JP2010048716A - レーダ干渉回避装置、及びレーダ干渉回避方法 - Google Patents
レーダ干渉回避装置、及びレーダ干渉回避方法 Download PDFInfo
- Publication number
- JP2010048716A JP2010048716A JP2008214436A JP2008214436A JP2010048716A JP 2010048716 A JP2010048716 A JP 2010048716A JP 2008214436 A JP2008214436 A JP 2008214436A JP 2008214436 A JP2008214436 A JP 2008214436A JP 2010048716 A JP2010048716 A JP 2010048716A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- radar
- information
- instruction
- frequency band
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Traffic Control Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
【解決手段】他車両と無線通信することによって当該他車両に搭載されたレーダから放射される電磁波が到達する領域、及び周波数帯域などの情報と、自車両に搭載されたレーダの電磁波の到達する領域、及び周波数帯域などの情報に基づき、自車両に搭載されたレーダと他車両に搭載されたレーダとが干渉する可能性があると判断したときに、互いのレーダから放射される電磁波を干渉しない状態に変更する。
【選択図】図1
Description
第1の発明は、放射した電磁波と受信した反射波とに基づき、対象物を測定するレーダ手段と、他車両と無線通信をすることによって、当該他車両のレーダ手段の情報を取得する通信手段と、通信手段によって取得された他車両のレーダ手段の情報、及び自車両のレーダ手段の情報を示すレーダ情報に基づき、自車両のレーダ手段と他車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する判断手段と、判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及び他車両のレーダ手段の少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示手段とを備える。
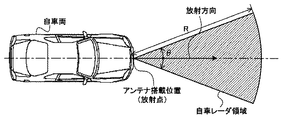
図1は、本発明の第1の実施形態に係るレーダ干渉回避システム1の機能構成を示す機能ブロック図である。レーダ干渉回避システム1は、自車レーダ干渉回避装置10と他車レーダ干渉回避装置11とからなる。まず、自車レーダ干渉回避装置10の機能構成について説明する。自車レーダ干渉回避装置10は、自車両に搭載され、自車位置測定部101と、自車通信部102と、自車レーダ103と、自車処理部104とを備える。
上述の第1の実施形態では、指示処理部として処理をする自車処理部104が、干渉する可能性のある他車レーダ113を特定するときに、まず、自車レーダ103の自車レーダ領域T1に重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定するものとした。しかしながら、本発明に係る干渉回避システムは、予め定められた期間(以下、推定期間と称する)が経過したときの自車レーダ領域、及び他車レーダ領域をそれぞれ推定して、推定した自車レーダ領域(以下、推定自車レーダ領域と称する)に重複する、推定した他車レーダ領域(以下、推定他車レーダ領域と称する)に電磁波を放射する他車レーダを特定してもよい。
第1の実施形態では、指示処理部として処理をする自車処理部104は、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定したとき、特定した他車レーダ113の中から、現在使用中の自車周波数帯域と重複する他車周波数帯域を現在使用中の他車レーダ113を特定する処理を、全ての他車レーダ113について同時にするものとした。しかしながら、指示処理部として処理をする自車処理部104は、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車レーダを特定したとき、レーダ情報Shによってそれぞれ示される自車位置情報Ji1と他車位置情報Ji2とに基づき、特定した他車レーダ113の内、自車両C1に近い他車両の他車レーダ113から順番に、現在使用中の自車周波数帯域と重複する他車周波数帯域を現在使用しているか否かを判断して、特定してもよい。
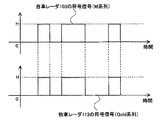
本発明において、自車レーダ103、及び他車レーダ113として用いることのできるレーダは、放射する電磁波に、予め定められた系列の符号信号を重畳するレーダであってもよい。予め定められた系列の符号信号を重畳した電磁波を放射することにより、受信した反射波と放射した電磁波との相関に基づいて、受信した反射波が、自身から放射された電磁波の反射波であるか、他のレーダから放射された電磁波を受信したものであるかを判断することができる。自車レーダ103、及び他車レーダ113が電磁波に重畳する符号信号の系列としては、M系列、及びGold系列などが一例として挙げられる。このように、放射する電磁波に予め定められた系列の符号信号を重畳するレーダは、既に実用化されている。
2 干渉回避システム
10 自車レーダ干渉回避装置
20 他車レーダ干渉回避装置
101 自車位置測定部
102 自車通信部
103 自車レーダ
104 自車処理部
111 他車位置測定部
112 他車通信部
113 他車レーダ
114 他車処理部
Claims (16)
- 放射した電磁波と受信した反射波とに基づき、対象物を測定するレーダ手段と、
他車両と無線通信をすることによって、当該他車両のレーダ手段の情報を取得する通信手段と、
前記通信手段によって取得された他車両のレーダ手段の情報、及び自車両のレーダ手段の情報を示すレーダ情報に基づき、自車両のレーダ手段と他車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する判断手段と、
前記判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及び他車両のレーダ手段の少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示手段とを備える、レーダ干渉回避装置。 - 前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を、前記レーダ情報に基づき特定する領域重複レーダ特定手段を含み、
前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段と前記自車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する、請求項1に記載のレーダ干渉回避装置。 - 前記通信手段は、前記他車両のレーダ手段が電磁波、及び反射波をそれぞれ放射、及び受信するときの周波数帯域を他車周波数帯域として示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段が電磁波を放射するとき、及び反射波を受信するときのそれぞれの周波数帯域を示す自車周波数帯域を前記自車両のレーダ手段の情報に基づき認識する自車周波数認識手段と、
前記領域重複レーダ特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車周波数認識手段によって認識された前記自車周波数帯域と重複する前記他車周波数帯域の前記他車両のレーダ手段を、前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき判断する重複周波数判断手段とを含み、
前記重複周波数判断手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段と前記他車両のレーダ手段とが干渉する可能性があると判断し、
前記指示手段は、前記判断手段によって干渉する可能性があると判断されたとき、前記自車両のレーダ手段、及び前記重複周波数特定手段によって特定された前記他車両のレーダ手段の少なくとも一方に対して、前記自車周波数帯域と前記他車周波数帯域とが互いに重複しないように変更する指示を与える、請求項2に記載のレーダ干渉回避装置。 - 前記通信手段は、前記他車両のレーダ手段が前記他車周波数帯域を変更することが可能であるか否かを示す情報をさらに取得し、
前記指示手段は、
前記判断手段によって干渉する可能性があると判断されたとき、前記他車周波数帯域を変更することが不可能な前記他車両のレーダ手段を、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定する第1の指示対象特定手段を含み、
前記第1の指示対象特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段に対して、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の前記他車周波数帯域と重複しない前記自車周波数帯域に変更する指示を与える、請求項3に記載のレーダ干渉回避装置。 - 前記指示手段は、前記第1の指示対象特定手段によって前記他車両のレーダ手段が特定されないとき、前記重複周波数特定手段によって特定された前記他車両のレーダ手段に対して、前記自車周波数帯域、及び互いの前記他車周波数帯域とそれぞれ重複しない前記他車周波数帯域に変更する指示を与える、請求項4に記載のレーダ干渉回避装置。
- 前記指示手段は、前記判断手段によって干渉すると判断されたとき、前記自車両のレーダ手段に対して、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の前記他車周波数帯域と重複しない前記自車周波数帯域に変更する指示を与える、請求項3に記載のレーダ干渉回避装置。
- 前記通信手段は、前記他車両のレーダ手段が、前記電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを他車符号パターンとして示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段が電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを示す自車符号パターンを前記自車両のレーダ手段の情報に基づき認識する自車符号パターン認識手段と、
前記領域重複レーダ特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車符号パターン認識手段によって認識された前記自車符号パターンと略一致する前記他車符号パターンを重畳した電磁波を放射する前記他車両のレーダ手段を、前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定するパターン特定手段とを含み、
前記パターン特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段と前記他車両のレーダ手段とが干渉する可能性があると判断し、
前記指示手段は、前記判断手段によって干渉する可能性があると判断されたとき、前記自車両のレーダ手段、及び前記パターン特定手段によって特定された前記他車両のレーダ手段の少なくともいずれか一方に対して、前記自車符号パターンと前記他車符号パターンとが互いに略一致しないよう変更する指示を与える、請求項2に記載のレーダ干渉回避装置。 - 前記通信手段は、前記他車両のレーダ手段が前記他車符号パターンを変更することが可能であるか否かを示す情報をさらに取得し、
前記指示手段は、
前記判断手段によって干渉する可能性があると判断されたとき、前記他車符号パターンを変更することが不可能な前記他車両のレーダ手段を、前記パターン特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定する第2の指示対象特定手段を含み、
前記第2の指示対象特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段に対して、前記パターン特定手段によって特定された前記他車両のレーダ手段の前記他車符号パターンと略一致しないように変更させる指示を与える、請求項7に記載のレーダ干渉回避装置。 - 前記指示手段は、前記第2の指示対象特定手段によって前記他車両のレーダ手段が特定されないとき、前記パターン特定手段によって特定された前記他車両のレーダ手段に対して、前記自車符号パターン、及び互いの前記他車符号パターンとそれぞれ重複しない前記他車符号パターンに変更するように指示を与える、請求項8に記載のレーダ干渉回避装置。
- 前記指示手段は、前記判断手段によって干渉すると判断されたとき、前記自車両のレーダ手段に対して、前記パターン特定手段によって特定された前記他車両のレーダ手段の前記他車符号パターンと略一致しない前記自車符号パターンに変更する指示を与える、請求項7に記載のレーダ干渉回避装置。
- 前記領域重複レーダ特定手段は、
現在よりも予め定められた期間だけ以前の間の前記自車領域に基づき、現在よりも当該予め定められた期間だけ経過したときの前記自車領域を推定する自車領域推定手段と、
現在よりも前記予め定められた期間だけ以前の間に前記通信手段によって取得された前記他車領域に基づき、現在よりも当該予め定められた期間だけ経過したときの前記他車領域を前記他車両のレーダ手段に対応付けて推定する他車領域推定手段とを含み、
前記自車領域推定手段によって推定された前記自車領域と重複する前記他車領域推定手段によって推定された前記他車領域に対応付けられた前記他車両のレーダ手段をさらに特定する、請求項2に記載のレーダ干渉回避装置。 - 前記通信手段は、前記他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、
前記重複周波数判断手段は、
前記自車両のレーダ手段の位置を示す自車レーダ位置を前記自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、
前記自車周波数帯域と重複する前記他車周波数帯域の前記他車両のレーダ手段を特定するとき、前記自車レーダ位置認識手段によって認識された前記自車レーダ位置と近い前記他車レーダ位置に存在する前記他車両のレーダ手段の前記他車周波数帯域から順番に前記自車周波数帯域と比較して特定し、
前記指示手段は、前記他車両のレーダ手段に対して指示を与えるとき、前記他車レーダ位置の内、前記自車レーダ位置と近い位置に存在する前記他車両のレーダ手段から順番に前記他車周波数帯域を変更する指示を与える、請求項5に記載のレーダ干渉回避装置。 - 前記通信手段は、前記他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、
前記パターン特定手段は、
前記自車両のレーダ手段の位置を示す自車レーダ位置を前記自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、
前記自車符号パターンと略一致する前記他車符号パターンの前記他車両のレーダ手段を特定するとき、前記自車レーダ位置認識手段によって認識された前記自車レーダ位置と近い前記他車レーダ位置に存在する前記他車両のレーダ手段の前記他車符号パターンから順番に前記自車符号パターンと比較して特定し、
前記指示手段は、前記他車両のレーダ手段に対して指示を与えるとき、前記他車レーダ位置の内、前記自車レーダ位置と近い位置に存在する前記他車両のレーダ手段から順番に前記他車符号パターンを変更する指示を与える、請求項9に記載のレーダ干渉回避装置。 - 前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達する前記他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記領域重複レーダ特定手段は、前記自車両のレーダ手段から放射される電磁波が到達する前記自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を、前記レーダ情報に基づき特定する、請求項2に記載のレーダ干渉回避装置。 - 前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達し、且つ当該他車両が走行している車線の対向車線を含む前記他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記領域重複レーダ特定手段は、前記自車両のレーダ手段から放射される電磁波が到達し、且つ当該自車両が走行している車線の対向車線を含む前記自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を前記レーダ情報に基づき特定する、請求項2に記載のレーダ干渉回避装置。 - 放射した電磁波と受信した反射波とに基づき、対象物を測定する自車両、及び他車両のレーダの情報を取得する取得ステップと、
前記取得ステップにおいて取得された自車両のレーダの情報、及び他車両のレーダの情報を示すレーダ情報に基づき、自車両のレーダと他車両のレーダとが互いに干渉する可能性があるか否かを判断する判断ステップと、
前記判断ステップにおいて干渉する可能性があると判断されたとき、自車両のレーダ、及び他車両のレーダの少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示ステップとを備える、レーダ干渉回避方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008214436A JP5146674B2 (ja) | 2008-08-22 | 2008-08-22 | レーダ干渉回避装置、及びレーダ干渉回避方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008214436A JP5146674B2 (ja) | 2008-08-22 | 2008-08-22 | レーダ干渉回避装置、及びレーダ干渉回避方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010048716A true JP2010048716A (ja) | 2010-03-04 |
| JP5146674B2 JP5146674B2 (ja) | 2013-02-20 |
Family
ID=42065911
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008214436A Expired - Fee Related JP5146674B2 (ja) | 2008-08-22 | 2008-08-22 | レーダ干渉回避装置、及びレーダ干渉回避方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5146674B2 (ja) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160134980A (ko) * | 2015-05-14 | 2016-11-24 | 전자부품연구원 | 차량용 레이더와 차량용 통신을 이용한 통신 시스템 및 방법 |
| EP3098625A1 (en) | 2015-05-27 | 2016-11-30 | Panasonic Intellectual Property Management Co., Ltd. | Radar device and interference prevention method |
| WO2017110418A1 (ja) * | 2015-12-21 | 2017-06-29 | 株式会社小糸製作所 | 車両用画像取得装置、制御装置、車両用画像取得装置または制御装置を備えた車両および車両用画像取得方法 |
| JP2018109875A (ja) * | 2017-01-04 | 2018-07-12 | 株式会社デンソーテン | 画像処理装置および画像処理方法 |
| JP2019012079A (ja) * | 2014-08-28 | 2019-01-24 | ウェイモ エルエルシー | 車両レーダ調整及び干渉低減のための方法及びシステム |
| JP2019158543A (ja) * | 2018-03-13 | 2019-09-19 | 古河電気工業株式会社 | レーダシステム |
| DE102019202836A1 (de) * | 2019-03-01 | 2020-09-03 | Denso Corporation | Verfahren und Radareinheit für ein Mildern einer Radarinterferenz |
| WO2021054342A1 (ja) * | 2019-09-20 | 2021-03-25 | ソニー株式会社 | 情報処理装置および制御方法 |
| JP2021515199A (ja) * | 2018-03-09 | 2021-06-17 | ウェイモ エルエルシー | 地図、車両状態、および環境に合わせたセンサ放射電力の調整 |
| JP2021174064A (ja) * | 2020-04-20 | 2021-11-01 | 株式会社Soken | 交通システム |
| US11194023B2 (en) | 2015-12-21 | 2021-12-07 | Koito Manufacturing Co., Ltd. | Image acquiring apparatus for vehicle, control device, vehicle having image acquiring apparatus for vehicle or control device, and image acquiring method for vehicle |
| US11204425B2 (en) | 2015-12-21 | 2021-12-21 | Koito Manufacturing Co., Ltd. | Image acquisition device for vehicles and vehicle provided with same |
| WO2022011598A1 (en) * | 2020-07-15 | 2022-01-20 | Qualcomm Incorporated | Assisted radar congestion mitigation |
| CN113985360A (zh) * | 2021-09-29 | 2022-01-28 | 森思泰克河北科技有限公司 | 雷达间抗相互干扰的方法、信号处理装置及雷达 |
| US11249172B2 (en) | 2015-12-21 | 2022-02-15 | Koito Manufacturing Co., Ltd. | Image acquiring apparatus for vehicle, control device, vehicle having image acquiring apparatus for vehicle or control device, and image acquiring method for vehicle |
| WO2022176924A1 (ja) * | 2021-02-17 | 2022-08-25 | 三菱電機株式会社 | レーダシステム、レーダ装置および干渉回避方法 |
| WO2022203879A1 (en) * | 2021-03-23 | 2022-09-29 | Qualcomm Incorporated | Radar transmission parameter selection for multi-radar coexistence |
| US11614511B2 (en) | 2020-09-17 | 2023-03-28 | Infineon Technologies Ag | Radar interference mitigation |
| JP2024500609A (ja) * | 2020-11-13 | 2024-01-10 | クゥアルコム・インコーポレイテッド | レーダ干渉緩和 |
| WO2024157793A1 (ja) * | 2023-01-27 | 2024-08-02 | ソニーグループ株式会社 | 情報処理方法、情報処理装置、および情報処理システム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11474235B2 (en) * | 2018-05-29 | 2022-10-18 | Qualcomm Incorporated | System and method to use reflected doppler radar signals to locate a second mobile device |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06160519A (ja) * | 1992-11-20 | 1994-06-07 | Miyoshi Denshi Kk | 車載レーダ装置 |
| JP2007263915A (ja) * | 2006-03-30 | 2007-10-11 | Fujitsu Ten Ltd | 車載レーダ装置及び車載レーダ管制システム |
| JP2008026095A (ja) * | 2006-07-20 | 2008-02-07 | Fujitsu Ten Ltd | 車載レーダ制御方法及び車載レーダ制御装置 |
-
2008
- 2008-08-22 JP JP2008214436A patent/JP5146674B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06160519A (ja) * | 1992-11-20 | 1994-06-07 | Miyoshi Denshi Kk | 車載レーダ装置 |
| JP2007263915A (ja) * | 2006-03-30 | 2007-10-11 | Fujitsu Ten Ltd | 車載レーダ装置及び車載レーダ管制システム |
| JP2008026095A (ja) * | 2006-07-20 | 2008-02-07 | Fujitsu Ten Ltd | 車載レーダ制御方法及び車載レーダ制御装置 |
Cited By (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113281753A (zh) * | 2014-08-28 | 2021-08-20 | 伟摩有限责任公司 | 用于协调车辆雷达及降低干扰的方法和系统 |
| JP2025163011A (ja) * | 2014-08-28 | 2025-10-28 | ウェイモ エルエルシー | 車両レーダ調整及び干渉低減のための方法及びシステム |
| US12196878B2 (en) | 2014-08-28 | 2025-01-14 | Waymo Llc | Methods and systems for vehicle radar coordination and interference reduction |
| JP2022062107A (ja) * | 2014-08-28 | 2022-04-19 | ウェイモ エルエルシー | 車両レーダ調整及び干渉低減のための方法及びシステム |
| JP2019012079A (ja) * | 2014-08-28 | 2019-01-24 | ウェイモ エルエルシー | 車両レーダ調整及び干渉低減のための方法及びシステム |
| US11237245B2 (en) | 2014-08-28 | 2022-02-01 | Waymo Llc | Methods and systems for vehicle radar coordination and interference reduction |
| KR20160134980A (ko) * | 2015-05-14 | 2016-11-24 | 전자부품연구원 | 차량용 레이더와 차량용 통신을 이용한 통신 시스템 및 방법 |
| KR102079410B1 (ko) * | 2015-05-14 | 2020-02-20 | 전자부품연구원 | 차량용 레이더와 차량용 통신을 이용한 통신 시스템 및 방법 |
| EP3098625A1 (en) | 2015-05-27 | 2016-11-30 | Panasonic Intellectual Property Management Co., Ltd. | Radar device and interference prevention method |
| US10222453B2 (en) | 2015-05-27 | 2019-03-05 | Panasonic Intellectual Property Management Co., Ltd. | Radar device and interference prevention method |
| US11204425B2 (en) | 2015-12-21 | 2021-12-21 | Koito Manufacturing Co., Ltd. | Image acquisition device for vehicles and vehicle provided with same |
| JPWO2017110418A1 (ja) * | 2015-12-21 | 2018-10-04 | 株式会社小糸製作所 | 車両用画像取得装置、制御装置、車両用画像取得装置または制御装置を備えた車両および車両用画像取得方法 |
| WO2017110418A1 (ja) * | 2015-12-21 | 2017-06-29 | 株式会社小糸製作所 | 車両用画像取得装置、制御装置、車両用画像取得装置または制御装置を備えた車両および車両用画像取得方法 |
| US11249172B2 (en) | 2015-12-21 | 2022-02-15 | Koito Manufacturing Co., Ltd. | Image acquiring apparatus for vehicle, control device, vehicle having image acquiring apparatus for vehicle or control device, and image acquiring method for vehicle |
| US11194023B2 (en) | 2015-12-21 | 2021-12-07 | Koito Manufacturing Co., Ltd. | Image acquiring apparatus for vehicle, control device, vehicle having image acquiring apparatus for vehicle or control device, and image acquiring method for vehicle |
| US11187805B2 (en) | 2015-12-21 | 2021-11-30 | Koito Manufacturing Co., Ltd. | Image acquiring apparatus for vehicle, control device, vehicle having image acquiring apparatus for vehicle or control device, and image acquiring method for vehicle |
| DE102017130118B4 (de) * | 2017-01-04 | 2020-10-29 | Denso Ten Limited | Bildverarbeitungsvorrichtung und bildverarbeitungsverfahren |
| JP2018109875A (ja) * | 2017-01-04 | 2018-07-12 | 株式会社デンソーテン | 画像処理装置および画像処理方法 |
| US10343603B2 (en) | 2017-01-04 | 2019-07-09 | Denso Ten Limited | Image processing device and image processing method |
| US11408991B2 (en) | 2018-03-09 | 2022-08-09 | Waymo Llc | Tailoring sensor emission power to map, vehicle state, and environment |
| JP2021515199A (ja) * | 2018-03-09 | 2021-06-17 | ウェイモ エルエルシー | 地図、車両状態、および環境に合わせたセンサ放射電力の調整 |
| JP2019158543A (ja) * | 2018-03-13 | 2019-09-19 | 古河電気工業株式会社 | レーダシステム |
| DE102019202836A1 (de) * | 2019-03-01 | 2020-09-03 | Denso Corporation | Verfahren und Radareinheit für ein Mildern einer Radarinterferenz |
| US12282099B2 (en) | 2019-09-20 | 2025-04-22 | Sony Group Corporation | Information processing apparatus and control method for distance measurement based on light emission |
| WO2021054342A1 (ja) * | 2019-09-20 | 2021-03-25 | ソニー株式会社 | 情報処理装置および制御方法 |
| JP2021174064A (ja) * | 2020-04-20 | 2021-11-01 | 株式会社Soken | 交通システム |
| WO2022011598A1 (en) * | 2020-07-15 | 2022-01-20 | Qualcomm Incorporated | Assisted radar congestion mitigation |
| US11614511B2 (en) | 2020-09-17 | 2023-03-28 | Infineon Technologies Ag | Radar interference mitigation |
| JP2024500609A (ja) * | 2020-11-13 | 2024-01-10 | クゥアルコム・インコーポレイテッド | レーダ干渉緩和 |
| JPWO2022176924A1 (ja) * | 2021-02-17 | 2022-08-25 | ||
| JP7270864B2 (ja) | 2021-02-17 | 2023-05-10 | 三菱電機株式会社 | レーダシステム、レーダ装置および干渉回避方法 |
| US12013479B2 (en) | 2021-02-17 | 2024-06-18 | Mitsubishi Electric Corporation | Radar system, radar device, and interference avoidance method |
| WO2022176924A1 (ja) * | 2021-02-17 | 2022-08-25 | 三菱電機株式会社 | レーダシステム、レーダ装置および干渉回避方法 |
| US12038523B2 (en) | 2021-03-23 | 2024-07-16 | Qualcomm Incorporated | Radar transmission parameter selection for multi-radar coexistence |
| WO2022203879A1 (en) * | 2021-03-23 | 2022-09-29 | Qualcomm Incorporated | Radar transmission parameter selection for multi-radar coexistence |
| CN113985360A (zh) * | 2021-09-29 | 2022-01-28 | 森思泰克河北科技有限公司 | 雷达间抗相互干扰的方法、信号处理装置及雷达 |
| WO2024157793A1 (ja) * | 2023-01-27 | 2024-08-02 | ソニーグループ株式会社 | 情報処理方法、情報処理装置、および情報処理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5146674B2 (ja) | 2013-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5146674B2 (ja) | レーダ干渉回避装置、及びレーダ干渉回避方法 | |
| KR101806029B1 (ko) | Gps 및 uwb 기술을 접목하여 차량의 위치를 감지하는 측위 시스템 및 방법 | |
| US11002849B2 (en) | Driving lane detection device and driving lane detection method | |
| JP5273213B2 (ja) | 走行支援システム及び車両用無線通信装置 | |
| JP6531903B2 (ja) | 物体検出装置 | |
| US9307369B2 (en) | Wireless position detection apparatus and storage medium | |
| US11506745B2 (en) | Vehicular self-positioning | |
| JP6291873B2 (ja) | 無線測位装置 | |
| CN109923598B (zh) | 车辆用物体检测装置及车辆用物体检测系统 | |
| KR102003339B1 (ko) | 정밀 위치 설정 장치 및 방법 | |
| JP5087909B2 (ja) | 無線測位システムおよび無線測位方法 | |
| CN112020658A (zh) | 电子设备、电子设备的控制方法以及电子设备的控制程序 | |
| JP6402201B2 (ja) | 位置検出システム | |
| US20230384444A1 (en) | Autonomous movement device and autonomous movement system | |
| JP4255772B2 (ja) | 車両管理装置、車両管理方法および車両管理プログラム | |
| CN112840234A (zh) | 探测方法、探测装置、探测系统及雷达 | |
| JP5593793B2 (ja) | 車両制御装置 | |
| CN110785676A (zh) | 上方障碍物检测方法及装置、系统、车辆、存储介质 | |
| JP6945773B2 (ja) | 障害物検出装置 | |
| JP6384254B2 (ja) | 端末装置 | |
| CN111954826A (zh) | 电子设备、电子设备的控制方法以及电子设备的控制程序 | |
| JP2014211332A (ja) | レーダ装置、レーダ装置の制御方法 | |
| US20250085107A1 (en) | Method for locating a user equipment with respect to a motor vehicle | |
| JP4644590B2 (ja) | 周辺車両位置検出装置および周辺車両位置検出方法 | |
| JP7600715B2 (ja) | 車載装置及び車両用システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100908 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110901 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120502 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120521 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120622 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121031 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121113 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5146674 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |