JP2010027611A - 嵌込型誘導近接センサおよびその設計方法 - Google Patents
嵌込型誘導近接センサおよびその設計方法 Download PDFInfo
- Publication number
- JP2010027611A JP2010027611A JP2009165731A JP2009165731A JP2010027611A JP 2010027611 A JP2010027611 A JP 2010027611A JP 2009165731 A JP2009165731 A JP 2009165731A JP 2009165731 A JP2009165731 A JP 2009165731A JP 2010027611 A JP2010027611 A JP 2010027611A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- proximity sensor
- core
- attenuation
- sleeve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001939 inductive effect Effects 0.000 title claims abstract description 25
- 238000000034 method Methods 0.000 title claims description 13
- 238000013461 design Methods 0.000 title claims description 9
- 229910052751 metal Inorganic materials 0.000 claims abstract description 57
- 239000002184 metal Substances 0.000 claims abstract description 57
- 230000005291 magnetic effect Effects 0.000 claims abstract description 23
- 239000000463 material Substances 0.000 claims abstract description 20
- 238000005259 measurement Methods 0.000 claims abstract description 9
- 230000035699 permeability Effects 0.000 claims abstract description 7
- 229920002994 synthetic fiber Polymers 0.000 claims abstract 3
- 229910001209 Low-carbon steel Inorganic materials 0.000 claims description 8
- 238000003780 insertion Methods 0.000 claims description 5
- 230000037431 insertion Effects 0.000 claims description 5
- 238000013016 damping Methods 0.000 claims description 4
- 230000005294 ferromagnetic effect Effects 0.000 claims description 4
- 229910000859 α-Fe Inorganic materials 0.000 claims description 3
- 239000003302 ferromagnetic material Substances 0.000 claims description 2
- 230000002093 peripheral effect Effects 0.000 claims description 2
- 229910000831 Steel Inorganic materials 0.000 abstract description 2
- 239000010959 steel Substances 0.000 abstract description 2
- 239000011248 coating agent Substances 0.000 description 28
- 238000000576 coating method Methods 0.000 description 28
- 238000004088 simulation Methods 0.000 description 14
- 238000006243 chemical reaction Methods 0.000 description 5
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 4
- 229910052802 copper Inorganic materials 0.000 description 4
- 239000010949 copper Substances 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000012528 membrane Substances 0.000 description 3
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 229910001369 Brass Inorganic materials 0.000 description 1
- HCHKCACWOHOZIP-UHFFFAOYSA-N Zinc Chemical compound [Zn] HCHKCACWOHOZIP-UHFFFAOYSA-N 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000011651 chromium Substances 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000011253 protective coating Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- 239000013077 target material Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 229910052725 zinc Inorganic materials 0.000 description 1
- 239000011701 zinc Substances 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/945—Proximity switches
- H03K17/95—Proximity switches using a magnetic detector
- H03K17/9505—Constructional details
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/945—Proximity switches
- H03K17/95—Proximity switches using a magnetic detector
- H03K17/9502—Measures for increasing reliability
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/945—Proximity switches
- H03K17/95—Proximity switches using a magnetic detector
- H03K17/952—Proximity switches using a magnetic detector using inductive coils
- H03K17/9537—Proximity switches using a magnetic detector using inductive coils in a resonant circuit
- H03K17/9542—Proximity switches using a magnetic detector using inductive coils in a resonant circuit forming part of an oscillator
- H03K17/9547—Proximity switches using a magnetic detector using inductive coils in a resonant circuit forming part of an oscillator with variable amplitude
Landscapes
- Switches That Are Operated By Magnetic Or Electric Fields (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Abstract
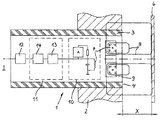
【解決手段】軟鋼取付板(2)内に嵌め込む誘導近接センサは前面にセンシング面(4)を形成する合成材料の前壁(16)を有する筺体と、1よりも大きい比透磁率を有する材料で作られたコア(9)付きセンサコイル(7)を含みコイルの磁界がターゲット(6)へ向かうように配置された発振器(10)と、センシング面(4)に垂直にコア(9)を取り囲んで配置された中空円筒金属部材(3)と、渦電流による発振器(10)の減衰を測定する測定回路(11)と、を含み、センサの嵌込可能性を改善するために、コア(9)は15μΩ・cmよりも低い電気抵抗率と40μmよりも小さい厚さを有する金属層により半径方向に囲まれている。
【選択図】図2
Description

ここに、dはセンサの筺体スリーブの外径(mm)であり、Sminはセンサ範囲(mm)である。
ここに、ρは材料の抵抗率[Ω・m]、
fは磁界の角周波数[Hz]、
μ0は自由空間の透磁率[N/A2]、
μrは材料の比透磁率である。
2 取付板
3、3’、3” スリーブ
4 センシング面
5 前面
6 ターゲット板
7 センサコイル
8 磁界線
9 コア
10 発振器
11 測定回路
12 出力回路
13 整流器
14 信号変換ユニット
15 筺体キャップ
16 前壁
17 周壁
18、18” 被覆
Claims (15)
- 金属取付板(2)内に嵌め込む誘導近接センサ(1)であって、前端にセンシング面(4)を形成する合成材料の前壁(16)を有する筺体と、前壁(16)の後ろで筺体内に配置される1よりも大きい比透磁率を有する材料、典型的にはフェライト、により構成されるコア(9)付きセンサコイル(7)を含む発振器(10)であって、コア(9)の開放側がコイルの磁界をセンシング面(4)の前のターゲット(6)へ向けるためにセンシング面(4)へ向けられるようにした発振器(10)と、センシング面(4)に垂直にかつコア(9)を取り囲んで配置された中空円筒金属部材と、渦電流による発振器(10)の減衰を測定する測定回路(11)と、を含み、
コア(9)は15μΩ・cmよりも小さい電気抵抗率と40μmよりも小さい厚さを有する金属層(18、18”)により半径方向に取り囲まれている、ことを特徴とする誘導近接センサ。 - 層(18、18”)は非強磁性金属により構成されることを特徴とする請求項1記載の誘導近接センサ。
- 層(18、18”)は金属部材およびコア間に配置されることを特徴とする請求項1または2記載の誘導近接センサ。
- 金属部材は金属スリーブ(3)であり、コア(9)はこのスリーブ(3)内に配置されることを特徴とする請求項1から3のいずれかに記載の誘導近接センサ。
- 前壁は筺体キャップ(15)の底(16)であり、キャップ(15)の周壁(17)はスリーブ(3’、3”)およびコア(9)間の間隙内へ延びておりそして層(18”)はこの壁(17)の内面上に配置されることを特徴とする請求項4記載の誘導近接センサ。
- 層(18、18”)は金属被覆であることを特徴とする請求項1から5のいずれかに記載の誘導近接センサ。
- 層(18、18”)の厚さは発振器(10)の動作周波数における層材料の表皮深さの半分よりも小さく、好ましくは、この表皮深さの30%よりも小さいことを特徴とする請求項1から6の1項記載の誘導近接センサ。
- 測定回路(11)は減衰が0.1(10%)以下の減衰に対応する基準閾値を超えるとすぐにセンサ回路の出力信号を変えるようにされていることを特徴とする請求項1から7の1項記載の誘導近接センサ。
- 層(18、18”)の厚さは、軟鋼ターゲット(6)に対して、渦電流により生じる減衰がセンサの嵌込状態における基準閾値に対応するセンシング面(4)とターゲット(6)間の距離が、センサの非嵌込状態における同じ距離から最大30%、好ましくは、最大20%しか違わないようにされていることを特徴とする請求項8記載の誘導近接センサ。
- 金属取付板(2)内に嵌め込む誘導近接センサ(1)であって、前端にセンシング面(4)を形成する合成材料の前壁(16)を有する筺体と、前壁(16)の後ろで筺体内に配置される1よりも大きい比透磁率を有する材料、典型的にはフェライト、により構成されるコア(9)付きセンサコイル(7)を含む発振器(10)であって、コア(9)の開放側がコイルの磁界をセンシング面(4)の前のターゲット(6)へ向けるためにセンシング面(4)へ向けられるようにした発振器(10)と、センシング面(4)に垂直にかつコア(9)を取り囲んで配置された中空円筒金属部材(3)と、渦電流による発振器(10)の減衰を測定する測定回路(11)と、を含み、
金属部材(3)は15μΩ・cmから50μΩ・cmの電気抵抗率を有する非強磁性材料により構成される、ことを特徴とする誘導近接センサ。 - 金属部材は金属スリーブ(3)でありコア(9)はこのスリーブ(3)内に配置されることを特徴とする請求項10記載の近接センサ。
- 測定回路(11)は減衰が10%以下の減衰に対応する予め定められた基準閾値を超えるとすぐにセンサ回路の出力信号を変えるようにされていることを特徴とする請求項10または11記載の近接センサ。
- コア(9)を取り囲むスリーブ部の電気抵抗率は、軟鋼ターゲット(6)に対して、渦電流により生じる減衰がセンサの嵌込状態における基準閾値に対応するセンシング面(4)とターゲット(6)間の距離がセンサの非嵌込状態における同じ距離から最大30%、好ましくは、最大20%しか違わないようにされていることを特徴とする請求項12記載の近接センサ。
- 請求項1から9のいずれかに記載の近接センサの設計方法であって、センサ(1)およびそのセンシング面(4)の前の固定距離に配置された軟鋼ターゲット(6)を含む構成において、発振器(10)の減衰がセンサ(1)の嵌込状態およびセンサ(1)の非嵌込状態において求められ、求められた減衰が両方の状態において同じでなければ、金属層(18、18”)の厚さが増分調節され、嵌込状態における減衰が非嵌込状態における減衰と実質的に等しくなる層(18、18”)の厚さを求めるためにこれらのステップが1回以上繰り返されることを特徴とする設計方法。
- 請求項10から13のいずれかに記載の近接センサの設計方法であって、センサ(1)およびそのセンシング面(4)の前の固定距離に配置された軟鋼ターゲット(6)を含む構成において、発振器(10)の減衰がセンサ(1)の嵌込状態およびセンサ(1)の非嵌込状態において求められ、求められた減衰が両方の状態において同じでなければ、コア(9)を取り囲む金属部材の電気抵抗率が増分調節され、嵌込状態における減衰が非嵌込状態における減衰と実質的に等しくなる前記金属部材の電気抵抗率を求めるためにこれらのステップが1回以上繰り返されることを特徴とする設計方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08405180.4 | 2008-07-15 | ||
| EP08405180 | 2008-07-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010027611A true JP2010027611A (ja) | 2010-02-04 |
| JP5461090B2 JP5461090B2 (ja) | 2014-04-02 |
Family
ID=40228011
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009165731A Expired - Fee Related JP5461090B2 (ja) | 2008-07-15 | 2009-07-14 | 嵌込型誘導近接センサおよびその設計方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8179124B2 (ja) |
| EP (1) | EP2146431A3 (ja) |
| JP (1) | JP5461090B2 (ja) |
| KR (1) | KR101634080B1 (ja) |
| CN (1) | CN101630021B (ja) |
| BR (1) | BRPI0902282A2 (ja) |
| RU (1) | RU2500982C2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120001751A1 (en) * | 2010-06-30 | 2012-01-05 | Welch Allyn, Inc. | Body Area Network Pairing Improvements for Clinical Workflows |
| WO2015004813A1 (ja) | 2013-07-12 | 2015-01-15 | 富士機械製造株式会社 | 部品組付装置における基板に部品を組み付ける方法及び部品組付装置 |
| US9000914B2 (en) | 2010-03-15 | 2015-04-07 | Welch Allyn, Inc. | Personal area network pairing |
| US9402545B2 (en) | 2010-06-30 | 2016-08-02 | Welch Allyn, Inc. | Medical devices with proximity detection |
| KR20180123626A (ko) | 2017-05-09 | 2018-11-19 | 오므론 가부시키가이샤 | 근접 센서 및 방법 |
| JP2019062268A (ja) * | 2017-09-25 | 2019-04-18 | オムロン株式会社 | 近接センサ |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010003221A1 (de) * | 2010-03-24 | 2011-09-29 | Balluff Gmbh | Elektronisches Bauteil für eine Sensorvorrichtung, Sensorvorrichtung und Verfahren zum Konfigurieren einer Sensorvorrichtung |
| US9932852B2 (en) * | 2011-08-08 | 2018-04-03 | General Electric Company | Sensor assembly for rotating devices and methods for fabricating |
| DE102012004308B4 (de) * | 2012-03-01 | 2018-09-20 | Atlas Elektronik Gmbh | Annäherungssensor und Verfahren zum Bestimmen der Annäherung an einen elektrisch leitfähigen Körper |
| JP6464460B2 (ja) * | 2014-01-28 | 2019-02-06 | 積水ポリマテック株式会社 | センサシート含有外装品およびセンサシートユニット並びにセンサシート含有外装品の製造方法 |
| EP2911299B1 (de) * | 2014-02-20 | 2020-08-26 | Pepperl + Fuchs GmbH | Verfahren und Schaltung zum Auswerten einer von einem Sensor erfassten physikalischen Messgröße |
| MX2018007209A (es) * | 2015-12-28 | 2018-08-01 | Eaton Intelligent Power Ltd | Sensor de junta de corriente parasita. |
| KR102278082B1 (ko) | 2019-05-22 | 2021-07-19 | 세메스 주식회사 | 필터 유닛과 그를 포함하는 기판 처리 장치 및 기판 처리 방법 |
| CN120668187B (zh) * | 2025-08-25 | 2025-11-11 | 成都凯天电子股份有限公司 | 一种抗干扰双余度磁屏蔽电感式接近传感器及调试方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007242633A (ja) * | 2001-03-15 | 2007-09-20 | Omron Corp | 近接センサ |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3438998A1 (de) | 1984-10-25 | 1986-04-30 | Werner Turck Gmbh & Co Kg, 5884 Halver | Induktiver, buendig in eine metallwand einbaubarer naeherungsschalter |
| DE60226847D1 (de) * | 2001-03-15 | 2008-07-10 | Omron Tateisi Electronics Co | Näherungssensor |
| JP3948444B2 (ja) * | 2002-09-06 | 2007-07-25 | オムロン株式会社 | 近接スイッチ |
| JP4218877B2 (ja) * | 2003-04-22 | 2009-02-04 | 株式会社山武 | 高周波発振型近接センサの設置方法および保護ブラケット |
| DE102005002238A1 (de) * | 2005-01-18 | 2006-07-20 | Robert Bosch Gmbh | Sensor zur Ortung metallischer Objekte sowie Messgerät mit einem solchen Sensor |
| CN1941628A (zh) * | 2005-08-31 | 2007-04-04 | Ifm电子股份有限公司 | 感应接近开关 |
| JP4596471B2 (ja) * | 2005-09-08 | 2010-12-08 | 株式会社山武 | 高周波発振型近接センサ |
| JP2007141762A (ja) * | 2005-11-22 | 2007-06-07 | Omron Corp | 近接センサ |
| DE102008064304A1 (de) * | 2008-12-20 | 2010-07-01 | Sms Siemag Aktiengesellschaft | Verfahren und Vorrichtung zur Messung der Schichtdicke von teilerstarrten Schmelzen |
-
2009
- 2009-06-22 EP EP09163373.5A patent/EP2146431A3/en not_active Withdrawn
- 2009-07-09 US US12/499,923 patent/US8179124B2/en not_active Expired - Fee Related
- 2009-07-13 BR BRPI0902282-1A patent/BRPI0902282A2/pt not_active Application Discontinuation
- 2009-07-14 CN CN200910152290.0A patent/CN101630021B/zh not_active Expired - Fee Related
- 2009-07-14 JP JP2009165731A patent/JP5461090B2/ja not_active Expired - Fee Related
- 2009-07-14 KR KR1020090063851A patent/KR101634080B1/ko not_active Expired - Fee Related
- 2009-07-15 RU RU2009126827/28A patent/RU2500982C2/ru not_active IP Right Cessation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007242633A (ja) * | 2001-03-15 | 2007-09-20 | Omron Corp | 近接センサ |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9504388B2 (en) | 2010-03-15 | 2016-11-29 | Welch Allyn, Inc. | Personal area network pairing |
| US9000914B2 (en) | 2010-03-15 | 2015-04-07 | Welch Allyn, Inc. | Personal area network pairing |
| US8957777B2 (en) * | 2010-06-30 | 2015-02-17 | Welch Allyn, Inc. | Body area network pairing improvements for clinical workflows |
| US9386924B2 (en) | 2010-06-30 | 2016-07-12 | Welch Allyn, Inc. | Body area network pairing improvements for clinical workflows |
| US9402545B2 (en) | 2010-06-30 | 2016-08-02 | Welch Allyn, Inc. | Medical devices with proximity detection |
| US20120001751A1 (en) * | 2010-06-30 | 2012-01-05 | Welch Allyn, Inc. | Body Area Network Pairing Improvements for Clinical Workflows |
| US10136817B2 (en) | 2010-06-30 | 2018-11-27 | Welch Allyn, Inc. | Body area network pairing improvements for clinical workflows |
| WO2015004813A1 (ja) | 2013-07-12 | 2015-01-15 | 富士機械製造株式会社 | 部品組付装置における基板に部品を組み付ける方法及び部品組付装置 |
| US10426070B2 (en) | 2013-07-12 | 2019-09-24 | Fuji Corporation | Method of mounting component on to substrate in component mounting device and component mounting device |
| KR20180123626A (ko) | 2017-05-09 | 2018-11-19 | 오므론 가부시키가이샤 | 근접 센서 및 방법 |
| JP2018189533A (ja) * | 2017-05-09 | 2018-11-29 | オムロン株式会社 | 近接センサおよび方法 |
| US10707868B2 (en) | 2017-05-09 | 2020-07-07 | Omron Corporation | Proximity sensor and method |
| JP2019062268A (ja) * | 2017-09-25 | 2019-04-18 | オムロン株式会社 | 近接センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101634080B1 (ko) | 2016-07-08 |
| EP2146431A2 (en) | 2010-01-20 |
| US8179124B2 (en) | 2012-05-15 |
| KR20100008343A (ko) | 2010-01-25 |
| RU2500982C2 (ru) | 2013-12-10 |
| CN101630021B (zh) | 2013-08-21 |
| BRPI0902282A2 (pt) | 2010-04-13 |
| CN101630021A (zh) | 2010-01-20 |
| JP5461090B2 (ja) | 2014-04-02 |
| EP2146431A3 (en) | 2014-07-30 |
| US20100013464A1 (en) | 2010-01-21 |
| RU2009126827A (ru) | 2011-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5461090B2 (ja) | 嵌込型誘導近接センサおよびその設計方法 | |
| CN103718035A (zh) | 用于测量薄层的厚度的测量探头 | |
| US5191286A (en) | Method and probe for non-destructive measurement of the thickness of thin layers and coatings | |
| US6777930B2 (en) | Sequentially non-destructive thickness measurement | |
| US9709426B2 (en) | Magnetic-inductive flowmeter | |
| JP6676653B2 (ja) | 変位センサおよび距離調節装置 | |
| TWI498525B (zh) | 電感距離感測器 | |
| US10533880B2 (en) | Position sensing using waveguide configured to conduct mechanical pulses triggered by magnetostriction | |
| CN111566459B (zh) | 探针单元 | |
| US20140002061A1 (en) | Inductive proximity sensor and method for fitting said sensor | |
| US20250341412A1 (en) | Magnetic-inductive flow measurement device | |
| CN109855524B (zh) | 一种覆层测厚仪传感器 | |
| JP2015148574A (ja) | 金属材料判別装置 | |
| CN108592776A (zh) | 利用霍尔效应测量铁基表面上非磁性涂层的探头 | |
| CN204963773U (zh) | 一种涂层测厚仪便捷探头 | |
| Syasko | Measuring the thicknesses of nonferromagnetic metal coatings on nonferrous metal products using the eddy-current frequency method | |
| CN205079731U (zh) | 一种涂层测厚仪探头 | |
| CN118339433A (zh) | 磁感应流量计 | |
| US20250035472A1 (en) | Method for operating a magnetic-inductive flowmeter | |
| GB2257520A (en) | Method and device for measuring the thickness of thin layers | |
| JPH07332916A (ja) | 膜厚計 | |
| EP4604398A1 (en) | Proximity sensor | |
| US9146168B1 (en) | Pressure sensor | |
| RU95395U1 (ru) | Индуктивный (трансформаторный) первичный измерительный преобразователь положения | |
| JP2008091147A (ja) | 近接センサ及び近接センサ用コア |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130625 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130925 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131024 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140115 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5461090 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |