以下、図面を参照しながら、本発明の好ましい実施形態について説明する。なお、図面中の断面を示す部分については、便宜上、ハッチングを省略するものとする。図1は、本発明の第1実施形態による補機駆動装置1を、内燃機関3(原動機)およびコンプレッサ4(補機)とともに概略的に示している。この内燃機関(以下「エンジン」という)3は、例えば、車両(図示せず)に駆動源として搭載されたガソリンエンジンであり、エンジン3には、電磁誘導式のクランク角センサ31(相対回転角度位置関係検出手段)が設けられている。このクランク角センサ31は、エンジン3のクランク軸3a(出力軸)のクランク角度位置を検出し、その検出信号を後述するECU25(相対回転角度位置関係検出手段、制御手段)に出力する。ECU25は、検出されたクランク角度位置に基づき、エンジン3の回転数(以下「エンジン回転数」という)NEを算出する。上記のコンプレッサ4は、車両に搭載されたエアコンディショナ用のものであり、その入力軸4aには、入力プーリ21が一体に設けられている。
図1に示すように、補機駆動装置1は、回転機11と、この回転機11の動作を制御するためのECU25およびパワードライブユニット(以下「PDU」という)26(制御手段)と、バッテリ27を有している。回転機11は、その後述する回転軸16に出力プーリ22が一体に設けられており、この出力プーリ22と上述した入力プーリ21には、ベルト23が巻き掛けられている。
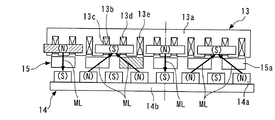
図1および図2に示すように、回転機11は、不動のケース12と、ケース12内に設けられたステータ13と、ケース12内にステータ13に対向するように設けられた第1ロータ14と、両者13,14の間に設けられた第2ロータ15と、回転軸16を有している。
ケース12は、円筒状の周壁12aと、この周壁12aの両端部に一体に設けられたドーナツ板状の一対の側壁12b,12cを有している。これらの側壁12bおよび12cの中央には、軸受け12dおよび12eがそれぞれ取り付けられており、これらの軸受け12dおよび12eには、クランク軸3aおよび回転軸16が回転自在にそれぞれ支持されている。クランク軸3aおよび回転軸16は、互いに同心状に配置されており、両者3a,16はいずれも、その一部がケース12内に収容され、残りの部分がケース12の外方に突出している。また、上記のステータ13、第2ロータ15および第1ロータ14は、回転軸16の径方向(以下、単に「径方向」という)に、外側からこの順で並んでおり、同心状に配置されている。
上記のステータ13は、回転磁界を発生させるものであり、図2および図3に示すように、鉄芯13a(電機子)と、この鉄芯13aに設けられたU相、V相およびW相のコイル13c,13d,13e(電機子)を有している。なお、図2では、便宜上、U相コイル13cのみを示している。鉄芯13aは、複数の鋼板を積層した円筒状のものであり、回転軸16の軸線方向(以下、単に「軸線方向」という)に延びており、ケース12の周壁12aの内周面に取り付けられている。また、鉄芯13aの内周面には、12個のスロット13bが形成されており、これらのスロット13bは、軸線方向に延びるとともに、回転軸16の周方向(以下、単に「周方向」という)に等間隔で並んでいる。上記のU相〜W相のコイル13c〜13eは、スロット13bに分布巻き(波巻き)で巻回されるとともに、PDU26を介して、バッテリ27に接続されている。このPDU26は、インバータなどからなる電気回路で構成されており、ECU25に接続されている。
以上の構成のステータ13では、バッテリ27からPDU26を介して電力が供給され、U相〜W相のコイル13c〜13eに電流が流れたときに、または、後述するように発電したときに、鉄芯13aの第1ロータ14側の端部に、4個の磁極が周方向に等間隔で発生する(図5参照)とともに、これらの磁極による回転磁界が周方向に回転する。以下、鉄芯13aに発生する磁極を「電機子磁極」という。また、周方向に隣り合う各2つの電機子磁極の極性は、互いに異なっている。なお、図5や後述する他の図面では、電機子磁極を、鉄芯13aやU相〜W相のコイル13c〜13eの上に、(N)および(S)で表記している。
図3に示すように、第1ロータ14は、8個の永久磁石14a(磁極)から成る磁極列を有している。これらの永久磁石14aは、周方向に等間隔で並んでおり、この磁極列は、ステータ13の鉄芯13aに対向している。各永久磁石14aは、軸線方向に延びており、その軸線方向の長さが、ステータ13の鉄芯13aのそれと同じに設定されている。
また、永久磁石14aは、リング状の取付部14bの外周面に取り付けられている。この取付部14bは、軟磁性体、例えば鉄または複数の鋼板を積層したもので構成されており、その内周面が、円板状のフランジ14cの外周面に取り付けられている。このフランジ14cは、前述した回転軸16に一体に設けられている。以上により、永久磁石14aを含む第1ロータ14は、回転軸16と一体に回転自在になっており、また、回転軸16、出力プーリ22、ベルト23および入力プーリ21を介して、コンプレッサ4に連結されている。さらに、上記のように軟磁性体で構成された取付部14bの外周面に永久磁石14aが取り付けられているので、各永久磁石14aには、ステータ13側の端部に、(N)または(S)の1つの磁極が現れる。なお、図3や後述する他の図面では、永久磁石14aの磁極を(N)および(S)で表記している。また、周方向に隣り合う各2つの永久磁石14aの極性は、互いに異なっている。
第2ロータ15は、6個のコア15a(軟磁性体)から成る単一の軟磁性体列を有している。これらのコア15aは、周方向に等間隔で並んでおり、この軟磁性体列は、ステータ13の鉄芯13aと第1ロータ14の磁極列との間に、それぞれ所定の間隔を隔てて配置されている。各コア15aは、軟磁性体、例えば複数の鋼板を積層したものであり、軸線方向に延びている。また、コア15aの軸線方向の長さは、永久磁石14aと同様、ステータ13の鉄芯13aのそれと同じに設定されている。さらに、コア15aは、円板状のフランジ15bの外端部に、軸線方向に若干延びる筒状の連結部15cを介して取り付けられている。このフランジ15bは、前述したクランク軸3aに一体に設けられている。以上により、コア15aを含む第2ロータ15は、クランク軸3aに直結されており、クランク軸3aと一体に回転自在になっている。なお、図3や図5では、便宜上、連結部15cおよびフランジ15bを省略している。
次に、以上の構成の回転機11の動作について説明する。前述したように、回転機11では、電機子磁極が4個、永久磁石14aの磁極(以下「磁石磁極」という)が8個、コア15aが6個である。すなわち、電機子磁極の数と磁石磁極の数とコア15aの数との比(以下「極数比」という)は、1:2.0:(1+2.0)/2に設定されている。このことと、前述した式(18)〜(20)から明らかなように、ステータ13に対して第1ロータ14や第2ロータ15が回転するのに伴ってU相〜W相のコイル13c〜13eにそれぞれ発生する逆起電圧(以下、それぞれ「U相逆起電圧Vcu」「V相逆起電圧Vcv」「W相逆起電圧Vcw」という)は、次式(33)、(34)および(35)で表される。
ここで、ψFは、磁石磁極の磁束の最大値である。また、θER1は、第1ロータ電気角であり、特定のU相コイル13c(以下「基準コイル」という)に対する第1ロータ14の特定の永久磁石14aの回転角度位置を、電気角度位置に換算した値である。すなわち、第1ロータ電気角θER1は、この特定の永久磁石14aの回転角度位置(以下「第1ロータ回転角θR1」という)に、電機子磁極の極対数、すなわち値2を乗算した値である。さらに、θER2は、第2ロータ電気角であり、上記の基準コイルに対する第2ロータ15の特定のコア15aの回転角度位置を、電気角度位置に換算した値である。すなわち、第2ロータ電気角θER2は、この特定のコア15aの回転角度位置(以下「第2ロータ回転角θR2」という)に、電機子磁極の極対数(値2)を乗算した値である。
また、上記の式(33)〜(35)におけるωER1は、第1ロータ電気角速度であり、第1ロータ電気角θER1の時間微分値、すなわち、ステータ13に対する第1ロータ14の角速度を電気角速度に換算した値である。さらに、ωER2は、第2ロータ電気角速度であり、第2ロータ電気角θER2の時間微分値、すなわち、ステータ13に対する第2ロータ15の角速度を電気角速度に換算した値である。
また、前述した極数比と前記式(21)〜(23)から明らかなように、U相、V相およびW相のコイル13c,13d,13eをそれぞれ流れる電流(以下、それぞれ「U相電流Iu」「V相電流Iv」「W相電流Iw」という)は、次式(36)、(37)および(38)で表される。
ここで、Iは、U相〜W相の電流Iu〜Iwの振幅(最大値)である。さらに、極数比と前記式(24)および(25)から明らかなように、基準コイルに対するステータ13の回転磁界のベクトルの電気角度位置θMFRは、次式(39)で表され、ステータ13に対する回転磁界の電気角速度(以下「磁界電気角速度ωMFR」という)は、次式(40)で表される。
このため、磁界電気角速度ωMFRと第1ロータ電気角速度ωER1と第2ロータ電気角速度ωER2の関係をいわゆる速度共線図で表すと、例えば図4のように示される。
また、ステータ13に供給された電力および磁界電気角速度ωMFRと等価のトルクを駆動用等価トルクTSEとすると、この駆動用等価トルクTSEと、第1ロータ14に伝達されるトルク(以下「第1ロータ伝達トルクTR1」という)と、第2ロータ15に伝達されるトルク(以下「第2ロータ伝達トルクTR2」という)との関係は、極数比と前記式(32)から明らかなように、次式(41)で表される。
上記の式(40)および(41)でそれぞれ表される電気角速度およびトルクの関係は、サンギヤおよびリングギヤのギヤ比が1:2である遊星歯車装置のサンギヤ、リングギヤおよびキャリアにおける回転速度およびトルクの関係とまったく同じである。
次に、ステータ13に供給された電力が、具体的にどのようにして動力に変換され、第1ロータ14や第2ロータ15から出力されるかについて説明する。まず、図5〜図7を参照しながら、第1ロータ14を回転不能に保持した状態でステータ13に電力を供給した場合について説明する。なお、図5〜図7では、便宜上、複数の構成要素の符号を省略している。このことは、後述する他の図面においても同様である。また、理解の容易化のために、図5〜図7に示される同じ1つの電機子磁極およびコア15aに、ハッチングを付している。
まず、図5(a)に示すように、ある1つのコア15aの中心と、ある1つの永久磁石14aの中心が、周方向に互いに一致するとともに、そのコア15aから3つ目のコア15aの中心と、その永久磁石14aから4つ目の永久磁石14aの中心が、周方向に互いに一致した状態から、回転磁界を、同図の左方に回転するように発生させる。その発生の開始時においては、互いに同じ極性を有する1つおきの電機子磁極の位置を、中心がコア15aと一致している各永久磁石14aの中心と周方向に一致させるとともに、この電機子磁極の極性をこの永久磁石14aの磁石磁極の極性と異ならせる。
前述したようにステータ13による回転磁界が第1ロータ14との間に発生することと、コア15aを有する第2ロータ15がステータ13と第1ロータ14の間に配置されていることから、電機子磁極および磁石磁極により、各コア15aは磁化される。このことと、隣り合う各コア15aの間に間隔が空いていることから、電機子磁極とコア15aと磁石磁極を結ぶような磁力線MLが発生する。なお、図5〜図7では、便宜上、鉄芯13aや取付部14bにおける磁力線MLを省略している。このことは、後述する他の図面においても同様である。
図5(a)に示す状態では、磁力線MLは、周方向の位置が互いに一致している電機子磁極、コア15aおよび磁石磁極を結び、かつ、これらの電機子磁極、コア15aおよび磁石磁極のそれぞれの周方向の各両側に隣り合う電機子磁極、コア15aおよび磁石磁極を結ぶように発生する。また、この状態では、磁力線MLが直線状であることにより、コア15aには、周方向に回転させるような磁力は作用しない。
そして、回転磁界の回転に伴って電機子磁極が図5(a)に示す位置から図5(b)に示す位置に回転すると、磁力線MLが曲がった状態になり、それに伴い、磁力線MLが直線状になるように、コア15aに磁力が作用する。この場合、磁力線MLで互いに結ばれた電機子磁極および磁石磁極を結ぶ直線に対して、磁力線MLが、このコア15aにおいて回転磁界の回転方向(以下「磁界回転方向」という)と逆方向に凸に曲がった状態になるため、上記の磁力は、コア15aを磁界回転方向に駆動するように作用する。このような磁力線MLによる磁力の作用により、コア15aは、磁界回転方向に駆動され、図5(c)に示す位置に回転し、コア15aが設けられた第2ロータ15も、磁界回転方向に回転する。なお、図5(b)および(c)における破線は、磁力線MLの磁束量が極めて小さく、電機子磁極とコア15aと磁石磁極の間の磁気的なつながりが弱いことを表している。このことは、後述する他の図面においても同様である。
また、回転磁界がさらに回転するのに伴い、上述した一連の動作、すなわち、「磁力線MLがコア15aにおいて磁界回転方向と逆方向に凸に曲がる→磁力線MLが直線状になるようにコア15aに磁力が作用する→コア15aおよび第2ロータ15が、磁界回転方向に回転する」という動作が、図6(a)〜(d)、図7(a)および(b)に示すように、繰り返し行われる。以上のように、第1ロータ14を回転不能に保持した状態で、ステータ13に電力を供給した場合には、上述したような磁力線MLによる磁力の作用によって、ステータ13に供給された電力は動力に変換され、その動力が第2ロータ15から出力される。
また、図8は、図5(a)の状態から電機子磁極が電気角2πだけ回転した状態を示しており、図8と図5(a)の比較から明らかなように、コア15aは、電機子磁極に対して1/3の回転角度だけ、同方向に回転していることが分かる。この結果は、前記式(40)において、ωER1=0とすることによって、ωER2=ωMFR/3が得られることと合致する。
次に、図9〜図11を参照しながら、第2ロータ15を回転不能に保持した状態で、ステータ13に電力を供給した場合の動作について説明する。なお、図9〜図11では、図5〜図7と同様、理解の容易化のために、同じ1つの電機子磁極および永久磁石14aに、ハッチングを付している。まず、図9(a)に示すように、前述した図5(a)の場合と同様、ある1つのコア15aの中心と、ある1つの永久磁石14aの中心が、周方向に互いに一致するとともに、そのコア15aから3つ目のコア15aの中心と、その永久磁石14aから4つ目の永久磁石14aの中心が、周方向に互いに一致した状態から、回転磁界を、同図の左方に回転するように発生させる。その発生の開始時においては、互いに同じ極性を有する1つおきの電機子磁極の位置を、中心がコア15aと一致している各永久磁石14aの中心と周方向に一致させるとともに、この電機子磁極の極性をこの永久磁石14aの磁石磁極の極性と異ならせる。
図9(a)に示す状態では、図5(a)の場合と同様、磁力線MLは、周方向の位置が互いに一致している電機子磁極、コア15aおよび磁石磁極を結び、かつ、これらの電機子磁極、コア15aおよび磁石磁極のそれぞれの周方向の各両側に隣り合う電機子磁極、コア15aおよび磁石磁極を結ぶように発生する。また、この状態では、磁力線MLが直線状であることにより、永久磁石14aには、周方向に回転させるような磁力は作用しない。
そして、回転磁界の回転に伴って電機子磁極が図9(a)に示す位置から図9(b)に示す位置に回転すると、磁力線MLが曲がった状態になり、それに伴い、磁力線MLが直線状になるように、永久磁石14aに磁力が作用する。この場合、この永久磁石14aが、磁力線MLで互いに結ばれた電機子磁極およびコア15aの延長線上よりも磁界回転方向に進んだ位置にあるため、上記の磁力は、この延長線上に永久磁石14aを位置させるように、すなわち、永久磁石14aを磁界回転方向と逆方向に駆動するように作用する。このような磁力線MLによる磁力の作用により、永久磁石14aは、磁界回転方向と逆方向に駆動され、図9(c)に示す位置に回転し、永久磁石14aが設けられた第1ロータ14も、磁界回転方向と逆方向に回転する。
また、回転磁界がさらに回転するのに伴い、上述した一連の動作、すなわち、「磁力線MLが曲がり、磁力線MLで互いに結ばれた電機子磁極およびコア15aの延長線上よりも、永久磁石14aが磁界回転方向に進んだ位置に位置する→磁力線MLが直線状になるように永久磁石14aに磁力が作用する→永久磁石14aおよび第1ロータ14が、磁界回転方向と逆方向に回転する」という動作が、図10(a)〜(d)、図11(a)および(b)に示すように、繰り返し行われる。以上のように、第2ロータ15を回転不能に保持した状態で、ステータ13に電力を供給した場合には、上述したような磁力線MLによる磁力の作用によって、ステータ13に供給された電力は動力に変換され、その動力が第1ロータ14から出力される。
また、図11(b)は、図9(a)の状態から電機子磁極が電気角2πだけ回転した状態を示しており、図11(b)と図9(a)の比較から明らかなように、永久磁石14aは、電機子磁極に対して1/2の回転角度だけ、逆方向に回転していることが分かる。この結果は、前記式(40)において、ωER2=0とすることによって、−ωER1=ωMFR/2が得られることと合致する。
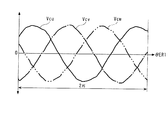
また、図12および図13は、電機子磁極、コア15aおよび永久磁石14aの数を、値16、値18および値20にそれぞれ設定し、第1ロータ14を回転不能に保持するとともに、ステータ13への電力の供給により第2ロータ15から動力を出力した場合におけるシミュレーション結果を示している。図12は、第2ロータ電気角θER2が値0〜2πまで変化する間におけるU相〜W相の逆起電圧Vcu〜Vcwの推移の一例を示している。
この場合、第1ロータ14が回転不能に保持されていることと、電機子磁極および磁石磁極の極対数がそれぞれ値8および値10であることと、前記式(25)から、磁界電気角速度ωMFR、第1および第2のロータ電気角速度ωER1,ωER2の間の関係は、ωMFR=2.25・ωER2で表される。図12に示すように、第2ロータ電気角θER2が値0〜2πまで変化する間に、U相〜W相の逆起電圧Vcu〜Vcwは、ほぼ2.25周期分、発生している。また、図12は、第2ロータ15から見たU相〜W相の逆起電圧Vcu〜Vcwの変化状態を示しており、同図に示すように、これらの逆起電圧は、第2ロータ電気角θER2を横軸として、W相逆起電圧Vcw、V相逆起電圧VcvおよびU相逆起電圧Vcuの順に並んでおり、このことは、第2ロータ15が磁界回転方向に回転していることを表す。以上のような図12に示すシミュレーション結果は、上述した式(25)に基づくωMFR=2.25・ωER2の関係と合致する。
さらに、図13は、駆動用等価トルクTSE、第1および第2のロータ伝達トルクTR1,TR2の推移の一例を示している。この場合、電機子磁極および磁石磁極の極対数がそれぞれ値8および値10であることと、前記式(32)から、駆動用等価トルクTSE、第1および第2のロータ伝達トルクTR1,TR2の間の関係は、TSE=TR1/1.25=−TR2/2.25で表される。図13に示すように、駆動用等価トルクTSEは、ほぼ−TREFに、第1ロータ伝達トルクTR1は、ほぼ1.25・(−TREF)に、第2ロータ伝達トルクTR2は、ほぼ2.25・TREFになっている。このTREFは所定のトルク値(例えば200Nm)である。このような図13に示すシミュレーション結果は、上述した式(32)に基づくTSE=TR1/1.25=−TR2/2.25の関係と合致する。
また、図14および図15は、電機子磁極、コア15aおよび永久磁石14aの数を図12および図13の場合と同様に設定し、第1ロータ14に代えて第2ロータ15を回転不能に保持するとともに、ステータ13への電力の供給により第1ロータ14から動力を出力した場合におけるシミュレーション結果を示している。図14は、第1ロータ電気角θER1が値0〜2πまで変化する間におけるU相〜W相の逆起電圧Vcu〜Vcwの推移の一例を示している。
この場合、第2ロータ15が回転不能に保持されていることと、電機子磁極および磁石磁極の極対数がそれぞれ値8および値10であることと、前記式(25)から、磁界電気角速度ωMFR、第1および第2のロータ電気角速度ωER1,ωER2の間の関係は、ωMFR=−1.25・ωER1で表される。図14に示すように、第1ロータ電気角θER1が値0〜2πまで変化する間に、U相〜W相の逆起電圧Vcu〜Vcwは、ほぼ1.25周期分、発生している。また、図14は、第1ロータ14から見たU相〜W相の逆起電圧Vcu〜Vcwの変化状態を示しており、同図に示すように、これらの逆起電圧は、第1ロータ電気角θER1を横軸として、U相逆起電圧Vcu、V相逆起電圧VcvおよびW相逆起電圧Vcwの順に並んでおり、このことは、第1ロータ14が磁界回転方向と逆方向に回転していることを表す。以上のような図14に示すシミュレーション結果は、上述した式(25)に基づくωMFR=−1.25・ωER1の関係と合致する。
さらに、図15は、駆動用等価トルクTSE、第1および第2のロータ伝達トルクTR1,TR2の推移の一例を示している。この場合にも、図13の場合と同様、式(32)から、駆動用等価トルクTSE、第1および第2のロータ伝達トルクTR1,TR2の間の関係は、TSE=TR1/1.25=−TR2/2.25で表される。図15に示すように、駆動用等価トルクTSEは、ほぼTREFに、第1ロータ伝達トルクTR1は、ほぼ1.25・TREFに、第2ロータ伝達トルクTR2は、ほぼ−2.25・TREFになっている。このような図15に示すシミュレーション結果は、上述した式(32)に基づくTSE=TR1/1.25=−TR2/2.25の関係と合致する。
以上のように、回転機11では、ステータ13への電力供給により回転磁界を発生させると、前述した磁石磁極とコア15aと電機子磁極を結ぶような磁力線MLが発生し、この磁力線MLによる磁力の作用によって、ステータ13に供給された電力は動力に変換され、その動力が、第1ロータ14や第2ロータ15から出力される。この場合、磁界電気角速度ωMFR、第1および第2のロータ電気角速度ωER1,ωER2の間に、前記式(40)に示す関係が成立するとともに、駆動用等価トルクTSE、第1および第2のロータ伝達トルクTR1,TR2の間に、前記式(41)に示す関係が成立する。
このため、ステータ13に電力を供給していない状態で、第1および第2のロータ14,15の少なくとも一方に動力を入力することにより、この少なくとも一方をステータ13に対して回転させると、ステータ13において、発電が行われるとともに、回転磁界が発生し、この場合にも、磁石磁極と軟磁性体と電機子磁極を結ぶような磁力線MLが発生するとともに、この磁力線MLによる磁力の作用によって、式(40)に示す電気角速度の関係と式(41)に示すトルクの関係が成立する。
すなわち、発電した電力および磁界電気角速度ωMFRと等価のトルクを発電用等価トルクTGEとすると、この発電用等価トルクTGE、第1および第2のロータ伝達トルクTR1,TR2の間にも、式(41)に示す関係が成立する。以上から明らかなように、回転機11は、遊星歯車装置と一般的な1ロータタイプの回転機とを組み合わせた装置と同じ機能を有する。
また、回転機11には、電磁誘導式の回転角センサ32(相対回転角度位置関係検出手段)が設けられており、この回転角センサ32は、前述した第1ロータ回転角θR1を検出し、その検出信号をECU25に出力する。さらに、図32に示すように、回転機11には、第1電流センサ33および第2電流センサ34が設けられている。これらの第1および第2の電流センサ33,34はそれぞれ、前述したU相電流IuおよびV相電流Ivを表す検出信号をECU25に出力する。
ECU25は、I/Oインターフェース、CPU、RAMおよびROMなどからなるマイクロコンピュータで構成されている。また、ECU25は、第2ロータ15がクランク軸3aに直結されていることから、検出されたクランク角度位置に基づいて、前述した第2ロータ回転角θR2を算出するとともに、第1ロータ14がコンプレッサ4の入力軸4aに連結されていることから、検出された第1ロータ回転角θR1に基づいて、コンプレッサ4の入力軸4aの回転数(以下「コンプレッサ回転数NA」という)を算出する。
さらに、ECU25は、第1および第2のロータ回転角θR1,θR2に応じ、前記式(39)に基づき、回転磁界を制御することによって、回転機11の動作を制御する。具体的には、図32に示すように、ECU25は、目標電流算出部25a、電気角変換器25b(相対回転角度位置関係検出手段)、電流座標変換器25c、偏差算出部25d、電流制御器25e、および電圧座標変換器25fを有している。上記の回転磁界の制御は、いわゆるベクトル制御でU相〜W相の電流Iu,Iv,Iwを制御することによって、行われる。
上記の目標電流算出部25aは、後述するd軸電流Idおよびq軸電流Iqの目標値(以下、それぞれ「目標d軸電流Id_tar」「目標q軸電流Iq_tar」という)を算出するとともに、算出した目標d軸電流Id_tarおよび目標q軸電流Iq_tarを、偏差算出部25dに出力する。なお、これらの目標d軸およびq軸の電流Id_tar,Iq_tarは、例えば、第1ロータ14に作用するコンプレッサ4の負荷などに応じて算出される。
電気角変換器25bには、検出(算出)された第1および第2のロータ回転角θR1,θR2が入力される。電気角変換器25bは、入力された第1および第2のロータ回転角θR1,θR2に、電機子磁極の極対数(値2)を乗算することによって、前述した第1および第2のロータ電気角θER1,θER2を算出する。また、算出した第1および第2のロータ電気角θER1,θER2を、電流座標変換器25cおよび電圧座標変換器25fに出力する。
電流座標変換器25cには、第1および第2のロータ電気角θER1,θER2に加え、検出されたU相およびV相の電流Iu,Ivが入力される。電流座標変換器25cは、入力されたU相およびV相の電流Iu,Ivと第1および第2のロータ電気角θER1,θER2に基づいて、そのときどきの3相交流座標上でのU相〜W相の電流Iu〜Iwを、dq座標上でのd軸電流Idおよびq軸電流Iqに変換する。このdq座標は、(3・θER2−2・θER1)をd軸とし、このd軸に直交する軸をq軸として、(3・ωER2−2・ωER1)で回転するものである。具体的には、d軸電流Idおよびq軸電流Iqは、次式(42)によって算出される。また、電流座標変換器25cは、算出したd軸電流Idおよびq軸電流Iqを偏差算出部25dに出力する。
偏差算出部25dは、入力された目標d軸電流Id_tarとd軸電流Idとの偏差(以下「d軸電流偏差dId」という)を算出するとともに、入力された目標q軸電流Iq_tarとq軸電流Iqとの偏差(以下「q軸電流偏差dIq」という)を算出する。また、算出したd軸電流偏差dIdおよびq軸電流偏差dIqを、電流制御器25eに出力する。
電流制御器25eは、入力されたd軸電流偏差dIdおよびq軸電流偏差dIqに基づき、所定のフィードバック制御アルゴリズム、例えばPI制御アルゴリズムによって、d軸電圧Vdおよびq軸電圧Vqを算出する。これにより、d軸電圧Vdは、d軸電流Idが目標d軸電流Id_tarになるような値に算出され、q軸電圧Vqは、q軸電流Iqが目標q軸電流Iq_tarになるような値に算出される。また、算出したd軸およびq軸の電圧Vd,Vqを、電圧座標変換器25fに出力する。
電圧座標変換器25fは、入力されたd軸電圧Vdおよびq軸電圧Vqを、入力された第1および第2のロータ電気角θER1,θER2に基づいて、3相交流座標上でのU相〜W相の電圧Vu,Vv,Vwの指令値(以下、それぞれ「U相電圧指令値Vu_cmd」「V相電圧指令値Vv_cmd」「W相電圧指令値Vw_cmd」という)に変換する。具体的には、U相〜W相の電圧指令値Vu_cmd〜Vw_cmdは、次式(43)によって算出される。また、電圧座標変換器25fは、算出したU相〜W相の電圧指令値Vu_cmd〜Vw_cmdを前述したPDU26に出力する。
これに伴い、PDU26は、U相〜W相の電圧Vu〜Vwを、U相〜W相の電圧指令値Vu_cmd〜Vw_cmdにそれぞれなるように回転機11に印可する。これにより、U相〜W相の電流Iu〜Iwが制御され、この場合、これらの電流Iu〜Iwは、前記式(36)〜(38)でそれぞれ表される。また、電流の振幅Iは、目標d軸電流Id_tarおよび目標q軸電流Iq_tarに基づいて定まる。
以上のようなECU25による制御によって、磁界電気角度位置θMFRは、前記式(39)が成立するように制御され、磁界電気角速度ωMFRは、前記式(40)が成立するように制御される。
以上の構成の補機駆動装置1は、その動作モードとして、エンジン3の停止中および運転中にそれぞれコンプレッサ4を駆動する「ENG停止モード」および「ENG運転モード」を有している。以下、これらの動作モードについて、ENG停止モードから順に説明する。
・ENG停止モード
図16は、このENG停止モード中における各種の回転要素の回転数の関係の一例を、各種の回転要素のトルクの関係の一例とともに示している。前述したように第2ロータ15がクランク軸3aに直結されているので、第2ロータ15の回転数とエンジン回転数NEは、互いに等しい。また、第1ロータ14が、回転軸16、出力プーリ22、ベルト23および入力プーリ21を介して、コンプレッサ4の入力軸4aに連結されているので、両プーリ22,21による変速を無視すれば、第1ロータ14の回転数と、コンプレッサ回転数NAは、互いに等しい。これらのことと、前述した回転機11の機能から、ENG停止モード中における回転磁界、第1および第2のロータ14,15の間の回転数の関係と、エンジン回転数NEとコンプレッサ回転数NAの関係は、例えば図16のように示される。
なお、図16では、図4と同様、値0を示す横線に交わる縦線上に表された白丸と横線との隔たりが、縦線の一端に表記されたパラメータの回転数に相当しており、便宜上、エンジン回転数NEおよびコンプレッサ回転数NAを表す符号を、白丸の付近に表記している。また、図16では、正転方向および逆転方向を、「+」および「−」でそれぞれ表している。これらのことは、後述する他の速度共線図についても同様である。
ENG停止モード中、第2ロータ15には、エンジン3のフリクション(以下「エンジンフリクションTEF」という)が作用しており、このエンジンフリクションTEFは、コンプレッサ4を駆動するのに必要なトルクよりも非常に大きい。そのような状態で、ECU25によるPDU26の制御によって、ステータ13に電力を供給し、回転磁界を逆転させる。これにより、ステータ13への電力供給に伴って発生した駆動用等価トルクTSEは、第2ロータ15に作用するエンジンフリクションTEFを反力として、第1ロータ14に伝達され、第1ロータ14を正転させるように作用する(図16参照)。また、第1ロータ14に伝達された第1ロータ伝達トルクTR1は、回転軸16、出力プーリ22、ベルト23および入力プーリ21を介して、コンプレッサ4に伝達され、その結果、コンプレッサ4の入力軸4aが正転する。この場合、エンジン回転数NEが値0になり、ステータ13に供給された電力はすべて、動力としてコンプレッサ4に伝達される。
さらに、図16に示すように、ENG停止モード中、前記式(40)、第1および第2のロータ回転角θR1,θR2に応じ、回転磁界の回転数を制御することによって、コンプレッサ回転数NAが、コンプレッサ4の作動に適した所定値NREFに保持される。以上のように、ENG停止モード中、コンプレッサ4は、回転機11のみを駆動源として駆動される。
・ENG運転モード
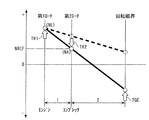
このENG運転モード中、基本的には、クランク軸3aから第2ロータ15に伝達される動力の一部を用いて、ステータ13で発電を行う。図17(a)は、ENG運転モードの開始時における各種の回転要素の回転数の関係を、各種の回転要素のトルクの関係とともに示している。同図に示すように、ENG運転モードの開始時、第2ロータ15がクランク軸3aとともに正転するのに対し、第1ロータ14が停止しているので、第1および第2のロータ14,15の回転数によって定まる回転磁界の回転方向は、正転方向になる。
このため、エンジン3から第2ロータ15に伝達された第2ロータ伝達トルクTR2は、発電用等価トルクTGEを反力として、第1ロータ14を介してコンプレッサ4に伝達され、コンプレッサ4が駆動される(図17参照)。換言すれば、第2ロータ15に伝達されたエンジン3の動力の一部が、ステータ13に電力として分配されるとともに、残りが、第1ロータ14を介してコンプレッサ4に分配される。また、正転している回転磁界の回転数を低下させることにより、ステータ13に電力として分配されるエンジン3の動力を低下させることによって、第1ロータ14を介してコンプレッサ4に分配されるエンジン3の動力を増大させる。以上の結果、図17(b)に示すように、コンプレッサ回転数NAが、図17(a)に示す値0の状態から上昇する。
以上のように、ENG運転モード中、エンジン3は、コンプレッサ4の駆動源として用いられ、回転機11は、エンジン3の動力をコンプレッサ4に伝達する伝達機構として機能する。また、ステータ13で上述したように発電した電力は、バッテリ27に充電され、それにより、次回のENG停止モード中に、バッテリ27に充電した電力を用いて、コンプレッサ4を駆動することができる。
さらに、図17(b)に示すように、ENG運転モード中、ENG停止モードと同様、前記式(40)、第1および第2のロータ回転角θR1,θR2に応じ、回転磁界の回転数を制御することによって、コンプレッサ回転数NAが、コンプレッサ4の作動に適した所定値NREFに保持される。この場合、図17(b)に実線で示す速度共線図と破線で示す速度共線図から明らかなように、エンジン回転数NEの高低にかかわらず、コンプレッサ回転数NAを、コンプレッサ4の作動に適した所定値NREFに保持することができる。
また、図18に示すように、ENG運転モード中、エンジン回転数NEが非常に低い場合には、同図に破線で示すように、発電に伴って発生した回転磁界の回転数を制御しても、コンプレッサ回転数NAを所定値NREFまで上昇させることができない場合がある。そのような場合には、ステータ13に電力を供給し、回転磁界を逆転させる。これにより、エンジン3から第2ロータ15に伝達された第2ロータ伝達トルクTR2は、駆動用等価トルクTSEを反力として、第1ロータ14を介してコンプレッサ4に伝達され、コンプレッサ4が駆動される。さらに、逆転する回転磁界の回転数を制御することによって、図18に実線で示すように、コンプレッサ回転数NAを、所定値NREFに上昇させ、保持することができる。
また、エンジン運転モード中、コンプレッサ4を停止するときには、第1ロータ14の回転数が値0になればよいので、前記式(40)から明らかなように、回転磁界の回転数を、エンジン回転数NEの3倍になるように制御する。さらに、発電用等価トルクTGEを、第1ロータ14に作用するコンプレッサ4のフリクションのトルク相当値の1/2になるように制御する。以上により、第1ロータ14の回転数が値0に制御され、コンプレッサ4が停止されるとともに、回転機11に入力されたエンジン3の動力のほぼ100%が、電力に変換される。
以上のように、本実施形態によれば、回転機11において、電機子磁極の極対数に対する永久磁石14aの磁石磁極の極対数の比(以下「極対数比α」という)が値2.0に設定されている。これにより、前記式(41)から明らかなように、コンプレッサ4を駆動するためには、駆動用等価トルクTSEおよび発電用等価トルクTGEを、第1ロータ14を介してコンプレッサ4に伝達されるトルクの1/2の大きさに制御すれば足りる。一方、前述した従来の補機駆動装置を用いてコンプレッサを駆動するためには、駆動用等価トルク(発電用等価トルク)と、第1ロータに伝達されるトルクと、第2ロータに伝達されるトルクとの比が1:1:2であるので、駆動用等価トルク(発電用等価トルク)を、第1ロータを介してコンプレッサ4に伝達されるトルクと同じ大きさに制御しなければならない。以上のように、従来の場合と比較して、駆動用等価トルクTSEおよび発電用等価トルクTGEを低減できるので、ステータ13の小型化を図ることができ、ひいては、補機駆動装置1の小型化およびコストの削減を図ることができる。
また、従来の場合と異なり、コア15aから成る単一の軟磁性体列によって回転機11を作動させ、コンプレッサ4を駆動することができるので、回転機11の構成を単純化でき、ひいては、補機駆動装置1の構成の単純化と、さらなるコストの削減を図ることができる。
さらに、第1および第2のロータ電気角θER1,θER2を算出するとともに、算出された両電気角θER1,θER2に応じ、回転磁界の磁界電気角度位置θMFRを、前記式(39)が成立するように制御するので、回転機11の適正な動作を確保でき、ひいては、補機駆動装置1の適正な動作を確保することができる。
次に、図19を参照しながら、本発明の第2実施形態による補機駆動装置1Aについて説明する。この補機駆動装置1Aは、上述した第1実施形態と比較して、回転機11Aの構成が主に異なっている。回転機11Aは、第1実施形態の回転機11と異なり、後述する取付部12fの径方向(以下、単に「径方向」という)の内側から、ステータ13、第2ロータ15および第1ロータ14の順に配置されている。同図において、補機駆動装置1Aの構成要素のうち、第1実施形態と同じものについては、同じ符号を用いて示している。このことは、後述する他の実施形態の図面についても同様である。以下、第1実施形態と異なる点を中心として説明する。
ステータ13の鉄芯13aは、円柱状の取付部12fの外周面に取り付けられており、この取付部12fは、連結部12gを介して、エンジン3に固定されている。これにより、鉄芯13aを含むステータ13は、移動不能になっている。また、スロットは、鉄芯13aの外周面に形成されている。
さらに、第1ロータ14の永久磁石14aは、リング状の取付部14dの内周面に取り付けられており、この取付部14dの外周面は、リング状の出力プーリ22Aの内周面に一体に取り付けられている。この出力プーリ22Aには、ベルト23が巻き掛けられている。さらに、上記の取付部14dは、円筒状の第1連結部16aの一端部に一体に取り付けられており、この第1連結部16aの他端部は、ドーナツ板状の第2連結部16bを介して、中空の回転軸16cに取り付けられている。この回転軸16cは、軸受け17に回転自在に支持されており、その内側には、クランク軸3aが同心状に回転自在に嵌合している。以上により、永久磁石14aを含む第1ロータ14は、出力プーリ22Aと一体に回転自在になっており、出力プーリ22A、ベルト23、および入力プーリ21を介して、コンプレッサ4に連結されている。なお、鉄芯13aのスロット、永久磁石14a、および第2ロータ15のコア15aは、取付部12fの周方向に等間隔に並んでおり、これらの数は、第1実施形態と同じに設定されている。
以上の構成の補機駆動装置1Aでは、ENG停止モードおよびENG運転モードによる動作が、第1実施形態と同様に行われる。この場合、回転機11Aの制御は、図32を用いて説明したように行われる。以上により、この第2実施形態によれば、第1実施形態による前述した効果を同様に得ることができる。また、第1実施形態では、出力プーリ22が回転機11などと別個に設けられているのに対し、第2実施形態では、出力プーリ22Aの内側に第1ロータ14、第2ロータ15およびステータ13が設けられているので、補機駆動装置1Aをさらに小型化することができる。
次に、図20を参照しながら、本発明の第3実施形態による補機駆動装置1Bについて説明する。同図に示すように、この補機駆動装置1Bは、第1実施形態と比較して、回転機11がプーリやベルトを用いずに補機としてのオイルポンプ5に直結されている点が、主に異なっている。具体的には、第1ロータ14の取付部14bは、ドーナツ板状の連結部14eを介して、オイルポンプ5の入力軸5aに直結されている。この入力軸5aは、中空に形成されるとともに、軸受け12dに回転自在に支持されており、その内側には、クランク軸3aが同心状に回転自在に嵌合している。
また、以上の構成の補機駆動装置1Bでは、ENG停止モードおよびENG運転モードによる動作が、第1実施形態と同様に行われる。この場合、回転機11の制御は、図32を用いて説明したように行われる。ただし、前述した目標d軸およびq軸の電流Id_tar,Iq_tarは、例えば、第1ロータ14に作用するオイルポンプ5の負荷などに応じて算出される。以上により、この第3実施形態によれば、第1実施形態による効果を同様に得ることができる。また、第3実施形態では、第1実施形態と比較して、入力プーリ21、出力プーリ22およびベルト23が省略されている分、補機駆動装置1Bの小型化およびコストの削減を、より一層、図ることができる。
なお、第1〜第3の実施形態では、前述した極対数比αを値2.0に設定しているが、極対数比αを値1.0未満に設定した場合には、次のような効果が得られる。図21に実線で示す速度共線図は、この場合における各種のパラメータの回転速度の関係を、エンジン3の運転中で、かつ、コンプレッサ4(オイルポンプ5)の駆動中について示している。また、前述したように、従来の補機駆動装置では、第1および第2の回転磁界の回転数と第2ロータの回転数との差と、第2ロータの回転数と第1ロータの回転数との差が同じになるため、第1および第2の回転磁界の回転数は、図21に破線で表記した速度共線図のように示される。なお、同図では、コンプレッサ4およびオイルポンプ5のうち、両者を代表して、コンプレッサ4を表記している。
図21に破線で示すように、エンジン回転数NEが比較的高いことによって、第2ロータの回転数が第1ロータよりも高いときには、第1および第2の回転磁界の回転数は、第2ロータよりも高くなり、過大になる。これに対して、上述したように極対数比αを値1.0未満に設定することによって、図21に破線で示す速度共線図と、実線で示す速度共線図との比較から明らかなように、前述した従来の場合よりも、回転磁界の回転数を低減できるので、回転磁界の回転数の過大化による損失の発生によりコンプレッサ4(オイルポンプ5)の駆動効率が低下するのを、防止することができる。
図22は、本発明の第4実施形態による補機駆動装置1Cを示している。以下、この補機駆動装置1Cについて、第1実施形態と異なる点を中心に説明する。図22に示すように、補機駆動装置1Cは、第1実施形態と比較して、クランク軸3aおよびコンプレッサ4に対する第1および第2のロータ14,15の連結関係が逆になっている点が、主に異なっている。具体的には、第1ロータ14はクランク軸3aに直結されており、第2ロータ15は、回転軸16、出力プーリ22、ベルト23および入力プーリ21を介して、コンプレッサ4の入力軸4aに連結されている。また、回転角センサ32は、第1実施形態と異なり、第1ロータ回転角θR1ではなく、第2ロータ回転角θR2を検出し、その検出信号をECU25に出力する。
さらに、ECU25は、第1ロータ14がクランク軸3aに直結されていることから、クランク角センサ31で検出されたクランク角度位置に基づいて、第1ロータ回転角θR1を算出するとともに、第2ロータ15がコンプレッサ4の入力軸4aに連結されていることから、検出された第2ロータ回転角θR2に基づいて、コンプレッサ回転数NAを算出する。また、ECU25は、第1および第2のロータ回転角θR1,θR2とコンプレッサ回転数NAに応じて、回転機11の動作を制御する。さらに、上述したような第1実施形態との構成上の違いから、補機駆動装置1CにおけるENG停止モードおよびENG運転モードは、第1実施形態の場合と異なっている。以下、これらの動作モードについて、ENG停止モードから順に説明する。
・ENG停止モード
図23は、このENG停止モード中における各種の回転要素の回転数の関係の一例を、各種の回転要素のトルクの関係の一例とともに示している。上述したように第1ロータ14がクランク軸3aに直結されているので、第1ロータ14の回転数とエンジン回転数NEは、互いに等しい。また、第2ロータ15が、回転軸16、出力プーリ22、ベルト23および入力プーリ21を介して、コンプレッサ4の入力軸4aに連結されているので、両プーリ22,21による変速を無視すれば、第2ロータ15の回転数とコンプレッサ回転数NAは、互いに等しい。これらのことと、前述した回転機11の機能から、ENG停止モード中における回転磁界、第1および第2のロータ14,15の間の回転数の関係と、エンジン回転数NEとコンプレッサ回転数NAの関係は、例えば図23のように示される。
ENG停止モード中、第1ロータ14には、エンジンフリクションTEFが作用しており、このエンジンフリクションTEFは、コンプレッサ4を駆動するのに必要なトルクよりも非常に大きい。そのような状態で、ECU25によるPDU26の制御によって、ステータ13に電力を供給し、回転磁界を正転させる。これにより、図23に示すように、ステータ13への電力供給に伴って発生した駆動用等価トルクTSEは、第1ロータ14に作用するエンジンフリクションTEFを反力として、第2ロータ15に伝達され、第2ロータ15を正転させるように作用する。また、第2ロータ15に伝達された第2ロータ伝達トルクTR2は、回転軸16などを介して、コンプレッサ4に伝達され、その結果、コンプレッサ4の入力軸4aが正転する。この場合、エンジン回転数NEが値0になり、ステータ13に供給された電力はすべて、動力としてコンプレッサ4に伝達される。
さらに、図23に示すように、ENG停止モード中、前記式(40)、第1および第2のロータ回転角θR1,θR2に応じ、回転磁界の回転数を制御することによって、コンプレッサ回転数NAが、コンプレッサ4の作動に適した所定値NREFに保持される。以上のように、ENG停止モード中、第1実施形態と同様、コンプレッサ4は、回転機11のみを駆動源として駆動される。
・ENG運転モード
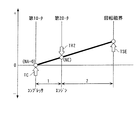
このENG運転モードの開始時、クランク軸3aから第1ロータ14に伝達される動力の一部を用いて、ステータ13で発電を行う。図24(a)は、ENG運転モードの開始時における各種の回転要素の回転数の関係を、各種の回転要素のトルクの関係とともに示している。同図に示すように、ENG運転モードの開始時、第1ロータ14がクランク軸3aとともに正転するのに対し、第2ロータ15が停止しているので、第1および第2のロータ14,15の回転数によって定まる回転磁界の回転方向は、逆転方向になる。
このため、エンジン3から第1ロータ14に伝達された第1ロータ伝達トルクTR1は、発電用等価トルクTGEを反力として、第2ロータ15に伝達され、さらに、コンプレッサ4に伝達され、コンプレッサ4が駆動される(図24参照)。換言すれば、第1ロータ14に伝達されたエンジン3の動力の一部が、ステータ13に電力として分配されるとともに、残りが、第2ロータ15を介してコンプレッサ4に分配される。また、逆転している回転磁界の回転数を値0になるように制御することにより、ステータ13に電力として分配されるエンジン3の動力を低下させることによって、第2ロータ15を介してコンプレッサ4に分配されるエンジン3の動力を増大させる。以上の結果、図24(b)に示すように、コンプレッサ回転数NAが、図24(a)に示す値0の状態から上昇する。
そして、ENG運転モード中、回転磁界の回転数が値0になった後には、ステータ13に電力を供給するとともに、回転磁界を正転させる。これにより、図25に示すように、エンジン3から第1ロータ14に伝達された第1ロータ伝達トルクTR1は、駆動用等価トルクTSEを反力として、第2ロータ15に伝達され、さらに、コンプレッサ4に伝達される。換言すれば、エンジン3から第1ロータ14に伝達された動力と、ステータ13に供給された電力に相当する動力とが合成された後、第2ロータ15を介してコンプレッサ4に伝達される。
さらに、図25に示すように、ENG運転モード中、ENG停止モードと同様、前記式(40)、第1および第2のロータ回転角θR1,θR2に応じ、回転磁界の回転数を制御することによって、コンプレッサ回転数NAが、コンプレッサ4の作動に適した所定値NREFに保持される。この場合、図25に実線で示す速度共線図と破線で示す速度共線図から明らかなように、エンジン回転数NEの高低にかかわらず、コンプレッサ回転数NAを、コンプレッサ4の作動に適した所定値NREFに保持することができる。
また、図26に示すように、ENG運転モード中、エンジン回転数NEが非常に高い場合には、同図に破線で示すように、正転する回転磁界の回転数を制御しても、コンプレッサ回転数NAを所定値NREFに制御できない場合がある。そのような場合には、ステータ13で発電を行い、回転磁界を逆転させるとともに、回転磁界の回転数を制御することによって、図26に実線で示すように、コンプレッサ回転数NAを、所定値NREFに保持することができる。以上のように、エンジン3の極高回転中には、ステータ13で発電しながら、コンプレッサ4を駆動することができる。また、発電した電力は、バッテリ27に充電され、それにより、次回のENG停止モード中に、バッテリ27に充電した電力を用いて、コンプレッサ4を駆動することができる。
また、エンジン3の運転中、コンプレッサ4を停止するときには、コンプレッサ回転数NAが値0、すなわち、第2ロータ15の回転数が値0になればよいので、前記式(40)から明らかなように、回転磁界を、エンジン回転数NEの2倍の速度で逆転するように制御する。また、発電用等価トルクTGEを、第2ロータ15に作用するコンプレッサ4のフリクションのトルク相当値の1/3になるように制御する。以上により、第2ロータ15の回転数が値0に制御され、コンプレッサ4が停止されるとともに、回転機11に入力されたエンジン3の動力のほぼ100%が、電力に変換される。
また、以上のENG停止モードおよびENG運転モード中、ECU25による回転機11の制御は、図32を用いて説明したように行われ、それにより、回転磁界の磁界電気角度位置θMFRが、前記式(39)が成立するように制御される。ただし、この場合、目標d軸およびq軸の電流Id_tar,Iq_tarは、例えば、第2ロータ15に作用するコンプレッサ4の負荷などに応じて算出される。
以上のように、上述した第4実施形態によれば、回転機11において、極対数比αが値2.0に設定されている。これにより、前記式(41)から明らかなように、コンプレッサ4を駆動するためには、駆動用等価トルクTSEおよび発電用等価トルクTGEを、第2ロータ15を介してコンプレッサ4に伝達されるトルクの1/3の大きさに制御すれば足りる。一方、前述した従来の補機駆動装置を用いてコンプレッサ4を駆動するためには、駆動用等価トルク(発電用等価トルク)と、第1ロータに伝達されるトルクと、第2ロータに伝達されるトルクとの比が1:1:2であるので、駆動用等価トルク(発電用等価トルク)を、第2ロータを介してコンプレッサ4に伝達されるトルクの1/2の大きさに制御しなければならない。以上のように、従来の場合と比較して、駆動用等価トルクTSEおよび発電用等価トルクTGEを低減できるので、ステータ13の小型化を図ることができ、ひいては、補機駆動装置1Cの小型化およびコストの削減を図ることができる。
また、第1実施形態と同様、従来の場合と異なり、コア15aから成る単一の軟磁性体列によって回転機11を作動させ、コンプレッサ4を駆動することができるので、回転機11の構成を単純化でき、ひいては、補機駆動装置1Cの構成の単純化と、さらなるコストの削減を図ることができる。さらに、第1および第2のロータ電気角θER1,θER2を算出するとともに、算出された両電気角θER1,θER2に応じ、回転磁界の磁界電気角度位置θMFRを、前記式(39)が成立するように制御するので、回転機11の適正な動作を確保でき、ひいては、補機駆動装置1Cの適正な動作を確保することができる。
なお、補機駆動装置1および1A〜1Cは、コンプレッサ4などの補機の駆動用だけでなく、エンジン3の始動用のスタータとして兼用することができる。図27は、そのように構成された補機駆動装置1Dなどを示している。この補機駆動装置1Dは、前述した第2実施形態の回転機11Aを有している。同図に示すように、第1ロータ14は、第1および第2の連結部16a,16b、ワンウェイクラッチ41、および連結部12gを介して、エンジン3の本体に連結されている。このワンウェイクラッチ41は、第1ロータ14に正転させるような動力が伝達された場合には、第1ロータ14とエンジン3の本体との間を遮断し、それにより、第1ロータ14の回転を許容する一方、第1ロータ14に逆転させるような動力が伝達された場合には、第1ロータ14とエンジン3の本体との間を接続し、それにより、第1ロータ14の回転を阻止する。
図28は、補機駆動装置1Dにおいて、エンジン3を始動する際の各種の回転要素の回転数の関係を、各種の回転要素のトルクの関係とともに示している。エンジン3の始動時、ステータ13に電力を供給するとともに、回転磁界を正転させる。これにより、駆動用等価トルクTSEは、エンジン3の本体からワンウェイクラッチ41を介して第1ロータ14に作用する反力TCにより、第2ロータ15に伝達され、さらに、クランク軸3aに伝達される結果、クランク軸3aが正転する。その状態で、エンジン3の燃料噴射弁や点火プラグ(図示せず)の点火動作を制御することによって、エンジン3を始動することができる。
この場合、図28に示すトルクの関係から明らかなように、エンジン3を始動すべく、クランク軸3aを回転させるためには、駆動用等価トルクTSEを、第2ロータ15を介してクランク軸3aに伝達されるトルクの1/3の大きさに制御すれば足りる。一方、従来の補機駆動装置を用いてクランク軸3aを駆動する場合には、駆動用等価トルク(発電用等価トルク)と、第1ロータに伝達されるトルクと、第2ロータに伝達されるトルクとの比が1:1:2であるので、駆動用等価トルクを、第2ロータを介してクランク軸3aに伝達されるトルクの1/2の大きさに制御しなければならない。以上のように、従来の場合と比較して、駆動用等価トルクTSEを低減できるので、ステータ13の小型化を図ることができ、ひいては、補機駆動装置1Dの小型化およびコストの削減を図ることができる。
なお、以上のようなエンジン3の始動中、ECU25による回転機11Aの制御は、図32を用いて説明したように行われ、それにより、回転磁界の電気角度位置θMFRが、前記式(39)が成立するように制御される。ただし、この場合、目標d軸およびq軸の電流Id_tar,Iq_tarは、例えば、第2ロータ15に作用するエンジンフリクションTEFなどに応じて算出される。
また、上述した補機駆動装置1Dのように、第1および第2のロータ14,15が補機(コンプレッサ4)およびクランク軸3aにそれぞれ連結されている場合に限らず、これとは逆に、第4実施形態の補機駆動装置1Cのように、第1および第2のロータ14,15がクランク軸3aおよび補機にそれぞれ連結されている場合にも、エンジン3を始動することができる。この場合、回転軸16を第2ロータ15とともにクラッチなどにより回転不能に保持した状態で、ステータ13に電力を供給するとともに、回転磁界を逆転させる。これにより、図29に示すように、駆動用等価トルクTSEは、クラッチから第2ロータ15に作用する反力TCによって、第1ロータ14に伝達され、さらに、クランク軸3aに伝達される結果、クランク軸3aが正転する。その状態で、エンジン3の燃料噴射弁や点火プラグの点火動作を制御することによって、エンジン3を始動することができる。
この場合、図29に示すトルクの関係から明らかなように、エンジン3を始動すべく、クランク軸3aを回転させるためには、駆動用等価トルクTSEを、第1ロータ14を介してクランク軸3aに伝達されるトルクの1/2の大きさに制御すれば足りる。一方、前述した従来の補機駆動装置を用いてクランク軸3aを駆動する場合には、駆動用等価トルク(発電用等価トルク)と、第1ロータに伝達されるトルクと、第2ロータに伝達されるトルクとの比が1:1:2であるので、駆動用等価トルクを、第1ロータを介してクランク軸3aに伝達されるトルクと同じ大きさに制御しなければならない。以上のように、補機駆動装置1Cをエンジン3の始動用として兼用する場合にも、従来の場合と比較して、駆動用等価トルクTSEを低減できるので、ステータ13の小型化を図ることができ、ひいては、補機駆動装置1Cの小型化およびコストの削減を図ることができる。
なお、以上のようなエンジン3の始動中、ECU25による回転機11の制御は、図32を用いて説明したように行われ、それにより、回転磁界の電気角度位置θMFRが、前記式(39)が成立するように制御される。ただし、この場合、目標d軸およびq軸の電流Id_tar,Iq_tarは、例えば、第1ロータ14に作用するエンジンフリクションTEFなどに応じて算出される。
なお、本発明は、説明した実施形態に限定されることなく、種々の態様で実施することができる。例えば、本実施形態は、補機がコンプレッサ4やオイルポンプ5の例であるが、本発明は、これらに限らず、他の様々な補機に適用できることはもちろんである。例えば、車両用の燃料ポンプや過給コンプレッサ、または船舶用や航空機用などの補機に適用することができる。また、実施形態は、電機子磁極が4個、磁石磁極が8個、コア15aが6個であり、すなわち、本発明における電機子磁極の数と磁極の数と軟磁性体の数との比が、1:2:1.5の例であるが、これらの数の比が1:m:(1+m)/2(m≠1.0)を満たすものであれば、電機子磁極、磁石磁極およびコア15aの数として、任意の数を採用可能である。さらに、実施形態では、コア15aを鋼板で構成しているが、他の軟磁性体で構成してもよい。また、実施形態では、ステータ13、第1および第2のロータ14,15を径方向に並ぶように配置し、いわゆるラジアルタイプとして回転機11、11Aを構成しているが、ステータ13、第1および第2のロータ14,15を軸線方向に並ぶように配置し、いわゆるアキシャルタイプとして回転機11、11Aを構成してもよい。
さらに、実施形態では、1つの磁極を、単一の永久磁石14aの磁極で構成しているが、複数の永久磁石の磁極で構成してもよい。例えば、2つの永久磁石の磁極がステータ13側で近づき合うように、これらの2つの永久磁石を逆V字状に並べることにより、1つの磁極を構成することによって、前述した磁力線MLの指向性を高めることができる。また、実施形態における永久磁石14aに代えて、電磁石や回転磁界を発生可能な電機子を用いてもよい。さらに、実施形態では、U相〜W相のコイル13c〜13eをスロット13bに分布巻きで巻回しているが、これに限らず、集中巻きでもよい。また、実施形態では、コイル13c〜13eを、U相〜W相の3相コイルで構成しているが、回転磁界を発生できれば、このコイルの相数はこれに限らず、任意である。さらに、スロット13bの数として、実施形態で示した以外の任意の数を採用してもよいことはもちろんである。また、実施形態では、スロット13bや、永久磁石14a、コア15aを等間隔に配置しているが、不等間隔に配置してもよい。
さらに、実施形態では、第1および第2のロータ回転角θR1,θR2として、基準コイルすなわち特定のU相コイル13cに対する特定の永久磁石14aおよびコア15aの回転角度位置をそれぞれ検出しているが、ステータ13に対する第1および第2のロータ14,15の回転角度位置を表すのであれば、他の部位の回転角度位置を検出してもよい。例えば、特定のV相コイル13dや、特定のW相コイル13e、ケース12の特定の部位に対する、取付部14b、14dやフランジ14cなどの特定の部位の回転角度位置を第1ロータ回転角θR1として、フランジ15bや連結部15cの特定の部位の回転角度位置を第2ロータ回転角θR2として、それぞれ検出してもよい。
また、実施形態では、回転角センサ32は、電磁誘導式のものであるが、光学式のものでもよい。さらに、第1〜第3の実施形態では、第2ロータ回転角θR2を、第4実施形態では第1ロータ回転角θR1を、検出されたクランク角度位置に基づいて算出しているが、第1および第2のロータ回転角θR1,θR2をセンサなどで直接、検出してもよい。この場合、そのセンサとして、電磁誘導式や、光学式などといった任意のタイプのものを用いてもよいことは、もちろんである。また、実施形態では、回転磁界の制御に用いる磁界電気角度位置θMFRを、クランク角センサ31および回転角センサ32で検出(算出)された第1および第2のロータ回転角θR1,θR2を用い、式(39)によって算出しているが、特願2007−280916号に記載された手法によって求めてもよい。具体的には、サンギヤとリングギヤの歯数の比が電機子磁極および磁石磁極の一方の数に対する他方の数の比と同じ値である遊星歯車装置と、単一の回転角センサを用意し、サンギヤおよびリングギヤの一方を第1ロータ14に、キャリアを第2ロータ15に、それぞれ連結するとともに、特定のU相コイル13cに対するサンギヤおよびリングギヤの他方の回転角度位置を、回転角センサで検出する。この場合、電機子磁極の数が磁石磁極の数よりも大きい場合、第1ロータ14には、サンギヤが連結される。
以上により、上記の回転角センサで検出される回転角度位置は、電機子磁極の数に対する磁石磁極の数の比をγとすると、(1+γ)θR2−γ・θR1を表す。このことから明らかなように、第1および第2のロータ14,15の回転角度位置を2つのセンサで別個に検出することなく、遊星歯車装置と単一の回転角センサによって、回転磁界の制御に用いる磁界電気角度位置θMFRを求めることができる。
さらに、実施形態では、回転機11、11Aの動作を制御する制御装置として、ECU25およびPDU26を用いているが、これに限らず、例えば、マイクロコンピュータを搭載した電気回路などを用いてもよい。また、コンプレッサ回転数NAを、第1〜第3の実施形態では第1ロータ回転角θR1に基づいて、第4実施形態では第2ロータ回転角θR2に基づいて、それぞれ算出しているが、コンプレッサ回転数NAをセンサなどで直接、検出してもよい。この場合のセンサとして、電磁誘導式や光学式など、任意のタイプのものを用いることができる。
さらに、実施形態では、本発明における原動機は、車両用のガソリンエンジンであるが、動力を出力するための出力軸を有する任意の原動機でもよい。例えば、ディーゼルエンジンや、クランク軸が鉛直方向に配置された船外機などのような船舶推進機用エンジンを含む様々な産業用の内燃機関を用いてもよく、あるいは、外燃機関や、電動機、水車、風車などを用いてもよい。その他、本発明の趣旨の範囲内で、細部の構成を適宜、変更することが可能である。