以下、本発明の実施の形態について図面を参照して説明する。
図1は、本発明の実施形態である撮像装置1の具体的な回路構成を示している。
この撮像装置1は、撮像光学系111により被写体を撮像して、画像データを取得するものである。撮像装置1は、当該撮像装置1の全体の動作を統括する制御回路101を有している。
撮像装置1は、撮像光学系111を制御して画像データを取得するための構成を有する。この構成は、絞り駆動回路112、映像信号処理回路113、撮像処理回路114、イメージセンサ115、タイミング発生回路116a及びドライバ116b、ズームレンズ駆動回路117、フォーカスレンズ駆動回路118、手振れ補正駆動回路119からなる。
撮像光学系111は、光軸上にフォーカスレンズ111a、ズームレンズ111b、補正レンズ111cを含んだレンズ群が配置されて構成されている。フォーカスレンズ111aは、フォーカスレンズ駆動回路118によって制御される駆動モータ118aによって光軸上における前後に駆動される。ズームレンズ111bは、ズームレンズ駆動回路117によって制御される駆動モータ117aによって光軸上における前後に駆動される。補正レンズ111cは、後述するように撮像装置1の手振れに応じて駆動される。この補正レンズ111cは、手振れ補正駆動回路119の光学的ブレ補正制御によって高分子アクチュエータが駆動され、手振れに応じて移動される。また、この撮像光学系111においては、絞り駆動回路112によって制御される駆動モータ112aによって、絞り機構111dの制御が行われる。なお、図1には示してはいないが、撮像光学系111を通過した光がイメージセンサ115に導くことを制御するシャッタ機構が設けられていても良い。
撮像光学系111は、受光した光をイメージセンサ115に導く。イメージセンサ115は、撮像光学系111における後方光軸上に配置されている。イメージセンサ115は、CCD(Charge Coupled Device)やCMOS(Complementary Metal-Oxide Semiconductor)などのイメージセンサなどで構成されており、入射光によって発生した電荷を撮像信号として撮像処理回路114に出力する。このイメージセンサ115の動作は、タイミング発生回路116a及びドライバ116bによって制御される。このとき、制御回路101の制御に従ってタイミング発生回路116aがイメージセンサ115の動作周期を示すタイミングを発生させ、ドライバ116bによって当該タイミングに従ってイメージセンサ115を動作させる。
撮像処理回路114は、イメージセンサ115から出力された撮像信号に対して、CDS回路(相関二重サンプル回路)によるノイズ除去及びサンプル・ホールド処理され、AGC(自動利得制御)アンプで増幅され、その後に、ADC(A/D変換器)によってディジタル方式の撮像画像データに変換する。そして、この撮像画像データは、映像信号処理回路113に供給される。
映像信号処理回路113は、撮像処理回路114から出力された撮像画像データに対して所定の映像処理を施す。具体的には、映像信号処理回路113は、撮像画像データに対し、シェーディング補正や黒レベル補正処理、欠陥画素補正処理などを行った後、ディジタルAGC処理によって振幅増幅すると共に、ホワイトバランス調整やカラーバランス調整を行う。その後に、映像信号処理回路113は、イメージセンサ115の前面に設けられたモザイク状の「Bayer配列」や千鳥配列されたRGBカラーフィルタ配列に従って、画素毎には一つの色成分しか持たないBayerデータ(RAWデータ)から、他の色差成分の画素値も、近隣周辺の画素値等から画素補間(Pixel Signal lnterpolation)して求めて(カラー補間処理)、画素毎に色差成分毎の階調値を持つディジタルの撮像画像データに変換する。そして、この撮像画像データは、制御回路101に出力される。
撮像装置1は、ユーザの操作を検出する構成を備える。この構成は、入力回路121、シャッター機構122、ダイアル機構123、キー機構124、その他の操作入力部125、タッチパネル126からなる。シャッター機構122は、ユーザが撮影を行うときに操作され、その押圧深さによって半押しスイッチ及び全押しスイッチを動作させる。これにより入力回路121は、シャッター機構122がユーザに操作されたことを検知して、操作信号を制御回路101に出力する。また、入力回路121は、手振れのオンオフ設定などの撮像条件や、画像再生時においてダイアル機構123、キー機構124、操作入力部125、タッチパネル126が操作された操作信号を制御回路101に出力する。
撮像装置1は、当該撮像装置1の手振れを検出する構成を備える。この構成は、手振れ検出回路141、ヨー方向角速度センサ142及びピッチ方向角速度センサ143からなる。撮像装置1は、手振れ補正機能をオンとされている場合には、駆動回路141aによってヨー方向角速度センサ142およびピッチ方向角速度センサ143を動作させる。そして、手振れ検出回路141は、ヨー方向角速度センサ142、ピッチ方向角速度センサ143から供給される信号に対して、フィルタ処理、アンプ処理及びA/D変換処理を施して、手振れ検出信号を生成して制御回路101に供給する。この手振れ検出信号に応じて、後述するように、高分子アクチュエータを駆動して補正レンズ111cを動作させることとなる。
撮像装置1は、ユーザにライブビュー画像(スルー画像)等を提示する構成を備える。この構成は、表示メモリ131、表示駆動回路132、表示モニタ133からなる。撮像装置1は、通常の撮像モード時において、制御回路101から、リアルタイムの撮像画像データが供給される。この撮像画像データは、表示モニタ133に表示するために表示メモリ131に一旦格納される。そして、この撮像画像データは、表示駆動回路132に出力され、表示駆動回路132が表示モニタ133を駆動することによって表示処理される。これにより、撮像装置1は、撮像光学系111で撮像している現在のライブビュー画像を表示モニタ133に提示してユーザに提示することができる。
撮像装置1は、撮像画像データの画像処理のための構成として、画像信号処理回路161、画像・音声符号/復号器162、画像データメモリ163、その他のデータを一時的に記憶しておくデータメモリ164を備える。画像信号処理回路161は、制御回路101から供給された撮像画像データに対して所定の画像信号処理を施す。画像・音声符号/復号器162は、制御回路101から供給された撮像画像データに対してJPEG方式による符号化及び復号処理を施すと共に図示しないマイクにより取得した音声信号に対して所定の符号化及び復号処理を施す。画像データメモリ163は、制御回路101から供給された撮像画像データを一時的に格納する。データメモリ164は、画像を除く音声データやその他の設定情報、テーブル情報などを記憶しておく。
撮像装置1は、画像等を記録する構成として、メモリカードインタフェース191及びメモリカード部192を備える。メモリカードインタフェース191は、制御回路101から撮像画像データを保存する命令が供給された場合に、撮像画像データを取得してメモリカード部192にて装着されているメモリカードに撮像画像データを書き込む。また、制御回路101からメモリカードに記録された撮像画像データを読み出す命令が供給された場合に撮像画像データを読み出して出力する。
撮像装置1は、当該撮像装置1が作動するために、電源回路181、電源スイッチ182及び電池部183を備える。電源回路181は、電源スイッチ182の押下操作を検出し、撮像装置1の電源のオン及びオフを行う。電池部183は、電池が装着され、電源回路181の制御に従って撮像装置1の各部に電力を供給する。
撮像装置1は、フラッシュを閃光させる構成として、フラッシュ駆動回路151及びフラッシュ機構152を備えている。フラッシュ駆動回路151は、電池部183の電力を、電源回路181を介して取得し、フラッシュ機構152を駆動する。フラッシュ駆動回路151は、フラッシュ動作モードに応じた制御回路101からの制御信号に従って、フラッシュ機構152のオンオフ制御や、光量調整を行って、フラッシュ機構152を動作させる。
撮像装置1は、外部接続のための構成として、外部I/Oインタフェース回路171、接続機構172を備える。接続機構172には、USB(Universal Serial Bus)ケーブルやIEEE(The Institute of Electrical and Electronics Engineers)1394ケーブルなどの所定の規格に準拠した通信線が接続される。外部I/Oインタフェース回路171は接続機構172に接続された通信線を介して、外部機器との間で通信を行う。これにより撮像装置1は、メモリカード部192に記憶している撮像画像データを外部に出力する動作などを行う。
以上説明したような撮像装置1は、以下に説明するように手振れ検出回路141によって検出された手振れ検出信号に基づいて、手振れ補正駆動回路119によって補正レンズ111cを動作させる。
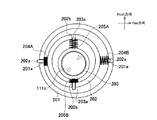
補正レンズ111cを動作させるための手振れ補正機構200は、図2に示すように構成されている。この手振れ補正機構200は、撮像光学系111に固定された固定枠201と、補正レンズ111cをヨー(Yaw)方向に移動させるヨー方向シフト枠202と、補正レンズ111cをピッチ(Pitch)方向に移動させるピッチ方向シフト枠203とを備える。固定枠201、ヨー方向シフト枠202及びピッチ方向シフト枠203は、共に円還状に形成されている。ヨー方向シフト枠202は、補正レンズ111cをピッチ方向に移動させる最大移動量に相当する距離だけピッチ方向シフト枠203よりも大きい径で構成されている。固定枠201は、補正レンズ111cをヨー方向に移動させる最大移動量に相当する距離だけヨー方向シフト枠202よりも大きい径で構成されている。なお、この図2の手振れ補正機構200は、ピッチ方向シフト枠203に補正レンズ111cを嵌め込んでいるが、この補正レンズ111cを嵌め込んだシフト枠を左右方向に移動させる構成であっても良いことは勿論である。
固定枠201とヨー方向シフト枠202との間には、第1ヨー方向高分子ACT(アクチュエータ)204A及び第2ヨー方向高分子ACT204Bとが設けられている。これら第1ヨー方向高分子ACT204Aと第2ヨー方向高分子ACT204Bとは、手振れ補正機構200の径方向において対向して設けられている。また、ヨー方向シフト枠202とピッチ方向シフト枠203との間には、第1ピッチ方向高分子ACT205A及び第2ピッチ方向高分子ACT205Bとが設けられている。これら第1ピッチ方向高分子ACT205Aと第2ピッチ方向高分子ACT205Bとは、第1ヨー方向高分子ACT204A及び第2ヨー方向高分子ACT204Bとは直交した、手振れ補正機構200の径方向において対向して設けられている。
第1ヨー方向高分子ACT204A及び第2ヨー方向高分子ACT204Bは、スプリング形状となっており、ヨー方向シフト枠202に形成されたヨー方向ガイドピン202aに挿通されている。このヨー方向ガイドピン202aは、ヨー方向シフト枠202の直径方向において対向した位置に設けられている。ヨー方向ガイドピン202aは、固定枠201に形成されたヨー方向ガイド溝201aに挿入されている。このような構成により、ヨー方向シフト枠202は、第1ヨー方向高分子ACT204A及び第2ヨー方向高分子ACT204Bの伸縮動作に応じて、ヨー方向ガイドピン202aがヨー方向ガイド溝201aに対してスライドするように移動する。
第1ピッチ方向高分子ACT205A及び第2ピッチ方向高分子ACT205Bは、スプリング形状となっており、ピッチ方向シフト枠203に形成されたピッチ方向ガイドピン203aに挿通されている。このピッチ方向ガイドピン203aは、ヨー方向ガイドピン202aとは直交した位置であって、ピッチ方向シフト枠203の直径方向において対向した位置に設けられている。ピッチ方向ガイドピン203aは、ヨー方向シフト枠202に形成されたピッチ方向ガイド溝202bに挿入されている。このような構成により、ピッチ方向シフト枠203は、第1ピッチ方向高分子ACT205A及び第2ピッチ方向高分子ACT205Bの伸縮動作に応じて、ピッチ方向ガイドピン203aがピッチ方向ガイド溝202bに対してスライドするように移動する。
第1ヨー方向高分子ACT204A、第2ヨー方向高分子ACT204B、第1ピッチ方向高分子ACT205A、第2ピッチ方向高分子ACT205Bは、電圧の印加方向に応じて伸長又は収縮し、電圧値に応じて伸長量及び収縮量が調整される高分子材料で構成されている。この高分子材料としては、導電性高分子アクチュエータ、イオン伝導性高分子アクチュエータに用いられている既知の材料が使用可能である。
具体的には、導電性高分子アクチュエータを構成する導電性高分子としては、電気化学的重合(電解重合)法によって作られるポリピロール、ポリアニリン、ポリチオフェンや、化学的重合(触媒重合)法によって作られるポリアセチレン等である。また、イオン伝導性高分子アクチュエータを構成するイオン伝導性高分子としては、フッ素樹脂系イオン交換膜などが挙げられる。
各第1ヨー方向高分子ACT204A、第2ヨー方向高分子ACT204B、第1ピッチ方向高分子ACT205A、第2ピッチ方向高分子ACT205Bには、電圧印加用のアクチュエータ端子が接続されている。第1ヨー方向高分子ACT204Aにはヨー方向に補正レンズ111cを移動させるための第1アクチュエータ端子が接続され、第1ピッチ方向高分子ACT205Aには同じくヨー方向に補正レンズ111cを移動させるための第2アクチュエータ端子が接続されている。第2ヨー方向高分子ACT204Bにはピッチ方向に補正レンズ111cを移動させるための第1アクチュエータ端子が接続され、第2ピッチ方向高分子ACT205Bには同じくヨー方向に補正レンズ111cを移動させるための第2アクチュエータ端子が接続されている。
そして、この撮像装置1においては、手振れ補正駆動回路119によって各アクチュエータ端子に電圧が印加される。ここで、手振れ補正駆動回路119は、手振れ検出回路141によって検出された手振れ検出信号によって示されるヨー角成分の手振れ量及びピッチ角成分の手振れ量に基づいて、当該ヨー角成分の手振れ量及びピッチ角成分の手振れ量を打ち消すようにヨー角成分、ピッチ角成分それぞれの補正レンズ111cの移動量を決定する。各アクチュエータに印加される電圧は、手振れ補正駆動回路119が決定した補正レンズ111cの移動量によって決定される。これにより、第1ヨー方向高分子ACT204Aと第2ヨー方向高分子ACT204Bとが同期して動作して補正レンズ111cをヨー方向に移動させ、第1ピッチ方向高分子ACT205Aと第2ピッチ方向高分子ACT205Bとが同期して動作して補正レンズ111cをピッチ方向に移動させる。
この結果、手振れ補正機構200は、図3に示すように、撮像装置1の手振れが検出された場合には、第1ヨー方向高分子ACT204Aを収縮させると共に第2ヨー方向高分子ACT204Bを伸長し、第2ピッチ方向高分子ACT205Bを収縮すると共に第1ピッチ方向高分子ACT205Aを伸長するように、各アクチュエータを動作させることができる。このように、この手振れ補正機構200によれば、各高分子アクチュエータに対して独立に電圧を印加することにより、補正レンズ111cをヨー方向、ピッチ方向に独立して移動させることができる。
また、この手振れ補正機構200は、図4に示すように手振れ検出回路141により検出された手振れ検出信号に応じて対向する第1ヨー方向高分子ACT204Aと第2ヨー方向高分子ACT204B、第1ピッチ方向高分子ACT205Aと第2ピッチ方向高分子ACT205Bのように、一方のアクチュエータを収縮させた時には他方のアクチュエータを伸長する動作をすることができる。
この他に、この手振れ補正機構200は、ヨー方向高分子アクチュエータの一方及びピッチ方向高分子アクチュエータの一方を金属からなるスプリングに変更したものであっても良い。この手振れ補正機構200は、図5に示すように、第1ヨー方向高分子ACT204Aに代えてヨー方向スプリング206を備え、第2ピッチ方向高分子ACT205Bに代えてピッチ方向スプリング207を備えている。
このようなヨー方向スプリング206及びピッチ方向スプリング207は、手振れを検出していない状況においては、図2に示したような長さに設計されたものが使用される。これに対して、手振れ検出回路141が撮像装置1の手振れを検出した場合、当該手振れ検出信号のヨー角成分を打ち消すように第2ヨー方向高分子ACT204Bを伸縮動作させたことに応じて、ヨー方向スプリング206に対して付勢力を与えて伸縮させる。同様に、手振れ検出信号のピッチ角成分を打ち消すように第1ピッチ方向高分子ACT205Aを伸縮動作させたことに応じて、ピッチ方向スプリング207に対して付勢力を与えて伸縮させる。
更に他の構成としては、手振れ補正機構200は、第1ヨー方向高分子ACT204A、第2ヨー方向高分子ACT204B、第1ピッチ方向高分子ACT205A、第2ピッチ方向高分子ACT205Bのそれぞれに、金属のスプリングを取り付けても良い。この手振れ補正機構200は、図6に示すように、高分子アクチュエータ204A,204B,205A,205Bよりも内径が大きいスプリング206A,206B,207A,207Bが設けられている。このような構成であっても、スプリング206A,206B,207A,207Bの付勢力に対向して、一方のアクチュエータを伸長するように駆動すると共に対向した他方のアクチュエータを収縮するように駆動することによって、上述した手振れ補正機構200と同じ動作を行うことができる。
つぎに、上述したように構成された撮像装置1の動作について、図7を参照して説明する。なお、以下の説明においては、図2に示した手振れ補正機構200を搭載した撮像装置1について説明するが、図3乃至図6に示した手振れ補正機構200にも適用可能であることは勿論である。
制御回路101は、図示しないプログラムメモリに格納されたプログラムに従って動作することによって、図7に示すフローチャートに従って処理を実行する。先ず、制御回路101は、先ずステップS1において、ユーザによる操作を入力回路121によって検出し、現在の動作モードが撮影モードに設定されているか否かを判断する。現在の動作モードが撮影モードに設定されていない場合には、ステップS2に処理を進めて、その他のモードの処理を実行する。
撮影モードが設定されている場合には、制御回路101は、ステップS3において露出条件などの撮影条件を設定するとともに、ステップS4において測光処理、AF処理を実行する。
次のステップS5において、制御回路101は、入力回路121からズーム操作をした操作信号を入力したか否かを判定する。ユーザがズーム操作をしたと判定した場合には、ステップS6において、ズーム処理を行う。このズーム処理は、操作信号によってズーム方向及びズーム量を判断し、当該ズーム方向及びズーム量を含む命令をズームレンズ駆動回路117に供給し、ズームレンズ駆動回路117によって駆動モータ117aを動作させてズームレンズ111bを移動させる。
次に制御回路101は、ステップS7において、フォーカスレンズ駆動回路118及び駆動モータ118aを動作させてフォーカスレンズ111aを移動させるAF処理を実行する。そして、制御回路101は、ステップS8において、映像信号処理回路113から供給された撮像画像データを表示メモリ131に転送し、表示駆動回路132によってライブビュー画像(スルー画像)を表示モニタ133に表示させる。これにより、ユーザは表示モニタ133に表示されたスルー画像を見ながら、この撮像装置1の向きを調整する等してシャッタチャンスを伺う。
次に制御回路101は、ステップS9において、入力回路121からの操作信号に基づいてシャッター機構122(レリーズ釦)が半押しされたか否かを判断する。例えばシャッタチャンスとなった時点でユーザがシャッター機構122を半押しすると、ステップS9の判断がYESとなり、ステップS11に処理を進める。一方、絞り駆動回路112が半押しされていない場合には、ステップS10にてユーザの操作に応じてその他のキー処理及び表示処理を実行する。
ステップS11において、制御回路101は、測光処理、AE/AFロック処理を実行し、WB処理を行って得られた測光値とステップS3で設定された撮影条件とに応じて、露出時間を設定する。
次のステップS12において、制御回路101は、手振れ補正機能がオンとされているか否かを判定する。手振れ補正機能がオンである場合には、ステップS13において、手振れ検出回路141を起動し、手振れ検出回路141によってヨー角成分及びピッチ角成分の手振れ量を示す手振れ検出信号を順次検出させる。一方、手振れ補正機能がオンとはされていない場合にはステップS19に処理を進める。
次に制御回路101は、ステップS14において、スルー画像を表示しているスルー表示時に手振れ補正機能がオンとなっているか否かを判定し、オンとなっている場合にはステップS15に処理を進め、オンとはなっていない場合にはステップS19に処理を進める。
ステップS15において、制御回路101は、手振れ検出回路141から取得した手振れ検出信号によって示されているヨー角成分の手振れ量θyaw及びピッチ角成分の手振れ量θPitchから、手振れ補正に必要な補正レンズ111cの変位量を求める。ここで、補正レンズ111cを光軸と直交方向に移動して手振れ補正を行う場合、手振れ補正係数TSは、
TS=(1−βS)βE (式1)
となる。また、手振れ補正に必要な補正レンズ111cのヨー方向の変位量△Xは、上記式1のTSを用いて
△X=f・fan(θ)/TS
=−(fS・βE)tan(θ)/{(1−βS)βE}
=−{fS/(1−βS)}・tan(θ) (式2)
となる。ここで、θは、手振れ検出回路141により検出されたヨー角成分、ピッチ角成分の手振れ角度、fは撮像光学系111全体の焦点距離、fSは補正レンズ111cの焦点距離、βSは補正レンズ111cの焦点距離、βEは補正レンズ111cよりも像面側のレンズ群の倍率である。例えば、ヨー角成分、ピッチ角成分の手振れ検出量をそれぞれθyaw、θpitchすると、ヨー角成分、ピッチ角成分の変位量は、
△X=−{fS/(1−βS)}・tan(θyaw) (式3)
△Y=−{fS/(1−βS)}・tan(θpitch) (式4)
となる。
次のステップS16において、制御回路101は、ステップS15で求めた上記式3,式4で表される補正レンズ111cの変位量(△X,△Y)に応じて、ヨー方向及びピッチ方向の両方向の第1ヨー方向高分子ACT204A及び第2ヨー方向高分子ACT204B、第1ピッチ方向高分子ACT205A及び第2ピッチ方向高分子ACT205Bを伸縮動作させる。このとき、制御回路101は、補正レンズ111cの変位方向及び変位量を含む制御信号を供給して、手振れ補正駆動回路119によって各アクチュエータを動作させるように電圧を印加させる。
これにより、撮像装置1は、次のステップS17において、対向する第1ヨー方向高分子ACT204Aと第2ヨー方向高分子ACT204B、第1ピッチ方向高分子ACT205Aと第2ピッチ方向高分子ACT205Bの一方を伸長させた分だけ他方を収縮させて、補正レンズ111cを変位させる。
そして、撮像装置1は、ステップS18において、手振れ補正のために各アクチュエータに対する電圧印加を停止すると、各アクチュエータの自己復帰力を利用して、撮像光学系111の光学中心にセンタリング処理を行わせる。
次のステップS19において、制御回路101は、シャッター機構122におけるレリーズ釦が全押しされたか否かを、入力回路121からの操作信号によって判断する。レリーズ釦が全押しされていない場合にはステップS12に処理を戻し、ユーザが半押ししていたレリーズ釦を全押しすると、ステップS20に処理を進める。
次のステップS20において、制御回路101は、測光値と露出条件に応じて露出タイマーを設定し、タイマー計時を開始する。
次のステップS21において、制御回路101は、撮像時における手振れ補正機能がオンとなっているか否かを判定する。手振れ補正機能がオンとなっている場合には、ステップS22に処理を進め、オンとなってはいない場合にはステップS27に処理を進める。
ステップS22において、制御回路101は、手振れ検出回路141によって検出されているヨー方向及びピッチ方向それぞれの手振れ量を示す手振れ検出信号を受信して、順次記録する。そして、制御回路101は、ステップS23において、ステップS15にて行った処理と同様の処理を行って、手振れ検出回路141から取得した手振れ検出信号によって示されているヨー角成分の手振れ量θyaw及びピッチ角成分の手振れ量θPitchから、手振れ補正に必要な補正レンズ111cの変位量を求める。
次のステップS24において、制御回路101は、ステップS23で求めた補正レンズ111cの変位量に応じて、ヨー方向及びピッチ方向の両方向の第1ヨー方向高分子ACT204A及び第2ヨー方向高分子ACT204B、第1ピッチ方向高分子ACT205A及び第2ピッチ方向高分子ACT205Bを伸縮動作させる。このとき、制御回路101は、補正レンズ111cの変位方向及び変位量を含む制御信号を供給して、手振れ補正駆動回路119によって各アクチュエータを動作させるように電圧を印加させる。
これにより、撮像装置1は、次のステップS25において、対向する第1ヨー方向高分子ACT204Aと第2ヨー方向高分子ACT204B、第1ピッチ方向高分子ACT205Aと第2ピッチ方向高分子ACT205Bの一方を伸長させた分だけ他方を収縮させて、補正レンズ111cを変位させる。
そして、撮像装置1は、ステップS26において、手振れ補正のために各アクチュエータに対する電圧印加を停止すると、各アクチュエータの自己復帰力を利用して、撮像光学系111の光学中心にセンタリング処理を行わせる。
その後、撮像装置1は、ステップS27において、ステップS3などによって設定されている撮影条件に応じて露出/撮影動作を開始し、イメージセンサ115が露出状態となる。次に、制御回路101は、ステップS28において、ステップS20にて計時を開始した露出タイマーにより計時している露出時間が終了となったか否か、つまり露出タイマーの残時間が「0」となったか否かを判断する。露出時間が終了となってない場合には、ステップS21に戻って、このステップS21からの処理を繰り返し実行する。一方、露出時間が終了した場合には、ステップS29において、制御回路101は、映像信号処理回路113から撮像画像データを取得して、画像信号処理回路161によって撮影画像を圧縮、符号化し、この圧縮、符号化した撮影画像データをメモリカード部192におけるメモリカードに記録する。
つぎに、手振れ補正機構200の更なる他の構成について説明する。
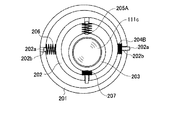
図8に示すような手振れ補正機構200は、一対の紐状又はベルト状の第1及び第2高分子アクチュエータ211A,211Bによってヨー方向シフト枠202を変位させると共に、同じく一対の第1及び第2高分子アクチュエータ212A,212Bによってピッチ方向シフト枠203を変位させる構成となっている。第1及び第2ヨー方向高分子ACT211A,211Bはその両端部が固定枠201の内壁に設けられた電極部213に固定されている。電極部213は、固定枠201において上下方向に対向して設けられて、ヨー方向高分子ACT211A,211Bを固定している。また、第1及び第2ピッチ方向高分子ACT212A,212Bは、ヨー方向シフト枠202の内壁に設けられた電極部214に固定されている。電極部214は、固定枠202において左右方向に対向して設けられて、ピッチ方向高分子ACT212A,212Bを固定している。
第1及び第2ヨー方向高分子ACT211A,211B、第1及び第2ピッチ方向高分子ACT212A,212Bは、1対の紐状又はベルト状の形態となっている。第1及び第2ヨー方向高分子ACT211A,211Bは、ヨー方向シフト枠202を取り囲むように当該ヨー方向シフト枠202の外周壁に配される。ヨー方向シフト枠202は、上述したヨー方向シフト枠202とは異なり、第1及び第2ヨー方向高分子ACT211A,211Bを安定して取り付けるための段差が設けられている。このため、ヨー方向シフト枠202は、第1及び第2ヨー方向高分子ACT211A,211Bに加えられる引っ張り応力の相違に応じた変位量だけヨー方向にスライドされる。
同様に第1及び第2ピッチ方向高分子ACT212A,212Bは、ピッチ方向シフト枠203を取り囲むように当該ピッチ方向シフト枠203の外周壁に配される。ピッチ方向シフト枠203は、上述したピッチ方向シフト枠203とは異なり、第1及び第2ピッチ方向高分子ACT212A,212Bを安定して取り付けるための段差が設けられている。このため、ピッチ方向シフト枠203は、第1及び第2ピッチ方向高分子ACT212A,212Bに加えられる引っ張り応力の相違に応じた変位量だけピッチ方向にスライドされる。
第1及び第2ヨー方向高分子ACT211A,211Bのそれぞれには、手振れ量に応じて補正レンズ111cをヨー方向において変位させる電圧が、電極部213を介して印加される。これにより、第1及び第2ヨー方向高分子ACT211A,211Bは、補正レンズ111cをヨー方向において変位可能とする。同様に、第1及び第2ピッチ方向高分子ACT212A,212Bのそれぞれには、手振れ量に応じて補正レンズ111cをピッチ方向において変位させる電圧が、電極部214を介して印加される。これにより、第1及び第2ピッチ方向高分子ACT212A,212Bは、補正レンズ111cをピッチ方向において変位可能とする。
図8に示す状態においては、補正レンズ111cは、固定枠201、ヨー方向シフト枠202及びピッチ方向シフト枠203の中心であるセンタリング位置よりも図面中左下に変位した状態を示している。補正レンズ111cをヨー方向における左側に変位させるためには、第2ヨー方向高分子ACT211Bに与える引っ張り応力を、第1ヨー方向高分子ACT211Aに与える引っ張り応力よりも高くする。これにより、ヨー方向シフト枠202を図中左側のヨー方向にスライドさせて、補正レンズ111cを変位させることができる。同様に、補正レンズ111cをピッチ方向における下方向に変位させるためには、第1ピッチ方向高分子ACT212Aに与える引っ張り応力を、第2ピッチ方向高分子ACT212Bに与える引っ張り応力よりも高くする。これにより、ピッチ方向シフト枠203を図中下側のピッチ方向にスライドさせて、補正レンズ111cを変位させることができる。
このように第1及び第2ヨー方向高分子ACT211A,211B及び第1及び第2ピッチ方向高分子ACT212A,212Bを制御するためには、図9に示すように、ヨー方向シフト枠202又はピッチ方向シフト枠203の半径r、ヨー方向シフト枠202又はピッチ方向シフト枠203の中心から第1及び第2ヨー方向高分子ACT211A,211B又は第1及び第2ピッチ方向高分子ACT212A,212Bの取り付け位置までの距離(r+a)、手振れ量に応じて必要な補正レンズ111cの変位量を△xとして、第1及び第2ヨー方向高分子ACT211A,211B、第1及び第2ピッチ方向高分子ACT212A,212Bの長さL、補正レンズ111cを変位させるために第1及び第2ヨー方向高分子ACT211A,211B、第1及び第2ピッチ方向高分子ACT212A,212Bに必要な長さ変位量△Lは、下記の式で決定される。
変位量△Lは、下記のように
△L=L−L0 (式5)
で示される。ここで、Lは伸縮時の長さ、L0は初期位置における長さである。そして、伸縮時の長さは、
L=2(L1+L2)=2[2πr(α/2π)+r/tan(α−β)] (式6)
で表される。ここで、L2は、電極部213、214からヨー方向シフト枠202、ピッチ方向シフト枠203に接するまでの長さであり、L1はL2の終点からヨー方向シフト枠202、ピッチ方向シフト枠203の中心を通り線分A−Bと直交する先との交点である。
ここで、
角度α=sin−1{r/b}±β=sin−1{rcosβ/(r+a)}±β、
角度β=tan−1{△x/(r+a)}、
対角b=[{(△x)2+(r+a)2}]1/2=(r+a)/cosβ
となる。また、初期位置(d=0、β=0)の時、
α0=sin−1{r/(r+a)}
となるので、初期位置における長さL0は、
L0=2[2πr(α0/2π)+r/tan(α0)] (式7)
となる。したがって、式5に対して、式6で示されるLと式7で示されるL0とから、第1及び第2ヨー方向高分子ACT211A,211B、第1及び第2ピッチ方向高分子ACT212A,212Bの変位量△Lを求めることができる。
このような手振れ補正機構200を備えた撮像装置1によれば、第1及び第2ヨー方向高分子ACT211A,211B及び第1及び第2ピッチ方向高分子ACT212A,212Bをそれぞれ独立に応力の制御を行うことにより、上述した撮像装置1と同様に、ヨー方向、ピッチ方向で独立して補正レンズ111cの変位量を制御することができる。
具体的には、上述した図2に示した手振れ補正機構200によって手振れ補正を行うための図7の処理を、図8に示した手振れ補正機構200にも適用可能である。図8に示す手振れ補正機構200を備えた撮像装置1は、図7に示したステップS15,ステップS23にて求めたヨー方向における補正レンズ111cのヨー方向変位量△x、ピッチ方向変位量△yに従って、ステップS16〜ステップS18,ステップS24〜ステップS26のように第1及び第2ヨー方向高分子ACT211A,211B及び第1及び第2ピッチ方向高分子ACT212A,212Bの伸縮状態を制御する。
すなわち、ステップS16,ステップS24において、制御回路101は、ステップS15,ステップS23で求めた上記式3,式4で表される補正レンズ111cの変位量(△X,△Y)に応じて、ヨー方向及びピッチ方向の両方向の第1及び第2ヨー方向高分子ACT211A,211B、第1及び第2ピッチ方向高分子ACT212A,212Bを伸縮動作させる。このとき、制御回路101は、補正レンズ111cの変位方向及び変位量を含む制御信号を供給して、手振れ補正駆動回路119によって各アクチュエータを動作させるように電圧を印加させる。
このとき、ヨー方向の変位方向に応じて第1ヨー方向高分子ACT211A,第2ヨー方向高分子ACT211Bの何れかの引っ張り応力を高くすると同時に、当該高くする応力量をヨー方向の変位量に応じて決定する。同様に、ピッチ方向の変位方向に応じて第1ピッチ方向高分子ACT212A,第2ピッチ方向高分子ACT212Bの何れかの引っ張り応力を高くすると同時に、当該高くする応力量をピッチ方向の変位量に応じて決定する。具体的には、図8のように図中左方向に補正レンズ111cを移動させる場合には第2ヨー方向高分子ACT211Bの引っ張り応力を、第1ヨー方向高分子ACT211Bよりも高くすると同時に、当該第2ヨー方向高分子ACT211Bの高くする引っ張り応力量を補正レンズ111cの変位量△xによって決定する。同様に、図8のように図中下方向に補正レンズ111cを移動させる場合には第1ピッチ方向高分子ACT212Bの引っ張り応力を、第2ピッチ方向高分子ACT212Bよりも高くすると同時に、当該第1ピッチ方向高分子ACT212Bの高くする引っ張り応力量を補正レンズ111cの変位量△yによって決定する。
これにより、撮像装置1は、次のステップS17,ステップS25においては、補正レンズ111cを変位させることができ、ステップS18,ステップS26において、手振れ補正のために各アクチュエータに対する電圧印加を停止すると、各アクチュエータの自己復帰力を利用して、撮像光学系111の光学中心にセンタリング処理を行わせる。
このように、撮像装置1は、図8に示した手振れ補正機構200を搭載した場合であっても、図2に示した手振れ補正機構200と同様の処理によって補正レンズ111cの変位量を求めて、第1及び第2ヨー方向高分子ACT211A,211Bをそれぞれ独立に伸縮すると共に、第1及び第2ピッチ方向高分子ACT212A,212Bをそれぞれ独立に伸縮することによって、補正レンズ111cを手振れ補正することができる。したがって、撮像装置1によれば、小型且つ低消費電力の手振れ補正を実現できる。
つぎに、本実施形態における更に他の手振れ補正機構200について説明する。
この手振れ補正機構200は、図10に示すように、高分子アクチュエータの屈曲動作によって、ヨー方向、ピッチ方向の各移動方向ごとに、ヨー方向シフト枠202、ピッチ方向シフト枠203をスライドさせる構成となっている。この手振れ補正機構200における高分子アクチュエータは、所謂屈曲型のものである。この屈曲型の高分子アクチュエータは、印加された電圧に応じて反り量又は張り量が変化するものである。なお、上述したアクチュエータは、伸縮型の高分子アクチュエータである。この屈曲型の高分子アクチュエータは、ヨー方向シフト枠202に設けられたスライド片223に対して左右方向(ヨー方向)の応力を与えるヨー方向高分子ACT221と、ピッチ方向シフト枠203に設けられたスライド片228に対して上下方向(ピッチ方向)の応力を与えるピッチ方向高分子ACT222とからなる。
ヨー方向高分子ACT221は、一方の端部スライド片223をヨー方向における両端から挟み込み、他方の端部が固定枠201に設けられた固定片224に当接するように設けられている。このようなヨー方向高分子ACT221に対向する部分には、ヨー方向シフト枠202に設けられたスライド片225と、ヨー方向におけるスライド方向に設けられたヨー方向ガイドレール226と、固定片227とが設けられている。スライド片225は、ヨー方向ガイドレール226に沿って、ヨー方向ガイドレール226の両端間でスライド可能となっている。したがって、補正レンズ111cをヨー方向においてスライドさせる場合には、2個のヨー方向高分子ACT221のそれぞれに対して、反り量を多く又は少なくするように電圧を印加して、スライド片223に対して与える力を変化させる。これによりスライド片225は、スライド片223がスライドする応力に従ってヨー方向ガイドレール226に沿ってスライドし、結果として補正レンズ111cをヨー方向において変位させることができる。
ヨー方向高分子ACT221は、一方の端部スライド片223をヨー方向における両端から挟み込み、他方の端部が固定枠201に設けられた固定片224に当接するように設けられている。このようなヨー方向高分子ACT221に対向する部分には、ヨー方向シフト枠202に設けられたスライド片225と、ヨー方向におけるスライド方向に設けられたヨー方向ガイドレール226と、固定片227とが設けられている。スライド片225は、ヨー方向ガイドレール226に沿って、ヨー方向ガイドレール226の両端間でスライド可能となっている。したがって、補正レンズ111cをヨー方向においてスライドさせる場合には、2個のヨー方向高分子ACT221のそれぞれに対して、スライド片223をスライドさせるように電圧を印加する。これによりスライド片225は、スライド片223がスライドする応力に従ってヨー方向ガイドレール226に沿ってスライドし、結果として補正レンズ111cをヨー方向において変位させることができる。
ピッチ方向高分子ACT222は、一方の端部がスライド片228をピッチ方向における両端から挟み込み、他方の端部が固定枠201に設けられた固定片229に当接するように設けられている。このようなピッチ方向高分子ACT222に対向する部分には、ピッチ方向シフト枠203に設けられたスライド片230と、ピッチ方向におけるスライド方向に設けられたピッチ方向ガイドレール230と、固定片232とが設けられている。スライド片230は、ピッチ方向ガイドレール230に沿って、ピッチ方向ガイドレール230の両端間でスライド可能となっている。したがって、補正レンズ111cをピッチ方向においてスライドさせる場合には、2個のピッチ方向高分子ACT222のそれぞれに対して、スライド片228をスライドさせるように電圧を印加する。これによりスライド片230は、スライド片228がスライドする応力に従ってピッチ方向ガイドレール230に沿ってスライドし、結果として補正レンズ111cをピッチ方向において変位させることができる。
このような手振れ補正機構200であっても、2個のヨー方向高分子ACT221をそれぞれ制御することによってヨー方向における補正レンズ111cの位置を調整すると共に、2個のピッチ方向高分子ACT222をそれぞれ制御することによってピッチ方向における補正レンズ111cの位置を調整することができる。
つぎに、本実施形態における更に他の手振れ補正機構200について説明する。
この手振れ補正機構200は、図11(a)に示すように、積層バネ伸縮型の高分子アクチュエータであるピッチ方向高分子ACT241、ヨー方向高分子ACT244により、スライド部242,245をガイド溝243,246に沿ってスライドさせるものである。ピッチ方向高分子ACT241は、スライド部242を挟んで設けられた一対の積層バネ伸縮型の高分子アクチュエータである。このようなスライド部242,245における構造は、図11(b)に示すように、スライド部242,245の下部に形成された固定枠201、ヨー方向シフト枠202に設けられたガイド溝243,246内に球体247が収容されている。
このように構成された手振れ補正機構200は、一対の積層バネ伸縮型の高分子アクチュエータのそれぞれのバネ応力が、印加される電圧によって調整される。これにより、双方のスライド部242に与える応力のバランスによって、スライド部242をガイド溝243に沿ってスライドさせることができる。
このように、図11に示した手振れ補正機構200であっても、一対のヨー方向高分子ACT244をそれぞれ制御することによってヨー方向における補正レンズ111cの位置を調整すると共に、一対のピッチ方向高分子ACT241をそれぞれ制御することによってピッチ方向における補正レンズ111cの位置を調整することができる。
つぎに、上述したような高分子アクチュエータを利用した撮像装置1において、撮像光学系111を所謂屈曲光軸式のズーム光学系を備えたものとした実施形態について説明する。図12は屈曲光軸式のズーム光学系における撮像光学系111の一例である。この撮像光学系111は、支点252を中心にしてヨー方向及びピッチ方向の双方に回転可能なミラー251を用いて、外部からの光の光軸を屈曲させて、イメージセンサ115に導く。
このミラー251は、外部からの光をイメージセンサ115に向けて導く撮像光学系111に含まれる。このミラー251は、その背面に、一対の積層バネ伸縮型の第1及び第2高分子アクチュエータ253,254が設けられ、手振れ補正機構200を構成する。第1高分子アクチュエータ253には、当該第1高分子アクチュエータ253に印加する電圧を調整する第1駆動部255が接続され、第2高分子アクチュエータ254には、当該第2高分子アクチュエータ254に印加する電圧を調整する第2駆動部256が接続されている。
第1及び第2駆動部255,256は、手振れ検出回路141によって検出された手振れ量に応じて、第1及び第2高分子アクチュエータ253,254を駆動させることによって、ミラー251を縦(ピッチ方向の回転)、横(ヨー方向の回転)に自在に回転支持する。これにより、この第1及び第2高分子アクチュエータ253,254、第1及び第2駆動部255,256は、ヨー方向、ピッチ方向の手振れ量を打ち消す方向に第1及び第2高分子アクチュエータ253,254を駆動して、光軸のブレを補正して、手振れ補正を行う。このような手振れ補正機能であっても、第1及び第2高分子アクチュエータ253,254を制御することによって、ヨー方向、ピッチ方向にミラー251を回転させて、手振れ補正を実現することができる。
更に他の手振れ補正機構200としては、図13に示すように、ピッチ方向に回転する回転ディスク262に巻き付けるように伸縮型の第1高分子アクチュエータ261を設けると共に、ヨー方向に回転する回転ディスク263(図14参照)に巻き付けるように伸縮型の第2高分子アクチュエータ264を設けた構成であっても良い。このような手振れ補正機構200は、図13では、ヨー方向の回転機構を省略して示している。このような手振れ補正機構200において、第1高分子アクチュエータ261及び第2高分子アクチュエータ264は、それぞれ異なるアクチュエータ端子(図示せず)に接続されている。
このような手振れ補正機構200は、図14(a)、(b)に側面図に示すように、第1高分子アクチュエータ261を伸縮させることによってミラー251をピッチ方向Pに回転させることができる。ミラー251のヨー方向の回転機構は、ピッチ方向にミラー251を回転させる構成よりも背面側に設けられている。
ヨー方向の回転機構は、図14(b)に正面図、(c)に背面図を示すように、最背面にヨー方向に回転する回転ディスク263が設けられ、当該回転ディスク263に第2高分子アクチュエータ264が巻き付けられている。また、回転ディスク263の前面側には、手振れ補正機構200全体における上下位置調整する機構265が設けられている。
このように構成された手振れ補正機構200は、手振れ検出回路141によって検出された手振れ方向及び手振れ量に応じて、第1高分子アクチュエータ261に印加する電圧及び第2高分子アクチュエータ264に印加する電圧をそれぞれ独立して制御する。これにより、手振れ補正機構200によれば、ミラー251をピッチ方向及びヨー方向のそれぞれに自在に回転させて、手振れ補正を実現することができる。
このように、図12乃至図14に示した手振れ補正機構200によれば、図15(a)に示すように、手振れが手振れ検出回路141によって検知されていない時には、ミラー251によって被写体からの入射光L1を90度の角度で反射して、イメージセンサ115に撮像光L2として導くことができる。手振れが発生すると、図14(b)に示すように、手振れ(+△θ)分だけ入射光L1がずれて入射され、その結果として撮像光L2がイメージセンサ115に入射される位置が像ブレ(△x=f・tan(△θ))として現れる。
これに対し、手振れ補正機構200は、例えば図12の構成の場合について図15(c)に示すが、手振れ量(△θ)に応じてミラー251を△θ/2だけ回転させて、新たなミラー251’の位置とする。このとき、手振れ補正機構200は、一方の高分子アクチュエータ254を伸長するように電圧を印加し、他方の高分子アクチュエータ253を収縮するように電圧を印加する。これにより、ミラー251によって反射された撮像光L2は、像ブレ無くイメージセンサ115に入射させることができる。
このように、ミラー251を回転駆動して手振れ補正機能を実現する撮像装置1の動作について、図16を参照して説明する。なお、この図16を参照して行う以下の説明は、図12に示すようなミラー251を回転駆動させて手振れを補正することについて説明する。なお、以下の動作は、ミラー251を(微少角度の)パーン、チルト動作のために積極的に駆動させつつ、かつ、手振れ補正も行うものである。
先ず撮像装置1は、ステップS101において、映像信号処理回路113から供給された撮像画像データを表示メモリ131に転送し、表示駆動回路132によってライブビュー画像(スルー画像)を表示モニタ133に表示させている状態か否か、又は当該スルー画像を記録する動画撮影中か否かを判定する。スルー画像を表示している状態又は動画撮影中である場合にはステップS103において測光処理、ホワイトバランス(WB)処理を実行し、そうではない場合にはステップS102に処理を進めて、その他のモードの処理を実行する。
次のステップS104において、制御回路101は、手振れ補正機能がオンとされているか否かを判定する。手振れ補正機能がオンである場合には、ステップS105において、手振れ検出回路141を起動し、ステップS106において、手振れ検出回路141によってヨー角成分及びピッチ角成分の手振れ量を示す手振れ検出信号を順次検出させる。一方、手振れ補正機能がオンとはされていない場合にはステップS107に処理を進める。
次に制御回路101は、ステップS107において、電動式パーン操作があったか否かを判定すると共に、ステップS109において、電動式チルト操作があったか否かを判定する。ステップS107において、ミラー251を駆動して自動的に撮像方向をヨー方向に回転させる電動式パーン操作がなされた場合にはステップS108の処理に移行する。またステップS109において、ミラー251を駆動して自動的に撮像方向をピッチ方向に回転させる電動式チルト操作がなされた場合にはステップS110の処理に移行する。
ステップS108において、制御回路101は、ミラー251をヨー方向に回転させる。このとき、制御回路101は、ミラー251におけるヨー方向回転用の高分子アクチュエータに、ステップS107にて判定したパーン操作の操作量に応じた大きさ及び向きの電圧を印加する。これにより、高分子アクチュエータを伸縮動作させて、ミラー251をヨー方向に回転させて、当該ミラー251によって反射される撮像光の光軸をヨー方向にパーン回転させる。
ステップS110において、制御回路101は、ミラー251をピッチ方向に回転させる。このとき、制御回路101は、ミラー251におけるピッチ方向回転用の高分子アクチュエータに、ステップS109にて判定したチルト操作の操作量に応じた大きさ及び向きの電圧を印加する。これにより、高分子アクチュエータを伸縮動作させて、ミラー251をピッチ方向に回転させて、当該ミラー251によって反射される撮像光の光軸をピッチ方向にチルト回転させる。
次のステップS111において、制御回路101は、入力回路121からズーム操作をした操作信号を入力したか否かを判定する。ユーザがズーム操作をしたと判定した場合には、ステップS112において、ズーム処理を行う。このズーム処理は、操作信号によってズーム方向及びズーム量を判断し、当該ズーム方向及びズーム量を含む命令をズームレンズ駆動回路117に供給し、ズームレンズ駆動回路117によって駆動モータ117aを動作させてズームレンズ111bを移動させる。次に制御回路101は、ステップS113において、フォーカスレンズ駆動回路118及び駆動モータ118aを動作させてフォーカスレンズ111aを移動させるAF処理を実行する。
次のステップS114において、制御回路101は、手振れ補正機能がオンとされているか否かを判定する。手振れ補正機能がオンである場合には、ステップS115以降に処理を進め、手振れ補正機能がオンとはなっていない場合にはステップS123に処理を進める。
制御回路101は、ステップS115においてミラー251によってパーン回転の動作中か否かを判定し、ステップS118においてミラー251によってチルト回転の動作中か否かを判定する。パーン動作中である場合にはステップS116及びステップS117の処理を行い、チルト動作中である場合にはステップS119及びステップS120の処理を行い、パーン動作及びチルト動作のいずれもしていない場合にはステップS121及びステップS122の処理を行う。
ステップS116において、制御回路101は、手振れ検出回路141から手振れ検出信号を取得し、ピッチ角成分の手振れ量θPから、手振れ補正に必要な補正レンズ111cの変位量(−θP/2)を算出する。次のステップS117において、制御回路101は、ステップS116で求めた補正レンズ111cの変位量(−θP/2)に応じた大きさで、手振れ方向とは逆のピッチ方向にミラー251を回転させるように、ピッチ方向の高分子アクチュエータに対して電圧を印加させる。これにより、手振れをうち消すようにピッチ方向の高分子アクチュエータを伸縮動作させる。
ステップS118にてチルト動作中と判断された後のステップS119において、制御回路101は、手振れ検出回路141から手振れ検出信号を取得し、ヨー角成分の手振れ量θYから、手振れ補正に必要な補正レンズ111cの変位量(−θY/2)を算出する。次のステップS120において、制御回路101は、ステップS119で求めた補正レンズ111cの変位量(−θY/2)に応じた大きさで、手振れ方向とは逆のヨー方向にミラー251を回転させるように、ヨー方向の高分子アクチュエータに対して電圧を印加させる。これにより、手振れをうち消すようにヨー方向の高分子アクチュエータを伸縮動作させる。
パーン動作及びチルト動作のいずれもしていない場合、ステップS121において、制御回路101は、手振れ検出回路141から手振れ検出信号を取得し、ヨー角成分の手振れ量θY及びピッチ角成分の手振れ量θPから、手振れ補正に必要な補正レンズ111cの変位量(−θY/2,−θP/2)を算出する。次のステップS122において、制御回路101は、ステップS121で求めた補正レンズ111cの変位量(−θY/2,−θP/2)に応じた大きさで、手振れ方向とは逆のヨー方向及びピッチ方向にミラー251を回転させるように、ヨー方向、ピッチ方向の高分子アクチュエータに対して電圧を印加させる。これにより、手振れをうち消すようにヨー方向の高分子アクチュエータ、ピッチ方向の高分子アクチュエータを伸縮動作させる。
次のステップS123において、表示モニタ133にスルー画像を表示させ、ステップS124にて撮影処理を行った後、ステップS125において、映像信号処理回路113から撮像画像データを取得して、画像信号処理回路161によって撮影画像を圧縮、符号化し、この圧縮、符号化した撮影画像データをメモリカード部192におけるメモリカードに記録する。その後、撮像装置1は、ステップS126にてその他のキー処理及び表示処理を実行する。
以上説明したように、図12等に示したミラー251を備えた手振れ補正機構200であっても、入射光が手振れによってずれたことを手振れ検出回路141からの手振れ検出信号によって検出してミラー251をヨー方向及びピッチ方向に回転させることができる。これにより、この手振れ補正機構200によれば、高分子アクチュエータを用いてミラー251を回転駆動させて、手振れ補正を実現することができる。
なお、上述の実施の形態は本発明の一例である。このため、本発明は、上述の実施形態に限定されることはなく、この実施の形態以外であっても、本発明に係る技術的思想を逸脱しない範囲であれば、設計等に応じて種々の変更が可能であることは勿論である。