Inorganic materials 0.000 description 1
- 238000010306 acid treatment Methods 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- QZPSXPBJTPJTSZ-UHFFFAOYSA-N aqua regia Chemical compound Cl.O[N+]([O-])=O QZPSXPBJTPJTSZ-UHFFFAOYSA-N 0.000 description 1
- 239000007864 aqueous solution Substances 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000001312 dry etching Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 229910052758 niobium Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 1
- 229910052814 silicon oxide Inorganic materials 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 229910052725 zinc Inorganic materials 0.000 description 1
- 239000011701 zinc Substances 0.000 description 1
- 229910052726 zirconium Inorganic materials 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/15—Constructional features of resonators consisting of piezoelectric or electrostrictive material
- H03H9/17—Constructional features of resonators consisting of piezoelectric or electrostrictive material having a single resonator
- H03H9/176—Constructional features of resonators consisting of piezoelectric or electrostrictive material having a single resonator consisting of ceramic material
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/15—Constructional features of resonators consisting of piezoelectric or electrostrictive material
- H03H9/21—Crystal tuning forks
Abstract
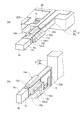
【解決手段】水晶振動片1は、基部2と、基部2から延長して形成され、屈曲振動するそれぞれの方向へ向いて配置された第1面6および第2面7を有する3本の振動腕3と、振動腕3の第1面6および第2面7に形成され相互に導電接続されている下部電極11,12と、下部電極11,12を覆って形成された圧電膜14と、圧電膜14に重ねて形成された上部電極10,13と、を備え、第1面6(6a,6b,6c)に形成された圧電膜14(14a1,14b1,14c1)と第2面7(7a,7b,7c)に形成された圧電膜14(14a2,14b2,14c2)とは、形成されている振動腕3に対して互いに反対の分極方向を有している。
【選択図】図1
Description
(実施形態)
尚、プラチナ以外に窒化アルミニウムの配向性を促す可能性のある金属膜としては、AU、Al、Ag、Cu、Mo、Cr、Nb、W、Ni、Fe、Ti、Co、Zn、Zr、などがある。
Claims (8)
- 基部と、
前記基部から延長して少なくとも1本形成され、第1面および該第1面に対向する第2面を有する振動腕と、
前記振動腕の前記第1面および前記第2面に形成された下部電極と、
前記下部電極に重ねて形成された圧電膜と、
前記圧電膜に重ねて形成された上部電極と、を備え、
前記第1面に形成された前記圧電膜と、前記第2面に形成された前記圧電膜とは、前記振動腕に対して互いに反対の分極方向を有していることを特徴とする屈曲振動片。 - 請求項1に記載の屈曲振動片において、
前記振動腕の前記第1面および前記第2面に形成された前記下部電極は、相互に導電接続されていて、前記第1面の側および前記第2面の側に形成された前記上部電極に駆動電圧が印加されることを特徴とする屈曲振動片。 - 基部と、
前記基部から延長して少なくとも1本形成され、第1面および該第1面に対向する第2面を有する振動腕と、
前記振動腕の前記第1面および前記第2面に形成された下部電極と、
前記下部電極に重ねて形成された圧電膜と、
前記圧電膜に重ねて形成された上部電極と、を備え、
前記下部電極と前記上部電極との間に駆動電圧を印加して電界を発生させたときに、前記第1面と前記第2面のどちらか一方の面に形成された前記圧電膜における分極方向と電界方向とが互いに同じであり、他方の面に形成された前記圧電膜における分極方向と電界方向とが互いに反対であることを特徴とする屈曲振動片。 - 請求項1ないし3のいずれか一項に記載の屈曲振動片において、
前記基部の一端から延長して形成された複数の振動腕を有していることを特徴とする屈曲振動片。 - 請求項4に記載の屈曲振動片において、
隣り合って位置する前記振動腕は、互いに異なる位相で屈曲振動をすることを特徴とする屈曲振動片。 - 基部と、前記基部から延長して少なくとも1本形成され屈曲振動をする振動腕と、を備えた屈曲振動片の製造方法であって、
前記振動腕の第1面および該第1面に対向する第2面に、下部電極を形成する下部電極形成ステップと、
前記第1面および前記第2面の前記下部電極に重ねられ、前記振動腕に対して互いに反対の分極方向を有する圧電膜を形成する圧電膜形成ステップと、
前記圧電膜に重ねて上部電極形成する上部電極形成ステップと、を有していることを特徴とする屈曲振動片の製造方法。 - 請求項6に記載の屈曲振動片の製造方法において、
前記下部電極形成ステップは、前記振動腕の前記第1面および前記第2面に形成された前記下部電極が相互に導電接続されていることを特徴とする屈曲振動片の製造方法。 - 請求項1ないし7のいずれか一項に記載の屈曲振動片と、該屈曲振動片を駆動させる半導体素子とを備えていることを特徴とする屈曲振動デバイス。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009143984A JP2011004035A (ja) | 2009-06-17 | 2009-06-17 | 屈曲振動片および屈曲振動片の製造方法 |
| US12/816,530 US8304967B2 (en) | 2009-06-17 | 2010-06-16 | Flexural vibration piece, flexural vibrator, and electronic apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009143984A JP2011004035A (ja) | 2009-06-17 | 2009-06-17 | 屈曲振動片および屈曲振動片の製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011004035A true JP2011004035A (ja) | 2011-01-06 |
| JP2011004035A5 JP2011004035A5 (ja) | 2012-07-05 |
Family
ID=43353668
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009143984A Withdrawn JP2011004035A (ja) | 2009-06-17 | 2009-06-17 | 屈曲振動片および屈曲振動片の製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8304967B2 (ja) |
| JP (1) | JP2011004035A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120056686A1 (en) * | 2010-09-08 | 2012-03-08 | Seiko Epson Corporation | Vibrator element, vibrator, vibration device, and electronic device |
| US8525606B2 (en) | 2011-02-02 | 2013-09-03 | Seiko Epson Corporation | Vibrator element, vibrator, oscillator, and electronic device |
| US8581669B2 (en) | 2011-02-02 | 2013-11-12 | Seiko Epson Corporation | Vibrator element, vibrator, oscillator, and electronic apparatus |
| US9461615B2 (en) | 2013-07-19 | 2016-10-04 | Seiko Epson Corporation | Vibrator element, vibrator, oscillator, electronic apparatus, and moving object |
| JPWO2015111503A1 (ja) * | 2014-01-24 | 2017-03-23 | 株式会社村田製作所 | 圧電振動子及び圧電振動装置 |
| US11538981B2 (en) | 2019-06-26 | 2022-12-27 | Seiko Epson Corporation | Vibration element, electronic apparatus, and vehicle |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6119134B2 (ja) * | 2012-07-19 | 2017-04-26 | セイコーエプソン株式会社 | 振動片、振動子、発振器および電子機器 |
| JP2014165573A (ja) * | 2013-02-22 | 2014-09-08 | Seiko Epson Corp | 振動片、振動子、電子デバイス、電子機器、および移動体 |
| US20160352307A1 (en) | 2015-05-27 | 2016-12-01 | Murata Manufacturing Co., Ltd. | Mems resonator with high quality factor |
| US10291203B2 (en) | 2016-07-12 | 2019-05-14 | Murata Manufacturing Co., Ltd. | Piezoelectric MEMS resonator with a high quality factor |
| JP2022086056A (ja) * | 2020-11-30 | 2022-06-09 | エスアイアイ・クリスタルテクノロジー株式会社 | 圧電振動片、圧電振動子、発振器、および圧電振動片の製造方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009005022A (ja) * | 2007-06-20 | 2009-01-08 | Seiko Epson Corp | 音叉型振動子、発振器 |
| JP2009081836A (ja) * | 2007-09-05 | 2009-04-16 | Seiko Epson Corp | 圧電薄膜音叉振動片、圧電薄膜音叉振動子及び加速度センサ |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1958014A (en) * | 1934-05-08 | Piezo-electric crystal | ||
| US2955216A (en) * | 1960-10-04 | Reinforced hollow piezoelectric ceramic transducer structures | ||
| US2836737A (en) * | 1953-07-20 | 1958-05-27 | Electric Machinery Mfg Co | Piezoelectric transducer |
| US3940974A (en) * | 1974-05-06 | 1976-03-02 | Minnesota Mining And Manufacturing Company | Electrically compensated sensor |
| US4087715A (en) * | 1976-11-18 | 1978-05-02 | Hughes Aircraft Company | Piezoelectric electromechanical micropositioner |
| US4308546A (en) * | 1978-03-15 | 1981-12-29 | Gould Inc. | Ink jet tip assembly |
| JPS60181996U (ja) * | 1984-05-11 | 1985-12-03 | 呉羽化学工業株式会社 | 電極端子取り出し構造体 |
| US6498651B1 (en) * | 1999-02-19 | 2002-12-24 | Thomson-Csf Sextant | Device for detecting activation movement for laser gyroscope |
| JP3791485B2 (ja) * | 2002-06-04 | 2006-06-28 | 株式会社村田製作所 | 音叉形振動子およびそれを用いた振動ジャイロおよびそれを用いた電子装置および音叉形振動子の製造方法 |
| KR100704990B1 (ko) * | 2005-08-08 | 2007-04-10 | 삼성전기주식회사 | 고정자 및 이를 이용한 세라믹스 튜브형 초음파 모터 |
| JP4715652B2 (ja) | 2006-06-30 | 2011-07-06 | セイコーエプソン株式会社 | 圧電振動片 |
| JP2010226609A (ja) | 2009-03-25 | 2010-10-07 | Seiko Epson Corp | 振動片および振動子 |
-
2009
- 2009-06-17 JP JP2009143984A patent/JP2011004035A/ja not_active Withdrawn
-
2010
- 2010-06-16 US US12/816,530 patent/US8304967B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009005022A (ja) * | 2007-06-20 | 2009-01-08 | Seiko Epson Corp | 音叉型振動子、発振器 |
| JP2009081836A (ja) * | 2007-09-05 | 2009-04-16 | Seiko Epson Corp | 圧電薄膜音叉振動片、圧電薄膜音叉振動子及び加速度センサ |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120056686A1 (en) * | 2010-09-08 | 2012-03-08 | Seiko Epson Corporation | Vibrator element, vibrator, vibration device, and electronic device |
| US8525606B2 (en) | 2011-02-02 | 2013-09-03 | Seiko Epson Corporation | Vibrator element, vibrator, oscillator, and electronic device |
| US8581669B2 (en) | 2011-02-02 | 2013-11-12 | Seiko Epson Corporation | Vibrator element, vibrator, oscillator, and electronic apparatus |
| US9461615B2 (en) | 2013-07-19 | 2016-10-04 | Seiko Epson Corporation | Vibrator element, vibrator, oscillator, electronic apparatus, and moving object |
| JPWO2015111503A1 (ja) * | 2014-01-24 | 2017-03-23 | 株式会社村田製作所 | 圧電振動子及び圧電振動装置 |
| US11538981B2 (en) | 2019-06-26 | 2022-12-27 | Seiko Epson Corporation | Vibration element, electronic apparatus, and vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| US8304967B2 (en) | 2012-11-06 |
| US20100320875A1 (en) | 2010-12-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011004035A (ja) | 屈曲振動片および屈曲振動片の製造方法 | |
| JP4930381B2 (ja) | 圧電振動装置 | |
| JP5513287B2 (ja) | ピストン・ダイアフラムを有した圧電型マイクロスピーカ及びその製造方法 | |
| KR101561661B1 (ko) | 진동막에 부착된 질량체를 가진 압전형 마이크로 스피커 및 그 제조 방법 | |
| KR101295215B1 (ko) | 진동편, 진동자, 발진기 및, 전자 기기 | |
| JP4404218B2 (ja) | 音叉振動子およびその製造方法 | |
| CN102340291B (zh) | 弯曲振动片、振子、振荡器以及电子设备 | |
| WO2004038914A1 (ja) | 圧電振動子、それを用いたフィルタ及び圧電振動子の調整方法 | |
| JP5375503B2 (ja) | 屈曲振動片 | |
| JP2010252302A (ja) | 屈曲振動片およびそれを用いた発振器 | |
| JP2010028536A (ja) | 音叉型振動子及び発振器 | |
| US9331668B2 (en) | Vibrator with a beam-shaped portion above a recess in a substrate, and oscillator using same | |
| JP2012015886A (ja) | 振動片、振動子、発振器および電子機器 | |
| JP2011087154A (ja) | 圧電振動片、圧電振動子、発振器、圧電振動片の製造方法 | |
| JP5822186B2 (ja) | 振動子、発振器、および電子機器 | |
| JP2008233029A (ja) | 加速度センサおよび電子機器 | |
| JP6111966B2 (ja) | 振動子の製造方法 | |
| JP5531809B2 (ja) | 屈曲振動片、屈曲振動子、発振器および電子機器 | |
| JP5533349B2 (ja) | 屈曲振動片、屈曲振動子、発振器、および電子機器 | |
| JP5299645B2 (ja) | 屈曲振動片および屈曲振動子の製造方法 | |
| JP2010187059A (ja) | ウォーク型振動片およびその製造方法 | |
| JP2008211352A (ja) | 圧電振動子、発振器、リアルタイムクロック、および、電波時計受信モジュール | |
| JP5019040B2 (ja) | 圧電振動子、および発振器 | |
| US20210313960A1 (en) | Vibrator element | |
| JP2012034171A (ja) | 振動片、振動子、発振器、および電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120521 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120521 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130516 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130528 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20130624 |