JP2010064871A - クレーンの転倒防止装置の制御装置 - Google Patents
クレーンの転倒防止装置の制御装置 Download PDFInfo
- Publication number
- JP2010064871A JP2010064871A JP2008234022A JP2008234022A JP2010064871A JP 2010064871 A JP2010064871 A JP 2010064871A JP 2008234022 A JP2008234022 A JP 2008234022A JP 2008234022 A JP2008234022 A JP 2008234022A JP 2010064871 A JP2010064871 A JP 2010064871A
- Authority
- JP
- Japan
- Prior art keywords
- outriggers
- crane
- ground
- outrigger
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Jib Cranes (AREA)
Abstract
【解決手段】この制御装置は、各アウトリガ5a〜dに設けられた接地検出スイッチ7a〜dの検出信号に基づいてアウトリガ5a〜dの接地の有無を判断し、全てのアウトリガ5a〜dが未接地の状態のときに限って各ロードセル6a〜dのゼロ点補正を実行する。
【選択図】図2
Description
しかし、アウトリガで支持している場合であっても、吊荷や作業半径が過大になると、バランスが崩れてクレーンが転倒するおそれがある。クレーンが転倒しようとするときには、転倒する側とは反対側のアウトリガの接地反力が小さくなる。
ここで、特許文献1に記載の技術では、アウトリガの接地反力を判断する原点となるロードセルのゼロ点を、ロードセルの反力値が予め設定した一定値(例えば同文献での調整基準値(300[N])以下になったときにリセット(ロードセルのゼロ点補正)している。
そこで、本発明は、このような問題点に着目してなされたものであって、ロードセルのゼロ点補正を自動的に実行する場合であっても、そのリセットタイミングの設定を確実に行うことができるクレーンの転倒防止装置の制御装置を提供することを目的としている。
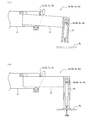
図1は、本発明の第一実施形態に係るクレーンの合計4本のアウトリガのうち、一のアウトリガを説明する図であり、同図(a)はアウトリガが未接地の状態を示し、同図(b)はアウトリガが接地した状態を示している。なお、各アウトリガが同様の構成を有するため、同図では一のアウトリガのみを示し、他のアウトリガについては対応する符号を併記し、個別の図示を省略する。
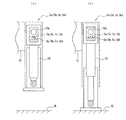
同図に示すように、この制御装置(コントローラ)は、制御部1、予告警報出力部2、転倒警報出力部3、警報部9および電源スイッチ4を備えて構成されている。警報部9は、予告警報出力部2から予告警報信号を受けて予告警報を発するとともに、転倒警報出力部3から転倒警報信号を受けると転倒警報を発する。なお、警報部9の警報には、警音、警報ランプ、ディスプレイへの警報表示、音声による警報メッセッージ等、任意の手段を単独で又は複合して用いることができるが、ここでは警報部9にブザーを用い、予告警報として断続音を、転倒警報として連続音を発するようになっている。
つまり、全てのアウトリガ5a〜dの接地検出スイッチ7a〜dが未接地状態(off)のとき(YES)には、ステップS2に移行して各ロードセル6a〜dのゼロ点補正を実行する(ゼロ点補正手段)。これに対し、接地検出スイッチ7a〜dのいずれかが接地状態(on)のときには、ステップS3に移行する。ステップS3では、全てのアウトリガ5a〜dの接地検出スイッチ7a〜dが接地状態(on)のとき(YES)には、ステップS4に移行し、そうでないときはステップS3で待機する。
この車両搭載型のクレーンによってクレーン作業を行う場合には、オペレータは、車両を作業場所に停車させ、車両のPTOをonとして油圧ポンプの駆動を開始した後、各アウトリガ5a、5b、5c、5dを張出して接地させ、安定を確保してからクレーンを操作する。オペレータが車両のPTOをonにすると、これに連動して電源スイッチ4がonとなるので、クレーンの転倒防止装置の制御装置もクレーンの転倒防止制御を開始する。
また、転倒負荷監視中に、アウトリガ5a〜dの接地検出スイッチ7a〜dが、何れも未接地状態(off)となった場合は(ステップS5での「YES」)、アウトリガ5a〜dの接地が解除されたものと判断されるので、制御部1は、転倒警報出力部3から警報部9への警報信号の送出を中止して警報部9のブザー音を停止させ(ステップS6)、転倒負荷監視を終了する。なお、この状態から、再びアウトリガ5a〜dを張出して接地させると、各ロードセル6a〜dに作用する接地負荷Ra、Rb、Rc、Rdが増加し、アウトリガ5a〜dの接地検出スイッチ7a〜dが何れも接地状態(on)になれば転倒負荷監視を再開する。
さらに、この制御装置は、接地検出スイッチ7a〜dの検出信号に基づいて、全てのアウトリガ5a〜dが未接地の状態のときに限って各ロードセル6a〜dのゼロ点補正を実行するので、ゼロ点補正におけるリセットタイミングの設定を確実に行うことを可能とし、自動によりゼロ点を補正する場合の信頼性を向上させることができる。
例えば、上記実施形態のクレーンの転倒防止装置の制御装置は、接地負荷が危険基準値より小さくなったときに転倒警報を発するよう構成しているが、これに限定されず、接地負荷が危険基準値より小さくなったときに、クレーン転倒側への作業半径が増加する操作を自動的に停止させるよう構成することもできる。
図4に示すように、この変形例は、上記実施形態に対して、接地検出スイッチ7a、7b、7c、7dが、対応する各ロードセル6a〜dの上部に配設されている点のみが異なっている。この変形例での接地検出スイッチ7a〜dは、各接地検出スイッチ7a〜dが押されてから各ロードセル6a〜dに荷重が加わるように設けられている。
そのため、縦シリンダ10が持ち上がった時点で、各アウトリガ5a〜dの接地を検出することができるため、上記実施形態に比べて、インナボックス12が持ち上がる以前に接地の検出が可能である。したがって、ゼロ点のリセットの可否判断を一層精度良く行うことができる。
2 予告警報出力部
3 転倒警報出力部
4 電源スイッチ
5a、5b、5c、5d アウトリガ
6a、6b、6c、6d ロードセル
7a、7b、7c、7d 接地検出スイッチ
8 ベース
9 警報部
10 縦シリンダ
12 インナボックス
Ra、Rb、Rc、Rd 接地負荷
Claims (3)
- 複数個のアウトリガと、該複数個のアウトリガの接地負荷をそれぞれ検出可能に設けられる複数個のロードセルと、前記複数個のアウトリガの接地の有無をそれぞれ検出可能な複数個の接地検出スイッチとを備えるクレーンの転倒防止装置の制御装置であって、
前記複数個のロードセルのゼロ点を補正するゼロ点補正手段を備え、当該ゼロ点補正手段は、前記複数個の接地検出スイッチの検出信号に基づいて前記アウトリガの接地の有無を判断し、全てのアウトリガが未接地の状態のときに限って各ロードセルのゼロ点補正を実行することを特徴とするクレーンの転倒防止装置の制御装置。 - 各接地検出スイッチは、各接地検出スイッチが押されてから対応する各ロードセルに荷重が加わるように、対応する各ロードセルの上部に配設されていることを特徴とする請求項1に記載のクレーンの転倒防止装置の制御装置。
- 各アウトリガは、入れ子式のインナボックスを有して構成されており、各インナボックスは、車両側のベースにスライド移動可能に内嵌されるとともに、左右に格納作動または張出し作動されるようになっており、
各接地検出スイッチは、前記ベース内に、且つ各アウトリガのインナボックス上面に対向する位置に設けられていることを特徴とする請求項1に記載のクレーンの転倒防止装置の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008234022A JP5465855B2 (ja) | 2008-09-11 | 2008-09-11 | クレーンの転倒防止装置の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008234022A JP5465855B2 (ja) | 2008-09-11 | 2008-09-11 | クレーンの転倒防止装置の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010064871A true JP2010064871A (ja) | 2010-03-25 |
| JP5465855B2 JP5465855B2 (ja) | 2014-04-09 |
Family
ID=42190792
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008234022A Active JP5465855B2 (ja) | 2008-09-11 | 2008-09-11 | クレーンの転倒防止装置の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5465855B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105584498A (zh) * | 2015-11-27 | 2016-05-18 | 金鹰重型工程机械有限公司 | 一种铁路轨行车辆液压防倾覆控制装置 |
| JP2024132940A (ja) * | 2023-03-15 | 2024-10-01 | マニトワック クレーン グループ フランス エスエーエス | 固定装置を備えた移動式クレーンのアウトリガ |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5835452U (ja) * | 1981-09-02 | 1983-03-08 | 株式会社多田野鉄工所 | クレ−ン装置の安定限界警報装置 |
| JP2002104777A (ja) * | 2000-09-28 | 2002-04-10 | Furukawa Co Ltd | クレーンの転倒警報装置の制御装置 |
| JP2006168925A (ja) * | 2004-12-16 | 2006-06-29 | Aichi Corp | 作業車の安全制御装置 |
-
2008
- 2008-09-11 JP JP2008234022A patent/JP5465855B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5835452U (ja) * | 1981-09-02 | 1983-03-08 | 株式会社多田野鉄工所 | クレ−ン装置の安定限界警報装置 |
| JP2002104777A (ja) * | 2000-09-28 | 2002-04-10 | Furukawa Co Ltd | クレーンの転倒警報装置の制御装置 |
| JP2006168925A (ja) * | 2004-12-16 | 2006-06-29 | Aichi Corp | 作業車の安全制御装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105584498A (zh) * | 2015-11-27 | 2016-05-18 | 金鹰重型工程机械有限公司 | 一种铁路轨行车辆液压防倾覆控制装置 |
| JP2024132940A (ja) * | 2023-03-15 | 2024-10-01 | マニトワック クレーン グループ フランス エスエーエス | 固定装置を備えた移動式クレーンのアウトリガ |
| JP7700301B2 (ja) | 2023-03-15 | 2025-06-30 | マニトワック クレーン グループ フランス エスエーエス | 固定装置を備えた移動式クレーンのアウトリガ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5465855B2 (ja) | 2014-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2329237B1 (en) | Load monitoring system | |
| US8950605B2 (en) | Monitoring and alarm device for construction machinery | |
| CN205087891U (zh) | 一种基于载荷位置检测的叉车叉具保护系统 | |
| US10336588B2 (en) | Mobile crane | |
| US10919739B2 (en) | Overload preventing device | |
| EP2765028A3 (en) | System and method for preventing power head rollover during a dump operation by monitoring front struts | |
| JP5519171B2 (ja) | クレーン衝突防止装置 | |
| JP6528429B2 (ja) | 歯止め安全装置 | |
| JP5465855B2 (ja) | クレーンの転倒防止装置の制御装置 | |
| CN111746502A (zh) | 救援抢险车辆和防倾翻保护方法、计算机可读存储介质 | |
| JP4194820B2 (ja) | 車両搭載型クレーンの安全装置 | |
| JP5136633B2 (ja) | クレーン | |
| CN104828722A (zh) | 起重机及其防倾翻设备和防倾翻方法 | |
| CN103086285A (zh) | 防倾翻装置、工程机械及防倾翻的方法 | |
| CN202322096U (zh) | 起重机桅杆收起装置和履带起重机 | |
| KR101512129B1 (ko) | 관절식 유압크레인 전술 트럭의 안전 주행장치 | |
| JP2009249138A (ja) | トラッククレーン | |
| JP3970593B2 (ja) | クレーンの転倒防止装置の制御装置 | |
| JP2009126652A (ja) | トラック搭載型クレーンの安全装置 | |
| JP4196943B2 (ja) | クレーンの安全装置 | |
| JPH11100193A5 (ja) | ||
| KR20110067809A (ko) | 지게차 오실레이팅 각도에 따른 주행속도 제어방법 | |
| KR200394583Y1 (ko) | 차량의 전복 방지 장치 | |
| JP3401468B2 (ja) | 移動式クレーンの安全装置 | |
| JP2005280952A (ja) | 車両搭載用クレーンのブーム自動格納装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20110705 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130430 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130626 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140123 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5465855 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |