JP2010025923A - 動的粘弾性測定装置 - Google Patents
動的粘弾性測定装置 Download PDFInfo
- Publication number
- JP2010025923A JP2010025923A JP2009131935A JP2009131935A JP2010025923A JP 2010025923 A JP2010025923 A JP 2010025923A JP 2009131935 A JP2009131935 A JP 2009131935A JP 2009131935 A JP2009131935 A JP 2009131935A JP 2010025923 A JP2010025923 A JP 2010025923A
- Authority
- JP
- Japan
- Prior art keywords
- viscoelastic fluid
- dynamic viscoelasticity
- actuator
- stress
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000012530 fluid Substances 0.000 claims abstract description 91
- 230000003068 static effect Effects 0.000 claims description 39
- 230000005284 excitation Effects 0.000 claims description 18
- 238000012544 monitoring process Methods 0.000 claims description 15
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims description 5
- 238000001514 detection method Methods 0.000 claims description 4
- 238000007789 sealing Methods 0.000 claims description 2
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 abstract 3
- 239000011347 resin Substances 0.000 description 25
- 229920005989 resin Polymers 0.000 description 25
- 238000011156 evaluation Methods 0.000 description 6
- 238000005187 foaming Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 239000004088 foaming agent Substances 0.000 description 5
- 238000012937 correction Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000005520 electrodynamics Effects 0.000 description 3
- 239000006260 foam Substances 0.000 description 3
- 238000001746 injection moulding Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000008602 contraction Effects 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 238000012856 packing Methods 0.000 description 2
- 238000004073 vulcanization Methods 0.000 description 2
- 229920002799 BoPET Polymers 0.000 description 1
- 239000002253 acid Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 230000002522 swelling effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- LLZRNZOLAXHGLL-UHFFFAOYSA-J titanic acid Chemical compound O[Ti](O)(O)O LLZRNZOLAXHGLL-UHFFFAOYSA-J 0.000 description 1
Images






Landscapes
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
Abstract
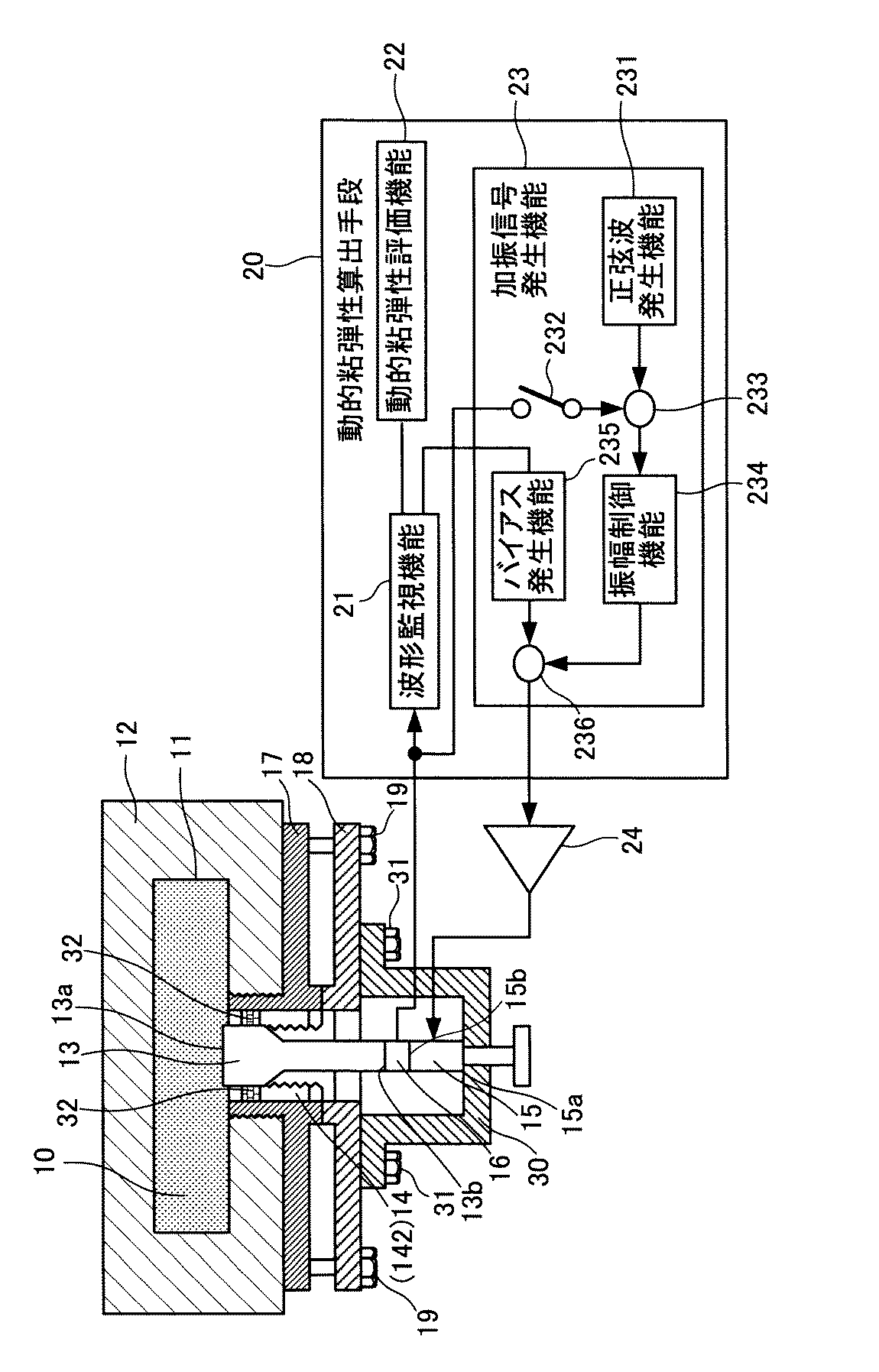
【解決手段】高温高圧の粘弾性流体10を収容する閉空間11を有する筐体12に取り付けられた基台30と、一端13aが閉空間11に面し、筐体12を貫通して配置される加振棒13と、加振棒13の一端13aまたは加振棒13の中間部に配置され、加振棒13と基台30との隙間から漏洩する粘弾性流体もしくは粘弾性流体が放出する気体をシールする弾性シール部材14と、固定端15aが基台30に固定され、自由端15bが加振棒13を介して粘弾性流体10を加振するアクチュエータ15と、粘弾性流体10の歪および応力の少なくとも一方を測定するセンサ16であって、アクチュエータ15の自由端15bと加振棒13の他端13bの間に配置されるセンサ16と、を備える。
【選択図】図1
Description
1.動電型振動アクチュエータ
2.超磁歪素子
3.ピエゾ素子
動電型振動アクチュエータは、永久磁石の磁場内に配置したコイルに交流電流を印加するとコイルが直線的に振動する一種のリニアモータであり、駆動力はボイスコイルを流れる電流値に応じた値となる。
(イ):加振棒13が振動中に粘弾性流体10から離れる状態
(ロ):加振棒13が振動中常時粘弾性流体10の表面に接触している状態
(ハ):加振棒13が振動中常時粘弾性流体10の中に食い込んでいる状態
を示している。
(イ)では加振棒が粘弾性流体に接触している間(左側)波形はほぼ正弦波となるが、加振棒が粘弾性流体から離れている間(右側)波形に欠けが生じる。
(ロ)では波形がほぼ正弦波となる。
(ハ)では波形はほぼ正弦波となるものの波形のボトムレベルにずれが生じる。
11:閉空間
12:筐体
13:加振棒
14:弾性シール部材
15:アクチュエータ
16:センサ
20:動的粘弾性算出手段
21:波形監視機能
22:動的粘弾性評価機能
23:加振信号発生機能
24:電力増幅器
25:静的歪監視機能
26:静的歪追従機構
30:基台
Claims (7)
- 高温高圧の粘弾性流体を収容する閉空間を有する筐体と、
前記筐体に取り付けられる基台と、
一端が前記閉空間に面し、前記筐体を貫通して配置される加振棒と、
前記加振棒の一端側または中間部に配置され、前記加振棒と前記筐体との隙間から漏洩する前記粘弾性流体もしくは前記粘弾性流体が放出する気体をシールする弾性シール部材と、
固定端が前記基台に固定され、自由端が前記加振棒を介して前記粘弾性流体を加振するアクチュエータと、
前記粘弾性流体の歪および応力の少なくとも一方を測定するセンサであって、前記アクチュエータの自由端と前記加振棒の他端との間に配置されるセンサと、を備える動的粘弾性測定装置。 - 前記アクチュエータが、駆動電圧もしくは駆動電流に応じた振幅を発生するものであり、
前記センサが、前記粘弾性流体の発生する応力を検出するものである請求項1に記載の動的粘弾性測定装置。 - 前記アクチュエータが、前記アクチュエータの振動振幅を一定に制御したときの駆動電圧もしくは駆動電流が前記粘弾性流体の発生する応力に応じた値となるものであり、
前記センサが、前記粘弾性流体の歪を検出するものである請求項1に記載の動的粘弾性測定装置。 - 前記センサの検出値、前記アクチュエータに印加する加振信号の振幅および周波数、ならびに前記弾性シール部材の特性に基づいて前記粘弾性流体の動的粘弾性を算出する動的粘弾性算出手段を備える請求項1から請求項3のいずれか一項に記載の動的粘弾性測定装置。
- 動的粘弾性算出手段が、加振信号に直流バイアスを重畳することが可能な加振信号発生機能を備える請求項1から請求項4のいずれか一項に記載の動的粘弾性測定装置。
- 前記アクチュエータの固定端と前記基台との間に配置され、前記加振棒と前記粘弾性流体との間の距離を変更可能な静的歪追従機構と、
前記加振棒の一端が前記粘弾性流体と接触するように前記静的歪追従機構を駆動する静的歪監視機構を備える請求項1から請求項5のいずれか一項に記載の動的粘弾性測定装置。 - 前記静的歪監視機構が、前記アクチュエータに正弦波を印加したときに、応力信号に欠けが生じた場合には前記静的歪追従機構に対して前記加振棒と前記粘弾性流体との間の距離を小さくする駆動信号を出力し、応力信号のボトムレベルにずれが生じた場合には前記静的歪追従機構に対して前記加振棒と前記粘弾性流体との間の距離を大きくする駆動信号を出力するものである請求項6に記載の動的粘弾性測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009131935A JP5327532B2 (ja) | 2008-06-19 | 2009-06-01 | 動的粘弾性測定装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008160696 | 2008-06-19 | ||
| JP2008160696 | 2008-06-19 | ||
| JP2009131935A JP5327532B2 (ja) | 2008-06-19 | 2009-06-01 | 動的粘弾性測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010025923A true JP2010025923A (ja) | 2010-02-04 |
| JP5327532B2 JP5327532B2 (ja) | 2013-10-30 |
Family
ID=41731881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009131935A Expired - Fee Related JP5327532B2 (ja) | 2008-06-19 | 2009-06-01 | 動的粘弾性測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5327532B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011202959A (ja) * | 2010-03-24 | 2011-10-13 | Imada Co Ltd | 動的粘弾性測定装置および動的粘弾性測定方法 |
| JP2012042364A (ja) * | 2010-08-20 | 2012-03-01 | Oiles Ind Co Ltd | 粘性せん断力計測用試験装置 |
| JP2016518605A (ja) * | 2013-04-26 | 2016-06-23 | マイクロ モーション インコーポレイテッド | 振動式センサ及び振動式センサにて振動を変える方法 |
| KR20210004109A (ko) * | 2019-07-03 | 2021-01-13 | 주식회사 엘지화학 | 벽지용 조성물의 발포 특성 평가방법, 벽지용 발포 조성물, 및 벽지 |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5192642A (ja) * | 1975-02-10 | 1976-08-13 | ||
| JPS52138987A (en) * | 1976-05-17 | 1977-11-19 | Toyo Boorudouin Kk | Method of and apparatus for detecting and providing optimum tension in viscoelasticity measurement |
| JPS57189025A (en) * | 1981-05-18 | 1982-11-20 | Kokusai Kikai Shindo Kenkyusho:Kk | Measuring device for dynamic spring constant |
| JPS5888145U (ja) * | 1981-12-10 | 1983-06-15 | 株式会社東洋精機製作所 | ゴム等の粘度、加硫度等の測定装置 |
| JPS6196358U (ja) * | 1984-11-29 | 1986-06-20 | ||
| JPS63269041A (ja) * | 1987-04-25 | 1988-11-07 | Japan Synthetic Rubber Co Ltd | 粘弾性測定装置 |
| JPH03274442A (ja) * | 1990-03-26 | 1991-12-05 | Bridgestone Corp | 粘弾性体の応力測定装置 |
| JPH06123696A (ja) * | 1992-10-13 | 1994-05-06 | Seiko Instr Inc | 動的粘弾性装置 |
| JPH0744839A (ja) * | 1993-07-30 | 1995-02-14 | Matsushita Electric Ind Co Ltd | ヘッド駆動装置 |
| JPH09126971A (ja) * | 1995-10-31 | 1997-05-16 | Shimadzu Corp | 熱機械分析装置 |
| JPH10288119A (ja) * | 1997-04-18 | 1998-10-27 | Nissan Motor Co Ltd | 燃料噴射弁の駆動装置 |
| JP2001099778A (ja) * | 1999-09-28 | 2001-04-13 | Seiko Instruments Inc | 動的粘弾性測定装置 |
| WO2005092487A1 (ja) * | 2004-03-26 | 2005-10-06 | National Institute Of Advanced Industrial Science And Technology | 超臨界処理方法およびそれに用いる装置 |
| JP2008029111A (ja) * | 2006-07-20 | 2008-02-07 | Saitama Prefecture | センサー機能付アクチュエータ装置および粘弾性測定装置 |
-
2009
- 2009-06-01 JP JP2009131935A patent/JP5327532B2/ja not_active Expired - Fee Related
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5192642A (ja) * | 1975-02-10 | 1976-08-13 | ||
| JPS52138987A (en) * | 1976-05-17 | 1977-11-19 | Toyo Boorudouin Kk | Method of and apparatus for detecting and providing optimum tension in viscoelasticity measurement |
| JPS57189025A (en) * | 1981-05-18 | 1982-11-20 | Kokusai Kikai Shindo Kenkyusho:Kk | Measuring device for dynamic spring constant |
| JPS5888145U (ja) * | 1981-12-10 | 1983-06-15 | 株式会社東洋精機製作所 | ゴム等の粘度、加硫度等の測定装置 |
| JPS6196358U (ja) * | 1984-11-29 | 1986-06-20 | ||
| JPS63269041A (ja) * | 1987-04-25 | 1988-11-07 | Japan Synthetic Rubber Co Ltd | 粘弾性測定装置 |
| JPH03274442A (ja) * | 1990-03-26 | 1991-12-05 | Bridgestone Corp | 粘弾性体の応力測定装置 |
| JPH06123696A (ja) * | 1992-10-13 | 1994-05-06 | Seiko Instr Inc | 動的粘弾性装置 |
| JPH0744839A (ja) * | 1993-07-30 | 1995-02-14 | Matsushita Electric Ind Co Ltd | ヘッド駆動装置 |
| JPH09126971A (ja) * | 1995-10-31 | 1997-05-16 | Shimadzu Corp | 熱機械分析装置 |
| JPH10288119A (ja) * | 1997-04-18 | 1998-10-27 | Nissan Motor Co Ltd | 燃料噴射弁の駆動装置 |
| JP2001099778A (ja) * | 1999-09-28 | 2001-04-13 | Seiko Instruments Inc | 動的粘弾性測定装置 |
| WO2005092487A1 (ja) * | 2004-03-26 | 2005-10-06 | National Institute Of Advanced Industrial Science And Technology | 超臨界処理方法およびそれに用いる装置 |
| JP2008029111A (ja) * | 2006-07-20 | 2008-02-07 | Saitama Prefecture | センサー機能付アクチュエータ装置および粘弾性測定装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011202959A (ja) * | 2010-03-24 | 2011-10-13 | Imada Co Ltd | 動的粘弾性測定装置および動的粘弾性測定方法 |
| JP2012042364A (ja) * | 2010-08-20 | 2012-03-01 | Oiles Ind Co Ltd | 粘性せん断力計測用試験装置 |
| JP2016518605A (ja) * | 2013-04-26 | 2016-06-23 | マイクロ モーション インコーポレイテッド | 振動式センサ及び振動式センサにて振動を変える方法 |
| JP2017167159A (ja) * | 2013-04-26 | 2017-09-21 | マイクロ モーション インコーポレイテッド | 振動式センサ及び振動式センサにて振動を変える方法 |
| KR20210004109A (ko) * | 2019-07-03 | 2021-01-13 | 주식회사 엘지화학 | 벽지용 조성물의 발포 특성 평가방법, 벽지용 발포 조성물, 및 벽지 |
| KR102715201B1 (ko) * | 2019-07-03 | 2024-10-11 | 주식회사 엘지화학 | 벽지용 조성물의 발포 특성 평가방법, 벽지용 발포 조성물, 및 벽지 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5327532B2 (ja) | 2013-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5327532B2 (ja) | 動的粘弾性測定装置 | |
| JP5719921B2 (ja) | 共鳴周波数に基づく圧力センサ | |
| KR101403030B1 (ko) | 초음파 피로시험장치 | |
| JP2016121928A (ja) | 疲労試験装置 | |
| Giraud et al. | Vector control method applied to a traveling wave in a finite beam | |
| Wang et al. | Compressible dielectric elastomer actuators in high hydrostatic pressures: Models and experiments | |
| JP5623868B2 (ja) | 圧電特性計測システムおよび圧電特性計測方法 | |
| JP2009281932A (ja) | 濃度計測装置及び溶液濃度を計測する方法 | |
| JP5674159B2 (ja) | 粘度の測定方法および粘度測定装置 | |
| KR101702873B1 (ko) | 고유진동수를 이용한 정밀 무게측정장치 | |
| US11067519B2 (en) | Strain detecting device and diagnosing device | |
| US20120313484A1 (en) | Ultrasonic sensor | |
| US11029269B2 (en) | Monitoring device | |
| KR20020005417A (ko) | 센서 | |
| US12208427B2 (en) | Ultrasonic transducer having state monitoring function and ultrasonic cleaning device using the same | |
| FI125492B (en) | pressure sensor | |
| Somerset et al. | Design and dynamics of oil filled flexural ultrasonic transducers for elevated pressures | |
| Chiba et al. | Electroactive Polymer “Artificial Muscle” Operable in Ultra-High Hydrostatic Pressure Environment | |
| KR101211635B1 (ko) | 차압계 교정 장치 및 압력계 교정장치 | |
| CN208432333U (zh) | 一种台面组合体 | |
| JP5999680B2 (ja) | 線形弾性率の測定方法及び線形弾性率測定装置 | |
| JP2004347369A (ja) | 超音波振動子および超音波流量計 | |
| RU2467297C1 (ru) | Пульсатор быстропеременного давления | |
| Kirichok et al. | Thermomechanical Behavior and Durability of Shear-Compliant Inelastic Shells of Revolutionwith Piezo-Electric Pads During Axisymmetric Resonant Vibrations | |
| US20120313487A1 (en) | Ultrasonic sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130417 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130423 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130702 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130710 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5327532 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |