JP2010512901A - 脊椎骨支持デバイス - Google Patents
脊椎骨支持デバイス Download PDFInfo
- Publication number
- JP2010512901A JP2010512901A JP2009542260A JP2009542260A JP2010512901A JP 2010512901 A JP2010512901 A JP 2010512901A JP 2009542260 A JP2009542260 A JP 2009542260A JP 2009542260 A JP2009542260 A JP 2009542260A JP 2010512901 A JP2010512901 A JP 2010512901A
- Authority
- JP
- Japan
- Prior art keywords
- longitudinal
- rigid
- implant
- longitudinal portion
- elastic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000007943 implant Substances 0.000 claims abstract description 172
- 238000013016 damping Methods 0.000 claims abstract description 113
- 210000000988 bone and bone Anatomy 0.000 claims abstract description 28
- 238000004873 anchoring Methods 0.000 claims abstract description 13
- 238000003780 insertion Methods 0.000 claims abstract description 13
- 230000037431 insertion Effects 0.000 claims abstract description 13
- 230000008878 coupling Effects 0.000 claims description 87
- 238000010168 coupling process Methods 0.000 claims description 87
- 238000005859 coupling reaction Methods 0.000 claims description 87
- 238000000034 method Methods 0.000 claims description 39
- 238000005452 bending Methods 0.000 claims description 32
- 239000007787 solid Substances 0.000 claims description 27
- 230000000295 complement effect Effects 0.000 claims description 13
- 229920002994 synthetic fiber Polymers 0.000 claims description 12
- 239000012209 synthetic fiber Substances 0.000 claims description 11
- 230000006835 compression Effects 0.000 claims description 10
- 238000007906 compression Methods 0.000 claims description 10
- 239000013013 elastic material Substances 0.000 claims description 10
- 239000000463 material Substances 0.000 claims description 8
- 230000000903 blocking effect Effects 0.000 claims description 5
- 238000002513 implantation Methods 0.000 description 17
- 230000008569 process Effects 0.000 description 9
- 210000003041 ligament Anatomy 0.000 description 8
- 230000004927 fusion Effects 0.000 description 7
- 230000007935 neutral effect Effects 0.000 description 6
- 230000003187 abdominal effect Effects 0.000 description 5
- 238000012937 correction Methods 0.000 description 4
- 230000006378 damage Effects 0.000 description 4
- 230000009977 dual effect Effects 0.000 description 4
- 210000003128 head Anatomy 0.000 description 4
- 210000002517 zygapophyseal joint Anatomy 0.000 description 4
- 210000000887 face Anatomy 0.000 description 3
- 230000001575 pathological effect Effects 0.000 description 3
- 125000006850 spacer group Chemical group 0.000 description 3
- 0 CC1[I+]*(C)CCC1 Chemical compound CC1[I+]*(C)CCC1 0.000 description 2
- 206010058907 Spinal deformity Diseases 0.000 description 2
- 208000007103 Spondylolisthesis Diseases 0.000 description 2
- 208000037873 arthrodesis Diseases 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 208000000875 Spinal Curvatures Diseases 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 239000000560 biocompatible material Substances 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000036244 malformation Effects 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 206010039722 scoliosis Diseases 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000009958 sewing Methods 0.000 description 1
- 239000011343 solid material Substances 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
Images































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7019—Longitudinal elements having flexible parts, or parts connected together, such that after implantation the elements can move relative to each other
- A61B17/7031—Longitudinal elements having flexible parts, or parts connected together, such that after implantation the elements can move relative to each other made wholly or partly of flexible material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7019—Longitudinal elements having flexible parts, or parts connected together, such that after implantation the elements can move relative to each other
- A61B17/702—Longitudinal elements having flexible parts, or parts connected together, such that after implantation the elements can move relative to each other having a core or insert, and a sleeve, whereby a screw or hook can move along the core or in the sleeve
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7032—Screws or hooks with U-shaped head or back through which longitudinal rods pass
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7032—Screws or hooks with U-shaped head or back through which longitudinal rods pass
- A61B17/7034—Screws or hooks with U-shaped head or back through which longitudinal rods pass characterised by a lateral opening
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7041—Screws or hooks combined with longitudinal elements which do not contact vertebrae with single longitudinal rod offset laterally from single row of screws or hooks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
- A61B17/7049—Connectors, not bearing on the vertebrae, for linking longitudinal elements together
- A61B17/705—Connectors, not bearing on the vertebrae, for linking longitudinal elements together for linking adjacent ends of longitudinal elements
Landscapes
- Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Neurology (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Prostheses (AREA)
- Surgical Instruments (AREA)
Abstract
Description
減衰要素の剛性要素間に減衰要素の中央部分を配置するステップ。
減衰要素の剛性要素に沿って減衰要素の長手方向部分を配置するステップ。
減衰要素の長手方向部分の張力を調節するステップ。
減衰要素の剛性要素に対して減衰要素の長手方向部分を固定するステップ。
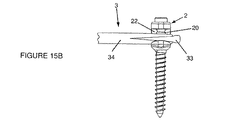
剛性要素(34)間に中央部分(32)を配置するステップ。
剛性要素(34)に対して作動的に長手方向部分(33)を配置するステップ。
長手方向部分(33)の張力を調節するステップ。
剛性要素(34)に対して長手方向部分(33)を固定するステップ。
Claims (46)
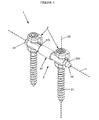
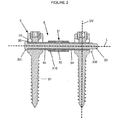
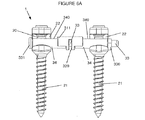
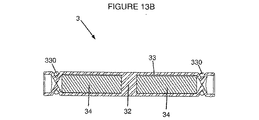
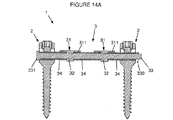
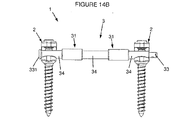
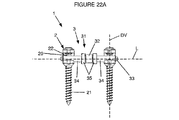
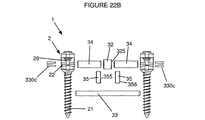
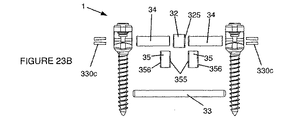
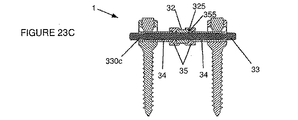
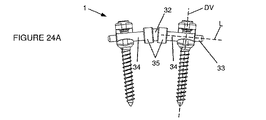
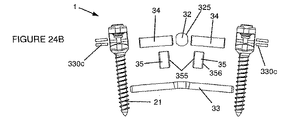
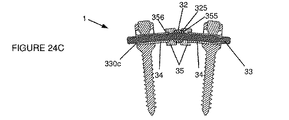
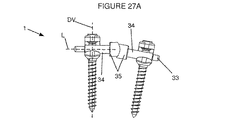
- 少なくとも2つの骨固定インプラント(2)と、長手方向軸(L)を有し骨固定インプラント(2)を互いに連結する少なくとも1つの連結要素(3)とを備え、該少なくとも2つの骨固定インプラント(2)のそれぞれが、背腹方向軸と呼ばれる軸(DV)に沿って脊椎骨中に固定されるように設計された、脊椎骨支持デバイス(1)であって、連結要素(3)が少なくとも2つの剛性要素(34)を備え、クランプ(20)によってインプラント(2)に該剛性要素のそれぞれが連結され少なくとも1つの弾性減衰要素(31)によって該剛性要素のそれぞれが互いに関節連結され、デバイス(1)が埋め込まれることが意図される患者に対して動きの自由を与え、これらの動きの際に連結要素(3)が受ける応力を吸収し、デバイス(1)がその初期形態に復帰するように傾向付けし、減衰要素(31)が、一方では、2つの剛性要素(34)の間に配置され、2つの剛性要素(34)と協働して連結要素(3)に生じる圧縮応力を吸収する、中央部分と呼ばれる少なくとも1つの弾性部分(32)と、他方では、2つの端部を備える長手方向部分と呼ばれる少なくとも1つの弾性部分(33)とを備え、この2つの端部がそれぞれ、連結要素(3)に生じる伸長応力または屈曲応力を吸収するように、長手方向部分(33)のラッチ(330、331)によってインプラント(2)に対しておよび/または剛性要素(34)に対して固定状態に保たれることを特徴とする、脊椎骨支持デバイス(1)。
- インプラント(2)が、クランプ(20)を備え、クランプ(20)が、連結要素を固定し、被固定時には連結要素(3)の長手方向軸(L)とインプラント(2)の背腹方向軸(DV)との間で固定角度を維持することを特徴とする、請求項1に記載のデバイス。
- 減衰要素(31)の中央部分(32)が、連結要素(3)の長手方向軸(L)で、間に減衰要素(31)が配置されるインプラント(2)のそれぞれから実質的に等距離に配置されることを特徴とする、請求項1または2に記載のデバイス。
- インプラント(2)間の減衰要素(31)の中央部分(32)の位置が、連結要素(3)の長手方向軸(L)において偏心していることを特徴とする、請求項1または2に記載のデバイス。
- 減衰要素(31)が、少なくとも1つの弾性材料から構成されることを特徴とする、請求項1から4のいずれかに記載のデバイス。
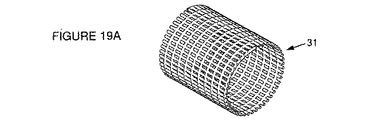
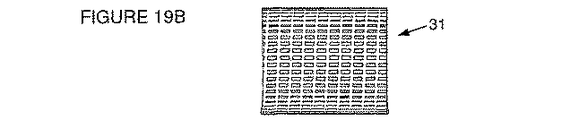
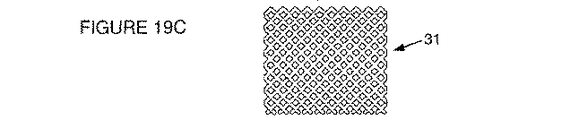
- 減衰要素(31)が、合成繊維からなる少なくとも1つの弾性ウィーブまたはブレードを含み、このウィーブの縫い目またはこのブレードの編み目が、所望の弾性に応じて減衰要素(31)の弾性特性を調節するために様々な度合で目を詰められることを特徴とする、請求項1から5のいずれか一項に記載のデバイス。
- 減衰要素(31)の中央部分(32)が、連結要素(3)の管(34)の外径よりも様々な度合で大きな外径を有することを特徴とする、請求項1から6のいずれか一項に記載のデバイス。
- 弾性長手方向部分(33)の張力が、ラッチ(330、331)により調節することが可能であることを特徴とする、請求項1から7のいずれか一項に記載のデバイス。
- 弾性長手方向部分(33)が、長手方向部分(33)において少なくとも1つの所与の張力を実現するために、ラッチ(330、331)が長手方向部分(33)をブロックしなければならない少なくとも1つの位置を特定するために使用することが可能な少なくとも1つの張力マークを、弾性長手方向部分(33)の端部の少なくとも一方の少なくとも付近に備えることを特徴とする、請求項1から8のいずれか一項に記載のデバイス。
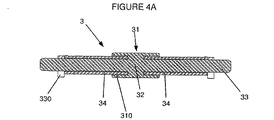
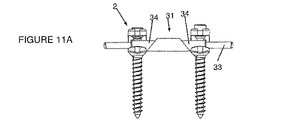
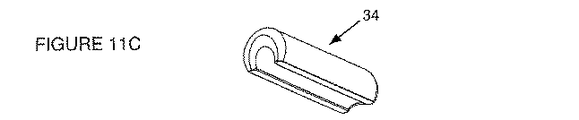
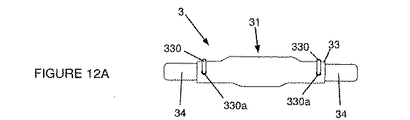
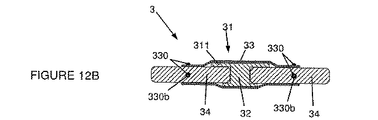
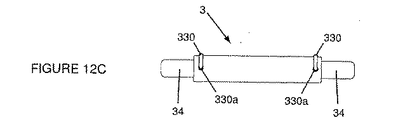
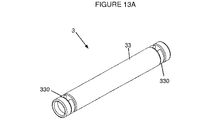
- 連結要素(3)が2つの中空管(34)を備え、該2つの中空管(34)のそれぞれが、減衰要素(31)の弾性長手方向部分(33)が中に設置される内部管路を備え、前記弾性長手方向部分(33)が、連結要素(3)の長さよりも実質的に長い長さを有し、長手方向部分(33)の2つの端部が、中空管(34)から突出し、それぞれが長手方向部分(33)のラッチ(330、331)を用いて管(34)に対して固定状態に保たれることを特徴とする、請求項1から9のいずれか一項に記載のデバイス。
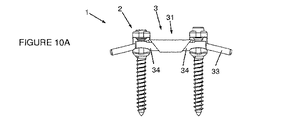
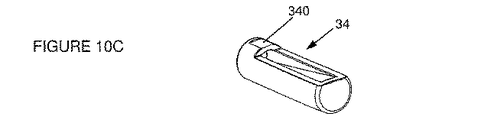
- 剛性要素が中実管またはバーであり、該中実管またはバーのそれぞれが、インプラント(2)のクランプ(20)と協働する端部と、中央部分(32)と協働する端部とを有し、弾性長手方向部分(33)が、これらの中空管に対して平行であり、連結要素(3)の長さよりも実質的に長い長さを有することを特徴とする、請求項1から9のいずれか一項に記載のデバイス。
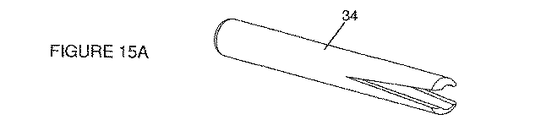
- 中実管が、長手方向部分(33)の挿入を可能にする溝またはシュートを備え、したがってクランプ(20)が、中実管(34)に置かれ、長手方向部分(33)には置かれないことを特徴とする、請求項11に記載のデバイス。
- 溝またはシュートが、長手方向部分(33)の挿入を可能にする孔によって、クランプ(20)と協働する中実管(34)の固定端部において延在しており、該溝が、クランプ(20)を支持するための表面により閉鎖されることを特徴とする、請求項11に記載のデバイス。
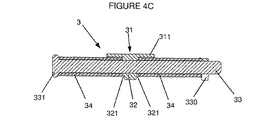
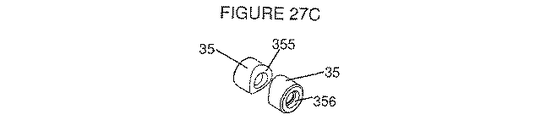
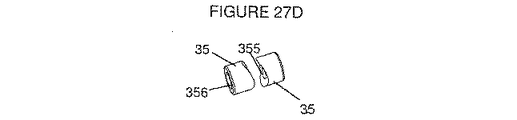
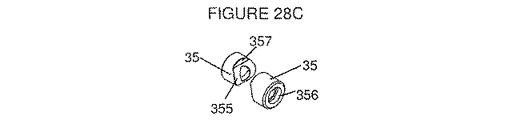
- 減衰要素(31)の中央部分(32)および長手方向部分(33)が、単一のおよび唯一のブロックを形成し、減衰要素(31)の中央部分(32)と長手方向部分(33)との間の接合部が凹部を形成し、該凹部のそれぞれが剛性要素(34)の1つの一方の端部を受容することを特徴とする、請求項1から13のいずれか一項に記載のデバイス。
- 減衰要素(31)の中央部分(32)および長手方向部分(33)が、合成繊維からなる単一のおよび唯一のウィーブまたはブレードから構成され、ウィーブの目のサイズまたはブレードの編み目のサイズが、2つの部分(32および33)において実質的に同一であり、したがって2つの部分(32および33)が、同一の弾性特性を有することを特徴とする、請求項14に記載のデバイス。
- 減衰要素(31)の中央部分(32)および長手方向部分(33)が単一のおよび唯一のブロックを形成するが、ウィーブまたはブレードの2つの部分(32および33)における目の詰まり度合が異なることによって、減衰要素(31)の中央部分(32)および長手方向部分(33)の弾性特性がそれぞれ異なることを特徴とする、請求項14に記載のデバイス。
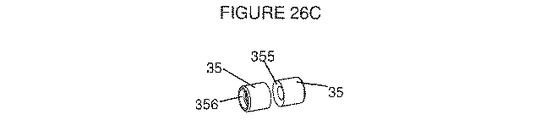
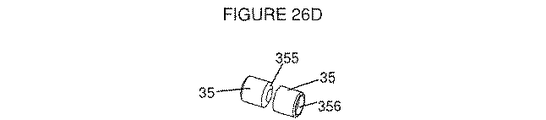
- 減衰要素(31)の中央部分(32)および長手方向部分(33)が、2つの別個の要素であり、中央部分(32)が、中空であり、長手方向部分(33)の外径と実質的に同一である内径を有することを特徴とする、請求項1から12のいずれか一項に記載のデバイス。
- 減衰要素(31)の中央部分(32)および長手方向部分(33)が、それぞれ、合成繊維からなるウィーブまたはブレードを含み、ウィーブの目のサイズまたはブレードの編み目のサイズが、2つの部分(32および33)において実質的に同一であり、したがって2つの部分(32および33)が、同一の弾性特性を有することを特徴とする、請求項17に記載のデバイス。
- 減衰要素(31)の中央部分(32)の弾性特性および長手方向部分(33)の弾性特性が、ウィーブまたはブレードの2つの部分(32および33)における目の詰まり度合が異なることによって、それぞれ異なることを特徴とする、請求項17に記載のデバイス。
- 中央部分(32)および長手方向部分(33)の2つのウィーブまたはブレードが、互いに縫われることを特徴とする、請求項18および19のいずれか一項に記載のデバイス。
- 中央部分(32)および長手方向部分(33)が、それぞれ異なる材料から構成されることを特徴とする、請求項17に記載のデバイス。
- 中央部分(32)の内径が、連結要素(3)の中空管(34)の内径よりも実質的に小さく、長手方向部分(33)の外径が、中央部分(32)では、中央部分(32)の内径と実質的に同一であり、中空管(34)では、中空管(34)の内径と実質的に同一であることを特徴とする、請求項17から21のいずれか一項に記載のデバイス。
- 中央部分(32)の内径および長手方向部分(33)の外径が、連結要素(3)の中空管(34)の内径と実質的に同一であることを特徴とする、請求項17から21のいずれか一項に記載のデバイス。
- 中央部分(32)が、連結要素(3)の少なくとも1つの面に配置された、デバイス(1)が埋め込まれることが意図される患者が動く際に連結要素(3)の曲げを容易にする少なくとも1つのスロット(320)または切欠部を、長手方向軸(L)に沿った中央部分(32)の中央部付近に備えることを特徴とする、請求項1から23のいずれか一項に記載のデバイス。
- 中央部分(32)が、連結要素(3)の少なくとも1つの面に配置された各剛性要素(34)に面し、デバイス(1)が埋め込まれることが意図される患者が動く際に連結要素(3)の曲げを容易にする斜角面(321)を、長手方向軸(L)に沿った中央部分(32)の中央部の両側に備えることを特徴とする、請求項1から24のいずれか一項に記載のデバイス。
- 2つの剛性要素(34)が、中央部分(32)の内部の相補的形状の凹部(322)に嵌着する曲線状外側形状部(341)を、中央部分に接触状態にある剛性要素(34)の端部に備え(32)、この形状の相補性によって、デバイス(1)が埋め込まれることが意図される患者の任意の動きの際に連結要素(3)が曲がる際の中央部分(32)に対する剛性要素(34)の動きが容易になることを特徴とする、請求項1から25のいずれか一項に記載のデバイス。
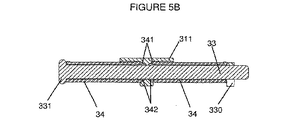
- 中空管(34)が、一方では、中央部分(32)の内部の相補形状の凹部(322)に嵌着する曲線状外側形状部(341)を、中央部分(32)に接触状態にある中空管(34)の端部に備え、この形状の相補性によって、デバイス(1)が埋め込まれることが意図される患者の任意の動きの際に連結要素(3)が曲がる際の、中央部分(32)に対する剛性要素(34)の動きが容易になり、中空管(34)が、他方では、フレア状内側形状部(342)を、中央部分(32)に接触状態にある中空管(34)の端部に備えて、この曲げの際に中空管の内部の長手方向部分(33)の圧縮および切断を防ぐことを特徴とする、請求項10から25のいずれか一項に記載のデバイス。
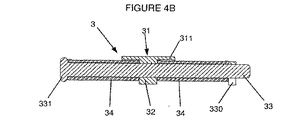
- 減衰要素(31)が、デバイス(1)が埋め込まれることが意図される患者の動きの際の連結要素(3)の曲げに逆らう少なくとも1つの停止要素(310、311)を、減衰要素(31)の少なくとも1つの面の少なくとも一部に備えることを特徴とする、請求項1から27のいずれか一項に記載のデバイス。
- 停止要素(310、311)が、連結要素(3)の曲げにある程度逆らうように弾性材料から形成されることを特徴とする、請求項28に記載のデバイス。
- 停止要素(310、311)が、連結要素(3)の曲げに完全に逆らうように剛性の非弾性材料から構成されることを特徴とする、請求項28に記載のデバイス。
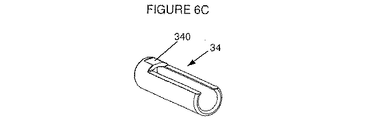
- 剛性要素(34)が、それらの少なくとも1つの面におよび少なくともクランプ(20)の位置に、少なくとも1つの平坦部(340)を備え、前記平坦部(340)が、クランプ(20)と協働して、剛性要素(34)がそれらの長手方向軸(L)の周囲で回転するのを防ぐことを特徴とする、請求項1から29のいずれか一項に記載のデバイス。
- 骨固定インプラント(2)が、脊椎骨にインプラント(2)を固定的に装着するために使用される骨固定手段(21)を備え、骨固定インプラント(2)がそれぞれ、管路(22)の内壁部に対して連結要素(3)を締め付けるための手段を含むクランプ(20)を有する、連結要素(3)を受容するように意図された管路(22)を備え、締付け用のこれらの手段と管路(22)との協働を利用して、連結要素(3)の長手方向軸(L)と脊椎骨の背腹方向軸との間の固定角度を保持することを特徴とする、請求項1から31のいずれか一項に記載のデバイス。
- 長手方向部分(33)のラッチ(330、331)が、ステープル(330)と呼ばれる少なくとも1つの着脱式ロックを含み、長手方向部分(33)の少なくとも1つの端部をクランプすることを特徴とする、請求項1から32のいずれか一項に記載のデバイス。
- 長手方向部分(33)のラッチ(330、331)が、長手方向軸(L)に対して実質的に垂直である軸に沿って長手方向部分(33)を貫通する少なくとも1つの孔に嵌着する、少なくとも1つの着脱式ロック(300)を備え、この孔が、長手方向部分(33)の張力を決定するために使用される張力マークを構成することを特徴とする、請求項1から32のいずれか一項に記載のデバイス。
- 長手方向部分(33)のラッチ(330、331)が、中空管(34)の外径よりも大きな外径を有する停止要素(331)を備えることを特徴とする、請求項10から34のいずれか一項に記載のデバイス。
- 2つの剛性要素間に中央部分を配置する段階と、
剛性要素に沿って長手方向部分を配置する段階と、
長手方向部分(33)の張力を調節する段階と、
ラッチ(330、331)によって剛性要素(34)に対して長手方向部分(33)を固定する段階と
を含むことを特徴とする、請求項1から35のいずれかに記載の脊椎骨支持デバイス(1)を埋込み前に準備するための方法。 - 長手方向部分(33)の張力を調節するための段階が、長手方向部分の端部の少なくとも一方の付近に少なくとも1つの張力マークをマーキングするための段階を伴うことを特徴とする、請求項36に記載の方法。
- ラッチ(330、331)によって剛性要素(34)に対して長手方向部分(33)を固定するための段階が、ステープル(330)と呼ばれる着脱式ロックにより長手方向部分(33)の少なくとも1つの端部をクランプするための段階を含むことを特徴とする、請求項36および37のいずれか一項に記載の方法。
- 張力を調節するための段階および長手方向部分(33)を固定するための段階が、長手方向軸(L)に対して実質的に垂直である軸に沿って長手方向部分(33)中に穿孔された少なくとも1つの孔の中に少なくとも1つの着脱式ロック(300)を挿入するための段階を含み、この孔が、長手方向部分(33)の張力を決定するために使用される張力マークを構成することを特徴とする、請求項38に記載の方法。
- 剛性要素に沿って長手方向部分を配置するステップが、剛性要素の溝またはシュートの内部に長手方向部分を挿入するステップを含むことを特徴とする、請求項36から39のいずれか一項に記載の方法。
- 剛性要素の溝またはシュートの内部に長手方向部分を挿入するためのステップが、クランプ(20)のレベルの剛性要素(34)の固定端部にて溝またシュートを延在する孔の内部に長手方向部分を挿入するステップに関連付けされることを特徴とする、請求項40に記載の方法。
- 剛性要素(34)に対して長手方向部分を配置するステップが、中空管である剛性要素(34)の管路の内部に、およびやはり中空である中央部分の管路の内部に長手方向部分を挿入するステップを含むことを特徴とする、請求項36から41のいずれか一項に記載の方法。
- 長手方向部分(33)を固定するための段階が、着脱式ロック(330)を備える端部の反対側の長手方向部分(33)の端部に、中空管(34)の外径よりも大きな外径を有する停止要素(331)に当たる停止段階を含むことを特徴とする、請求項42に記載の方法。
- 剛性要素に対して長手方向部分を配置するステップが、弾性シースまたはスリーブである長手方向部分(33)の内部に、中実管またはバーである剛性要素および中央部分を挿入するためのステップを含むことを特徴とする、請求項36から43のいずれか一項に記載の方法。
- インプラント(2)に対して長手方向軸(L)に沿った剛性要素(34)の配置を調節するためのステップを含み、その後にクランプ(20)により所望の位置に剛性要素をブロックするためのステップが続くことを特徴とする、請求項36から44のいずれか一項に記載の方法。
- 脊柱の軸に対して剛性要素の長手方向軸(L)の配向を調節するためのステップを含み、その後にクランプ(20)により所望の配向で剛性要素をブロックするためのステップが続くことを特徴とする、請求項36から45のいずれか一項に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0611198A FR2910267B1 (fr) | 2006-12-21 | 2006-12-21 | Dispositif de soutien vertebral |
| FR0611198 | 2006-12-21 | ||
| PCT/IB2007/004061 WO2008078163A2 (en) | 2006-12-21 | 2007-12-21 | Vertebral support device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010512901A true JP2010512901A (ja) | 2010-04-30 |
| JP5322947B2 JP5322947B2 (ja) | 2013-10-23 |
Family
ID=38814434
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009542260A Expired - Fee Related JP5322947B2 (ja) | 2006-12-21 | 2007-12-21 | 脊椎骨支持デバイス |
Country Status (11)
| Country | Link |
|---|---|
| US (3) | US8974497B2 (ja) |
| EP (1) | EP2091451A2 (ja) |
| JP (1) | JP5322947B2 (ja) |
| KR (1) | KR101446620B1 (ja) |
| CN (1) | CN101605501B (ja) |
| AU (1) | AU2007337793B2 (ja) |
| BR (1) | BRPI0720494A2 (ja) |
| CA (1) | CA2669905C (ja) |
| FR (1) | FR2910267B1 (ja) |
| MX (1) | MX2009006788A (ja) |
| WO (1) | WO2008078163A2 (ja) |
Families Citing this family (118)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2897259B1 (fr) | 2006-02-15 | 2008-05-09 | Ldr Medical Soc Par Actions Si | Cage intersomatique transforaminale a greffon de fusion intervetebrale et instrument d'implantation de la cage |
| US7833250B2 (en) | 2004-11-10 | 2010-11-16 | Jackson Roger P | Polyaxial bone screw with helically wound capture connection |
| US8353932B2 (en) | 2005-09-30 | 2013-01-15 | Jackson Roger P | Polyaxial bone anchor assembly with one-piece closure, pressure insert and plastic elongate member |
| US8292926B2 (en) | 2005-09-30 | 2012-10-23 | Jackson Roger P | Dynamic stabilization connecting member with elastic core and outer sleeve |
| US10729469B2 (en) | 2006-01-09 | 2020-08-04 | Roger P. Jackson | Flexible spinal stabilization assembly with spacer having off-axis core member |
| US7862587B2 (en) | 2004-02-27 | 2011-01-04 | Jackson Roger P | Dynamic stabilization assemblies, tool set and method |
| US10258382B2 (en) | 2007-01-18 | 2019-04-16 | Roger P. Jackson | Rod-cord dynamic connection assemblies with slidable bone anchor attachment members along the cord |
| US8876868B2 (en) | 2002-09-06 | 2014-11-04 | Roger P. Jackson | Helical guide and advancement flange with radially loaded lip |
| US7621918B2 (en) | 2004-11-23 | 2009-11-24 | Jackson Roger P | Spinal fixation tool set and method |
| US7377923B2 (en) | 2003-05-22 | 2008-05-27 | Alphatec Spine, Inc. | Variable angle spinal screw assembly |
| US7967850B2 (en) | 2003-06-18 | 2011-06-28 | Jackson Roger P | Polyaxial bone anchor with helical capture connection, insert and dual locking assembly |
| US8936623B2 (en) | 2003-06-18 | 2015-01-20 | Roger P. Jackson | Polyaxial bone screw assembly |
| US7766915B2 (en) | 2004-02-27 | 2010-08-03 | Jackson Roger P | Dynamic fixation assemblies with inner core and outer coil-like member |
| US8366753B2 (en) | 2003-06-18 | 2013-02-05 | Jackson Roger P | Polyaxial bone screw assembly with fixed retaining structure |
| US7776067B2 (en) | 2005-05-27 | 2010-08-17 | Jackson Roger P | Polyaxial bone screw with shank articulation pressure insert and method |
| US8092500B2 (en) * | 2007-05-01 | 2012-01-10 | Jackson Roger P | Dynamic stabilization connecting member with floating core, compression spacer and over-mold |
| US7179261B2 (en) | 2003-12-16 | 2007-02-20 | Depuy Spine, Inc. | Percutaneous access devices and bone anchor assemblies |
| US11419642B2 (en) | 2003-12-16 | 2022-08-23 | Medos International Sarl | Percutaneous access devices and bone anchor assemblies |
| US7527638B2 (en) | 2003-12-16 | 2009-05-05 | Depuy Spine, Inc. | Methods and devices for minimally invasive spinal fixation element placement |
| US8152810B2 (en) | 2004-11-23 | 2012-04-10 | Jackson Roger P | Spinal fixation tool set and method |
| WO2005092218A1 (en) | 2004-02-27 | 2005-10-06 | Jackson Roger P | Orthopedic implant rod reduction tool set and method |
| US7160300B2 (en) | 2004-02-27 | 2007-01-09 | Jackson Roger P | Orthopedic implant rod reduction tool set and method |
| US11241261B2 (en) | 2005-09-30 | 2022-02-08 | Roger P Jackson | Apparatus and method for soft spinal stabilization using a tensionable cord and releasable end structure |
| US7651502B2 (en) | 2004-09-24 | 2010-01-26 | Jackson Roger P | Spinal fixation tool set and method for rod reduction and fastener insertion |
| US8926672B2 (en) | 2004-11-10 | 2015-01-06 | Roger P. Jackson | Splay control closure for open bone anchor |
| WO2006057837A1 (en) | 2004-11-23 | 2006-06-01 | Jackson Roger P | Spinal fixation tool attachment structure |
| US9168069B2 (en) | 2009-06-15 | 2015-10-27 | Roger P. Jackson | Polyaxial bone anchor with pop-on shank and winged insert with lower skirt for engaging a friction fit retainer |
| US9216041B2 (en) | 2009-06-15 | 2015-12-22 | Roger P. Jackson | Spinal connecting members with tensioned cords and rigid sleeves for engaging compression inserts |
| US8444681B2 (en) | 2009-06-15 | 2013-05-21 | Roger P. Jackson | Polyaxial bone anchor with pop-on shank, friction fit retainer and winged insert |
| US7901437B2 (en) | 2007-01-26 | 2011-03-08 | Jackson Roger P | Dynamic stabilization member with molded connection |
| FR2887762B1 (fr) | 2005-06-29 | 2007-10-12 | Ldr Medical Soc Par Actions Si | Instrumentation d'insertion de prothese de disque intervertebral entre des vertebres |
| US8105368B2 (en) | 2005-09-30 | 2012-01-31 | Jackson Roger P | Dynamic stabilization connecting member with slitted core and outer sleeve |
| US7815663B2 (en) | 2006-01-27 | 2010-10-19 | Warsaw Orthopedic, Inc. | Vertebral rods and methods of use |
| JP5210305B2 (ja) * | 2006-06-16 | 2013-06-12 | アルファテック スパイン, インコーポレイテッド | 脊椎ネジアセンブリシステム、脊椎ネジアセンブリを移植するためのシステム |
| AU2007332794C1 (en) | 2006-12-08 | 2012-01-12 | Roger P. Jackson | Tool system for dynamic spinal implants |
| FR2910267B1 (fr) | 2006-12-21 | 2009-01-23 | Ldr Medical Soc Par Actions Si | Dispositif de soutien vertebral |
| US8366745B2 (en) | 2007-05-01 | 2013-02-05 | Jackson Roger P | Dynamic stabilization assembly having pre-compressed spacers with differential displacements |
| US8475498B2 (en) | 2007-01-18 | 2013-07-02 | Roger P. Jackson | Dynamic stabilization connecting member with cord connection |
| US8465546B2 (en) | 2007-02-16 | 2013-06-18 | Ldr Medical | Intervertebral disc prosthesis insertion assemblies |
| US10603077B2 (en) * | 2007-04-12 | 2020-03-31 | Globus Medical, Inc. | Orthopedic fastener for stabilization and fixation |
| US10383660B2 (en) | 2007-05-01 | 2019-08-20 | Roger P. Jackson | Soft stabilization assemblies with pretensioned cords |
| FR2916956B1 (fr) | 2007-06-08 | 2012-12-14 | Ldr Medical | Cage intersomatique,prothese intervertebrale,dispositif d'ancrage et instrumentation d'implantation |
| US20090105756A1 (en) | 2007-10-23 | 2009-04-23 | Marc Richelsoph | Spinal implant |
| US9232968B2 (en) * | 2007-12-19 | 2016-01-12 | DePuy Synthes Products, Inc. | Polymeric pedicle rods and methods of manufacturing |
| US9408641B2 (en) * | 2008-02-02 | 2016-08-09 | Globus Medical, Inc. | Spinal rod link reducer |
| US9345517B2 (en) | 2008-02-02 | 2016-05-24 | Globus Medical, Inc. | Pedicle screw having a removable rod coupling |
| WO2009097623A2 (en) * | 2008-02-02 | 2009-08-06 | Texas Scottish Rite Hospital For Children | Pedicle screw |
| US9579126B2 (en) | 2008-02-02 | 2017-02-28 | Globus Medical, Inc. | Spinal rod link reducer |
| US20100289784A1 (en) * | 2008-02-21 | 2010-11-18 | Akizumi Fujioka | Display device having optical sensors |
| US9060813B1 (en) | 2008-02-29 | 2015-06-23 | Nuvasive, Inc. | Surgical fixation system and related methods |
| JP2012529969A (ja) | 2008-08-01 | 2012-11-29 | ロジャー・ピー・ジャクソン | スリーブ付き張力付与りコードを備える長手方向接続部材 |
| EP2160988B1 (en) * | 2008-09-04 | 2012-12-26 | Biedermann Technologies GmbH & Co. KG | Rod-shaped implant in particular for stabilizing the spinal column and stabilization device including such a rod-shaped implant |
| ES2542006T3 (es) * | 2008-09-05 | 2015-07-29 | Biedermann Technologies Gmbh & Co. Kg | Dispositivo de estabilización ósea, en particular para la columna vertebral |
| US9603629B2 (en) | 2008-09-09 | 2017-03-28 | Intelligent Implant Systems Llc | Polyaxial screw assembly |
| GB2465156B (en) | 2008-11-05 | 2012-09-26 | Dalmatic Lystrup As | Bone fixation system |
| US8118840B2 (en) | 2009-02-27 | 2012-02-21 | Warsaw Orthopedic, Inc. | Vertebral rod and related method of manufacture |
| US8998959B2 (en) | 2009-06-15 | 2015-04-07 | Roger P Jackson | Polyaxial bone anchors with pop-on shank, fully constrained friction fit retainer and lock and release insert |
| US11229457B2 (en) | 2009-06-15 | 2022-01-25 | Roger P. Jackson | Pivotal bone anchor assembly with insert tool deployment |
| WO2013043218A1 (en) | 2009-06-15 | 2013-03-28 | Jackson Roger P | Polyaxial bone anchor with pop-on shank and winged insert with friction fit compressive collet |
| EP2753252A1 (en) | 2009-06-15 | 2014-07-16 | Jackson, Roger P. | Polyaxial bone anchor with pop-on shank and friction fit retainer with low profile edge lock |
| US9668771B2 (en) | 2009-06-15 | 2017-06-06 | Roger P Jackson | Soft stabilization assemblies with off-set connector |
| US9320543B2 (en) * | 2009-06-25 | 2016-04-26 | DePuy Synthes Products, Inc. | Posterior dynamic stabilization device having a mobile anchor |
| US8246657B1 (en) | 2009-06-29 | 2012-08-21 | Nuvasive, Inc. | Spinal cross connector |
| US9011494B2 (en) | 2009-09-24 | 2015-04-21 | Warsaw Orthopedic, Inc. | Composite vertebral rod system and methods of use |
| AU2010303934B2 (en) | 2009-10-05 | 2014-03-27 | Roger P. Jackson | Polyaxial bone anchor with non-pivotable retainer and pop-on shank, some with friction fit |
| RU2573945C2 (ru) | 2009-12-31 | 2016-01-27 | Лдр Медикал | Крепежное устройство, межпозвонковый имплантат и приспособление для имплантирования |
| US20110184412A1 (en) * | 2010-01-28 | 2011-07-28 | Warsaw Orthopedic, Inc. | Pre-Assembled Construct With One or More Non-Rotating Connectors for Insertion Into a Patient |
| US9198696B1 (en) | 2010-05-27 | 2015-12-01 | Nuvasive, Inc. | Cross-connector and related methods |
| US9113960B2 (en) * | 2010-06-08 | 2015-08-25 | Globus Medical, Inc. | Conforming bone stabilization receiver |
| AU2011299558A1 (en) | 2010-09-08 | 2013-05-02 | Roger P. Jackson | Dynamic stabilization members with elastic and inelastic sections |
| EP2460482A1 (en) * | 2010-12-03 | 2012-06-06 | Zimmer Spine | Rod holding device |
| US9387013B1 (en) | 2011-03-01 | 2016-07-12 | Nuvasive, Inc. | Posterior cervical fixation system |
| US9247964B1 (en) | 2011-03-01 | 2016-02-02 | Nuasive, Inc. | Spinal Cross-connector |
| US8992579B1 (en) * | 2011-03-08 | 2015-03-31 | Nuvasive, Inc. | Lateral fixation constructs and related methods |
| KR101920618B1 (ko) | 2011-04-01 | 2018-11-22 | 신세스 게엠바하 | 후방 추골 플레이팅 시스템 |
| US8911479B2 (en) | 2012-01-10 | 2014-12-16 | Roger P. Jackson | Multi-start closures for open implants |
| US9060815B1 (en) | 2012-03-08 | 2015-06-23 | Nuvasive, Inc. | Systems and methods for performing spine surgery |
| US8894689B2 (en) * | 2012-04-20 | 2014-11-25 | Omni Acquisitions, Inc. | Stabilization rod assembly for spine fixation and process of making same |
| EP2662037B1 (en) * | 2012-05-09 | 2023-01-11 | CoLigne AG | Iliac connector, connector head and spinal fixation system |
| US10695097B2 (en) * | 2012-07-05 | 2020-06-30 | Spinesave Ag | Elastic rod having different degrees of stiffness for the surgical treatment of the spine |
| US8911478B2 (en) | 2012-11-21 | 2014-12-16 | Roger P. Jackson | Splay control closure for open bone anchor |
| US10058354B2 (en) | 2013-01-28 | 2018-08-28 | Roger P. Jackson | Pivotal bone anchor assembly with frictional shank head seating surfaces |
| US8852239B2 (en) | 2013-02-15 | 2014-10-07 | Roger P Jackson | Sagittal angle screw with integral shank and receiver |
| KR101555317B1 (ko) | 2013-09-11 | 2015-10-06 | 주식회사 솔고 바이오메디칼 | 스파이크를 가진 케이지 |
| US9044273B2 (en) | 2013-10-07 | 2015-06-02 | Intelligent Implant Systems, Llc | Polyaxial plate rod system and surgical procedure |
| US9517089B1 (en) | 2013-10-08 | 2016-12-13 | Nuvasive, Inc. | Bone anchor with offset rod connector |
| US9566092B2 (en) | 2013-10-29 | 2017-02-14 | Roger P. Jackson | Cervical bone anchor with collet retainer and outer locking sleeve |
| US9717533B2 (en) | 2013-12-12 | 2017-08-01 | Roger P. Jackson | Bone anchor closure pivot-splay control flange form guide and advancement structure |
| US9451993B2 (en) | 2014-01-09 | 2016-09-27 | Roger P. Jackson | Bi-radial pop-on cervical bone anchor |
| US10064658B2 (en) | 2014-06-04 | 2018-09-04 | Roger P. Jackson | Polyaxial bone anchor with insert guides |
| US9597119B2 (en) | 2014-06-04 | 2017-03-21 | Roger P. Jackson | Polyaxial bone anchor with polymer sleeve |
| FR3027207A1 (fr) * | 2014-10-15 | 2016-04-22 | Medicrea Int | Materiel d'osteosynthese vertebrale |
| US10548639B2 (en) * | 2015-04-24 | 2020-02-04 | K2M, Inc. | Tethering screw system |
| US10321939B2 (en) | 2016-05-18 | 2019-06-18 | Medos International Sarl | Implant connectors and related methods |
| US10517647B2 (en) | 2016-05-18 | 2019-12-31 | Medos International Sarl | Implant connectors and related methods |
| US10398476B2 (en) | 2016-12-13 | 2019-09-03 | Medos International Sàrl | Implant adapters and related methods |
| US10492835B2 (en) | 2016-12-19 | 2019-12-03 | Medos International Sàrl | Offset rods, offset rod connectors, and related methods |
| US10238432B2 (en) | 2017-02-10 | 2019-03-26 | Medos International Sàrl | Tandem rod connectors and related methods |
| US10966761B2 (en) | 2017-03-28 | 2021-04-06 | Medos International Sarl | Articulating implant connectors and related methods |
| US10561454B2 (en) | 2017-03-28 | 2020-02-18 | Medos International Sarl | Articulating implant connectors and related methods |
| KR101782455B1 (ko) * | 2017-04-26 | 2017-09-28 | 박영섭 | 경추 1번용 임플란트 장치 |
| US11076890B2 (en) | 2017-12-01 | 2021-08-03 | Medos International Sàrl | Rod-to-rod connectors having robust rod closure mechanisms and related methods |
| CN108577954B (zh) * | 2018-02-13 | 2020-04-10 | 哈尔滨医科大学 | 体内可吸收性腰椎限制性动态固定装置 |
| WO2020033870A1 (en) | 2018-08-09 | 2020-02-13 | Orthopediatrics Corp. | Apparatus and methods for modular and spooled vertebral anchors |
| CN111134911B (zh) * | 2018-11-06 | 2022-03-01 | 贵州澳特拉斯科技有限公司 | 仿生人工脊柱关节 |
| ES2999983T3 (en) | 2018-12-21 | 2025-02-27 | Xtant Medical Holdings Inc | Modular spine stabilization system and associated instruments |
| WO2020219016A1 (en) * | 2019-04-23 | 2020-10-29 | Warsaw Orthopedic, Inc. | Surgical system and method |
| US12349942B2 (en) | 2019-04-23 | 2025-07-08 | Warsaw Orthopedic, Inc. | Surgical system and method |
| US12274430B2 (en) | 2019-04-23 | 2025-04-15 | Warsaw Orthopedic, Inc. | Surgical system and method |
| US12082855B2 (en) | 2019-04-23 | 2024-09-10 | Warsaw Orthopedic, Inc. | Surgical system and method |
| US12383335B2 (en) | 2019-04-23 | 2025-08-12 | Warsaw Orthopedic, Inc. | Surgical system and method |
| WO2020219018A1 (en) * | 2019-04-23 | 2020-10-29 | Warsaw Orthopedic, Inc. | Surgical system and method |
| CN110090071A (zh) * | 2019-06-03 | 2019-08-06 | 山东航维骨科医疗器械股份有限公司 | 一种脊柱固定用连接套管 |
| US11389209B2 (en) | 2019-07-19 | 2022-07-19 | Medos International Sarl | Surgical plating systems, devices, and related methods |
| US11723691B2 (en) * | 2019-12-25 | 2023-08-15 | Apifix Ltd | Biasing device for spinal device |
| CN115334986A (zh) | 2020-04-09 | 2022-11-11 | 华沙整形外科股份有限公司 | 外科系统和方法 |
| US11331125B1 (en) | 2021-10-07 | 2022-05-17 | Ortho Inventions, Llc | Low profile rod-to-rod coupler |
| FR3148900A1 (fr) * | 2023-05-26 | 2024-11-29 | I.Ceram | Cavalier pour broche d’osteosynthese |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050085815A1 (en) * | 2003-10-17 | 2005-04-21 | Biedermann Motech Gmbh | Rod-shaped implant element for application in spine surgery or trauma surgery, stabilization apparatus comprising said rod-shaped implant element, and production method for the rod-shaped implant element |
| JP2005511974A (ja) * | 2001-12-07 | 2005-04-28 | マシーズ メディツィナルテヒニク アクチエンゲゼルシャフト | 減衰要素 |
| US20050277922A1 (en) * | 2004-06-09 | 2005-12-15 | Trieu Hai H | Systems and methods for flexible spinal stabilization |
| WO2006119447A1 (en) * | 2005-05-04 | 2006-11-09 | K2M, Inc. | Mobile spine stabilization device |
Family Cites Families (77)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4743260A (en) | 1985-06-10 | 1988-05-10 | Burton Charles V | Method for a flexible stabilization system for a vertebral column |
| FR2642645B1 (fr) | 1989-02-03 | 1992-08-14 | Breard Francis | Stabilisateur intervertebral souple ainsi que procede et appareillage pour le controle de sa tension avant mise en place sur le rachis |
| DE3936702C2 (de) * | 1989-11-03 | 1994-07-28 | Lutz Biedermann | Pedikelschraube und Korrektur- und Haltevorrichtung mit einer solchen Pedikelschraube |
| JP2754934B2 (ja) | 1991-03-28 | 1998-05-20 | 日本電気株式会社 | クランプ装置 |
| FR2676911B1 (fr) * | 1991-05-30 | 1998-03-06 | Psi Ste Civile Particuliere | Dispositif de stabilisation intervertebrale a amortisseurs. |
| EP0572790B1 (de) | 1992-06-04 | 1996-02-14 | Synthes AG, Chur | Osteosynthetisches Befestigungselement |
| EP0599847B1 (de) | 1992-06-25 | 1997-04-02 | Synthes AG, Chur | Osteosynthetische fixationsvorrichtung |
| US5437669A (en) | 1993-08-12 | 1995-08-01 | Amei Technologies Inc. | Spinal fixation systems with bifurcated connectors |
| FR2709246B1 (fr) * | 1993-08-27 | 1995-09-29 | Martin Jean Raymond | Orthèse vertébrale implantée dynamique. |
| JPH07163580A (ja) | 1993-12-15 | 1995-06-27 | Mizuho Ika Kogyo Kk | 側弯症前方矯正装置 |
| ATE180402T1 (de) * | 1994-02-28 | 1999-06-15 | Sulzer Orthopaedie Ag | Stabilisierung von benachbarten rückenwirbeln |
| FR2755844B1 (fr) | 1996-11-15 | 1999-01-29 | Stryker France Sa | Systeme d'osteosynthese a deformation elastique pour colonne vertebrale |
| CN100376219C (zh) * | 1998-07-06 | 2008-03-26 | 株式会社率高 | 脊椎固定装置 |
| FR2796828B1 (fr) | 1999-07-27 | 2001-10-19 | Dev Sed Soc Et | Dispositif de liaison intervertebrale implantable |
| FR2797179B1 (fr) | 1999-08-03 | 2002-03-08 | Michel Gau | Prothese nucleaire intervertebrale et son procede chirurgical d'implantation |
| FR2897259B1 (fr) | 2006-02-15 | 2008-05-09 | Ldr Medical Soc Par Actions Si | Cage intersomatique transforaminale a greffon de fusion intervetebrale et instrument d'implantation de la cage |
| FR2808995B1 (fr) | 2000-05-18 | 2003-02-21 | Aesculap Sa | Cage intersomatique a greffons unifies |
| US6447546B1 (en) | 2000-08-11 | 2002-09-10 | Dale G. Bramlet | Apparatus and method for fusing opposing spinal vertebrae |
| FR2823095B1 (fr) * | 2001-04-06 | 2004-02-06 | Ldr Medical | Dispositif d'osteosynthese du rachis et procede de mise en place |
| US20020160891A1 (en) * | 2001-04-26 | 2002-10-31 | Christopher Gallagher | Portable exercise station with variable resistance band |
| FR2824261B1 (fr) | 2001-05-04 | 2004-05-28 | Ldr Medical | Prothese de disque intervertebral et procede et outils de mise en place |
| US7862587B2 (en) | 2004-02-27 | 2011-01-04 | Jackson Roger P | Dynamic stabilization assemblies, tool set and method |
| US6770075B2 (en) | 2001-05-17 | 2004-08-03 | Robert S. Howland | Spinal fixation apparatus with enhanced axial support and methods for use |
| FR2827156B1 (fr) | 2001-07-13 | 2003-11-14 | Ldr Medical | Dispositif de cage vertebrale avec fixation modulaire |
| FR2827498B1 (fr) | 2001-07-18 | 2004-05-14 | Frederic Fortin | Dispositif de liaison vertebrale souple constitue d'elements palliant une deficience du rachis |
| CN2518470Y (zh) * | 2001-07-25 | 2002-10-30 | 史亚民 | 脊柱骨折内固定装置 |
| FR2831049B1 (fr) | 2001-10-18 | 2004-08-13 | Ldr Medical | Plaque pour dispositif d'osteosynthese et procede de premontage |
| FR2831048B1 (fr) | 2001-10-18 | 2004-09-17 | Ldr Medical | Dispositif d'osteosynthese a approche progressive et procede de premontage |
| US6783527B2 (en) | 2001-10-30 | 2004-08-31 | Sdgi Holdings, Inc. | Flexible spinal stabilization system and method |
| FR2831796B1 (fr) | 2001-11-06 | 2003-12-26 | Ldr Medical | Dispositif d'ancrage osseux pour prothese |
| FR2833151B1 (fr) * | 2001-12-12 | 2004-09-17 | Ldr Medical | Implant d'ancrage osseux a tete polyaxiale |
| US6966910B2 (en) | 2002-04-05 | 2005-11-22 | Stephen Ritland | Dynamic fixation device and method of use |
| KR100507615B1 (ko) * | 2002-09-16 | 2005-08-09 | 신수철 | 척추경 나사못 및 이를 갖는 척추경 나사못 조립체 |
| FR2846550B1 (fr) | 2002-11-05 | 2006-01-13 | Ldr Medical | Prothese de disque intervertebral |
| US20050171543A1 (en) * | 2003-05-02 | 2005-08-04 | Timm Jens P. | Spine stabilization systems and associated devices, assemblies and methods |
| US8092500B2 (en) | 2007-05-01 | 2012-01-10 | Jackson Roger P | Dynamic stabilization connecting member with floating core, compression spacer and over-mold |
| US20060186063A1 (en) | 2003-07-07 | 2006-08-24 | Wallcrown Limited | System for displaying wallpaper samples |
| FR2859095B1 (fr) | 2003-09-01 | 2006-05-12 | Ldr Medical | Implant d'ancrage osseux a tete polyaxiale et procede de mise en place de l'implant |
| KR101149963B1 (ko) * | 2003-09-04 | 2012-06-01 | 워쏘우 오르쏘페딕 인코포레이티드 | 척추 기형의 교정을 위한 로드-플레이트 전방 시스템 |
| US20050065516A1 (en) | 2003-09-24 | 2005-03-24 | Tae-Ahn Jahng | Method and apparatus for flexible fixation of a spine |
| US20050203513A1 (en) * | 2003-09-24 | 2005-09-15 | Tae-Ahn Jahng | Spinal stabilization device |
| KR101026942B1 (ko) * | 2003-09-29 | 2011-04-04 | 신세스 게엠바하 | 척추뼈몸통의 탄성안정을 위한 장치 |
| FR2860701B1 (fr) | 2003-10-09 | 2006-01-06 | Ldr Medical | Dispositif et procede de sectionnement de la lame d'une vertebre |
| US7083622B2 (en) | 2003-11-10 | 2006-08-01 | Simonson Peter M | Artificial facet joint and method |
| US8152810B2 (en) | 2004-11-23 | 2012-04-10 | Jackson Roger P | Spinal fixation tool set and method |
| US7160300B2 (en) | 2004-02-27 | 2007-01-09 | Jackson Roger P | Orthopedic implant rod reduction tool set and method |
| WO2005092218A1 (en) | 2004-02-27 | 2005-10-06 | Jackson Roger P | Orthopedic implant rod reduction tool set and method |
| DE102004011685A1 (de) * | 2004-03-09 | 2005-09-29 | Biedermann Motech Gmbh | Stabförmiges Element für die Anwendung in der Wirbelsäulen- oder Unfallchirurgie und Stabilisierungseinrichtung mit einem solchen stabförmigen Element |
| FR2869528B1 (fr) | 2004-04-28 | 2007-02-02 | Ldr Medical | Prothese de disque intervertebral |
| US7744634B2 (en) * | 2004-06-15 | 2010-06-29 | Warsaw Orthopedic, Inc. | Spinal rod system |
| US7854752B2 (en) * | 2004-08-09 | 2010-12-21 | Theken Spine, Llc | System and method for dynamic skeletal stabilization |
| WO2006057837A1 (en) | 2004-11-23 | 2006-06-01 | Jackson Roger P | Spinal fixation tool attachment structure |
| WO2006066053A1 (en) | 2004-12-15 | 2006-06-22 | Stryker Spine | Spinal rods having segments of different elastic properties and methods of using them |
| FR2879436B1 (fr) | 2004-12-22 | 2007-03-09 | Ldr Medical | Prothese de disque intervertebral |
| US7604654B2 (en) | 2005-02-22 | 2009-10-20 | Stryker Spine | Apparatus and method for dynamic vertebral stabilization |
| FR2887762B1 (fr) | 2005-06-29 | 2007-10-12 | Ldr Medical Soc Par Actions Si | Instrumentation d'insertion de prothese de disque intervertebral entre des vertebres |
| EP1757243B1 (en) * | 2005-08-24 | 2008-05-28 | BIEDERMANN MOTECH GmbH | Rod-shaped implant element for the application in spine surgery or trauma surgery and stabilization device with such a rod-shaped implant element |
| FR2891135B1 (fr) | 2005-09-23 | 2008-09-12 | Ldr Medical Sarl | Prothese de disque intervertebral |
| US7744630B2 (en) * | 2005-11-15 | 2010-06-29 | Zimmer Spine, Inc. | Facet repair and stabilization |
| FR2893838B1 (fr) | 2005-11-30 | 2008-08-08 | Ldr Medical Soc Par Actions Si | Prothese de disque intervertebral et instrumentation d'insertion de la prothese entre les vertebres |
| US20070270838A1 (en) * | 2006-05-08 | 2007-11-22 | Sdgi Holdings, Inc. | Dynamic spinal stabilization device with dampener |
| FR2910267B1 (fr) | 2006-12-21 | 2009-01-23 | Ldr Medical Soc Par Actions Si | Dispositif de soutien vertebral |
| US8465546B2 (en) | 2007-02-16 | 2013-06-18 | Ldr Medical | Intervertebral disc prosthesis insertion assemblies |
| US8465526B2 (en) * | 2007-04-30 | 2013-06-18 | Globus Medical, Inc. | Flexible spine stabilization system |
| FR2916956B1 (fr) | 2007-06-08 | 2012-12-14 | Ldr Medical | Cage intersomatique,prothese intervertebrale,dispositif d'ancrage et instrumentation d'implantation |
| FR2917287B1 (fr) | 2007-06-15 | 2010-09-03 | Ldr Medical | Prothese intervertebrale |
| FR2918555B1 (fr) | 2007-07-12 | 2010-04-02 | Ldr Medical | Dispositif et systeme de liaison rachidienne transverse |
| EP2047811B1 (en) * | 2007-10-11 | 2011-03-30 | BIEDERMANN MOTECH GmbH | Press-fit connection for fixing a rod in a surgical device, e.g. in a spinal stabilization device |
| US8043340B1 (en) * | 2008-06-09 | 2011-10-25 | Melvin Law | Dynamic spinal stabilization system |
| EP2160988B1 (en) | 2008-09-04 | 2012-12-26 | Biedermann Technologies GmbH & Co. KG | Rod-shaped implant in particular for stabilizing the spinal column and stabilization device including such a rod-shaped implant |
| US9603629B2 (en) | 2008-09-09 | 2017-03-28 | Intelligent Implant Systems Llc | Polyaxial screw assembly |
| US8202301B2 (en) * | 2009-04-24 | 2012-06-19 | Warsaw Orthopedic, Inc. | Dynamic spinal rod and implantation method |
| US8246657B1 (en) | 2009-06-29 | 2012-08-21 | Nuvasive, Inc. | Spinal cross connector |
| RU2573945C2 (ru) | 2009-12-31 | 2016-01-27 | Лдр Медикал | Крепежное устройство, межпозвонковый имплантат и приспособление для имплантирования |
| US20110184412A1 (en) | 2010-01-28 | 2011-07-28 | Warsaw Orthopedic, Inc. | Pre-Assembled Construct With One or More Non-Rotating Connectors for Insertion Into a Patient |
| FR2977139B1 (fr) | 2011-06-30 | 2014-08-22 | Ldr Medical | Implant inter-epineux et instrument d’implantation |
| FR3016793B1 (fr) | 2014-01-30 | 2021-05-07 | Ldr Medical | Dispositif d'ancrage pour implant spinal, implant spinal et instrumentation d'implantation |
-
2006
- 2006-12-21 FR FR0611198A patent/FR2910267B1/fr not_active Expired - Fee Related
-
2007
- 2007-12-17 US US11/958,285 patent/US8974497B2/en not_active Expired - Fee Related
- 2007-12-21 EP EP07866577A patent/EP2091451A2/en not_active Withdrawn
- 2007-12-21 WO PCT/IB2007/004061 patent/WO2008078163A2/en not_active Ceased
- 2007-12-21 KR KR1020097013313A patent/KR101446620B1/ko not_active Expired - Fee Related
- 2007-12-21 CN CN2007800475070A patent/CN101605501B/zh not_active Expired - Fee Related
- 2007-12-21 CA CA2669905A patent/CA2669905C/en not_active Expired - Fee Related
- 2007-12-21 AU AU2007337793A patent/AU2007337793B2/en not_active Ceased
- 2007-12-21 JP JP2009542260A patent/JP5322947B2/ja not_active Expired - Fee Related
- 2007-12-21 MX MX2009006788A patent/MX2009006788A/es active IP Right Grant
- 2007-12-21 BR BRPI0720494-9A2A patent/BRPI0720494A2/pt not_active Application Discontinuation
-
2015
- 2015-03-10 US US14/642,752 patent/US9730733B2/en active Active
-
2017
- 2017-08-15 US US15/677,310 patent/US10314620B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005511974A (ja) * | 2001-12-07 | 2005-04-28 | マシーズ メディツィナルテヒニク アクチエンゲゼルシャフト | 減衰要素 |
| US20050085815A1 (en) * | 2003-10-17 | 2005-04-21 | Biedermann Motech Gmbh | Rod-shaped implant element for application in spine surgery or trauma surgery, stabilization apparatus comprising said rod-shaped implant element, and production method for the rod-shaped implant element |
| JP2005118569A (ja) * | 2003-10-17 | 2005-05-12 | Biedermann Motech Gmbh | 骨固着要素を接続するためのロッド型の要素、骨固着要素を有する骨用の安定化装置、およびロッド型の要素を製造するための方法 |
| US20050277922A1 (en) * | 2004-06-09 | 2005-12-15 | Trieu Hai H | Systems and methods for flexible spinal stabilization |
| JP2008502448A (ja) * | 2004-06-09 | 2008-01-31 | ウォーソー・オーソペディック・インコーポレーテッド | 可撓性のある脊椎安定化システムおよび方法 |
| WO2006119447A1 (en) * | 2005-05-04 | 2006-11-09 | K2M, Inc. | Mobile spine stabilization device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080255617A1 (en) | 2008-10-16 |
| AU2007337793A1 (en) | 2008-07-03 |
| US8974497B2 (en) | 2015-03-10 |
| CA2669905C (en) | 2015-04-07 |
| EP2091451A2 (en) | 2009-08-26 |
| BRPI0720494A2 (pt) | 2014-02-04 |
| WO2008078163A3 (en) | 2008-11-13 |
| US20180036038A1 (en) | 2018-02-08 |
| WO2008078163A2 (en) | 2008-07-03 |
| MX2009006788A (es) | 2009-07-06 |
| US9730733B2 (en) | 2017-08-15 |
| US10314620B2 (en) | 2019-06-11 |
| KR20090101912A (ko) | 2009-09-29 |
| FR2910267A1 (fr) | 2008-06-27 |
| US20150182259A1 (en) | 2015-07-02 |
| CN101605501A (zh) | 2009-12-16 |
| CA2669905A1 (en) | 2008-07-03 |
| AU2007337793B2 (en) | 2013-04-04 |
| FR2910267B1 (fr) | 2009-01-23 |
| CN101605501B (zh) | 2011-04-20 |
| KR101446620B1 (ko) | 2014-10-01 |
| JP5322947B2 (ja) | 2013-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5322947B2 (ja) | 脊椎骨支持デバイス | |
| JP5260869B2 (ja) | 骨または椎骨のための動的安定化装置 | |
| EP2182871B1 (en) | Segmental orthopedic device for spinal elongation and for treatment of scoliosis | |
| US9561058B2 (en) | Iliac connector, connector head, spinal fixation system and method of stabilizing a spine | |
| EP2560566B1 (en) | Spinal implants and spinal fixings | |
| JP5193025B2 (ja) | 面関節インプラント架橋連結のシステム | |
| KR101466115B1 (ko) | 횡단 척추 결합 장치 및 시스템 | |
| US8740941B2 (en) | Pedicle based spinal stabilization with adjacent vertebral body support | |
| EP2645949B1 (en) | Rod holding device | |
| US20080154308A1 (en) | Spinal fixation system | |
| JPH07501735A (ja) | 脊髄の骨接合具 | |
| KR20090043569A (ko) | 척추 로드 연장기 및 그의 사용방법 | |
| CN101460108A (zh) | 用于互连脊柱移植装配组合体中的组件的装置 | |
| US9687280B1 (en) | Spinal repair implants and related methods | |
| US12167873B2 (en) | Spinal fixation assembly |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100812 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120619 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120914 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121219 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20130308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130716 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |