JP2010068520A - 光センサシステム、光センサデバイスおよび光センサデバイスを光センサシステムのバスに接続するためのバスセグメント - Google Patents
光センサシステム、光センサデバイスおよび光センサデバイスを光センサシステムのバスに接続するためのバスセグメント Download PDFInfo
- Publication number
- JP2010068520A JP2010068520A JP2009204555A JP2009204555A JP2010068520A JP 2010068520 A JP2010068520 A JP 2010068520A JP 2009204555 A JP2009204555 A JP 2009204555A JP 2009204555 A JP2009204555 A JP 2009204555A JP 2010068520 A JP2010068520 A JP 2010068520A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- sensor device
- bus
- signal
- segment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 47
- 230000008878 coupling Effects 0.000 claims description 14
- 238000010168 coupling process Methods 0.000 claims description 14
- 238000005859 coupling reaction Methods 0.000 claims description 14
- 239000013307 optical fiber Substances 0.000 claims description 11
- 230000003111 delayed effect Effects 0.000 claims description 8
- 230000000295 complement effect Effects 0.000 claims description 5
- 210000003813 thumb Anatomy 0.000 claims description 2
- 230000000694 effects Effects 0.000 claims 1
- 210000003811 finger Anatomy 0.000 claims 1
- 238000011156 evaluation Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 5
- 230000001960 triggered effect Effects 0.000 description 5
- 238000005520 cutting process Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 210000005224 forefinger Anatomy 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/246—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains by varying the duration of individual pulses
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
- Optical Communication System (AREA)
Abstract
【解決手段】1つ以上の光センサデバイス(1、1’)と、マスターデバイス(2)と、前記センサデバイス(1、1’)と前記マスターデバイス(2)とを接続する電気バスとを備える光センサシステムにおいて、前記センサデバイス(1、1’)によって発生された同期イベント(38、39)は、前記マスターデバイス(2)へ送信され、前記マスターデバイスは、これら同期イベント(38、39)から前記センサデバイスの出力値を抽出するための手段(30、34、35)を備える。
【選択図】図3
Description
本発明の第2の目的は、センサシステムのうちの別のセンサデバイスと同期化するようになっている光センサデバイスを製造するコストを低減することにある。
2 マスターデバイス
6、6’ 送信機
7 受信機
8、9、10 光セクション
18、18’ ダイオード
30、34、35 抽出手段
36、38、39 同期イベント
MI 信号入力ターミナル
MO 信号出力ターミナル
SI,SI’ 信号入力ターミナル
SO 信号出力ターミナル
Claims (15)
- 1つ以上の光センサデバイス(1、1’)と、マスターデバイス(2)と、前記センサデバイス(1、1’)と前記マスターデバイス(2)とを接続する電気バスとを備える光センサシステムであり、前記マスターデバイス(2)の信号出力ターミナル(MO)と前記センサデバイスの信号入力および出力ターミナル(SI、SO、SI’)とは、デージーチェーンパターンに従ってペアとして接続され、前記バスの信号デージーチェーンを形成しており、各センサデバイスは、光を第1光ファイバー(8)に送るための電気光学的送信機(6)と、受信した光を第2光ファイバー(9)を通して検出するための電気光学的受信機(7)と、前記送信機(6)と前記受信機(7)との間の光セクション(8、9、10)の状態を示す出力値を決定するための手段とを備え、前記マスターデバイス(2)は、その信号出力ターミナル(MO)に同期イベント(36)を発生するようになっており、各センサデバイス(1、1’)は、その信号入力ターミナル(SI、SI’)で生じる同期イベント(36、38)を検出し、その同期イベント(36、38)に基づき、前記送信機(6、6’)のアクティビティのタイミングを定めると共に、前記検出された同期イベント(36、38)に対して所定のオフセット時間(T)だけ遅延された同期イベント(38、39)を信号出力ターミナル(SO、SO’)において発生させるようになっている光センサシステムにおいて、
前記センサデバイス(1、1’)によって発生される前記同期イベント(38、39)の性質は、前記それぞれのセンサデバイス(1、1’)によって決定される出力値を示し、前記センサデバイスの信号出力ターミナル(SO、SO’)と前記マスターデバイス(2)の信号入力ターミナル(MI)に接続された前記バスの信号ラインとの間には、ダイオード(18、18’)が接続されており、これによって前記センサデバイス(1、1’)によって発生された同期イベント(38、39)は、前記マスターデバイス(2)へ送信され、前記マスターデバイスは、これら同期イベント(38、39)から前記センサデバイスの出力値を抽出するための手段(30、34、35)を備えることを特徴とする光センサシステム。 - 各センサデバイス(1)は、前記バスの個々のセグメント(3)に接続されており、前記セグメント(3)の各々は、バスラインのセグメントと、一端が入力側接続ターミナル(i1〜i4)によって境界が定められ、他端が出力側接続ターミナル(x1〜x4)によって境界が定められた、前記信号デージーチェーンのセグメントとを備え、前記センサ側接続ターミナル(s1〜s4)は、前記センサデバイス(1)の接続ターミナル(SI、SO、GND、UB)に係合し、前記ダイオード(18)は、前記センサデバイスの前記信号出力ターミナル(SO)に係合する前記センサ側接続ターミナル(s4)と前記バスセグメントの前記信号ラインセグメント(i3、x3)との間に接続された、それぞれのセンサデバイス(1)に関連している、請求項1に記載の光センサシステム。
- 前記マスターデバイスは、ユーザーシステムに接続するためのシリアルデータインターフェース、好ましくはIOリンクインターフェースを備え、前記シリアルデータインターフェースにより前記ユーザーシステムから前記センサデバイスへコマンドを送信すると共に、前記センサ出力の値を前記ユーザーシステムに送信するようになっている、請求項1または2に記載の光センサシステム。
- 2つの対向する側面(44、45)を備え、更に前記側面(44、45)がレール(51)の長手方向に対して垂直となるように、前記スカート面(47)のうちの1つにて前記取り付けレール(51)に取り付けられるようになっている、前記側面(44、45)を接続する別の面(46〜49)を備える、全体に立方形の外形をした筺体(4)と、センサ回路とを備え、前記センサ回路は、第1光ファイバー(8)に光を送るための電気光学的送信機(6)と、第2光ファイバー(9)を通して受信した光を検出するための電気光学的受信機(7)と、前記送信機(6)と前記受信機(7)との間の光セクション(8、9、10)の状態を示す出力値を決定するための手段だけでなく、信号入力ターミナル(SI)、信号出力ターミナル(SO)および電源電圧を前記回路に供給するための1つ以上の電源ターミナル(GND、UB)を含む接続ターミナルも備え、前記センサ回路は、この回路の信号入力ターミナル(SI)で発生する同期イベント(36)を検出し、この同期イベント(36)に基づき、前記送信機(6)の光学的アクティビティの時間を定めると共に、前記検出された同期イベント(36)に対して所定のオフセット時間(T)だけ遅延された同期イベント(38)を前記信号出力ターミナル(SO)にて発生させるようになっている、センサシステムのための光センサデバイス(1)において、
前記電源ターミナル(GND、UB)、前記信号入力ターミナル(SI)および前記信号出力ターミナル(SO)は、前記筺体(4)の前記スカート面(49)のうちの1つに配置されたコネクタ(55)の接続ターミナルであることを特徴とする、光センサデバイス(1)。 - 前記センサデバイス(1)によって発生される前記同期イベント(38)の性質は、前記決定された出力値を示すことを特徴とする、請求項4に記載の光センサデバイス。
- 前記同期イベント(36、38)は、電気パルスであり、前記センサデバイス(1)によって発生される前記同期パルス(38)の長さは、前記決定された出力値を示すことを特徴とする、請求項5に記載の光センサデバイス。
- 前記センサ回路は、センサシステムにおけるシステム作動モードと、スタンドアローン作動のためのスタンドアローンモードとを含む、少なくとも2つの別個の作動モードを有し、前記送信機(6)の光学的アクティビティはシステムモードにおける前記検出された同期イベント(36)に基づき、更にスタンドアローンモードにおける内部タイミングユニット(21)によって発生されるタイミングイベントに基づき、タイミング制御されることを特徴とする、請求項4〜6のうちのいずれか1項に記載の光センサデバイス。
- 前記センサ回路は、システムモードにおける前記発生された同期イベント(38)を含む信号およびスタンドアローンモードにおける前記決定された出力値を示すDC信号を前記出力ターミナル(SO)で発生するようになっていることを特徴とする、請求項7に記載の光センサデバイス。
- センサデバイス(1)をセンサシステムの電気バスに接続するためのバスセグメント(3)であって、入力側接続ターミナル(i1〜i4)と出力側接続ターミナル(x1〜x4)とを備え、前記接続ターミナルの各々は、それぞれ他方の側接続ターミナルのうちの1つに別々に関連し、更に前記出力側接続ターミナル(x1〜x4)は、それらの関連する接続ターミナル(i1〜i4)に対応する同一の別のバスセグメント(3’)のうちの入力側接続ターミナル(i1’〜i4’)に係合できるように、各他方の接続ターミナルに対して配置されており、更に前記センサデバイス(1)を前記バスセグメント(3)に接続するためのセンサ側接続ターミナル(s1〜s4)を更に備え、前記バスのラインのセグメントは、相互に関連する入力側および出力側接続ターミナル(i2、x2;i3、x3;i4、x4)の相互に接続されたペアから成り、前記センサデバイス(1)の電源ターミナル(GND、UB)に係合するよう、前記センサ側接続ターミナル(s2、s3)に接続された1つ以上のラインセグメントを備えるバスセグメント(3)において、前記ラインセグメントは、前記バスの信号ラインのセグメント(i3、x3)を更に備え、前記バスの信号デージーチェーンのセグメントは、相互に関連した入力側および出力側接続ターミナル(i1、x1)の別のペアから成り、前者の入力側接続ターミナル(i1)は、前記センサデバイス(1)の信号入力ターミナル(SI)に係合するよう、センサ側接続ターミナル(s1)に接続されており、後者の出力側接続ターミナル(x1)は、前記センサデバイス(1)の信号出力ターミナル(SO)に係合するよう、センサ側接続ターミナル(s4)に接続されていることを特徴とするバスセグメント(3)。
- 前記デージーチェーンセグメントの前記出力側接続ターミナル(x1)と前記バスの前記信号ラインの前記セグメント(i3、x3)との間には、ダイオード(18)が接続されていることを特徴とする、請求項9に記載のバスセグメント。
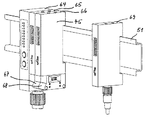
- 2つの対向する側面(57、58)を備え、更にこれら側面を接続する別の面を備えた、全体が立方形の外形をした筺体(56)を更に備え、前記センサ側接続ターミナルは、プラグコネクタ(73)の接触部材(s1〜s4)であり、このプラグコネクタ(73)は、前記側面(57)と(58)との間に配置され、前記別の面(59)のうちの1つに向くと共に、この別の面(59)に設けられた開口部(60)と整合しており、前記開口部を通してこのプラグコネクタは、センサデバイス(1)の相補的なプラグコネクタ(55)と係合するようにアクセス可能となっていることを特徴とする、請求項9または10のうちのいずれか1項に記載のバスセグメント。
- 前記プラグコネクタ(73)に整合するように、結合リング(61)が回転自在に配置されており、この結合リングは側面(57、58)を形成する筺体の壁(71、72)内に設けられたウィンドー(75、76)内で径方向に突出し、よってユーザーがウィンドー(75、76)の領域内で親指と人差し指でつまむことができるようになっており、前記結合リング(61)には前記センサデバイス(1)の前記コネクタの対応する結合手段(78)と回転結合するための結合手段(77)が設けられていることを特徴とする、請求項11記載のバスセグメント。
- 前記入力側接続ターミナルは、前記筺体の側面(57)から突出する雄型プラグ接点(i1〜i4)であり、前記プラグ接点(i1〜i4)のプラグ方向に平行な同じ側面(57)から、この同じプラグ接点の両端を超えて突出しており、同一のこの別のバスセグメント(3’)の前記ガイドピン(62)を収納するような形状の孔(63)が前記対向する側面(58)にある前記ガイドピン(62)と整合するように設けられていることを特徴とする、請求項11または12に記載のバスセグメント。
- 請求項4〜8のうちのいずれか1項に記載のセンサデバイスと、前記1つのセンサデバイスの接続ターミナル(SI、SO、GND、UB)が前記他方のセンサデバイスの対応するセンサ側接続ターミナル(s1〜s4)に係合するよう前記1つのセンサデバイスに接続された、請求項9〜13のうちのいずれか1項に記載のバスセグメントとを含む、センサシステム用センサユニット。
- 前記センサユニット(1)および前記バスセグメント(3)の前記筺体(4、56)は、隣接して対向するスカート面(49、59)を有することを特徴とする、請求項14に記載のセンサユニット。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08405215.8A EP2161549B1 (en) | 2008-09-05 | 2008-09-05 | Optical sensor system, optical sensor device and bus segment for connecting the device to a bus of the system |
| EP08405215.8 | 2008-09-05 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010068520A true JP2010068520A (ja) | 2010-03-25 |
| JP5697859B2 JP5697859B2 (ja) | 2015-04-08 |
Family
ID=40289339
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009204555A Expired - Fee Related JP5697859B2 (ja) | 2008-09-05 | 2009-09-04 | 光センサシステム、光センサデバイスおよび光センサデバイスを光センサシステムのバスに接続するためのバスセグメント |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8391710B2 (ja) |
| EP (1) | EP2161549B1 (ja) |
| JP (1) | JP5697859B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112011101000T5 (de) | 2010-03-24 | 2013-01-03 | Yazaki Corporation | Beleuchtungsstruktur von Innenraumleuchte |
| JP2017130897A (ja) * | 2016-01-22 | 2017-07-27 | オムロン株式会社 | 近接スイッチ |
| US10295377B2 (en) | 2017-03-29 | 2019-05-21 | Tt Electronics Plc | Systems and methods providing synchronization for multiple optical detectors wherein a radiant power delivered to a second light detector from a first light source is at least 25 percent of radiant power delivered to a first light detector from the first light source |
| JP2023525487A (ja) * | 2020-05-07 | 2023-06-16 | ヴィポテック ゲーエムベーハー | 特に多軌道型の秤のためのモジュール形式の測定技術装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014212628B4 (de) * | 2014-06-30 | 2016-04-14 | Phoenix Contact Gmbh & Co. Kg | Sammelfernmeldevorrichtung |
| EP4151958B1 (en) | 2021-09-17 | 2024-08-21 | Melexis Bulgaria EOOD | Sensing system comprising a chain of sensors |
| DE102023135344A1 (de) * | 2023-12-15 | 2025-06-18 | Turck Holding Gmbh | Elektrisches Gerät und Verfahren zum Betreiben eines elektrischen Geräts |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0964712A (ja) * | 1995-06-12 | 1997-03-07 | Keyence Corp | 検出スイッチ親機、検出スイッチ子機および検出スイッチシステム |
| JP2001196127A (ja) * | 1999-10-25 | 2001-07-19 | Omron Corp | センサシステム |
| JP2002260770A (ja) * | 2001-03-05 | 2002-09-13 | Sunx Ltd | センサシステム、検出センサ及び検出センサ用コネクタ |
| JP2004295276A (ja) * | 2003-03-26 | 2004-10-21 | Keyence Corp | 連設型センサシステム、マスタユニット、センサユニット並びにセンサ中継ユニット |
| JP2006156257A (ja) * | 2004-11-30 | 2006-06-15 | Sunx Ltd | センサシステム |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4274252B2 (ja) * | 2007-01-24 | 2009-06-03 | 株式会社デンソー | Pwm出力型センサ回路 |
-
2008
- 2008-09-05 EP EP08405215.8A patent/EP2161549B1/en not_active Not-in-force
-
2009
- 2009-09-03 US US12/553,399 patent/US8391710B2/en not_active Expired - Fee Related
- 2009-09-04 JP JP2009204555A patent/JP5697859B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0964712A (ja) * | 1995-06-12 | 1997-03-07 | Keyence Corp | 検出スイッチ親機、検出スイッチ子機および検出スイッチシステム |
| JP2001196127A (ja) * | 1999-10-25 | 2001-07-19 | Omron Corp | センサシステム |
| JP2002260770A (ja) * | 2001-03-05 | 2002-09-13 | Sunx Ltd | センサシステム、検出センサ及び検出センサ用コネクタ |
| JP2004295276A (ja) * | 2003-03-26 | 2004-10-21 | Keyence Corp | 連設型センサシステム、マスタユニット、センサユニット並びにセンサ中継ユニット |
| JP2006156257A (ja) * | 2004-11-30 | 2006-06-15 | Sunx Ltd | センサシステム |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112011101000T5 (de) | 2010-03-24 | 2013-01-03 | Yazaki Corporation | Beleuchtungsstruktur von Innenraumleuchte |
| JP2017130897A (ja) * | 2016-01-22 | 2017-07-27 | オムロン株式会社 | 近接スイッチ |
| US10295377B2 (en) | 2017-03-29 | 2019-05-21 | Tt Electronics Plc | Systems and methods providing synchronization for multiple optical detectors wherein a radiant power delivered to a second light detector from a first light source is at least 25 percent of radiant power delivered to a first light detector from the first light source |
| TWI686600B (zh) * | 2017-03-29 | 2020-03-01 | 美商Tt電子公司 | 用於檢測物體速度及位置的光學檢測系統、光學感測系統以及在系統內之光學檢測方法 |
| JP2023525487A (ja) * | 2020-05-07 | 2023-06-16 | ヴィポテック ゲーエムベーハー | 特に多軌道型の秤のためのモジュール形式の測定技術装置 |
| JP7450759B2 (ja) | 2020-05-07 | 2024-03-15 | ヴィポテック ゲーエムベーハー | 特に多軌道型の秤のためのモジュール形式の測定技術装置 |
| US12339158B2 (en) | 2020-05-07 | 2025-06-24 | Wipotec Gmbh | Modular metrological device, in particular for a multi-track weighing machine |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100061723A1 (en) | 2010-03-11 |
| EP2161549A1 (en) | 2010-03-10 |
| JP5697859B2 (ja) | 2015-04-08 |
| EP2161549B1 (en) | 2018-11-07 |
| US8391710B2 (en) | 2013-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5697859B2 (ja) | 光センサシステム、光センサデバイスおよび光センサデバイスを光センサシステムのバスに接続するためのバスセグメント | |
| US20100057946A1 (en) | Type a usb receptacle with plug detection | |
| TWI447576B (zh) | 網卡故障提示系統 | |
| US4941115A (en) | Hand-held tester for communications ports of a data processor | |
| US5872512A (en) | Apparatus and method for reducing errors in a battery operated sensing circuit | |
| CN100446147C (zh) | 多光轴光电传感器系统 | |
| EP3849029B1 (en) | Electrical mating systems | |
| JP4292422B2 (ja) | プログラマブル・コントローラ・システム | |
| Novak et al. | Automated testing of electronic control units compatibility in vehicle CAN networks | |
| JP2001209879A (ja) | 組込型センサとの通信のための方法 | |
| JP4386186B2 (ja) | 信号入力装置 | |
| JP2796813B2 (ja) | コネクタ組立体 | |
| JP4808291B1 (ja) | センサヘッド構造 | |
| CN221928657U (zh) | 非对称式连接装置 | |
| CN219676570U (zh) | 扩展模块、图形化编程装置 | |
| CN100372187C (zh) | 具光电侦测的连接装置与其使用方法 | |
| TWI500541B (zh) | Vehicle Diagnostic Interface | |
| CN112905510B (zh) | 主机设备及配件状态识别方法 | |
| Kostka | Sandia Cable Tester: Reference Manual | |
| CN200986663Y (zh) | 可编程控制器系统 | |
| JP2012008028A (ja) | コネクタ半挿検出装置、コネクタ接続警告方法およびコネクタ接続警告プログラム | |
| KR100732830B1 (ko) | 임베디드 시스템의 고속 실시간 모니터링 장치 | |
| JP3818387B2 (ja) | 多光軸光電センサシステム | |
| CN121501573A (zh) | 板卡测试系统、测试方法及计算设备 | |
| JPH0854433A (ja) | ケーブル心線対照器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120830 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130723 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131023 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131028 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131125 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131128 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131224 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140425 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140725 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140730 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140825 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150116 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5697859 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |