JP2010019198A - 内燃機関の失火判定装置 - Google Patents
内燃機関の失火判定装置 Download PDFInfo
- Publication number
- JP2010019198A JP2010019198A JP2008181920A JP2008181920A JP2010019198A JP 2010019198 A JP2010019198 A JP 2010019198A JP 2008181920 A JP2008181920 A JP 2008181920A JP 2008181920 A JP2008181920 A JP 2008181920A JP 2010019198 A JP2010019198 A JP 2010019198A
- Authority
- JP
- Japan
- Prior art keywords
- misfire
- cylinder
- expansion stroke
- rotational fluctuation
- misfire determination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【解決手段】 エンジン1の回転変動量ΔNEが所定の閾値N1を越えた際、失火が生じた可能性があると判断する。ロックアップクラッチが非ロックアップ状態にある場合には、回転変動の変化が比較的大きいものとして規定されている第1の回転変動パターンに基づいて失火判定動作を実行する。ロックアップクラッチがロックアップ状態にある場合には、回転変動の変化が上記第1の回転変動パターンよりも小さく規定されている第2の回転変動パターンに基づいて失火判定動作を実行する。これにより、エンジン1と自動変速機50との共振現象が発生している状況であっても、失火の誤判定が回避できる。
【選択図】 図2
Description
上記の目的を達成するために講じられた本発明の解決原理は、失火の有無を内燃機関の回転変動パターンを認識することによって判定し、その判定のための回転変動パターンとして、ロックアップクラッチがロックアップ状態にある場合と非ロックアップ状態にある場合とで失火判定パターンを異ならせるようにしている。更に、ロックアップクラッチがロックアップ状態にある場合には非ロックアップ状態にある場合に比べて、回転変動幅が小さくても失火が発生していると判定できるように、失火判定条件を緩めている。これにより、上記ロックアップ状態で共振現象が発生している状況であっても、失火の誤判定が回避できるようにしている。
具体的に、本発明は、ロックアップクラッチを有する流体式動力伝達装置を介して変速機に連結された内燃機関の回転変動量が所定の閾値を超えたときに失火が生じている可能性があると判断し、内燃機関の回転変動パターンが失火発生時に特有のパターンであるか否かを判定することによって失火判定を行う内燃機関の失火判定装置を前提とする。この失火判定装置に対し、上記ロックアップクラッチの非ロックアップ状態において、内燃機関の回転変動パターンが、非ロックアップ状態での失火発生時に特有の第1の回転変動パターンに沿っているか否かによって失火判定動作を行うと共に、上記ロックアップクラッチのロックアップ状態において、内燃機関の回転変動パターンが、ロックアップ状態での失火発生時に特有の第2の回転変動パターンに沿っているか否かによって失火判定動作を行う失火判定手段を備えさせる。そして、上記第2の回転変動パターンを、第1の回転変動パターンに比べて、回転変動の変化が小さいものとして規定している。
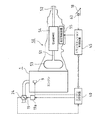
先ず、図1を参照して、本実施形態に係る失火判定装置が適用されるエンジン(内燃機関)、並びにその周辺装置の概略構成について説明する。図1に示すように、本実施形態に係るエンジン1は、4気筒分(図1では1気筒分のみを示す)のシリンダボア2を有するシリンダブロック1aと、シリンダヘッド1bとを備えている。各シリンダボア2内には上下動可能に設けられたピストン3が備えられ、このピストン3が、コンロッド(コネクティングロッド)3aを介してエンジン1の出力軸であるクランクシャフト10に連結されている。そして、シリンダボア2の内部において、ピストン3とシリンダヘッド1bとにより囲まれた空間によって燃焼室4が区画形成されている。
次に、上記エンジン1からの回転動力が伝達され、且つ変速動作を行う自動変速機について説明する。図2は、上記エンジン1と自動変速機50との接続状態を示す概略構成図である。また、図3は、トルクコンバータ(流体式動力伝達装置)53の概略構成を示す図である。
上記油圧制御装置55は、トランスミッション制御装置45により制御される。つまり、このトランスミッション制御装置45による油圧制御装置55の制御により、変速機構部54における適宜の変速段つまり動力伝達経路を成立させるようになっている。
上述したロックアップクラッチ53fの係合状態、解放状態、半係合状態の切り換え動作は、例えば図5に示すようなロックアップクラッチ作動マップに従って行われる。このロックアップクラッチ作動マップは、車速Vおよびアクセル開度θTHをパラメータとし、それら車速Vおよびアクセル開度θTHに応じて、ロックアップクラッチ53fを、係合状態(ロックアップ状態)、解放状態(トルコン状態)、半係合状態(フレックスロックアップ状態:スリップ状態)の間で切り換えるためのマップであって、上記トランスミッション制御装置45のROM内に記憶されている。
次に、本形態の特徴部分であるエンジン失火判定のための構成(失火判定装置の構成)およびその動作について説明する。
ΔNE0=(T4−T3)−(T2−T1) …(1)
から算出する。
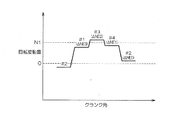
上記判別動作では、上記各回転変動量ΔNE0〜ΔNE3(本判別動作における経時変化パターンの1サイクル)のうち、特に2点火前(判定動作開始タイミングである回転変動量ΔNE0の算出時に膨張行程を迎えている気筒よりも点火タイミングで2点火前の気筒が膨張行程を迎えていた際)の算出量ΔNE2が所定値(閾値)N1以上になったときに(エンジン1の回転変動量が所定の閾値を超えた場合に膨張行程を迎えていた気筒を失火判定対象気筒として失火判定を行う場合)、各回転変動量ΔNE0〜ΔNE3の関係に基づき、失火の発生の有無を判別する。
(b)ΔNE2×B≧ΔNE3、且つ
(c)ΔNE2×C≧ΔNE1
これら(a)〜(c)の論理積が満たされることを条件として、回転変動量がΔNE2である気筒(第3番気筒#3)で失火が発生していると判断されることになる。
上述した実施形態では、第2の回転変動パターンを以下のように規定していた。つまり、失火判定対象気筒である第3番気筒#3の膨張行程時に算出された回転変動量ΔNE2が、その直前の第1番気筒#1の膨張行程時に算出された回転変動量ΔNE3に比べて特に大きく、また、第3番気筒#3の膨張行程時に算出された回転変動量ΔNE2と、その直後の第4番気筒#4の膨張行程時に算出された回転変動量ΔNE1とには大きな差は生じないものとして規定していた。これに限らず、以下のように規定してもよい。
(h)ΔNE1<ΔNE2、且つ
(i)|ΔNE0|≒ΔNE2
更には、第2の回転変動パターンを以下に述べるパターンとして規定してもよい。
(k)ΔNE1>ΔNE2、且つ
(l)|ΔNE0|≒ΔNE2
(悪路走行を判別する変形例)
上述した実施形態では、ロックアップクラッチ53fが非ロックアップ状態にある場合の失火判定とロックアップ状態にある場合の失火判定とを実施するようにしていた。本変形例では、それに加えて、ロックアップクラッチ53fがロックアップ状態にある場合に、失火が発生している状況と悪路を走行している状況とを識別可能とするものである。以下、具体的に説明する。
(a)ΔNE2×A<|ΔNE0|、且つ
(b)ΔNE2×B≧ΔNE3、且つ
(c)ΔNE2×C≧ΔNE1
が予め定められている。これら(a)〜(c)の論理積が満たされることを条件として、回転変動量ΔNE2が特に大きくなったことの判断が可能になる。
(d)−(ΔNE2×D)>ΔNE0、または
(e)ΔNE2×E≦ΔNE3、または
(f)ΔNE2×F≦ΔNE1
も予め定められている。これら(d)〜(f)の論理和が満たされることを条件として、回転変動量の多い状態が比較的長く続いていることの判断が可能になる。
上記実施の形態は、以下のように変更して実施してもよい。
・上記実施形態および変形例では、本発明を自動車用4気筒ガソリンエンジンに適用した場合について説明したが、本発明は、これに限るものではなく、種々のエンジンに対して適用できる。
・上記実施形態および変形例では、所定値N1をエンジン回転速度NEおよび吸気管内圧力PMに基づき算出するようにしたが、これに限られない。例えば、この所定値N1を、エンジン回転速度NEおよび吸気管内圧力PMの何れか一方に基づき算出したり、あるいは他のパラメータに基づき算出してもよい。また、吸気管内圧力PMに代えて吸入空気量を検出するシステムにあっては、この吸入空気量を代用しても勿論よい。他方、所定値N1を一定の値として設定するようにしてもよい。要は、失火の発生に伴う回転変動量ΔNEの変化を好適に監視できるのであれば、所定値N1をどのように算出、若しくは設定してもよい。
・上記実施形態および変形例では、各定数A〜Fをエンジン回転速度NEに基づき算出するようにしたが、これに限らず、例えば各定数A〜Fを吸気管内圧力PMや吸入空気量に基づいて算出したり、あるいは他のパラメータに基づき算出したりするようにしてもよい。また、各定数A〜Fを一定の値として設定するようにしてもよい。要は、失火パターン、悪路パターンを好適なパターンとして設定できるのであれば、定数A〜Fをどのように算出、若しくは設定するようにしてもよい。
・上記実施形態では、検出カウンタ(1000revカウンタ)によって総検出回数を、失火カウンタによって失火発生の検出回数をそれぞれカウントすることで、失火発生の検出頻度を求めるようにしたが、これら頻度の求め方も任意である。
・上記実施形態では、回転変動量を上記(1)式から算出するようにしたが、これに限られない。要は、失火発生に伴うエンジン回転速度の変動を把握することが可能な態様であれば、回転変動量の算出態様を適宜変更してもよい。
・上記実施形態では、クランク角度の位相が360°離れた気筒における経過時間の偏差ΔNEを求めるようにしていたが、この偏差ΔNEを求めるために対比される気筒はこれに限るものではない。また、上記偏差ΔNEの演算に用いる経過時間T1〜T4を求めるためのクランクシャフト10の回転角度も30°に限らず任意の角度が設定可能である。
50 自動変速機
53 トルクコンバータ(流体式動力伝達装置)
53f ロックアップクラッチ
54 変速機構部
N1 閾値
♯1 第1気筒(1点火前気筒)
♯2 第2気筒(2点火後気筒)
♯3 第3気筒(失火判定対象気筒)
♯4 第4気筒(1点火後気筒)
Claims (6)
- ロックアップクラッチを有する流体式動力伝達装置を介して変速機に連結された内燃機関の回転変動量が所定の閾値を超えたときに失火が生じている可能性があると判断し、内燃機関の回転変動パターンが失火発生時に特有のパターンであるか否かを判定することによって失火判定を行う内燃機関の失火判定装置において、
上記ロックアップクラッチの非ロックアップ状態において、内燃機関の回転変動パターンが、非ロックアップ状態での失火発生時に特有の第1の回転変動パターンに沿っているか否かによって失火判定動作を行うと共に、上記ロックアップクラッチのロックアップ状態において、内燃機関の回転変動パターンが、ロックアップ状態での失火発生時に特有の第2の回転変動パターンに沿っているか否かによって失火判定動作を行う失火判定手段を備えており、
上記第2の回転変動パターンは、第1の回転変動パターンに比べて、回転変動の変化が小さいものとして規定されていることを特徴とする内燃機関の失火判定装置。 - 上記請求項1記載の内燃機関の失火判定装置において、
上記失火判定手段は、ロックアップクラッチがロックアップ状態にある場合において、変速機の変速段が、上記内燃機関と変速機との共振が発生する可能性のある特定の変速段にある場合にのみ、上記第2の回転変動パターンに基づいた失火判定動作を行うよう構成されていることを特徴とする内燃機関の失火判定装置。 - 上記請求項1または2記載の内燃機関の失火判定装置において、
上記失火判定手段は、ロックアップクラッチがロックアップ状態にある場合において、内燃機関の回転変動量が所定の閾値を超えたことで失火が生じている可能性があると判断された場合に、その失火が生じている可能性があると判断された気筒が、過去の燃焼行程においても回転変動量が所定の閾値を超えていた場合に、この気筒に対する上記第2の回転変動パターンに基づいた失火判定動作を行うよう構成されていることを特徴とする内燃機関の失火判定装置。 - 上記請求項1、2または3記載の内燃機関の失火判定装置において、
上記失火判定手段は、ロックアップクラッチがロックアップ状態にある場合において、内燃機関の回転変動量が所定の閾値を超えたことで失火が生じている可能性があると判断された場合に、その失火判定対象気筒の膨張行程時における回転変動量、この失火判定対象気筒の膨張行程の直前に膨張行程を迎えていた気筒の膨張行程時における回転変動量、および、失火判定対象気筒の膨張行程の直後に膨張行程を迎えた気筒の膨張行程時における回転変動量の変化のパターンと、上記第2の回転変動パターンとを比較することで失火判定動作を行うよう構成されていることを特徴とする内燃機関の失火判定装置。 - 上記請求項1〜4のうち何れか一つに記載の内燃機関の失火判定装置において、
上記第1の回転変動パターンは、失火判定対象気筒の膨張行程の直前に膨張行程を迎えた1点火前気筒の膨張行程時における回転変動量および失火判定対象気筒の膨張行程の直後に膨張行程を迎えた1点火後気筒の膨張行程時における回転変動量に対して、失火判定対象気筒の膨張行程時における回転変動量が所定量以上大きく、且つ上記1点火後気筒の膨張行程の更に直後に膨張行程を迎えた2点火後気筒の膨張行程時における回転変動量が、上記失火判定対象気筒の膨張行程における回転変動量に対して、絶対値が略同一であって正負が逆の値となるパターンとして規定されている一方、
上記第2の回転変動パターンは、上記1点火前気筒の膨張行程時における回転変動量に対して、失火判定対象気筒の膨張行程時における回転変動量が所定量以上大きく、上記1点火後気筒の膨張行程時における回転変動量と、失火判定対象気筒の膨張行程時における回転変動量との差が所定量以下であって、且つ上記2点火後気筒の膨張行程時における回転変動量が、上記失火判定対象気筒の膨張行程における回転変動量に対して、絶対値が略同一であって正負が逆の値となるパターンとして規定されていることを特徴とする内燃機関の失火判定装置。 - 上記請求項1〜4のうち何れか一つに記載の内燃機関の失火判定装置において、
上記第1の回転変動パターンは、失火判定対象気筒の膨張行程の直前に膨張行程を迎えた1点火前気筒の膨張行程時における回転変動量および失火判定対象気筒の膨張行程の直後に膨張行程を迎えた1点火後気筒の膨張行程時における回転変動量に対して、失火判定対象気筒の膨張行程時における回転変動量が所定量以上大きく、且つ上記1点火後気筒の膨張行程の更に直後に膨張行程を迎えた2点火後気筒の膨張行程時における回転変動量が、上記失火判定対象気筒の膨張行程における回転変動量に対して、絶対値が略同一であって正負が逆の値となるパターンとして規定されている一方、
上記第2の回転変動パターンは、上記1点火前気筒の膨張行程時における回転変動量と、失火判定対象気筒の膨張行程時における回転変動量との差が所定量以下であって、上記1点火後気筒の膨張行程時における回転変動量に対して、失火判定対象気筒の膨張行程時における回転変動量が所定量以上大きく、且つ上記2点火後気筒の膨張行程時における回転変動量が、上記失火判定対象気筒の膨張行程における回転変動量に対して、絶対値が略同一であって正負が逆の値となるパターンとして規定されていることを特徴とする内燃機関の失火判定装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008181920A JP4572965B2 (ja) | 2008-07-11 | 2008-07-11 | 内燃機関の失火判定装置 |
| US12/500,018 US8281650B2 (en) | 2008-07-09 | 2009-07-09 | Misfire determination device and misfire determination method for internal combustion engine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008181920A JP4572965B2 (ja) | 2008-07-11 | 2008-07-11 | 内燃機関の失火判定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010019198A true JP2010019198A (ja) | 2010-01-28 |
| JP4572965B2 JP4572965B2 (ja) | 2010-11-04 |
Family
ID=41704346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008181920A Expired - Fee Related JP4572965B2 (ja) | 2008-07-09 | 2008-07-11 | 内燃機関の失火判定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4572965B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011163224A (ja) * | 2010-02-10 | 2011-08-25 | Mitsubishi Electric Corp | 内燃機関の失火検出装置 |
| JP2014199040A (ja) * | 2013-03-29 | 2014-10-23 | 本田技研工業株式会社 | エンジン制御装置 |
| JP2016183615A (ja) * | 2015-03-26 | 2016-10-20 | 株式会社豊田自動織機 | エンジンの点火装置 |
| JP2017172434A (ja) * | 2016-03-23 | 2017-09-28 | マツダ株式会社 | エンジンの失火判定装置 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04159438A (ja) * | 1990-10-19 | 1992-06-02 | Hitachi Ltd | 内燃機関の失火検出法 |
| JPH04171249A (ja) * | 1990-11-01 | 1992-06-18 | Nippondenso Co Ltd | 車両用内燃機関の失火検出装置 |
| JPH05180063A (ja) * | 1991-12-27 | 1993-07-20 | Honda Motor Co Ltd | 内燃エンジンの失火検出装置 |
| JPH09287516A (ja) * | 1996-04-25 | 1997-11-04 | Mitsubishi Electric Corp | 失火検出装置 |
| JPH10331707A (ja) * | 1997-05-30 | 1998-12-15 | Nissan Motor Co Ltd | エンジンの失火診断装置 |
| JP2000120488A (ja) * | 1998-10-16 | 2000-04-25 | Aisan Ind Co Ltd | 失火検出装置 |
| JP2003510502A (ja) * | 1999-09-24 | 2003-03-18 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 燃焼ミスファイヤ検出方法およびそのための電子式診断装置 |
| JP2004293350A (ja) * | 2003-03-26 | 2004-10-21 | Hitachi Ltd | 内燃機関の燃焼状態検出装置 |
| JP2006152971A (ja) * | 2004-12-01 | 2006-06-15 | Toyota Motor Corp | 内燃機関の失火判定装置 |
| JP2007198296A (ja) * | 2006-01-27 | 2007-08-09 | Toyota Motor Corp | 失火判定装置、ハイブリッド自動車及び失火判定方法 |
-
2008
- 2008-07-11 JP JP2008181920A patent/JP4572965B2/ja not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04159438A (ja) * | 1990-10-19 | 1992-06-02 | Hitachi Ltd | 内燃機関の失火検出法 |
| JPH04171249A (ja) * | 1990-11-01 | 1992-06-18 | Nippondenso Co Ltd | 車両用内燃機関の失火検出装置 |
| JPH05180063A (ja) * | 1991-12-27 | 1993-07-20 | Honda Motor Co Ltd | 内燃エンジンの失火検出装置 |
| JPH09287516A (ja) * | 1996-04-25 | 1997-11-04 | Mitsubishi Electric Corp | 失火検出装置 |
| JPH10331707A (ja) * | 1997-05-30 | 1998-12-15 | Nissan Motor Co Ltd | エンジンの失火診断装置 |
| JP2000120488A (ja) * | 1998-10-16 | 2000-04-25 | Aisan Ind Co Ltd | 失火検出装置 |
| JP2003510502A (ja) * | 1999-09-24 | 2003-03-18 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 燃焼ミスファイヤ検出方法およびそのための電子式診断装置 |
| JP2004293350A (ja) * | 2003-03-26 | 2004-10-21 | Hitachi Ltd | 内燃機関の燃焼状態検出装置 |
| JP2006152971A (ja) * | 2004-12-01 | 2006-06-15 | Toyota Motor Corp | 内燃機関の失火判定装置 |
| JP2007198296A (ja) * | 2006-01-27 | 2007-08-09 | Toyota Motor Corp | 失火判定装置、ハイブリッド自動車及び失火判定方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011163224A (ja) * | 2010-02-10 | 2011-08-25 | Mitsubishi Electric Corp | 内燃機関の失火検出装置 |
| JP2014199040A (ja) * | 2013-03-29 | 2014-10-23 | 本田技研工業株式会社 | エンジン制御装置 |
| JP2016183615A (ja) * | 2015-03-26 | 2016-10-20 | 株式会社豊田自動織機 | エンジンの点火装置 |
| JP2017172434A (ja) * | 2016-03-23 | 2017-09-28 | マツダ株式会社 | エンジンの失火判定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4572965B2 (ja) | 2010-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8281650B2 (en) | Misfire determination device and misfire determination method for internal combustion engine | |
| CN102400793B (zh) | 利用凸轮轴位置感测进行气门操作监测的发动机控制 | |
| US7562650B2 (en) | Start-up control apparatus for an internal combustion engine | |
| KR100959214B1 (ko) | 내연 기관의 실화 검출 장치 | |
| JP2006152971A (ja) | 内燃機関の失火判定装置 | |
| JP2010196810A (ja) | 車両用駆動装置の制御装置 | |
| JP4572965B2 (ja) | 内燃機関の失火判定装置 | |
| JP4577423B2 (ja) | 内燃機関の失火判定装置 | |
| JP5305043B2 (ja) | エンジンの燃焼状態検出装置 | |
| JP4872971B2 (ja) | 内燃機関の失火検出装置 | |
| US10851729B2 (en) | Determination criterion for engine torque control device and method | |
| US20170002758A1 (en) | Engine control device and engine control method | |
| JP3794197B2 (ja) | エンジンの燃料噴射制御装置 | |
| JP4572962B2 (ja) | 内燃機関の失火判定装置 | |
| JP2008286167A (ja) | 多気筒内燃機関の制御装置 | |
| JP2007107458A (ja) | 内燃機関の制御装置 | |
| JP2013117206A (ja) | 車両用内燃機関の制御装置 | |
| US8423227B2 (en) | Monitoring apparatus and method | |
| JP2010007616A (ja) | 内燃機関の制御装置 | |
| JP4949491B2 (ja) | 内燃機関の失火検出装置 | |
| JP5790594B2 (ja) | 内燃機関のラフアイドル検出装置 | |
| JP2007154707A (ja) | 変速機搭載車用内燃機関の制御装置 | |
| JP5488142B2 (ja) | 車両の制御装置 | |
| JP2007009749A (ja) | 変速機搭載車用内燃機関の制御装置 | |
| JP5803787B2 (ja) | 内燃機関の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100511 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100621 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20100621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100720 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100802 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4572965 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130827 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |