JP2010049681A - 車両回転角度記録方法および車両回転角度記録装置 - Google Patents
車両回転角度記録方法および車両回転角度記録装置 Download PDFInfo
- Publication number
- JP2010049681A JP2010049681A JP2009167305A JP2009167305A JP2010049681A JP 2010049681 A JP2010049681 A JP 2010049681A JP 2009167305 A JP2009167305 A JP 2009167305A JP 2009167305 A JP2009167305 A JP 2009167305A JP 2010049681 A JP2010049681 A JP 2010049681A
- Authority
- JP
- Japan
- Prior art keywords
- rotation angle
- recording
- vehicle
- unit time
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 31
- 230000001133 acceleration Effects 0.000 abstract description 30
- 238000005259 measurement Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 230000010354 integration Effects 0.000 description 5
- 238000005070 sampling Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 239000002699 waste material Substances 0.000 description 3
- 230000006399 behavior Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0841—Registering performance data
- G07C5/085—Registering performance data using electronic data carriers
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Recording Measured Values (AREA)
- Time Recorders, Dirve Recorders, Access Control (AREA)
- Traffic Control Systems (AREA)
Abstract
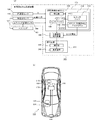
【解決手段】本発明にかかる車両回転角度記録装置100は、車両110の角速度ωを測定する角速度センサ120と、測定した角速度ωを所定の単位時間△tにわたって積分して単位時間△tの回転角度△αを求める積分器130と、単位時間△tの回転角度△αを格納するリングバッファ140と、車両110に事故が発生したことを検知する加速度センサ150と、加速度センサ150によって事故が検知されると、事故の前後の所定の記録時間Tにわたる、リングバッファ140に格納された単位時間△t毎の回転角度△αM・・△αM+N−1を記録する不揮発性記録装置160と、を含むことを特徴とする。
【選択図】図1
Description
図1は、本発明の第1の実施形態である車両回転角度記録装置を例示する図である。図1(a)は車両回転角度記録装置100のブロック図であり、図1(b)は図1(a)の各要素の車両110内での配置を例示する配置図である。
図2は図1のリングバッファを例示する概念図である。図2(a)に例示するように、リングバッファ140は、単位時間△t毎の回転角度△αM・・△αM+N−1を、記録時間Tの間だけ記録可能である。本実施形態では、N=20個の回転角度△αM〜△αM+19がリングバッファ140に記録可能である。
図3は、第1の実施形態である車両回転角度記録装置を用いた場合の車両回転角度記録方法を例示するフローチャートである。まず、図1の車両回転角度記録装置100の角速度センサ120が車両の角速度ωを測定する(ステップS300)。この角速度ωの測定は絶えず行われていて、本実施形態では、一定のサンプリング間隔ds=0.02秒毎に行われる。
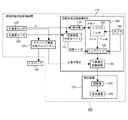
図7は、本発明の第2の実施形態である車両回転角度記録装置500を例示するブロック図である。第2の実施形態の動作の流れは、第1の実施形態の流れを例示する図3のフローチャートと同様である。以下、第2の実施形態について、第1の実施形態(図1(a))と異なる点のみ説明する。
110 …車両
120 …角速度センサ
130 …積分器
140 …リングバッファ
142 …書込ポインタ
144 …読取ポインタ
150 …加速度センサ
152 …作動信号
160 …不揮発性記録装置
170 …回転角度記録ECU
180 …エアバッグ
190 …タイマ
200 …メモリ
202 …レジスタ
210 …読出装置
220 …積算器
230 …エアバッグ展開センサ
240 …表示装置
Claims (8)
- 車両の角速度を測定し、
前記測定した角速度を所定の単位時間にわたって積分して該単位時間の回転角度を求め、
前記単位時間の回転角度をバッファに格納し、
前記車両に事故が発生したことを検知すると、該事故の前後の所定の記録時間にわたる、前記バッファに格納された単位時間毎の回転角度を記録装置に記録することを特徴とする車両回転角度記録方法。 - 前記記録装置に記録した単位時間毎の回転角度を読み出し、
前記読み出した単位時間毎の回転角度をさらに積算して、前記記録時間中の任意の時点までの回転角度を求めることを特徴とする請求項1に記載の車両回転角度記録方法。 - 前記車両のエアバッグが展開したか否かをさらに検知し、
前記エアバッグが展開した場合は、前記単位時間毎の回転角度を記録した記録装置への上書きを禁止することを特徴とする請求項1または2に記載の車両回転角度記録方法。 - 車両の角速度を測定する角速度センサと、
前記測定した角速度を所定の単位時間にわたって積分して該単位時間の回転角度を求める積分器と、
前記単位時間の回転角度を格納するバッファと、
前記車両に事故が発生したことを検知する事故センサと、
前記事故センサによって事故が検知されると、該事故の前後の所定の記録時間にわたる、前記バッファに格納された単位時間毎の回転角度を記録する記録装置と、
を含むことを特徴とする車両回転角度記録装置。 - 前記記録装置に記録した単位時間毎の回転角度を読み出す読出装置と、
前記読み出した単位時間毎の回転角度をさらに積算して、前記記録時間中の任意の時点までの回転角度を求める積算器と、
をさらに含むことを特徴とする請求項4に記載の車両回転角度記録装置。 - 前記バッファは、前記単位時間毎の回転角度を、前記記録時間分だけ記録可能な、リングバッファであることを特徴とする請求項4または5に記載の車両回転角度記録装置。
- 前記車両のエアバッグが展開したか否かを検知するエアバッグ展開センサをさらに含み、
前記エアバッグ展開センサが前記エアバッグの展開を検知した場合は、前記単位時間毎の回転角度を記録した記録装置への上書きが禁止されることを特徴とする請求項4から6のいずれか1項に記載の車両回転角度記録装置。 - 前記記録装置が用意する、前記単位時間毎の回転角度の記録可能領域は、前記角速度センサが出力可能な最大または最小の角速度に基づいて定まる、単位時間あたりの最大回転角度または最小回転角度の分だけ、時間軸に沿って段階的に拡大することを特徴とする請求項4から7のいずれか1項に記載の車両回転角度記録装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009167305A JP4594430B2 (ja) | 2008-07-24 | 2009-07-15 | 車両回転角度記録方法および車両回転角度記録装置 |
| US12/508,919 US7933697B2 (en) | 2008-07-24 | 2009-07-24 | Method and apparatus for recording the rotation angle of a vehicle |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008191332 | 2008-07-24 | ||
| JP2009167305A JP4594430B2 (ja) | 2008-07-24 | 2009-07-15 | 車両回転角度記録方法および車両回転角度記録装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010049681A true JP2010049681A (ja) | 2010-03-04 |
| JP4594430B2 JP4594430B2 (ja) | 2010-12-08 |
Family
ID=41569388
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009167305A Expired - Fee Related JP4594430B2 (ja) | 2008-07-24 | 2009-07-15 | 車両回転角度記録方法および車両回転角度記録装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7933697B2 (ja) |
| JP (1) | JP4594430B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012140053A (ja) * | 2010-12-28 | 2012-07-26 | Denso Corp | 車両の挙動データ記憶制御システム、電子制御装置、データ記憶装置 |
| JP6437166B1 (ja) * | 2018-03-28 | 2018-12-12 | クレオ株式会社 | 衝突可視化装置、およびプログラム |
| JP2019175420A (ja) * | 2018-11-12 | 2019-10-10 | クレオ株式会社 | 衝突可視化装置、およびプログラム |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017201804A1 (de) * | 2017-02-06 | 2018-08-09 | Robert Bosch Gmbh | Verfahren zum Erfassen von Daten, Verfahren zum Aktualisieren eines Szenarienkatalogs, Vorrichtung, Computerprogramm und maschinenlesbares Speichermedium |
| US12072818B2 (en) | 2022-04-28 | 2024-08-27 | Infineon Technologies Ag | Systems and methods for concurrent logging and event capture |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0954889A (ja) * | 1995-08-11 | 1997-02-25 | Nippon Enkaku Seigyo Kk | 交通事故再現システム及びデータ再生装置 |
| JP2002267500A (ja) * | 2001-01-05 | 2002-09-18 | Calsonic Kansei Corp | 衝突事故記録装置、衝突事故状態予測方法及び記録媒体 |
| JP2003072600A (ja) * | 2001-09-04 | 2003-03-12 | Tamagawa Seiki Co Ltd | 車両の挙動情報記録方法及び装置 |
| JP2006151006A (ja) * | 2004-11-25 | 2006-06-15 | Yamaha Corp | ドライブレコーダ装置 |
| JP2007045221A (ja) * | 2005-08-08 | 2007-02-22 | Calsonic Kansei Corp | 車両用データ記録装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6898492B2 (en) * | 2000-03-15 | 2005-05-24 | De Leon Hilary Laing | Self-contained flight data recorder with wireless data retrieval |
| JP2007004522A (ja) | 2005-06-24 | 2007-01-11 | Renesas Technology Corp | 記憶装置 |
-
2009
- 2009-07-15 JP JP2009167305A patent/JP4594430B2/ja not_active Expired - Fee Related
- 2009-07-24 US US12/508,919 patent/US7933697B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0954889A (ja) * | 1995-08-11 | 1997-02-25 | Nippon Enkaku Seigyo Kk | 交通事故再現システム及びデータ再生装置 |
| JP2002267500A (ja) * | 2001-01-05 | 2002-09-18 | Calsonic Kansei Corp | 衝突事故記録装置、衝突事故状態予測方法及び記録媒体 |
| JP2003072600A (ja) * | 2001-09-04 | 2003-03-12 | Tamagawa Seiki Co Ltd | 車両の挙動情報記録方法及び装置 |
| JP2006151006A (ja) * | 2004-11-25 | 2006-06-15 | Yamaha Corp | ドライブレコーダ装置 |
| JP2007045221A (ja) * | 2005-08-08 | 2007-02-22 | Calsonic Kansei Corp | 車両用データ記録装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012140053A (ja) * | 2010-12-28 | 2012-07-26 | Denso Corp | 車両の挙動データ記憶制御システム、電子制御装置、データ記憶装置 |
| JP6437166B1 (ja) * | 2018-03-28 | 2018-12-12 | クレオ株式会社 | 衝突可視化装置、およびプログラム |
| WO2019186782A1 (ja) * | 2018-03-28 | 2019-10-03 | クレオ株式会社 | 衝突可視化装置、およびプログラム |
| CN111867891A (zh) * | 2018-03-28 | 2020-10-30 | 克里奥株式会社 | 一种冲突可视化装置以及程序 |
| US11040728B2 (en) | 2018-03-28 | 2021-06-22 | Creo Co., Ltd. | Collision visualization device for visualizing driving state of vehicle and recording medium |
| US11608077B2 (en) | 2018-03-28 | 2023-03-21 | Creo Co., Ltd. | Collision visualization device for visualizing driving state of vehicle and recording medium |
| JP2019175420A (ja) * | 2018-11-12 | 2019-10-10 | クレオ株式会社 | 衝突可視化装置、およびプログラム |
| JP7064767B2 (ja) | 2018-11-12 | 2022-05-11 | クレオ株式会社 | 衝突可視化装置、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4594430B2 (ja) | 2010-12-08 |
| US7933697B2 (en) | 2011-04-26 |
| US20100023208A1 (en) | 2010-01-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4594430B2 (ja) | 車両回転角度記録方法および車両回転角度記録装置 | |
| RU2402440C1 (ru) | Система записи информации о транспортном средстве | |
| JP5344339B2 (ja) | ドライブレコーダ | |
| JP5817745B2 (ja) | 車両事故歴記録装置 | |
| JP2562556B2 (ja) | 事故評価に適した測定値表示部を有する自動車用走行記録装置 | |
| US8164847B2 (en) | Fall detection device, magnetic disk device, and portable electronic apparatus | |
| JP6683683B2 (ja) | 自動車用計算機 | |
| US20100152949A1 (en) | Vehicle event recording system and method | |
| US20090024274A1 (en) | Recording device and recording method | |
| EP1615178A3 (de) | Mobile Kommunikationseinheit, Halterung für eine mobile Kommunikationseinheit und Ereignisdatenschreibersystem für Fahrzeuge | |
| GB1566309A (en) | Error detection checking circuitry | |
| US20180297545A1 (en) | Collision data storage device and collision data storage method | |
| JP5187387B2 (ja) | 車両データ記憶装置、コントローラ及び車両データ記録システム | |
| CN103093514B (zh) | 用于装配有乘坐者保护装置的交通工具的数据记录设备 | |
| JP2009003843A (ja) | フラッシュromのデータ管理装置及びフラッシュromのデータ管理方法 | |
| JP2006292690A (ja) | 落下判定装置及び落下判定方法 | |
| JP2023051997A (ja) | 車載映像記録装置及びその制御方法 | |
| CN100375897C (zh) | 加速度检测装置和使用该装置的乘客保护系统 | |
| JP2006227110A5 (ja) | ||
| CN102099859A (zh) | 下落检测装置、磁盘装置、以及便携式电子设备 | |
| RU2009117385A (ru) | Датчик аварии и способ обработки по меньшей мере одного измерительного сигнала | |
| JP4904760B2 (ja) | データ処理装置 | |
| JP2009063455A (ja) | 車両故障検知装置 | |
| JP6112345B2 (ja) | 車両の盗難防止装置 | |
| EP1780708A3 (en) | Electronic apparatus and electronic apparatus control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100405 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100831 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100916 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4594430 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |