JP2010019838A - 多相システムに関する性質を決定するための方法及び装置 - Google Patents
多相システムに関する性質を決定するための方法及び装置 Download PDFInfo
- Publication number
- JP2010019838A JP2010019838A JP2009159932A JP2009159932A JP2010019838A JP 2010019838 A JP2010019838 A JP 2010019838A JP 2009159932 A JP2009159932 A JP 2009159932A JP 2009159932 A JP2009159932 A JP 2009159932A JP 2010019838 A JP2010019838 A JP 2010019838A
- Authority
- JP
- Japan
- Prior art keywords
- sample
- tube
- tubes
- array
- transmitted
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/47—Scattering, i.e. diffuse reflection
- G01N21/49—Scattering, i.e. diffuse reflection within a body or fluid
- G01N21/51—Scattering, i.e. diffuse reflection within a body or fluid inside a container, e.g. in an ampoule
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/02—Food
- G01N33/10—Starch-containing substances, e.g. dough
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/26—Oils; viscous liquids; paints; inks
- G01N33/28—Oils, i.e. hydrocarbon liquids
- G01N33/2823—Oils, i.e. hydrocarbon liquids raw oil, drilling fluid or polyphasic mixtures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume, or surface-area of porous materials
- G01N15/04—Investigating sedimentation of particle suspensions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/02—Food
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/02—Food
- G01N33/14—Beverages
Abstract
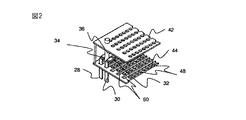
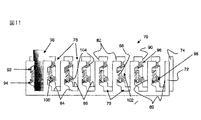
【解決手段】多相システムに関する性質を決定するための方法及び装置が提供される。方法では、それぞれが多相システムのサンプルを含むサンプルチューブのアレイが形成される。反復過程が、それぞれのサンプルに対する透過及び/後方散乱した値の少なくとも2つのデータセットを生成するために用いられ、それぞれのサンプルに対するデータセットが、サンプルの少なくとも1つの性質を決定するために処理される。装置は、サンプルチューブのアレイがその上で組み立てられるサポートと、波ソース及びそれぞれのサンプルに対する透過及び/又は後方散乱した値のデータセットを生成する少なくとも1つの波検出器と、波ソースを反復して操作して、それぞれのサンプルに対するデータセットを処理してサンプルの少なくとも1つの性質を決定するコンピュータ手段とを備える。
【選択図】図1
Description
a)それぞれが多相システムのサンプルを含むサンプルチューブのアレイを形成することと、
b)反復過程において、それぞれのサンプルに対する透過及び/又は後方散乱した放射の値の少なくとも2つのデータセット(data set)を生成することと、
c)それぞれのサンプルに対する上記データセットを処理して上記サンプルの少なくとも1つの性質を決定することと、
を備える。
下記の実施例は、更に本発明を示し且つ説明するために示されるが、いかなる意味においても本発明を制限するものとしてとらえられるべきではない。
b)反復過程において、それぞれのサンプルに対する透過及び/又は後方散乱した値の少なくとも2つのデータセットを生成することと、
c)それぞれのサンプルに対する上記データセットを処理して上記サンプルの少なくとも1つの性質を決定することと、
を備える多相システムに関する性質を決定するための方法。
Claims (2)
- a)それぞれが多相システムのサンプルを含むサンプルチューブのアレイを形成することと、
b)反復過程において、それぞれのサンプルに対する透過及び/又は後方散乱した値の少なくとも2つのデータセットを生成することと、
c)それぞれのサンプルに対する前記データセットを処理して前記サンプルの少なくとも1つの性質を決定することと、
を備える多相システムに関する性質を決定するための方法。 - それぞれが多相システムのサンプルを含んでいるサンプルチューブのアレイがその上で組み立てられるサポートと、
波ソース及びそれぞれのサンプルに対して透過及び/又は後方散乱した値を検出するための少なくとも1つの波検出器と、
前記波ソースを反復して操作するためのコンピュータ手段と、
を備え、
前記少なくとも1つの検出器は、それぞれのサンプルに対する透過及び/又は後方散乱した値のデータセットを生成し、前記コンピュータ手段は、それぞれのサンプルに対する前記データセットを処理して前記サンプルの少なくとも1つの性質を決定する、多相システムに関する性質を決定するための装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB0812455.4 | 2008-07-08 | ||
| GBGB0812455.4A GB0812455D0 (en) | 2008-07-08 | 2008-07-08 | Methods of and apparatus for determining properties relating to multi-phase systems |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010019838A true JP2010019838A (ja) | 2010-01-28 |
| JP2010019838A5 JP2010019838A5 (ja) | 2012-08-23 |
| JP5680840B2 JP5680840B2 (ja) | 2015-03-04 |
Family
ID=39718134
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009159932A Expired - Fee Related JP5680840B2 (ja) | 2008-07-08 | 2009-07-06 | 多相システムに関する性質を決定するための方法及び装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8432549B2 (ja) |
| EP (2) | EP3104166A1 (ja) |
| JP (1) | JP5680840B2 (ja) |
| CN (1) | CN101625320B (ja) |
| AU (1) | AU2009202720B2 (ja) |
| CA (1) | CA2670525A1 (ja) |
| GB (1) | GB0812455D0 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2938917B1 (fr) * | 2008-11-26 | 2018-05-18 | Formulaction | Dispositif d'analyse d'un melange polyphasique via un faisceau de lumiere retrodiffusee par celui-ci |
| FR2963104B1 (fr) * | 2010-07-22 | 2012-07-27 | Cybio France Sarl | Appareil et procede de detection automatise de phases pour analyse automatisee. |
| US20120140213A1 (en) * | 2010-12-02 | 2012-06-07 | General Electric Company | Static desalter simulator |
| FR3003351B1 (fr) * | 2013-03-12 | 2015-03-13 | Formulaction | Appareil d'analyse de phases de melanges polyphasiques |
| CN206146945U (zh) * | 2016-10-21 | 2017-05-03 | 陕西高源体外诊断试剂有限公司 | Frd上皮组织染色涂敷器用颜色辅助判读装置 |
| CN107389509B (zh) * | 2017-07-07 | 2019-06-04 | 中国科学院过程工程研究所 | 一种提高多相体系中低亮度分散相颗粒辨识度的方法 |
| DE102018212489A1 (de) * | 2018-07-26 | 2020-01-30 | Implen GmbH | Vorrichtung für eine lichtspektroskopische Analyse |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07103968A (ja) * | 1993-09-30 | 1995-04-21 | Sekisui Chem Co Ltd | 血液分離剤 |
| JP2002510796A (ja) * | 1998-04-02 | 2002-04-09 | ステイヒテイング・ネーデルランズ・インステイテユート・フール・ツイベロンデルツエク | 多相システムの中の変化に加え特性も測定するために拡散波スペクトロスコピーを応用する配備と方法 |
| JP2004037322A (ja) * | 2002-07-04 | 2004-02-05 | Aloka Co Ltd | 検体分析装置 |
| JP2005265813A (ja) * | 2004-03-22 | 2005-09-29 | Ids:Kk | 試験管の検知方法及び検知装置 |
| WO2006053208A1 (en) * | 2004-11-10 | 2006-05-18 | Becton, Dickinson And Company | System and method for determining sample volume in a container |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB812455A (en) | 1956-10-08 | 1959-04-22 | Wahl Clipper Corp | Screw adjustment mechanism |
| FR2720160B1 (fr) | 1994-05-17 | 1996-07-26 | Gerard Meunier | Procédé et appareil d'analyse des phases d'un mélange polyphasique. |
| ATE398185T1 (de) * | 1997-05-05 | 2008-07-15 | Chemometec As | Verfahren und system zur bestimmung von somazellen in milch |
| US6519032B1 (en) | 1998-04-03 | 2003-02-11 | Symyx Technologies, Inc. | Fiber optic apparatus and use thereof in combinatorial material science |
| AU778492B2 (en) | 2000-04-07 | 2004-12-09 | Rohm And Haas Company | Method and apparatus for determining the dispersion stability of a liquid suspension |
| US6691057B2 (en) | 2001-02-26 | 2004-02-10 | L.U.M. Gesellschaft Fur Labor- Umweltdiagnostic & Medizintechnik Mbh | Method and device for accelerated stability analysis |
| US20030098969A1 (en) | 2001-11-28 | 2003-05-29 | Gil Katz | Spectroscopic fluid analyzer |
| US7150996B2 (en) | 2003-06-18 | 2006-12-19 | Stable Solutions, Inc. | Stability assessment of dispersions and emulsions |
| CN1839312A (zh) * | 2003-06-18 | 2006-09-27 | 稳定技术公司 | 分散相和乳化液的加速稳定性评估 |
| EP1494007B8 (de) | 2003-06-30 | 2014-09-24 | Tecan Trading AG | Vorrichtung und Verfahren zum Analysieren von Proben |
| US7339668B2 (en) * | 2005-10-18 | 2008-03-04 | Thermo Electron Scientific Instruments Llc | Spectrometer for analysis of multiple samples |
-
2008
- 2008-07-08 GB GBGB0812455.4A patent/GB0812455D0/en not_active Ceased
-
2009
- 2009-06-25 CA CA002670525A patent/CA2670525A1/en not_active Abandoned
- 2009-06-26 US US12/492,852 patent/US8432549B2/en active Active
- 2009-07-01 EP EP16180318.4A patent/EP3104166A1/en not_active Withdrawn
- 2009-07-01 EP EP20090164342 patent/EP2144051A1/en not_active Ceased
- 2009-07-06 CN CN200910158408.0A patent/CN101625320B/zh not_active Expired - Fee Related
- 2009-07-06 AU AU2009202720A patent/AU2009202720B2/en not_active Ceased
- 2009-07-06 JP JP2009159932A patent/JP5680840B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07103968A (ja) * | 1993-09-30 | 1995-04-21 | Sekisui Chem Co Ltd | 血液分離剤 |
| JP2002510796A (ja) * | 1998-04-02 | 2002-04-09 | ステイヒテイング・ネーデルランズ・インステイテユート・フール・ツイベロンデルツエク | 多相システムの中の変化に加え特性も測定するために拡散波スペクトロスコピーを応用する配備と方法 |
| JP2004037322A (ja) * | 2002-07-04 | 2004-02-05 | Aloka Co Ltd | 検体分析装置 |
| JP2005265813A (ja) * | 2004-03-22 | 2005-09-29 | Ids:Kk | 試験管の検知方法及び検知装置 |
| WO2006053208A1 (en) * | 2004-11-10 | 2006-05-18 | Becton, Dickinson And Company | System and method for determining sample volume in a container |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2144051A1 (en) | 2010-01-13 |
| JP5680840B2 (ja) | 2015-03-04 |
| CN101625320A (zh) | 2010-01-13 |
| GB0812455D0 (en) | 2008-08-13 |
| AU2009202720B2 (en) | 2013-10-10 |
| AU2009202720A1 (en) | 2010-01-28 |
| US8432549B2 (en) | 2013-04-30 |
| CA2670525A1 (en) | 2010-01-08 |
| CN101625320B (zh) | 2015-04-01 |
| EP3104166A1 (en) | 2016-12-14 |
| US20100007891A1 (en) | 2010-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5680840B2 (ja) | 多相システムに関する性質を決定するための方法及び装置 | |
| AU740150B2 (en) | Microplate scanning read head | |
| US5592289A (en) | Self-aligning mechanism for positioning analyte receptacles | |
| CN105358958A (zh) | 用于分析液滴中所含样本的光学测量仪器和方法 | |
| KR102550613B1 (ko) | 입자들의 안정성 및 응집도를 광학적으로 측정하는 시스템 및 방법 | |
| JPWO2008044329A1 (ja) | 分光光度計 | |
| JPH11511562A (ja) | プレート・ホルダ | |
| JP2008504561A (ja) | 共焦点液体レベル測定 | |
| US8743367B2 (en) | Optical resonance analysis using a multi-angle source of illumination | |
| US8810804B2 (en) | Optical reader systems and methods with rapid microplate position detection | |
| US20120212748A1 (en) | Optical reader systems and methods for microplate position detection | |
| US4902132A (en) | Automated capillary scanning system | |
| JP4696934B2 (ja) | 分析装置 | |
| KR101472504B1 (ko) | 시료 분석을 위한 광경로 자동조절 방법 및 이를 포함하는 시료 분석 방법과 그 장치. | |
| JP6658752B2 (ja) | 検出チップ、検出方法、検出装置および検出システム | |
| US20020093654A1 (en) | Apparatus and method for imaging | |
| JP2013061357A (ja) | 試料セル及びそれを用いた粒度分布測定装置 | |
| CN105606586A (zh) | 高稳定性的表面增强拉曼光谱的液相检测装置及检测方法 | |
| JP6109576B2 (ja) | マイクロプレート取り付けシステム及び検出方法 | |
| CN117396748A (zh) | 测光装置和分析装置 | |
| JPS61247943A (ja) | 光学測定装置 | |
| JPWO2014141516A1 (ja) | 光分析装置の評価方法およびファントムサンプル | |
| JPH0617865B2 (ja) | 化学分析用測光部 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120705 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120705 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20121105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130717 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130723 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140401 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140630 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140703 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141209 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150108 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5680840 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |