JP2010017602A - 脈拍計、制御プログラムおよび記録媒体 - Google Patents
脈拍計、制御プログラムおよび記録媒体 Download PDFInfo
- Publication number
- JP2010017602A JP2010017602A JP2009249978A JP2009249978A JP2010017602A JP 2010017602 A JP2010017602 A JP 2010017602A JP 2009249978 A JP2009249978 A JP 2009249978A JP 2009249978 A JP2009249978 A JP 2009249978A JP 2010017602 A JP2010017602 A JP 2010017602A
- Authority
- JP
- Japan
- Prior art keywords
- pulse
- body motion
- pulse wave
- motion component
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 194
- 238000004458 analytical method Methods 0.000 claims description 55
- 230000003044 adaptive effect Effects 0.000 claims description 25
- 238000000034 method Methods 0.000 claims description 19
- 230000008569 process Effects 0.000 claims description 12
- 238000004364 calculation method Methods 0.000 claims description 11
- 230000001133 acceleration Effects 0.000 claims description 9
- 238000012545 processing Methods 0.000 claims description 9
- 238000012937 correction Methods 0.000 claims description 6
- 230000000737 periodic effect Effects 0.000 abstract description 3
- 238000010586 diagram Methods 0.000 description 25
- 230000008859 change Effects 0.000 description 22
- 238000012986 modification Methods 0.000 description 22
- 230000004048 modification Effects 0.000 description 22
- 230000015572 biosynthetic process Effects 0.000 description 14
- 238000003786 synthesis reaction Methods 0.000 description 14
- 210000003462 vein Anatomy 0.000 description 14
- 239000003990 capacitor Substances 0.000 description 11
- 230000006870 function Effects 0.000 description 9
- 238000009532 heart rate measurement Methods 0.000 description 9
- 239000008280 blood Substances 0.000 description 8
- 210000004369 blood Anatomy 0.000 description 8
- 238000001228 spectrum Methods 0.000 description 8
- 230000003321 amplification Effects 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 6
- 238000003199 nucleic acid amplification method Methods 0.000 description 6
- 238000005070 sampling Methods 0.000 description 6
- 210000000707 wrist Anatomy 0.000 description 6
- 239000011521 glass Substances 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 4
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- 230000036772 blood pressure Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- CXOZQHPXKPDQGT-UHFFFAOYSA-N CC1C=CCC1 Chemical compound CC1C=CCC1 CXOZQHPXKPDQGT-UHFFFAOYSA-N 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 210000000323 shoulder joint Anatomy 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images





































Landscapes
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
Abstract
【解決手段】脈波検出部は、脈波センサ83を有し、脈波検出信号をMPU94に出力する。MPU94は、装着者の心臓の位置と、当該脈拍計の装着位置との高さ方向の相対的な差に基づいて脈波検出信号に含まれる体動成分を除去し、体動成分除去後の脈波検出信号に基づいて脈拍数を検出する。
【選択図】図4
Description
上記特許文献1に開示されている脈拍計は、加速度センサにより検出した体動信号の周波数分析結果に基づいて体動信号の高調波成分のすべてに相当する周波数成分を脈波信号の周波数分析結果から除去し、体動信号の高調波成分が除去された脈波信号の周波数分析結果のなかから最大のパワーを有する周波数成分を抽出し、当該抽出した周波数成分に基づいて脈拍数を算出するという構成を採っていた。
従来は体動成分を完全に把握できないため、脈拍センサ信号に含まれる体動成分を除去するために周波数分析結果の高調波成分の特徴を利用して体動信号を特定し、特定した体動信号を除去して脈波信号を抽出しているため、体動が周期的な特性を有していない場合には、体動成分を除去することができず、ひいては、脈拍を正しく求める事ができないという問題点があった。
そこで、本発明の目的は、脈拍センサ信号に含まれる体動成分をより正確に把握することにより、体動成分が周期的な特性を有していない場合であっても、脈波成分から生体内部で発生する体動成分を確実に除去して正確に脈拍数算出を行うことができる脈拍計、脈拍計の制御方法、腕時計型情報機器、制御プログラム、記録媒体、血管模擬センサおよび生体情報計測装置を提供することにある。
上記構成によれば、脈波検出部は、脈波センサを有し、脈波検出信号を出力する。
体動成分除去部は、装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づいて脈波検出信号に含まれる体動成分を除去する。
これにより脈拍数算出部は、体動成分除去後の脈波検出信号に基づいて脈拍数を算出する。
この場合において、前記体動成分除去部は、前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差の関数として表される体動成分を検出し、体動検出信号を出力する体動検出部を備えるようにしてもよい。
また、前記体動検出部は、前記体動成分を検出する圧力センサを備えてもよい。
さらに、前記圧力センサは、前記脈波センサの近傍に配置されているようにしてもよい。
また、前記圧力センサは、前記脈波センサに略積層状態で配置されているようにしてもよい。
また、前記差検出部は、前記高さ方向の相対的な差として当該脈拍計の基準角度に対する実際の配置状態における角度差を検出する角度センサを備えるようにしてもよい。
さらに、前記角度センサは、前記脈波センサの近傍に配置されているようにしてもよい。
また、前記角度センサは、前記脈波センサに略積層状態で配置されているようにしてもよい。
さらにまた、前記角度センサは、静止加速度に基づいて前記角度差を検出するようにしてもよい。
また、前記角度センサは、回転錘を有し、前記回転錘の回転状態に基づいて前記角度差を検出するようにしてもよい。
さらにまた、前記体動成分除去部は、前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づく前記体動成分に対応する体動成分検出信号を前記脈波検出信号から減算する除去処理部を備えるようにしてもよい。
また、前記体動成分除去部は、前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づく前記体動成分に対応する体動成分検出信号を周波数分析し第1周波数分析データを生成する第1周波数分析部と、前記脈波検出信号を周波数分析し第2周波数分析データを生成する第2周波数分析部と、前記第2周波数分析データに対する前記第1周波数分析データの減算処理を行う除去処理部を備えるようにしてもよい。
さらに、前記体動成分除去部は、前記脈波検出信号および前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づく前記体動成分に対応する体動成分検出信号に基づいて適応フィルタ係数を生成するフィルタ係数生成部と、前記脈波検出信号から前記適応フィルタ係数を適用した前記体動成分検出信号を減算する除去処理部と、を備えるようにしてもよい。
また、脈波センサを有し、脈波信号を出力する脈波検出部を備えた脈拍計の制御方法は、装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づいて前記脈波検出信号に含まれる体動成分を除去する体動成分除去過程と、前記体動成分除去後の前記脈波検出信号に基づいて脈拍数を算出する脈拍数算出過程と、を備えたことを特徴としている。
上記構成によれば、装置本体部の体動成分除去部は、装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づいて脈波検出信号に含まれる体動成分を除去する。これにより脈拍算出部は、体動成分除去後の脈波検出信号に基づいて脈拍数を算出し、表示部は、脈拍数を表示する。
さらに上記制御プログラムをコンピュータ読取可能な記録媒体に記録するようにしてもよい。
[1]第1実施形態
[1.1]原理
まず、第1実施形態の具体的説明に先立ち、第1実施形態の動作原理を説明する。
脈波を検出するための脈波センサの出力には、脈波成分に加えて様々な体動成分が含まれている。この体動成分は、脈拍被測定者であるユーザの運動(歩行・走行動作、腕の振りなど)に起因する、生体内部の変化により発生するものであることが知られている。
従って、体動成分を検出するセンサとして加速度センサを用いた場合には、ユーザの運動を検出することができるが、脈波センサの出力に含まれる体動成分は、その運動に起因する生体内部の変化により発生するものであり、脈波センサの出力に含まれる真の体動成分については、正確に検出することは困難である。
一方、生体内部で発生する体動成分として、脈波センサとして用いる光センサに最も影響を与えるものとしては、静脈血の影響を無視することはできない。
これに伴い、発明者らは同一の体動成分を発生させた場合の体表面の圧力変化量と脈波センサの出力に含まれる体動成分量(ストローク成分量)との関係を調べた。
図1は圧力変化量と脈波センサの出力に含まれる体動成分量(ストローク成分量)との関係説明図である。
図1に示すように、圧力変化量と脈波センサの出力に含まれる体動成分量(ストローク成分量)とは、略比例関係を有していることがわかった。
これは、換言すれば、体表面の圧力変化量を検出できれば、脈波センサの出力に含まれている静脈血の影響量を推し量ることができるということである。
そこで、本第1実施形態においては、静脈の膨張、すなわち、静脈起因の体動成分を外部の圧力センサにより検出するとともに、これを脈波センサの出力から所定割合で差し引くことにより、静脈血の影響を除去した信号に基づいて正確に脈拍数を検出するようにしている。
次に第1実施形態について詳細に説明する。
図2は、第1実施形態の脈拍測定システムの概要構成図である。
脈拍測定装置80は、大別すると、ユーザの指に装着されるセンサモジュール81と、センサモジュール81と配線Lを介して接続され、ユーザの腕に装着される装置本体82と、を備えている。
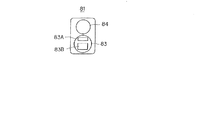
図3はセンサモジュールにおける各センサの配置例の説明図である。
センサモジュールは、大別すると、主として脈波成分を検出する脈波センサ83と、主として体動成分を検出する圧力センサとして構成された体動センサ84と、を備えて構成されている。
ここで、脈波センサ83は、検出用光を射出するLED83Aと、人体により反射された検出用光を受光するPD(Photo Detector)83Bと、を備えている。
図4は、脈拍測定装置の概要構成ブロック図である。
脈拍測定装置80は、大別すると、前述した脈波センサ83および体動センサ84に加えて、脈波信号増幅回路91と、体動信号増幅回路92と、A/D変換回路93と、MPU94と、RAM95と、ROM96と、液晶表示装置などの表示装置97と、を備えている。
脈波信号増幅回路91は、脈波センサ83から出力される脈波検出信号を所定増幅率で増幅して増幅脈波検出信号としてA/D変換回路93に出力する。
体動信号増幅回路92は、体動センサ84から出力される圧力検出信号を所定増幅率で増幅して増幅圧力検出信号としてA/D変換回路93に出力する。
A/D変換回路93は、入力された増幅脈波検出信号および増幅圧力検出信号をそれぞれ別個にアナログ/ディジタル変換して脈波検出データおよび圧力検出データとしてMPU94へ出力する。
MPU94は、脈波検出データおよび圧力検出データ(体動検出データ)をRAM95に格納するとともに、ROM96に格納された制御プログラムに基づいて脈拍数を算出し、表示装置97に表示することとなる。
より詳細には、MPU24は、RAM25に格納した脈波検出データおよび圧力検出データ(体動検出データ)を時系列順に並べ、対応するサンプリングタイミング毎に脈波検出データと圧力検出データとの両者の差である差データを求める。
そして残差データの周波数分析(FFT:Fast Fourier Transformation)を行って、脈波の高調波成分を抽出し、その周波数から脈拍数を算出することとなる。
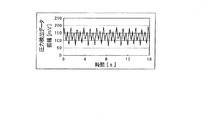
図5は、脈波検出データの一例を時系列順に並べてグラフ化したものである。
また、図6は図5の脈波検出データに対応する圧力検出データを同一の時間軸で時系列順に並べてグラフ化したものである。
まず、MPU94は、RAM95に格納した脈波検出データおよび圧力検出データを順次読み出し、あるサンプリングタイミングにおける脈波検出データから同一サンプリングタイミングの圧力検出データを差し引くことにより差データを算出する。
図7は、図5の脈波検出データおよび図6の圧力検出データから算出した差データを時系列順に並べてグラフ化したものである。
次にMPU94は、差データに対しFFTを施す。
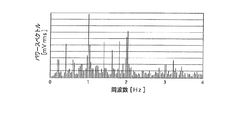
図8は、図7の差データにFFTを施して得られた周波数分析結果である。
これにより、得られた周波数分析結果は、実質的に脈波センサの出力信号(脈波成分+体動成分)から、静脈起因の体動成分を除去したもの、すなわち、主として脈波成分に対応する脈波データとなる。
さらにMPU94は、得られた脈波データから最大の周波数成分を脈拍スペクトルとして、その周波数から脈拍数を算出する。
そしてMPU94は、表示装置27に脈拍数を表示することとなる。
以上の説明のように、本第1実施形態によれば、生体内部で発生する体動成分の主要因である静脈の変動を圧力センサを用いて確実に検出して把握できる。このため、体動成分を確実に除去でき、正確な脈波成分検出、ひいては、正確な脈拍数の測定が行える。
次に第1実施形態の第1変形例について説明する。
以上の説明においては、脈波検出データから圧力検出データを周波数分析(FFT)を行う前に差し引いて差データを算出する構成としていたが、本第1変形例は、脈波検出データおよび圧力検出データを周波数分析を行ってから、差データを算出する場合の変形例である。以下、第1変形例について説明する。
本第1変形例においては、MPU94は、RAM95に格納した脈波検出データおよび圧力検出データ(体動検出データ)のそれぞれについて周波数分析(FFT)を行う。
次にMPU94は、周波数分析後の脈波検出データと周波数分析後の圧力検出データとの差である差データを求める。
そして得られた差データから脈波の高調波成分を抽出し、その周波数から脈拍数を算出することとなる。
図9は、脈波検出データの周波数分析結果の説明図である。
また、図10は圧力検出データの周波数分析結果の説明図である。
まず、MPU94は、RAM95に格納した脈波検出データおよび圧力検出データをそれぞれ順次読み出し、FFTを施して周波数分析を行う。
図11は、周波数分析後の脈波検出データと周波数分析後の圧力検出データとの差である差データの説明図である。
次にMPU94は、周波数分析後の脈波検出データと周波数分析後の圧力検出データとを比較し、同一の周波数成分の差を求めて差データを生成する。
これにより、得られた差データとしての周波数分析結果は、実質的に脈波センサの出力信号(脈波成分+体動成分)から、静脈起因の体動成分を除去したもの、すなわち、主として脈波成分に対応する脈波データとなる。
さらにMPU94は、得られた脈波データから最大の周波数成分を脈拍スペクトルとして、その周波数から脈拍数を算出する。
そしてMPU94は、表示装置97に脈拍数を表示することとなる。
以上の説明のように、本第1実施形態の第1変形例によっても、生体内部で発生する体動成分の主要因である静脈の変動を確実に検出して把握できる。このため、体動成分を確実に除去でき、正確な脈波成分検出、ひいては、正確な脈拍数の測定が行える。
次に第1実施形態の第2変形例について説明する。
以上の説明においては、脈波検出データから圧力検出データを周波数分析(FFT)を行う前あるいは行った後に差し引いて差データを算出する構成としていたが、本第2変形例は、適応フィルタを用いて脈波検出データから体動成分を除去する場合の変形例である。
図12に適応フィルタの一例の概要構成ブロック図を示す。
適応フィルタ100は、大別するとフィルタ係数生成部101と、合成部102と、を備えている。
フィルタ係数生成部101は、体動成分除去部として機能しており、合成部102が前回出力したフィルタ適用後のデータに基づいて適応フィルタ係数hを生成する。そして入力された体動成分検出信号として機能する圧力検出データ(=k(n))に適応フィルタ係数hを適用して体動除去データ(=h・k(n))を生成して合成部102に出力する。
合成部102は、除去処理部として機能しており、前回抽出した脈波検出データ(=脈波成分+体動成分)と体動除去データを合成し、今回の脈波検出データに含まれる体動成分を実質的に除去(減算)して、脈波成分を抽出する。
図13は、脈波検出データの一例を時系列順に並べてグラフ化したものである。
また、図14は図13の脈波検出データに対応する圧力検出データを同一の時間軸で時系列順に並べてグラフ化したものである。
まず、MPU94は、RAM95に格納した脈波検出データおよび圧力検出データを順次読み出し、一つのサンプリングタイミングにおける脈波検出データを合成部102に出力する。
また、MPU94は、合成部102に出力した脈波検出データに対応する圧力検出データをフィルタ係数生成部101に出力する。
これによりフィルタ係数生成部101は、合成部102が前回出力したフィルタ適用後のデータに基づいて適応フィルタ係数hを生成する。そして入力された体動成分検出信号として機能する圧力検出データ(=k(n))に適応フィルタ係数hを適用して体動除去データ(=h・k(n))を合成部102に出力する。
これにより合成部102は、今回の脈波データと体動除去データとを合成して、今回の脈波検出データに含まれる体動成分を実質的に除去(減算)して、脈波成分を抽出して残差データ(=フィルタ適用後のデータ)を出力する。
図15は、図13の脈波検出データおよび図14の圧力検出データに対して適応フィルタを適用して得られた残差データを時系列順に並べてグラフ化したものである。
図16は、図15の残差データにFFTを施して得られた周波数分析結果である。
これにより、得られた周波数分析結果は、実質的に脈波センサの出力信号(脈波成分+体動成分)から、静脈起因の体動成分を除去したもの、すなわち、主として脈波成分に対応する脈波データとなる。
さらにMPU94は、主として脈波成分を含む、得られた脈波データから最大の周波数成分を脈拍スペクトルとして、その周波数から脈拍数を算出する。
そしてMPU94は、表示装置97に脈拍数を表示することとなる。
以上の説明のように、本第1実施形態の第2変形例によっても、生体内部で発生する体動成分の主要因である静脈の変動を確実に検出して把握できる。このため、体動成分を確実に除去でき、正確な脈波成分検出、ひいては、正確な脈拍数の測定が行える。
次に本第1実施形態の第3変形例について説明する。
以上の説明においては、センサモジュールが脈波センサおよび圧力センサの双方を備えている場合であったが、本第3変形例は、センサモジュールを二つに分けて脈波センサと圧力センサとを別個の指に装着する場合の変形例である。
図17は、第1実施形態の第3変形例の脈拍測定システムの概要構成図である。
脈拍測定装置110は、大別すると、ユーザの第1の指に装着されるセンサモジュール111Aと、ユーザの第2の指に装着されるセンサモジュール111Bと、センサモジュール111Aと配線L1を介して接続され、センサモジュール111Bと配線L2を介して接続され、ユーザの腕に装着される装置本体112と、を備えている。
センサモジュール11Aは、主として体動成分を検出する圧力センサ84を備えている。
図19は、センサモジュール111Bにおけるセンサの配置例の説明図である。
センサモジュール111Bは、主として脈波成分を検出する脈波センサ13を備えており、脈波センサ83は、検出用光を射出するLED83Aと、人体により反射された検出用光を受光するPD(Photo Detector)83Bと、を備えている。
実際の検出動作については、上述した第1実施形態の場合と同様であるので、その詳細な説明は省略する。
本第3変形例によれば、主として体動成分を検出する圧力センサ84と主として脈波成分を検出する脈波センサ83とをそれぞれ別個の指に装着して計測を行うので、他方のセンサの機械的配置の影響や他方のセンサの出力信号に起因する出力信号へのノイズの影響などを低減することが可能となる。
[2.1]原理
まず、第2実施形態の具体的説明に先立ち、第2実施形態の動作原理を説明する。
上記第1実施形態は、静脈血に起因する体動成分を検出するために、静脈血の圧力を圧力センサにより検出する構成としていた。しかしながら、本第2実施形態は、ユーザの心臓の位置と脈拍計の装着位置との高さ方向の相対的な差が静脈計の圧力と比例関係にあることに着目した実施形態である。すなわち、本第2実施形態は、ユーザの心臓の位置と脈拍計の装着位置との高さ方向の相対的な差を脈拍計を装着した腕の肩関節を中心とする角度(例えば、腕を真下に下げた場合を0゜、腕を水平にした場合を90゜とする。)として検出する場合の実施形態である。
これに伴い、発明者らは同一の体動成分を発生させた場合の(腕の)高さ変化量と脈波センサの出力に含まれる体動成分量(ストローク成分量)との関係を調べた。
図20に示すように、高さ変化量と脈波センサの出力に含まれる体動成分量(ストローク成分量)とは、略比例関係を有していることがわかった。
これは、換言すれば、腕の高さ変化量を検出できれば、脈波センサの出力に含まれている静脈血の影響量を推し量ることができるということである。
図21は腕の角度と方向との関係の説明図である。
本第1実施形態においては、腕を真下に下げた場合を腕の角度=0゜、方向=下、腕を水平にした場合を腕の角度=90゜、方向=中、腕を真上に上げた場合を腕の角度=180゜、方向=上と定める。
図22は、初期状態における腕の位置(腕の方向)において腕の位置の高さ変化量と角度センサの出力としての体動成分量(ストローク成分量)との関係説明図である。
図22に示すように、初期状態における腕の高さ方向の位置がユーザの心臓の位置以下の場合、すなわち、腕の方向が下から中である場合には、腕の位置の高さを変化させたとしても、いずれの腕の方向であっても、角度センサの出力である体動成分量(ストローク成分量)の変化は同一の傾向を示すことがわかった。
一方、初期状態における腕の高さ方向の位置がユーザの心臓の位置よりも高い場合、すなわち、腕の方向が斜め上から上である場合には、静脈血の圧力低下に伴って、角度センサの出力としての体動成分量(ストローク成分量)が全体的に低下する傾向にあることがわかる。
図23に示すように、腕の角度が90゜より高い場合には、角度センサの出力としての体動成分量が小さく検出されることがわかる。
これらの結果より、腕の角度が90゜より高い場合には、角度センサの出力を補正することとした。
図24は、初期状態における腕の位置(腕の方向)において腕の位置の高さ変化量と補正後の角度センサの出力に含まれる体動成分量(ストローク成分量)との関係説明図である。
この場合において、図22の例の場合には、腕の角度が90゜より大きい場合に次式により角度センサの出力に対応する体動成分量(ストローク成分量)Yを腕の角度Xにより補正した。
ここで、y:高さ変化量(mV)
X:角度(度)
Y:補正後の高さ変化量(mV)
である。
そこで、本第2実施形態においては、ユーザの心臓の位置と脈拍計の装着位置との高さ方向の相対的な差を外部の角度センサにより検出し、静脈起因の体動成分を脈波センサの出力から所定割合で差し引くことにより、静脈血の影響を除去した信号に基づいて正確に脈拍数を検出するようにしている。
次に第2実施形態について詳細に説明する。
図25は、第2実施形態の脈拍計を時計ケースに組み込んだ場合の断面図である。
脈拍測定装置120の時計ケース121の裏面に脈波センサ83および角度センサ122を設けた場合の例である。
図25に示すように、上述した脈波センサ83が、時計ケース121の裏面側に本体と一体になって形成されている。時計ケース121には、これを腕に装着するためのリストバンド123が設けられており、リストバンド123を手首に巻きつけて装着すると、時計ケース121の裏面側が手首の甲に密着する。
時計ケース121の裏面側には、脈波センサ83を構成する透明ガラス83Cが設けられている。この透明ガラス83Cは、裏蓋124で時計ケース121に固定されている。透明ガラス83Cは、脈波センサ83を構成するLED83AおよびPD83Bを保護するとともに、LED13Aの照射光、生体を介して得られる反射光を透過してPD83Bに入射させる。
また、時計ケース121の内部には、メイン基板126の上側にCPU等の各種IC回路が設けられており、これによってデータ処理回路127が構成される。
また、メイン基板126の裏面側には電池128が設けられており、電池128から表示装置97、メイン基板126および脈波センサ83に電源が供給されるようになっている。
メイン基板126と脈波センサ83とは、ヒートシール129によって接続されており、ヒートシール129により形成される配線によって、メイン基板126から電源が脈波センサ83および角度センサ122に供給され、メイン基板126に脈波センサ83から脈波検出信号が供給され、角度センサ122から角度検出信号が供給されるようになっている。
データ処理回路127は、脈波信号にFFT処理を施し、その処理結果を解析することにより、脈拍数HRを算出している。なお、時計ケース121の外側面には、時刻合わせや表示モードの切換などを行うための図示しないボタンスイッチが設けられている。
そして、リストバンド123を手首に巻きつけて装着すると、時計ケース121の裏面側が手首の甲に向けられる。このため、LED83Aからの光が透明ガラス83C5を介して手首の甲に照射され、その反射光がPD83Bに入射し、受光されるようになっている。
差動キャパシタ型センサ122Aは、2軸の角度センサであり、第1の感度軸LX1と、第2の感度軸LX2を有している。
差動キャパシタ型センサ122Aは、一対の固定軸131に可撓性を有する各テザー132が支持されている。そして一対のテザー132は、両側からビーム(梁)133を支持している。
各ビーム133には、側方に突設された電極133Aが設けられており、一対の固定外側電極134A、134Bに各固定外側電極134A、134Bから略同一の距離を有する位置に各固定外側電極134に対向するように保持されている。
図28は、加速度の加わった状態における差動キャパシタ型センサの一部拡大図である。
図27で示した状態において、差動キャパシタ型センサ122Aが傾けられると、テザー132が重力加速度によりたわみ、図28に示したような状態となる。
この結果、例えば、図28に示すような場合には、電極133Aと固定外側電極134Aとの距離G1は、電極133Aと固定外側電極134Bとの距離G2よりも大きくなる。すなわち、電極133Aと固定外側電極134Bとで構成されるコンデンサの容量の方が大きくなる。
従って、この容量差は、重力加速度の大きさ、すなわち、傾けた角度に比例することとなるので、容量差を計測することにより角度を検出することが可能となるのである。
また、図30は、図29の回転錘型角度センサの側面図である。
回転錘型角度センサ122Bは、大別すると、支持軸141と、支持軸141に回転可能に支持された回転錘142と、回転錘142と一体に回転されるとともに位相の異なる2種類のスリット群が形成されたスリット板143と、支持軸141を保持する固定板144と、固定板144上のスリット板143に対向する位置に配置された光学式センサユニット145と、を備えている。
上記構成により、回転錘142が角度変化により回転すると、光学式センサユニット145は、スリット群毎にスリット板143の回転量に相当するパルス数を有する角度検出信号を出力する。このとき、スリット群毎に角度検出信号の位相関係は、回転錘の回転方向で異なるため、角度の変化方向も検出することが可能となる。
図31は、脈波検出データの一例を時系列順に並べてグラフ化したものである。また、図32は図31の脈波検出データにFFTを施して得られた周波数分析結果である。図33は、角度検出データの一例を時系列順に並べてグラフ化したものである。また、図34は図33の角度検出データにFFTを施して得られた周波数分析結果である。
脈拍測定装置としての構成は、第1実施形態と同様であるので、図4の概要構成ブロック図を参照して説明する。この場合において、体動センサ84は、角度センサである。また、MPU94は、図12に示した適応フィルタの機能を実現するものとする。
まず、MPU94は、RAM95に格納した脈波検出データおよび角度検出データを順次読み出し、あるサンプリングタイミングにおける脈波検出データを合成部102に出力する。
これによりフィルタ係数生成部101は、合成部102が前回出力したフィルタ適用後のデータに基づいて適応フィルタ係数hを生成する。そして入力された体動成分検出信号として機能する角度検出データ(=k(n))に適応フィルタ係数hを適用して体動除去データ(=h・k(n))を合成部102に出力する。
これにより合成部102は、今回の脈波データと体動除去データとを合成して、今回の脈波検出データに含まれる体動成分を実質的に除去(減算)して、脈波成分を抽出して残差データ(=フィルタ適用後のデータ)を出力する。
図35は、図31の脈波検出データおよび図33の角度検出データに対して適応フィルタを適用して得られた残差データを時系列順に並べてグラフ化したものである。
次にMPU94は、図35の残差データに対しFFTを施す。
これにより、得られた周波数分析結果は、実質的に脈波センサの出力信号(脈波成分+体動成分)から、静脈起因の体動成分を除去したもの、すなわち、主として脈波成分に対応する脈波データとなる。
さらにMPU94は、主として脈波成分を含む得られた脈波データから最大の周波数成分を脈拍スペクトルSP1として、その周波数から脈拍数を算出する。
そしてMPU94は、表示装置97に脈拍数を表示することとなる。
ところで、以上の説明は、角度センサの出力を補正しない場合のものであったが、上述したように、腕の角度が90゜より高い場合には、角度センサの出力としての体動成分量が小さく検出される。このため、腕の角度が90゜より高い場合には、脈波センサの出力を補正することとする。図37は、補正後の角度検出データの一例を時系列順に並べてグラフ化したものである。また、図38は図37の補正後の角度検出データにFFTを施して得られた周波数分析結果である。
同様にMPU94は、RAM95に格納した脈波検出データおよび角度検出データを順次読み出し、あるサンプリングタイミングにおける脈波検出データを合成部102に出力し、各脈波検出データに対応する補正後の角度検出データをフィルタ係数生成部101に出力する。
図39は、図31の脈波検出データおよび図37の補正後の角度検出データに対して適応フィルタを適用して得られた残差データを時系列順に並べてグラフ化したものであり、MPU94は、この残差データに対しFFTを施す。
図40は、図39の残差データにFFTを施して得られた周波数分析結果である。
図40に示すように、得られた周波数分析結果は、図36に示した周波数分析結果と脈拍スペクトルSP1のピークの高さは変わらないものの、他のスペクトルのピークの高さが抑制され、MPU94は、より確実に脈波データから最大の周波数成分を脈拍スペクトルSP1として、その周波数から脈拍数を算出することができることがわかる。
以上の説明のように、本第2実施形態によれば、特に角度補正を行った場合に生体内部で発生する体動成分の主要因である静脈の変動をより一層確実に検出して把握できる。このため、体動成分を確実に除去でき、正確な脈波成分検出、ひいては、正確な脈拍数の測定が行える。
[4.1]第1変形例
以上の説明においては、体動センサ(圧センサあるいは角度センサ)を脈波センサの近傍あるいは別個に設けていたが、体動センサを人体から離間する方向に脈波センサに略積層状態で配置するように構成することも可能である。
[4.2]第2変形例
以上の説明においては、制御用プログラムがROM96内にあらかじめ記憶されている場合について説明したが、各種磁気ディスク、光ディスク、メモリカードなどの記録媒体に制御用プログラムをあらかじめ記録し、これらの記録媒体から読み込み、インストールするように構成することも可能である。また、通信インターフェースを設け、インターネット、LANなどのネットワークを介して制御用プログラムをダウンロードし、インストールして実行するように構成することも可能である。
Claims (20)
- 人体に装着して脈拍を計測する脈拍計において、
脈波センサを有し、脈波検出信号を出力する脈波検出部と、
装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づいて前記脈波検出信号に含まれる体動成分を除去する体動成分除去部と、
前記体動成分除去後の前記脈波検出信号に基づいて脈拍数を算出する脈拍数算出部と、
を備えたことを特徴とする脈拍計。 - 請求項1記載の脈拍計において、
前記体動成分除去部は、前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差の関数として表される体動成分を検出し、体動検出信号を出力する体動検出部を備えたことを特徴とする脈拍計。 - 請求項2記載の脈拍計において、
前記体動検出部は、前記体動成分を検出する圧力センサを備えたことを特徴とする脈拍計。 - 請求項3記載の脈拍計において、
前記圧力センサは、前記脈波センサの近傍に配置されていることを特徴とする脈拍計。 - 請求項3または請求項4記載の脈拍計において、
前記圧力センサは、前記脈波センサに略積層状態で配置されていることを特徴とする脈拍計。 - 請求項5記載の脈拍計において、
前記体動成分除去部は、前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差を検出する差検出部と、
前記差および前記脈波検出信号から前記体動成分を生成する体動成分生成部と、
を備えたことを特徴とする脈拍計。 - 請求項6記載の脈拍計において、
前記差検出部は、前記高さ方向の相対的な差として当該脈拍計の基準角度に対する実際の配置状態における角度差を検出する角度センサを備えたことを特徴とする脈拍計。 - 請求項7記載の脈拍計において、
前記角度センサは、前記脈波センサの近傍に配置されていることを特徴とする脈拍計。 - 請求項7または請求項8記載の脈拍計において、
前記角度センサは、前記脈波センサに略積層状態で配置されていることを特徴とする脈拍計。 - 請求項7ないし請求項9のいずれかに記載の脈拍計において、
前記角度センサは、静止加速度に基づいて前記角度差を検出することを特徴とする脈拍計。 - 請求項7ないし請求項9のいずれかに記載の脈拍計において、
前記角度センサは、回転錘を有し、前記回転錘の回転状態に基づいて前記角度差を検出することを特徴とする脈拍計。 - 請求項6ないし請求項11のいずれかに記載の脈拍計において、
前記差検出部は、前記角度差が前記装着者の心臓の位置に対し、当該脈拍計の装着位置がより高い位置にあると見倣される場合に、所定の前記体動成分の減衰曲線に応じて前記角度差を補正する角度差補正部を備えたことを特徴とする脈拍計。 - 請求項1ないし請求項12のいずれかに記載の脈拍計において、
前記体動成分除去部は、前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づく前記体動成分に対応する体動成分検出信号を前記脈波検出信号から減算する除去処理部を備えたことを特徴とする脈拍計。 - 請求項1ないし請求項12のいずれかに記載の脈拍計において、
前記体動成分除去部は、前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づく前記体動成分に対応する体動成分検出信号を周波数分析し第1周波数分析データを生成する第1周波数分析部と、
前記脈波検出信号を周波数分析し第2周波数分析データを生成する第2周波数分析部と、
前記第2周波数分析データに対する前記第1周波数分析データの減算処理を行う除去処理を部を備えたことを特徴とする脈拍計。 - 請求項1ないし請求項12のいずれかに記載の脈拍計において、
前記体動成分除去部は、前記脈波検出信号および前記装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づく前記体動成分に対応する体動成分検出信号に基づいて適応フィルタ係数を生成するフィルタ係数生成部と、
前記脈波検出信号から前記適応フィルタ係数を適用した前記体動成分検出信号を減算する除去処理部と、
を備えたことを特徴とする脈拍計。 - 請求項1ないし請求項15のいずれかに記載の脈拍計において、
装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づいて前記脈波検出信号に含まれる体動成分からピッチあるいは歩数を検出する体動情報検出部を備えたことを特徴とする脈拍計。 - 脈波センサを有し、脈波信号を出力する脈波検出部を備えた脈拍計の制御方法において、
装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づいて前記脈波検出信号に含まれる体動成分を除去する体動成分除去過程と、
前記体動成分除去後の前記脈波検出信号に基づいて脈拍数を算出する脈拍数算出過程と、
を備えたことを特徴とする脈拍計の制御方法。 - 身体の脈波検出位置に装着され、脈波センサを有し、脈波信号を出力する脈波検出部と、腕に装着される装置本体部と、を備えた腕時計型情報機器であって、
前記装置本体部は、装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差に基づいて前記脈波検出信号に含まれる体動成分を除去する体動成分除去部と、
前記体動成分除去後の前記脈波検出信号に基づいて脈拍数を算出する脈拍数算出部と、
前記脈拍数を表示する表示部と、
を備えたことを特徴とする腕時計型情報機器。 - 脈波センサを有し脈波信号を出力する脈波検出部と、装着者の心臓の位置と当該脈拍計の装着位置との高さ方向の相対的な差を検出し、差データとして出力する差検出部と、を備えた脈拍計をコンピュータにより制御するための制御プログラムにおいて、
前記脈波検出信号に対応する脈波成分データおよび前記差データに対応する体動成分に基づいて脈波成分から体動成分を除去させ、
前記体動成分除去後の前記脈波成分に基づいて脈拍数を算出させる、
ことを特徴とする制御プログラム。 - 請求項19記載の制御プログラムを記録したことを特徴とするコンピュータ読取可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009249978A JP5104842B2 (ja) | 2003-03-19 | 2009-10-30 | 脈拍計、制御プログラムおよび記録媒体 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003075840 | 2003-03-19 | ||
| JP2003075840 | 2003-03-19 | ||
| JP2003075839 | 2003-03-19 | ||
| JP2003075839 | 2003-03-19 | ||
| JP2009249978A JP5104842B2 (ja) | 2003-03-19 | 2009-10-30 | 脈拍計、制御プログラムおよび記録媒体 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005004116A Division JP4438629B2 (ja) | 2003-03-19 | 2005-01-11 | 脈拍計、脈拍計の制御方法、腕時計型情報機器、制御プログラムおよび記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010017602A true JP2010017602A (ja) | 2010-01-28 |
| JP5104842B2 JP5104842B2 (ja) | 2012-12-19 |
Family
ID=41703011
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009249978A Expired - Lifetime JP5104842B2 (ja) | 2003-03-19 | 2009-10-30 | 脈拍計、制御プログラムおよび記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5104842B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020137479A1 (ja) * | 2018-12-27 | 2020-07-02 | オムロンヘルスケア株式会社 | 血圧測定装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3111169A1 (en) * | 2014-02-26 | 2017-01-04 | Koninklijke Philips N.V. | Device for measuring a cycling cadence |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62133934A (ja) * | 1985-12-05 | 1987-06-17 | コーリン電子株式会社 | 血圧測定装置 |
| JPS63283625A (ja) * | 1987-05-15 | 1988-11-21 | Matsushita Electric Works Ltd | 電子血圧計 |
| JPH0523148B2 (ja) * | 1985-12-05 | 1993-03-31 | Colin Electronics | |
| JPH07116137A (ja) * | 1993-10-26 | 1995-05-09 | Seiko Epson Corp | ピッチメーカ |
| JPH08215161A (ja) * | 1995-02-16 | 1996-08-27 | Omron Corp | 電子血圧計 |
| WO1999026529A1 (fr) * | 1997-11-20 | 1999-06-03 | Seiko Epson Corporation | Appareil de diagnostic lie aux formes d'impulsion, dispositif de controle de pression arterielle, dispositif de controle de la configuration des formes d'impulsion et dispositif de controle d'effet pharmacologique |
| JP2002119488A (ja) * | 2000-10-16 | 2002-04-23 | Tanita Corp | 複合健康計測装置 |
| WO2002039893A1 (fr) * | 2000-11-14 | 2002-05-23 | Omron Corporation | Sphygmomanometre electronique |
| JP2002369805A (ja) * | 2001-06-15 | 2002-12-24 | K & S:Kk | 血圧測定装置及び血圧測定方法 |
| JP3363224B2 (ja) * | 1993-11-25 | 2003-01-08 | 松下電工株式会社 | 手首血圧計 |
| JP2003250771A (ja) * | 2002-03-04 | 2003-09-09 | Sousei Denshi:Kk | 血圧測定装置および血圧値への換算方法 |
-
2009
- 2009-10-30 JP JP2009249978A patent/JP5104842B2/ja not_active Expired - Lifetime
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62133934A (ja) * | 1985-12-05 | 1987-06-17 | コーリン電子株式会社 | 血圧測定装置 |
| JPH0523148B2 (ja) * | 1985-12-05 | 1993-03-31 | Colin Electronics | |
| JPS63283625A (ja) * | 1987-05-15 | 1988-11-21 | Matsushita Electric Works Ltd | 電子血圧計 |
| JPH07116137A (ja) * | 1993-10-26 | 1995-05-09 | Seiko Epson Corp | ピッチメーカ |
| JP3363224B2 (ja) * | 1993-11-25 | 2003-01-08 | 松下電工株式会社 | 手首血圧計 |
| JPH08215161A (ja) * | 1995-02-16 | 1996-08-27 | Omron Corp | 電子血圧計 |
| WO1999026529A1 (fr) * | 1997-11-20 | 1999-06-03 | Seiko Epson Corporation | Appareil de diagnostic lie aux formes d'impulsion, dispositif de controle de pression arterielle, dispositif de controle de la configuration des formes d'impulsion et dispositif de controle d'effet pharmacologique |
| JP2002119488A (ja) * | 2000-10-16 | 2002-04-23 | Tanita Corp | 複合健康計測装置 |
| WO2002039893A1 (fr) * | 2000-11-14 | 2002-05-23 | Omron Corporation | Sphygmomanometre electronique |
| JP2002369805A (ja) * | 2001-06-15 | 2002-12-24 | K & S:Kk | 血圧測定装置及び血圧測定方法 |
| JP2003250771A (ja) * | 2002-03-04 | 2003-09-09 | Sousei Denshi:Kk | 血圧測定装置および血圧値への換算方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020137479A1 (ja) * | 2018-12-27 | 2020-07-02 | オムロンヘルスケア株式会社 | 血圧測定装置 |
| JP2020103637A (ja) * | 2018-12-27 | 2020-07-09 | オムロンヘルスケア株式会社 | 血圧測定装置 |
| JP7237574B2 (ja) | 2018-12-27 | 2023-03-13 | オムロンヘルスケア株式会社 | 血圧測定装置 |
| US12178607B2 (en) | 2018-12-27 | 2024-12-31 | Omron Healthcare Co., Ltd. | Blood pressure measurement device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5104842B2 (ja) | 2012-12-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8303512B2 (en) | Pulse meter, method for controlling pulse meter, wristwatch-type information device, control program, storage medium, blood vessel simulation sensor, and living organism information measurement device | |
| US9039614B2 (en) | Methods, systems and devices for measuring fingertip heart rate | |
| US7212943B2 (en) | Body motion detection device, pitch meter, wristwatch-type information processing device, method for controlling thereof, control program, and storage medium | |
| Ohtaki et al. | Automatic classification of ambulatory movements and evaluation of energy consumptions utilizing accelerometers and a barometer | |
| CN100362963C (zh) | 可进行运动补偿的便携式保健监测装置及其补偿方法 | |
| JP4645259B2 (ja) | 血圧測定装置 | |
| Hsu et al. | Skin-coupled personal wearable ambulatory pulse wave velocity monitoring system using microelectromechanical sensors | |
| CN110383021A (zh) | 使用电阻式力传感器阵列的血压测量系统 | |
| US20140135594A1 (en) | Methods, Systems and Devices for Measuring Fingertip Heart Rate | |
| EP0941694A1 (en) | Reflection photodetector and biological information measuring instrument | |
| JP2017042386A (ja) | 生体情報処理システム及びプログラム | |
| WO2017199597A1 (ja) | 生体情報処理装置、生体情報処理方法、及び情報処理装置 | |
| WO2007072239A3 (en) | Apparatus for monitoring a person's heart rate and/or heart rate variation; wristwatch comprising the same | |
| CN107205640B (zh) | 用于去除生理测量结果中的伪像的设备和方法 | |
| WO2017074713A1 (en) | Non-invasive continuous blood pressure monitoring with reduced motion artifacts | |
| JP4438629B2 (ja) | 脈拍計、脈拍計の制御方法、腕時計型情報機器、制御プログラムおよび記録媒体 | |
| TWI535415B (zh) | 偵測心率的方法 | |
| EP3773157B1 (en) | Apparatus for use with a wearable cuff | |
| WO2018078983A1 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JP2001198094A (ja) | 脈拍数検出装置 | |
| CN110464316A (zh) | 血压测量装置及具有其的智能手表 | |
| JP5104842B2 (ja) | 脈拍計、制御プログラムおよび記録媒体 | |
| CN100475136C (zh) | 脉搏计及其控制方法、以及手表型信息装置 | |
| Hausamann et al. | Ecological momentary assessment of head motion: Toward normative data of head stabilization | |
| JP2017217255A (ja) | 生体情報処理装置および生体情報処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091127 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120529 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120904 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120917 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5104842 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151012 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |