JP2010054352A - 渦電流探傷方法、渦電流探傷プローブ、及び渦電流探傷装置 - Google Patents
渦電流探傷方法、渦電流探傷プローブ、及び渦電流探傷装置 Download PDFInfo
- Publication number
- JP2010054352A JP2010054352A JP2008219808A JP2008219808A JP2010054352A JP 2010054352 A JP2010054352 A JP 2010054352A JP 2008219808 A JP2008219808 A JP 2008219808A JP 2008219808 A JP2008219808 A JP 2008219808A JP 2010054352 A JP2010054352 A JP 2010054352A
- Authority
- JP
- Japan
- Prior art keywords
- eddy current
- friction stir
- current flaw
- flaw detection
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Investigating Or Analyzing Materials By The Use Of Magnetic Means (AREA)
Abstract
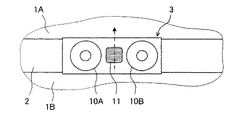
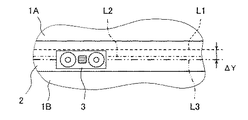
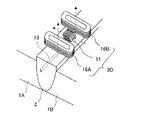
【解決手段】渦電流探傷プローブ3を用いて被検体の摩擦撹拌接合部2を検査する渦電流探傷方法であって、渦電流探傷プローブ3は、互いに逆向きの電流が流れる対の励磁コイル10A,10Bと、これら励磁コイル10A,10Bの間に配置された検出コイル11とを有し、励磁コイル10A,10bは、コイル軸方向が被検体の検査面に対し略垂直となるように、且つ互いに摩擦撹拌接合部2の接合線長さ方向に離間するように配置し、検出コイル11は、コイル軸方向が被検体の検査面に対し略平行となるように且つ摩擦撹拌接合部2の接合線長さ方向に対し略垂直となるように配置する。
【選択図】図4
Description
2 摩擦撹拌接合部
3,3A〜3D 渦電流探傷プローブ
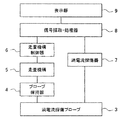
4 プローブ保持器
5 走査機構
6 走査機構制御器
7 渦電流探傷器
8 信号・採取処理器
9 表示器
10A〜10F 励磁コイル
11,11A〜11D 検出コイル
12,12A〜12D 表面キズ
13 内部キズ
16A,16B 励磁コイル
Claims (4)
- 渦電流探傷プローブを用いて被検体の摩擦撹拌接合部を検査する渦電流探傷方法であって、
前記渦電流探傷プローブは、互いに逆向きの電流が流れる対の励磁コイルと、前記対の励磁コイルの間に配置された検出コイルとを有し、
前記対の励磁コイルは、コイル軸方向が前記被検体の検査面に対し略垂直となるように、且つ互いに前記摩擦撹拌接合部の接合線長さ方向に離間するように配置し、
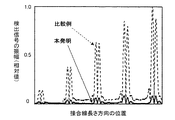
前記検出コイルは、コイル軸方向が前記被検体の検査面に対し略平行となるように且つ前記摩擦撹拌接合部の接合線長さ方向に対し略垂直となるように配置することを特徴とする渦電流探傷方法。 - 請求項1記載の渦電流探傷方法において、前記渦電流探傷プローブは、前記摩擦撹拌接合部の内部キズの発生が予想される接合線幅方向位置と前記検出コイルの軸方向中心位置とを一致させる場合より検出信号が大きくなるように、前記摩擦撹拌接合部の内部キズの発生が予想される接合線幅方向位置と前記検出コイルの軸方向中心位置とを予め設定された所定の距離だけずらすように配置した状態で、前記摩擦撹拌接合部の接合線長さ方向に走査することを特徴とする渦電流探傷方法。
- 被検体の摩擦撹拌接合部を検査する渦電流探傷プローブであって、
コイル軸方向が前記被検体の検査面に対し略垂直となるように、且つ互いに前記摩擦撹拌接合部の接合線長さ方向に離間するように配置され、互いに逆向きの電流が流れる対の励磁コイルと、コイル軸方向が前記被検体の検査面に対し略平行となるように且つ前記摩擦撹拌接合部の接合線長さ方向に対し略垂直となるように、前記対の励磁コイルの間に配置される検出コイルとを有することを特徴とする渦電流探傷プローブ。 - 被検体の摩擦撹拌接合部を検査する渦電流探傷装置であって、
コイル軸方向が前記被検体の検査面に対し略垂直となるように、且つ互いに前記摩擦撹拌接合部の接合線長さ方向に離間するように配置され、互いに逆向きの電流が流れる対の励磁コイル、及びコイル軸方向が前記被検体の検査面に対し略平行となるように且つ前記摩擦撹拌接合部の接合線長さ方向に対し略垂直となるように、前記対の励磁コイルの間に配置される検出コイルを有する渦電流探傷プローブと、
前記摩擦撹拌接合部の接合条件に基づき、前記摩擦撹拌接合部の内部キズの発生が予想される接合線幅方向位置を演算するキズ予想位置演算手段と、
前記摩擦撹拌接合部の内部キズの発生が予想される接合線幅方向位置と前記検出コイルの軸方向中心位置とを一致させる場合より検出信号が大きくなるように、前記摩擦撹拌接合部の内部キズの発生が予想される接合線幅方向位置と前記検出コイルの軸方向中心位置とを予め設定された所定の距離だけずらすような前記渦電流探傷プローブの設定位置を演算するプローブ設定位置演算手段と、
前記プローブ設定位置演算手段の演算結果に基づき前記摩擦撹拌接合部の接合線幅方向における前記渦電流探傷プローブの位置を固定しつつ、前記渦電流プローブを前記摩擦撹拌接合部の接合線長さ方向に走査する走査機構とを備えたことを特徴とする渦電流探傷装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008219808A JP5173680B2 (ja) | 2008-08-28 | 2008-08-28 | 渦電流探傷方法及び渦電流探傷装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008219808A JP5173680B2 (ja) | 2008-08-28 | 2008-08-28 | 渦電流探傷方法及び渦電流探傷装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010054352A true JP2010054352A (ja) | 2010-03-11 |
| JP5173680B2 JP5173680B2 (ja) | 2013-04-03 |
Family
ID=42070442
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008219808A Expired - Fee Related JP5173680B2 (ja) | 2008-08-28 | 2008-08-28 | 渦電流探傷方法及び渦電流探傷装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5173680B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013160579A (ja) * | 2012-02-03 | 2013-08-19 | Hitachi Ltd | 渦電流探傷プローブ |
| JP2014066688A (ja) * | 2012-09-27 | 2014-04-17 | Hosei Univ | 渦流探傷プローブ、渦流探傷装置 |
| US10578584B2 (en) | 2016-10-05 | 2020-03-03 | DAINICHI Machine and Engineering Co., Ltd. | Calibration device for non-destructive inspection/measurement system and non-destructive inspection/measurement method |
| JP2022112065A (ja) * | 2021-01-21 | 2022-08-02 | 株式会社Ihi検査計測 | 渦電流探傷プローブと渦電流探傷方法 |
| WO2025027359A1 (en) * | 2023-08-03 | 2025-02-06 | Liburdi Engineering Limited | In-process weld inspection |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102816445B1 (ko) * | 2020-12-23 | 2025-06-09 | 주식회사 엘지화학 | 와전류를 이용한 전지 셀의 균열 검사 장치 및 방법 |
| KR102900762B1 (ko) * | 2020-12-30 | 2025-12-16 | 주식회사 엘지화학 | 와전류 센서를 이용한 전지 셀의 균열 검사 시스템 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000111530A (ja) * | 1998-10-02 | 2000-04-21 | Technological Res Assoc Of Mega-Float | 溶接部亀裂探傷方法および装置 |
| JP2004136305A (ja) * | 2002-10-16 | 2004-05-13 | Mitsubishi Heavy Ind Ltd | 摩擦攪拌接合方法とその装置 |
| JP2005164442A (ja) * | 2003-12-03 | 2005-06-23 | Marktec Corp | 探傷方法 |
| JP2007248169A (ja) * | 2006-03-15 | 2007-09-27 | Marktec Corp | 渦電流探傷プローブ |
| JP2007263946A (ja) * | 2006-03-03 | 2007-10-11 | Hitachi Ltd | 渦電流探傷センサ及び渦電流探傷方法 |
| JP2008032570A (ja) * | 2006-07-28 | 2008-02-14 | Toyota Motor Corp | 検査装置および検査方法 |
-
2008
- 2008-08-28 JP JP2008219808A patent/JP5173680B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000111530A (ja) * | 1998-10-02 | 2000-04-21 | Technological Res Assoc Of Mega-Float | 溶接部亀裂探傷方法および装置 |
| JP2004136305A (ja) * | 2002-10-16 | 2004-05-13 | Mitsubishi Heavy Ind Ltd | 摩擦攪拌接合方法とその装置 |
| JP2005164442A (ja) * | 2003-12-03 | 2005-06-23 | Marktec Corp | 探傷方法 |
| JP2007263946A (ja) * | 2006-03-03 | 2007-10-11 | Hitachi Ltd | 渦電流探傷センサ及び渦電流探傷方法 |
| JP2007248169A (ja) * | 2006-03-15 | 2007-09-27 | Marktec Corp | 渦電流探傷プローブ |
| JP2008032570A (ja) * | 2006-07-28 | 2008-02-14 | Toyota Motor Corp | 検査装置および検査方法 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013160579A (ja) * | 2012-02-03 | 2013-08-19 | Hitachi Ltd | 渦電流探傷プローブ |
| JP2014066688A (ja) * | 2012-09-27 | 2014-04-17 | Hosei Univ | 渦流探傷プローブ、渦流探傷装置 |
| US10578584B2 (en) | 2016-10-05 | 2020-03-03 | DAINICHI Machine and Engineering Co., Ltd. | Calibration device for non-destructive inspection/measurement system and non-destructive inspection/measurement method |
| JP2022112065A (ja) * | 2021-01-21 | 2022-08-02 | 株式会社Ihi検査計測 | 渦電流探傷プローブと渦電流探傷方法 |
| JP7434194B2 (ja) | 2021-01-21 | 2024-02-20 | 株式会社Ihi検査計測 | 渦電流探傷プローブと渦電流探傷方法 |
| WO2025027359A1 (en) * | 2023-08-03 | 2025-02-06 | Liburdi Engineering Limited | In-process weld inspection |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5173680B2 (ja) | 2013-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5173680B2 (ja) | 渦電流探傷方法及び渦電流探傷装置 | |
| JP3572460B2 (ja) | 渦流探傷用プローブ | |
| JP2009085894A (ja) | 溶接部欠陥検出方法及び装置 | |
| US20160178581A1 (en) | System for evaluating weld quality using eddy currents | |
| JP3276295B2 (ja) | 渦電流探傷装置 | |
| JP4998821B2 (ja) | 渦流検査方法及び該渦流検査方法を実施するための渦流検査装置 | |
| JPH02147950A (ja) | 平面探傷用交流漏洩磁束探傷装置 | |
| JP4756409B1 (ja) | 交番磁場を利用した非破壊検査装置および非破壊検査方法 | |
| JP4766472B1 (ja) | 非破壊検査装置及び非破壊検査方法 | |
| JP2008032575A (ja) | 渦電流測定用プローブ及びそれを用いた探傷装置 | |
| JP2006177952A (ja) | 渦電流プローブ、検査システム及び検査方法 | |
| JP2018124154A (ja) | 鋼橋溶接止端部の疲労き裂に対する渦流探傷結果のc−スコープ画像化システム | |
| JP5893889B2 (ja) | ガイド波のlモード・tモード併用検査方法 | |
| JP3979606B2 (ja) | 渦電流探傷用プローブとそのプローブを用いた渦電流探傷装置 | |
| JP2004205212A (ja) | 磁性材料の渦電流探傷プローブと渦電流探傷装置 | |
| JP4619092B2 (ja) | レーザ溶接継手の検査方法及び検査装置 | |
| JP2004251839A (ja) | 管内表面傷検査装置 | |
| JP2005164516A (ja) | 欠陥検知方法 | |
| KR101988887B1 (ko) | 자기 센서 배열을 이용한 리사주선도 도시 장치 | |
| JP2002214202A (ja) | 渦流探傷用プローブ | |
| JP2005164442A (ja) | 探傷方法 | |
| JP3981965B2 (ja) | 渦電流探傷用プローブとそのプローブを用いた渦電流探傷装置 | |
| CN103115958B (zh) | 一种异种钢闪光焊焊缝缺陷的检测方法及装置 | |
| JP2012145394A (ja) | スポット溶接の検査装置 | |
| JP4614219B2 (ja) | レーザ溶接継手の検査方法及び検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120515 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120713 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5173680 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |