JP2010141819A - 通信装置、通信方法および通信プログラム - Google Patents
通信装置、通信方法および通信プログラム Download PDFInfo
- Publication number
- JP2010141819A JP2010141819A JP2008318641A JP2008318641A JP2010141819A JP 2010141819 A JP2010141819 A JP 2010141819A JP 2008318641 A JP2008318641 A JP 2008318641A JP 2008318641 A JP2008318641 A JP 2008318641A JP 2010141819 A JP2010141819 A JP 2010141819A
- Authority
- JP
- Japan
- Prior art keywords
- communication
- slave
- master
- field
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Landscapes
- Small-Scale Networks (AREA)
Abstract
【課題】LINプロトコルに基づく通信システムにおいてスレーブからマスタへの通知を実現する場合に、配線の増加やバス負荷の増大を抑えること。
【解決手段】通信装置60は、LINプロトコルに基づいて通信を行うマスタ61およびスレーブ62を備える。マスタ61は、識別子フィールドにおける所定のデータを参照することによりスレーブ62からの通知を検出する。スレーブ62は、同期バイトフィールドを検出した直後に所定のデータを出力することによりマスタ61への通信を自ら開始する。
【選択図】図1
【解決手段】通信装置60は、LINプロトコルに基づいて通信を行うマスタ61およびスレーブ62を備える。マスタ61は、識別子フィールドにおける所定のデータを参照することによりスレーブ62からの通知を検出する。スレーブ62は、同期バイトフィールドを検出した直後に所定のデータを出力することによりマスタ61への通信を自ら開始する。
【選択図】図1
Description
本発明は、通信装置、通信方法および通信プログラムに関し、特に、LIN(Local Interconnect Network)プロトコルに基づく通信装置、通信方法および通信プログラムに関する。
近年、自動車の車載システムにおいて電子制御の比重が増加している。特に、車載ECU(Electronic Control Unit、電子制御装置)システムにおいては、分散されたECUは通信ネットワークで接続され、相互に情報を交換する。また、ECUの個数の増加に伴って、車載ECUシステムの構成が複雑化したことから、CANまたはLINなどの標準化された通信プロトコルが採用されるに至っている。これらの通信プロトコルは、ECU間で適切に情報を交換するための方法を規定する。
LINプロトコルに基づく通信装置は、伝送路としてシングルワイヤ方式を採用し、1つのマスタおよび複数のスレーブから構成される。したがって、LINプロトコルは、車載サブシステム内のローカルネットワークを低コストで構築するために用いられる。
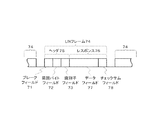
図8は、LINプロトコルにおけるフレームの構成を示す図である。図8を参照すると、LINフレーム74は、ヘッダ(Header)75およびレスポンス(Response)76から成る。マスタはヘッダ75を送信する。スレーブはヘッダ75を受信するとともに、受信したヘッダ75に対応したレスポンス76の送受信を行う。
ヘッダ75は、同期の開始をスレーブに通知するためのブレークフィールド(Break Field)71、同期を行うための同期バイトフィールド(Synch Byte Field)72、および、ネットワーク内のフレームを識別するための識別子フィールド(ID Field)73から成る。識別子フィールド73は、8ビット長の識別子および2ビットのパリティビットを有する。
レスポンス76は、1ないし8バイトのデータフィールド(Data Field)77、および、データの信頼性を確保するためのチェックサムフィールド(Checksum Field)78から成る。各フィールドのデータは、一般に、UART(Universal Asynchronous Receiver Transmitter)によって送受信される。
LINプロトコルは、低コストを特徴としていることから、主に、車載サブシステム内のローカルネットワークにおいて用いられる。しかし、LINプロトコルはシングルマスタ方式であることから、スレーブから自発的に通知する手段は提供されていない。すなわち、LINプロトコルに基づく通信システムにおいて、スレーブから自発的に通知する場合、または、スレーブが途中参加するタイミングを通知する場合には、LINプロトコルに規定されていない別の手段によって実現する必要がある。
そこで、一例として、マスタとスレーブとの間を別の伝送路で接続しておいて、スレーブからの通知をLINプロトコル以外の方法で通知するという方法が用いられる。また、マスタがLINプロトコルに基づく通信システムに参加していないスレーブに対して定期的にポーリングを実施し、スレーブがポーリングに対する応答をマスタに返却することによって、マスタがスレーブからの自発的な通知を認識する方法も用いられる。
なお、特許文献1において、フレームとフレームとの間に、スレーブからマスタに通知することができる時間を設ける方法が記載されている。
LINプロトコルに基づく通信システムに対してスレーブを追加する場合に、特許文献1に記載された方法を用いたときには、バスの負荷の増大を招くという問題がある。特許文献1に記載された方法によると、フレームとフレームとの間に、本来のLINプロトコルにおいて必要とされるウエイトに加えて、情報スロット分を見込んでフレーム間隔を決定する必要がある。したがって、通常のLINフレームよりもフレームサイズが長くなり、バス負荷が増加するからである。また、スレーブからの通知が頻繁に発生しない通信システムにおいては、かかる情報スロットは無駄になるという問題もある。
そこで、LINプロトコルに基づく通信システムにおいてスレーブからマスタへの通知を実現する場合に、配線の増加やバス負荷の増大を抑えることが課題となる。
本発明の第1の視点に係る通信装置は、LINプロトコルに基づいて通信を行うマスタおよびスレーブを備える通信装置であって、マスタは、識別子フィールドにおける所定のデータを参照することによりスレーブからの通知を検出し、スレーブは、同期バイトフィールドを検出した直後に所定のデータを出力することによりマスタへの通信を自ら開始する。
本発明の第2の視点に係る通信方法は、LINプロトコルに基づく通信方法であって、
マスタによって、識別子フィールドにおける所定のデータを参照することによりスレーブからの通知を検出する工程と、スレーブによって、同期バイトフィールドを検出した直後に所定のデータを出力することによりマスタへの通信を自ら開始する工程とを含む。
マスタによって、識別子フィールドにおける所定のデータを参照することによりスレーブからの通知を検出する工程と、スレーブによって、同期バイトフィールドを検出した直後に所定のデータを出力することによりマスタへの通信を自ら開始する工程とを含む。
本発明の第3の視点に係る通信プログラムは、LINプロトコルに基づく通信プログラムであって、識別子フィールドにおける所定のデータを参照することによりスレーブからの通知を検出する処理をマスタのECUに含まれるコンピュータに実行させるとともに、同期バイトフィールドを検出した直後に所定のデータを出力することによりマスタへの通信を自ら開始する処理をスレーブのECUに含まれるコンピュータに実行させる。
本発明に係る通信装置、方法およびプログラムによると、LINプロトコルに基づく通信システムにおいてスレーブからマスタへの通知を実現する場合に、配線の増加やバス負荷の増大を抑えることができる。LINプロトコルにおけるフレームの一部(一例として、識別子フィールド)をスレーブからの通知を行うためのフィールドとして利用することによって、従来のように、LINプロトコル以外の配線を設ける必要がない上、フレームサイズを大きくする必要もないからである。
また、本発明に係る通信装置、方法およびプログラムによると、既存のLINシステムに対するわずかな変更のみ(例えば、ハードウェアの変更を必要とせず、ソフトウェアの変更のみ)で、スレーブからマスタへの通知を実現することができる。
本発明の実施形態に係る通信装置について、図面を参照して説明する。図1は、本実施形態に係る通信装置の構成を示すブロック図である。図1を参照すると、通信装置60は、LINプロトコルに基づいて通信を行うマスタ61およびスレーブ62を備える。
マスタ61は、識別子フィールドにおける所定のデータを参照することによりスレーブ62からの通知を検出する。スレーブ62は、同期バイトフィールドを検出した直後に所定のデータを出力することによりマスタ61への通信を自ら開始する。
上記の所定のデータは、データ0x00であることが好ましい。また、車載LAN(非図示)は、上記の通信装置を備えることが好ましい。さらに、自動車(非図示)は、かかる車載LANによって制御されることが好ましい。
また、上記の通信装置60は、LINプロトコルに基づく通信プログラムによって実現してもよい。ここで、通信プログラムは、識別子フィールドにおける所定のデータを参照することによりスレーブ62からの通知を検出する処理をマスタ61のECUに含まれるコンピュータに実行させる。また、通信プログラムは、同期バイトフィールドを検出した直後に所定のデータを出力することによりマスタ61への通信を自ら開始する処理をスレーブ62のECUに含まれるコンピュータに、実行させる。
さらに、上記の通信プログラムは、勿論、コンピュータ読み取り可能な任意の記録媒体に記録することができる。
本発明の実施例について、図面を参照して説明する。
(構成)
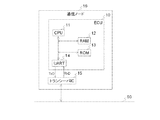
図2は、本発明の実施例における通信ノード(マスタまたはスレーブ)の構成を示すブロック図である。図2を参照すると、通信ノード16は、ECU10およびトランシーバIC15を備える。ECU10は、命令を実行するCPU11、命令の実行において使用されるRAM12、命令が格納されているROM13、および、通信を行うUART14を備える。トランシーバIC15は、UART14とLINバス50とを中継する。UART14とトランシーバIC15は、2本の送受信ライン(RxD、TxD)によって接続される。これによって、ECU10とLINバス50とのデータの送受信が可能となる。
図2は、本発明の実施例における通信ノード(マスタまたはスレーブ)の構成を示すブロック図である。図2を参照すると、通信ノード16は、ECU10およびトランシーバIC15を備える。ECU10は、命令を実行するCPU11、命令の実行において使用されるRAM12、命令が格納されているROM13、および、通信を行うUART14を備える。トランシーバIC15は、UART14とLINバス50とを中継する。UART14とトランシーバIC15は、2本の送受信ライン(RxD、TxD)によって接続される。これによって、ECU10とLINバス50とのデータの送受信が可能となる。
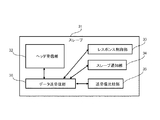
図3は、本発明の実施例におけるマスタの構成を示すブロック図である。マスタ21は、図2に示した通信ノード16として実現される。図3を参照すると、マスタ21は、ブレークフィールド、同期バイトフィールドおよび識別子フィールドを送信するためのヘッダ制御部22と、データフィールドおよびチェックサムフィールドを送受信するためのレスポンス制御部23と、各フィールドを送受信するためのデータ送受信部24と、送信したデータがバス上に正しく送信されているかをチェックする送受信比較部25とを備える。
ヘッダ制御部22は、さらに、スレーブ検出部26を備える。スレーブ検出部26は、ヘッダ制御機能における識別子フィールドの受信確認時において、スレーブからの通知の有無を判定する。ヘッダ制御部22およびレスポンス制御部23は、データ送受信部24に対し、データ送信および受信確認を指示する。データ送受信部24は、送受信比較部25に対し、上記のチェックを指示する。
図4は、本実施例におけるスレーブの構成を示すブロック図である。図4を参照すると、スレーブ31は、マスタからのヘッダを識別するヘッダ受信部32と、ヘッダに対応したデータフィールドおよびチェックサムフィールドを送受信するためのレスポンス制御部33と、各フィールドを送受信するためのデータ送受信部36と、送信したデータがバス上に正しく送信されているかをチェックする送受信比較部35と、同期バイトフィールドの検出後にスレーブ通知を出力するためのスレーブ通知部34とを備える。
ヘッダ受信部32、レスポンス制御部33およびスレーブ通知部34は、データ送受信部36に対し、データ送信および受信確認を指示する。データ送受信部36は、送受信比較部35に対し、上記のチェックを指示する。
(動作)
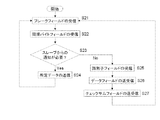
図5は、本実施例の通信方法を用いた場合の波形図である。一方、図6は、本実施例におけるマスタ21の動作を示すフローチャートである。図7は、本実施例におけるスレーブ31の動作を示すフローチャートである。図6および図7は、一例として、マスタ21が途中から通信装置に接続されるスレーブ31を予め検出済みである場合において、検出後にスレーブ31から通知されたデータを取得するときのフローチャートを示す。
図5は、本実施例の通信方法を用いた場合の波形図である。一方、図6は、本実施例におけるマスタ21の動作を示すフローチャートである。図7は、本実施例におけるスレーブ31の動作を示すフローチャートである。図6および図7は、一例として、マスタ21が途中から通信装置に接続されるスレーブ31を予め検出済みである場合において、検出後にスレーブ31から通知されたデータを取得するときのフローチャートを示す。
マスタ21は、フレーム送信を開始する場合には、ブレークフィールドを送信する(ステップS11)。LINプロトコルの典型的な実装例においては、LIN補助機能付きのUART14を用いて、13ビット以上のLowパルスを出力する。スレーブ31は、ブレークフィールドを受信して(ステップS21)、同期が開始される。
マスタ21は、ブレークフィールドの送信(ステップS11)後、UART14を用いて、1バイトデータ0x55を送信することにより、同期バイトフィールドの送信を行う(ステップS12)。スレーブ31は、同期バイトフィールドの受信(ステップS22)によって、データ0x55を認識する。また、スレーブ31は、受信したデータ0x55の立ち下がりエッジの間隔をタイマで計測し、正確に1ビットの幅を割り出すことによって、通信ボーレートを同期化するようにしてもよい。
図5の同期バイトフィールド42は、送信された同期バイトフィールドの波形を示す。1バイトのデータ0x55がマスタ21から出力され、スレーブ31からの出力はレセシブ状態となっている。このとき、LINバス50の波形はマスタ21の出力と同等となっている。
マスタ21は、各フレームを識別するための識別子として識別子フィールドを送信する(ステップS13)。
スレーブ31は、マスタ21に対して自ら通信を開始する必要があるか否かを判定し(ステップS23)、マスタ21に対する通信の開始が必要である場合には(ステップS23のYes)、所定データとして1バイトのデータ0x00を送信する(ステップS24)。
マスタ21は、識別子フィールドの送信(ステップS13)を開始した直後、スレーブ31からの所定のデータ0x00の受信の有無を判定する(ステップS14)。LINバス50に接続されたスレーブ31以外のスレーブは、識別子フィールドにおいてデータ0x00を受信するものの、識別子フィールドにおけるデータ0x00はパリティエラーの値であることから、これをエラーとみなすか、または無視する。
マスタ21は、所定のデータの受信の有無を確認して(ステップS14)、受信していない場合には(ステップS14のNo)、データフィールドの送受信(ステップS15)および、チェックサムフィールドの送受信を行う(ステップS16)。
図5の識別子フィールド43は、スレーブ31からデータ0x00を送信した場合における波形を示す。マスタ21からの任意のデータ(2ビットのパリティエラーを含む。)と、スレーブ31からのデータ0x00とが重なることにより、LINバス50の波形においてはデータ0x00が生じている。
マスタ21は、所定のデータを受信した場合には(ステップS14のYes)、ブレークフィールドを送信し(ステップS11)、通知を行ったスレーブ31に対応した識別子を指定して(ステップS12)、スレーブ31からの通知を受信する。
図5のブレークフィールド44および同期バイトフィールド45は、再びLINプロトコルに基づく通信を行った場合の波形を示す。マスタ21から13ビット以上のLow信号およびデータ0x55出力され、スレーブ31からの出力はレセシブ状態となっている。このときのLINバス50における波形はマスタ21からの出力と同等となっている。
スレーブ31は、マスタ21に対する通信の開始が必要でない場合には(ステップS23のNo)、通常のLINプロトコルにおける通信と同様に、識別子フィールドを受信し(ステップS25)、対象のフレームを認識する。
次に、スレーブ31は、データフィールドの送受信を行い(ステップS26)、チェックサムフィールドの送受信を行う(ステップS27)。また、スレーブ31は、ステップS21に戻って処理を繰り返す。
本実施例において、マスタ21は、識別子フィールドにおいてスレーブ31からの通知を検出するスレーブ検出部26を備える。また、スレーブ31は、同期バイトフィールドを検出した直後にデータ0x00を出力するスレーブ通知部34を備える。本実施例においては、従来のLINプロトコルに基づく通信を維持しつつ、LINプロトコルのフレームに対してスレーブ31からマスタ21への通信を開始する機能が埋め込まれる。
したがって、本実施例によると、フレームとフレームとの間に拡張した情報スロットを導入する必要がない。すなわち、本実施例によると、スレーブからマスタへの通信を開始する機能を少ないコストで実現することができる。
10、63、64 ECU(Electronic Control Unit)
11 CPU
12 RAM
13 ROM
14 UART(Universal Asynchronous Receiver Transmitter)
15 トランシーバIC
16 通信ノード
21、61 マスタ
22 ヘッダ制御部
23、33 レスポンス制御部
24、36 データ送受信部
25、35 送受信比較部
26 スレーブ検出部
31、62 スレーブ
32 ヘッダ受信部
34 スレーブ通知部
41、44、71 ブレークフィールド(Break Field)
42、45、72 同期バイトフィールド(Synch Byte Field)
43、73 識別子フィールド(ID Field)
50 LINバス
60 通信装置
74 LINフレーム
75 ヘッダ(Header)
76 レスポンス(Response)
77 データフィールド(Data Field)
78 チェックサムフィールド(Checksum Field)
11 CPU
12 RAM
13 ROM
14 UART(Universal Asynchronous Receiver Transmitter)
15 トランシーバIC
16 通信ノード
21、61 マスタ
22 ヘッダ制御部
23、33 レスポンス制御部
24、36 データ送受信部
25、35 送受信比較部
26 スレーブ検出部
31、62 スレーブ
32 ヘッダ受信部
34 スレーブ通知部
41、44、71 ブレークフィールド(Break Field)
42、45、72 同期バイトフィールド(Synch Byte Field)
43、73 識別子フィールド(ID Field)
50 LINバス
60 通信装置
74 LINフレーム
75 ヘッダ(Header)
76 レスポンス(Response)
77 データフィールド(Data Field)
78 チェックサムフィールド(Checksum Field)
Claims (8)
- LINプロトコルに基づいて通信を行うマスタ及びスレーブを備える通信装置であって、
前記マスタは、識別子フィールドにおける所定のデータを参照することにより前記スレーブからの通知を検出し、
前記スレーブは、同期バイトフィールドを検出した直後に前記所定のデータを出力することにより前記マスタへの通信を自ら開始することを特徴とする通信装置。 - 前記所定のデータは、データ0x00であることを特徴とする、請求項1に記載の通信装置。
- 請求項1又は2に記載の通信装置を備えることを特徴とする車載LAN。
- 請求項3に記載の車載LANによって制御されることを特徴とする自動車。
- LINプロトコルに基づく通信方法であって、
マスタにより、識別子フィールドにおける所定のデータを参照することによりスレーブからの通知を検出する工程と、
スレーブにより、同期バイトフィールドを検出した直後に前記所定のデータを出力することにより前記マスタへの通信を自ら開始する工程とを含むことを特徴とする通信方法。 - 前記所定のデータは、データ0x00であることを特徴とする、請求項5に記載の通信方法。
- LINプロトコルに基づく通信プログラムであって、
識別子フィールドにおける所定のデータを参照することによりスレーブからの通知を検出する処理をマスタのECUに含まれるコンピュータに実行させるとともに、
同期バイトフィールドを検出した直後に前記所定のデータを出力することにより前記マスタへの通信を自ら開始する処理をスレーブのECUに含まれるコンピュータに実行させることを特徴とする通信プログラム。 - 前記所定のデータは、データ0x00であることを特徴とする、請求項7に記載の通信プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008318641A JP2010141819A (ja) | 2008-12-15 | 2008-12-15 | 通信装置、通信方法および通信プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008318641A JP2010141819A (ja) | 2008-12-15 | 2008-12-15 | 通信装置、通信方法および通信プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010141819A true JP2010141819A (ja) | 2010-06-24 |
Family
ID=42351505
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008318641A Withdrawn JP2010141819A (ja) | 2008-12-15 | 2008-12-15 | 通信装置、通信方法および通信プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010141819A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013026835A (ja) * | 2011-07-21 | 2013-02-04 | Denso Corp | 通信装置 |
| JP2014131176A (ja) * | 2012-12-28 | 2014-07-10 | Toyota Motor Corp | 通信ノード、及び通信システム |
| KR101526686B1 (ko) * | 2013-09-23 | 2015-06-05 | 현대자동차주식회사 | 저비용 lin 시스템 및 이의 운용 방법 |
| CN110580037A (zh) * | 2019-09-27 | 2019-12-17 | 华勤通讯技术有限公司 | 一种uart通信系统及车载设备 |
-
2008
- 2008-12-15 JP JP2008318641A patent/JP2010141819A/ja not_active Withdrawn
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013026835A (ja) * | 2011-07-21 | 2013-02-04 | Denso Corp | 通信装置 |
| JP2014131176A (ja) * | 2012-12-28 | 2014-07-10 | Toyota Motor Corp | 通信ノード、及び通信システム |
| KR101526686B1 (ko) * | 2013-09-23 | 2015-06-05 | 현대자동차주식회사 | 저비용 lin 시스템 및 이의 운용 방법 |
| CN110580037A (zh) * | 2019-09-27 | 2019-12-17 | 华勤通讯技术有限公司 | 一种uart通信系统及车载设备 |
| CN110580037B (zh) * | 2019-09-27 | 2020-07-31 | 华勤通讯技术有限公司 | 一种uart通信系统及车载设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5510275B2 (ja) | 通信システム、マスタノード、スレーブノード | |
| KR101519793B1 (ko) | 차량용 네트워크 시스템 및 이 시스템 내 이종 통신 제어기의 데이터 전송 방법 | |
| JP5308802B2 (ja) | Canノード | |
| US8448035B2 (en) | Communication system adapting for car, communication apparatus adapting for car, and communication method adapting for car | |
| EP3048536B1 (en) | Two-wire communication system for high-speed data and power distribution | |
| JP4936204B2 (ja) | 通信システム及び通信方法 | |
| JP2008219555A (ja) | 車載用の中継接続ユニット | |
| JP2012080360A (ja) | 通信システム、マスタノード、スレーブノード | |
| JP2011030151A (ja) | 通信システムおよび通信ノード | |
| JP4594124B2 (ja) | 通信システム及び通信方法 | |
| JP2010141819A (ja) | 通信装置、通信方法および通信プログラム | |
| JP2008306648A (ja) | データ中継装置及びデータ中継方法並びに通信ネットワークシステム | |
| JP5018396B2 (ja) | 通信装置及び通信システム | |
| JP2016158105A (ja) | 通信システム | |
| JP5958335B2 (ja) | 通信ノード、及び通信システム | |
| CN112398901B (zh) | 执行双报文仲裁的方法和系统 | |
| KR20190008198A (ko) | 통신 장치, 통신 방법, 프로그램, 및, 통신 시스템 | |
| JP5396812B2 (ja) | 伝送制御装置および伝送制御方法 | |
| JP2011071579A (ja) | PCIExpress通信システム | |
| JP4890909B2 (ja) | 通信システム及び通信方法。 | |
| JP4315096B2 (ja) | ネットワークシステム | |
| JP4157064B2 (ja) | 同期開始信号検出装置、その検出方法、及びそのプログラム | |
| JP2010200091A (ja) | 通信システム及び通信方法 | |
| JP2008022079A (ja) | 通信ネットワークシステム及び受信診断結果の通知方法 | |
| JP2006033490A (ja) | データ通信装置及び通信システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20120306 |