JP2010014671A - 距離測定器 - Google Patents
距離測定器 Download PDFInfo
- Publication number
- JP2010014671A JP2010014671A JP2008177070A JP2008177070A JP2010014671A JP 2010014671 A JP2010014671 A JP 2010014671A JP 2008177070 A JP2008177070 A JP 2008177070A JP 2008177070 A JP2008177070 A JP 2008177070A JP 2010014671 A JP2010014671 A JP 2010014671A
- Authority
- JP
- Japan
- Prior art keywords
- rail
- base
- wheel
- measuring device
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- A Measuring Device Byusing Mechanical Method (AREA)
Abstract
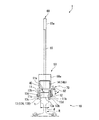
【解決手段】操作桿15が設けられレールRに沿って移動可能な基台11と、該基台11と一体となって移動し、レールRの表面上を転動可能な測定車輪40と、該測定車輪40の回転数を検出するセンサと、該センサから供給された検出信号を演算処理する演算部と該演算部の演算処理した情報を記憶する記憶部とが設けられたデータ収集器50と、該データ収集器50に対して記憶を行うように指示するスイッチ60と、前記基台11に設けられ基台11と測定点との相対的位置関係を示す指標体70とを備えることを特徴とする。
【選択図】図2
Description
距離測定器に係る解決手段として、操作桿が設けられレールに沿って移動可能な基台と、該基台と一体となって移動し、前記レールの表面上を転動可能な測定車輪と、該測定車輪の回転数を検出するセンサと、該センサから供給された検出信号を演算処理する演算部と該演算部の演算処理した情報を記憶する記憶部とが設けられたデータ収集器と、該データ収集器に対して記憶を行うように指示するスイッチと、前記基台に設けられ前記基台と測定点との相対的位置関係を示す指標体とを備える、という手段を採用する。
この発明によれば、指標体が二つの測定点のうち一方の測定点を指し示すように基台をレール上に載置させると共に操作桿を把持して基台をレールに沿って移動させて、指標体が他方の測定点を指し示したときにスイッチを入れると、二つの測定点の間における測定車輪の回転数に基づいて演算処理がなされ、この演算結果が記憶部に記憶される。すなわち、測定車輪が基台と一体となってレールの表面上を転動するので、指標体が一方の測定点から他方の測定点を指し示すまで基台を移動させると、この距離に応じて測定車輪が転動し、この測定車輪の回転数に基づいて二つの測定点間の距離を求めることができる。従って、測定のために無理な姿勢をする必要がなく、レールに沿って存在する二点間の距離の測定に伴う労力及び時間を低減させることができる。
また、例えば、マクラギの間隔を測定する場合には、各マクラギにおける同一の部分(例えば、角縁部)や各マクラギと一定の位置関係となるもの(例えば、犬くぎ)を共通の測定点に設定し、この共通の測定点を指標体が指し標したときにスイッチを押していくことで、マクラギ間隔を連続して測定していくことができる。従って、マクラギ間隔の測定に伴って測定者が無理な姿勢をとることなく、マクラギ間隔の測定に伴う労力及び時間を大幅に低減させることができる。
この発明によれば、基台を支持すると共にレール上を転動可能な走行車輪を備えるので、基台が円滑に移動する。これにより、測定車輪を安定的に転動させて二点間の距離を測定することが可能となる。
この発明によれば、測定車輪と走行車輪とが一の直線上に設けられるので、並設された左右(レール幅方向)のレールに跨って基台が載置されない。これにより、距離測定器を介して左右のレールが通電せず、軌道回路に影響を与えずに二点間の距離を測定することが可能となる。また、装置構成をコンパクトにすることができる。
この発明によれば、測定車輪が複数の走行車輪の間に設けられているので、基台がレール上を移動している時にレールと測定車輪との接触圧の変化が僅かなものとなる。これにより、測定車輪を安定的に転動させて、二点間の距離を測定することが可能となる。
この発明によれば、走行接触部が絶縁性を有するので、前後(レール長手方向)に敷設されたレール上に基台が跨ったとしても、軌道回路の絶縁区間に影響を与えることがない。これにより、導電性を有する材料で基台を構成したとしても、軌道回路に影響を与えることなく、二点間の距離を測定することが可能となる。
また、走行車輪がレールの継ぎ目部に位置したときに、走行車輪を介して前後に敷設されたレールが通電することがない。これにより、走行車輪の走行接触部以外の他の部位等に導電性を有する材料を用いたとしても、軌道回路に影響を与えることなく二点間の距離を測定することが可能となる。
この発明によれば、測定車輪がレール継ぎ目部に位置したときに、測定車輪を介して前後に敷設されたレールが通電することがない。これにより、測定車輪の走行接触部以外の他の部位等に導電性を有する材料を用いたとしても、軌道回路に影響を与えることなく二点間の距離を測定することが可能となる。
この発明によれば、押付機構を備えるので、列車の走行によってレールに緩やかな凹凸が生じていても、測定車輪が空回りすることなく、常にレール上を転動する。これにより、正確に二点間の距離を測定することが可能となる。
この発明によれば、姿勢変更機構を備え、基台に対する指標体の姿勢が変更可能となるので、様々な部位や部材等を測定点に設定することが可能となる
この発明によれば、指標体がレーザー照射器からなるので、様々な部位や部材等を測定点に設定することが可能となると共に、レーザーの照射により測定点を明確に視認することが可能となる。
この発明によれば、スイッチが操作桿に設けられているので、基台を押しつつスイッチ操作を行うことができ、二点間の距離を連続して測定することが可能となる。
図1は、本発明の実施の形態に係るマクラギ間隔測定器(距離測定器)1の正面図、図2は、側面図、図3は、図2におけるA−A線断面図である。図2に示すように、マクラギ間隔測定器1は、台車10と、距離センサ(センサ)30と(図3参照)、測定車輪40と、データ収集器50と、スイッチ60と、指標体70とから概略構成されている。
なお、以下の説明においては、台車10の進行方向(台車10を押す方向)を「前方」、台車10の進行方向の逆方向を「後方」とする。
基台11は、金属からなる三つの矩形板フレームからなり、図1及び図3に示すように、天板フレーム11aの両長縁部から側板フレーム11b、11cが略垂下するように組み合わされている。
すなわち、この走行車輪13(13A,13B)は、車輪本体13aの周面13cと、両フランジ部13bの互いに対向する内側対向面13dとをレールRに接する走行接触部としている。
この測定車輪40は、距離センサ30が押付機構81によって下方に押し下げられることで、走行車輪13(13A,13B)をレールRに載置した場合に測定車輪40の周面(測定接触部)40aがレールRの頭頂面rに押し付けられるようになっている。この周面40aには、シート状のゴム弾性体41が貼付されている。
この演算部52は、スイッチ60が押下される(後述する)と、その際に算出していた距離データを記憶部53に記憶させるようになっている。
表示部54は、液晶表示体からなり、演算部52の命令に基づいてデータ収集器50の動作状況等を表示すると共に演算部52が算出した距離データを表示する。
例えば、各マクラギMの共通の測定点を、各マクラギMの短手方向における角縁部m1,m2のうち、台車10の進行方向側に位置する角縁部m1を測定点と設定すれば、図5(a)に示すようにマクラギM1の角縁部m1にレーザーLが照射されるように指標体70の姿勢を変更する。そして、この状態でデータ収集器50の電源をオンにする。この際、基台11と指標体70が指し標す測定点との相対的位置関係が変わらないように注意する。なお、測定点を設定した後は、指標体70の姿勢は変更しない。
レールR1上の走行に際しては、走行車輪13A,13Bが基台11を確実に支持ながら転動し、走行車輪13A,13Bの間に設けられている測定車輪40がレールRの頭頂面rと略同一の接触圧で接触し、頭頂面r上を転動する。また、頭頂面rに列車の走行による凹凸が生じていても、押付機構81(図3参照)が測定車輪40を頭頂面rに押し付け、測定車輪40がレールRの頭頂面r上を安定的に転動する。
そして、レーザーLが一方の角縁部m1から他方の角縁部m1を指し示すまで台車10をレールRに沿って走行させてスイッチ60を押していくことで、マクラギ間隔を連続して測定していくことができる。従って、マクラギ間隔の測定に伴って測定者が無理な姿勢をとることなく、マクラギ間隔の測定に伴う労力及び時間を大幅に低減させることができる。
また、上述した実施の形態では、軌道回路に影響を与えることを防止するために、走行車輪13A,13Bをセラミック素材で構成したが、レールRとの接触部に絶縁材を塗布したり、測定車輪40のように絶縁シートを貼付したりしても軌道回路に影響を与えることなくマクラギ間隔を測定することができる。
同様に、測定車輪40の周面40aにゴムシート41を貼付する代わりに、絶縁材を塗布してもよいし、測定車輪40を絶縁材料で構成してもよい。
11…基台
13(13A,13B)…走行車輪
15…操作桿
30…距離センサ(センサ)
40…測定車輪
50…データ収集器
52…演算部
53…記憶部
60…スイッチ
70…指標体
81…押付機構
82…姿勢変更機構
R(R1,R2)…レール
Claims (10)
- 操作桿が設けられレールに沿って移動可能な基台と、
該基台と一体となって移動し、前記レールの表面上を転動可能な測定車輪と、
該測定車輪の回転数を検出するセンサと、
該センサから供給された検出信号を演算処理する演算部と該演算部の演算処理した情報を記憶する記憶部とが設けられたデータ収集器と、
該データ収集器に対して記憶を行うように指示するスイッチと、
前記基台に設けられ前記基台と測定点との相対的位置関係を示す指標体とを備えることを特徴とする距離測定器。 - 前記基台に設けられ、該基台を支持すると共に前記レール上を転動可能な走行車輪を備えることを特徴とする請求項1に記載の距離測定器。
- 前記測定車輪と前記走行車輪とが、前記基台の移動方向に延在する一の直線上に設けられ、
前記基台は、一のレール上を移動可能であることを特徴とする請求項2に記載の距離測定器。 - 前記走行車輪が、複数設けられ、
前記測定車輪は、前記複数の走行車輪の間に設けられていることを特徴とする請求項3に記載の距離測定器。 - 前記走行車輪は、前記レールと接触する走行接触部が絶縁性を有することを特徴とする請求項2から4のうちいずれか一項に記載の距離測定器。
- 前記測定車輪は、前記レールと接触する測定接触部が絶縁性を有することを特徴とする請求項1から5のうちいずれか一項に記載の距離測定器。
- 前記測定車輪を前記レールに押し付ける押付機構を備えることを特徴とする請求項1から6のうちいずれか一項に記載の距離測定器。
- 前記基台に設けられ、前記基台に対する前記指標体の姿勢を変更可能な姿勢変更機構を備えることを特徴とする請求項1から7のうちいずれか一項に記載の距離測定器。
- 前記指標体は、レーザー照射器からなることを特徴とする請求項1から8のうちいずれか一項に記載の距離測定器。
- 前記スイッチは、前記操作桿に設けられていることを特徴とする請求項1から9のうちいずれか一項に記載の距離測定器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008177070A JP5425422B2 (ja) | 2008-07-07 | 2008-07-07 | 距離測定器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008177070A JP5425422B2 (ja) | 2008-07-07 | 2008-07-07 | 距離測定器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010014671A true JP2010014671A (ja) | 2010-01-21 |
| JP5425422B2 JP5425422B2 (ja) | 2014-02-26 |
Family
ID=41700903
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008177070A Expired - Fee Related JP5425422B2 (ja) | 2008-07-07 | 2008-07-07 | 距離測定器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5425422B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101510003B1 (ko) | 2013-12-06 | 2015-04-07 | 한국수력원자력 주식회사 | 압력용기 노즐 용접부 결함 위치 측정장치 |
| CN115930742A (zh) * | 2023-02-21 | 2023-04-07 | 沈阳衡器制造有限公司 | 一种轨道衡安装用测量装置 |
| CN117022373A (zh) * | 2023-10-08 | 2023-11-10 | 武汉江腾铁路工程有限责任公司 | 一种铁路基础数据的测量装置 |
| CN117222587A (zh) * | 2021-03-05 | 2023-12-12 | Ltw内部物流有限责任公司 | 堆垛系统 |
| CN117222586A (zh) * | 2021-03-05 | 2023-12-12 | Ltw内部物流有限责任公司 | 堆垛系统、高层货架仓库、入库方法和出库方法 |
| KR102780099B1 (ko) * | 2023-12-27 | 2025-03-11 | 주식회사 디케이이앤에스 | 레일전용 거리측정기 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS499283U (ja) * | 1972-04-24 | 1974-01-26 | ||
| JPS6126816A (ja) * | 1984-07-17 | 1986-02-06 | Senshin Kogyo Kk | ロ−ドメジヤ− |
| JPS61262608A (ja) * | 1985-05-17 | 1986-11-20 | Kaneko Keisoku Kogyo Kk | レ−ル頭部測定器 |
| JPH0534516U (ja) * | 1991-10-11 | 1993-05-07 | 宣真工業株式会社 | カウンター式距離測定器 |
| JPH0662303U (ja) * | 1991-11-27 | 1994-09-02 | 株式会社神戸製鋼所 | レール長さ測定装置 |
-
2008
- 2008-07-07 JP JP2008177070A patent/JP5425422B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS499283U (ja) * | 1972-04-24 | 1974-01-26 | ||
| JPS6126816A (ja) * | 1984-07-17 | 1986-02-06 | Senshin Kogyo Kk | ロ−ドメジヤ− |
| JPS61262608A (ja) * | 1985-05-17 | 1986-11-20 | Kaneko Keisoku Kogyo Kk | レ−ル頭部測定器 |
| JPH0534516U (ja) * | 1991-10-11 | 1993-05-07 | 宣真工業株式会社 | カウンター式距離測定器 |
| JPH0662303U (ja) * | 1991-11-27 | 1994-09-02 | 株式会社神戸製鋼所 | レール長さ測定装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101510003B1 (ko) | 2013-12-06 | 2015-04-07 | 한국수력원자력 주식회사 | 압력용기 노즐 용접부 결함 위치 측정장치 |
| CN117222587A (zh) * | 2021-03-05 | 2023-12-12 | Ltw内部物流有限责任公司 | 堆垛系统 |
| CN117222586A (zh) * | 2021-03-05 | 2023-12-12 | Ltw内部物流有限责任公司 | 堆垛系统、高层货架仓库、入库方法和出库方法 |
| CN115930742A (zh) * | 2023-02-21 | 2023-04-07 | 沈阳衡器制造有限公司 | 一种轨道衡安装用测量装置 |
| CN115930742B (zh) * | 2023-02-21 | 2023-05-16 | 沈阳衡器制造有限公司 | 一种轨道衡安装用测量装置 |
| CN117022373A (zh) * | 2023-10-08 | 2023-11-10 | 武汉江腾铁路工程有限责任公司 | 一种铁路基础数据的测量装置 |
| CN117022373B (zh) * | 2023-10-08 | 2024-01-12 | 武汉江腾铁路工程有限责任公司 | 一种铁路基础数据的测量装置 |
| KR102780099B1 (ko) * | 2023-12-27 | 2025-03-11 | 주식회사 디케이이앤에스 | 레일전용 거리측정기 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5425422B2 (ja) | 2014-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5425422B2 (ja) | 距離測定器 | |
| JP5601697B2 (ja) | 剛体電車線測定装置 | |
| CN104890699A (zh) | 一种轨道检测仪 | |
| CN201857560U (zh) | 一种用于检测轨道平顺的小车 | |
| CN105292173A (zh) | 一种自动测量轨检车 | |
| JP7253186B2 (ja) | 軌道狂い測定装置 | |
| JP2019093928A (ja) | 軌道の線形測定システム | |
| JP5502681B2 (ja) | トングレール接触状態測定装置およびトングレール摩耗量測定装置 | |
| JP5107590B2 (ja) | 鉄道用車輪の寸法測定装置 | |
| JP2013092505A (ja) | 配管厚測定装置 | |
| CN103267499A (zh) | 一种曲板y型接头结构参数自动测量装置 | |
| CN203038545U (zh) | 新型双光栅成像仪 | |
| JP2016150686A (ja) | 軌道変位測定装置 | |
| JP2019189158A (ja) | 軌道狂い測定装置 | |
| JP3139705U (ja) | 舗装路面の平坦性測定装置 | |
| JP2019015552A (ja) | レールの波状摩耗測定装置 | |
| CN212611753U (zh) | 一种高铁轨道几何状态测量仪装置 | |
| CN217384152U (zh) | 一种轨道车辆车轮内侧距激光测量仪 | |
| RU58484U1 (ru) | Измеритель железнодорожного пути непрерывного действия | |
| CN2429410Y (zh) | 滚轮爬行式轮轨外形测量装置 | |
| JP2012087460A (ja) | 建築限界計測装置および建築限界計測方法 | |
| JP2012024891A (ja) | 筒体へのワーク挿入方法及びその装置 | |
| CN102764797B (zh) | 一种用于自由锻造时热锻件轴向尺寸定位与测量的装置 | |
| CN222251556U (zh) | 一种便携式推行数显轨距尺 | |
| RU59802U1 (ru) | Устройство для индикации волнообразного износа рельсов |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110706 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130813 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131029 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131127 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5425422 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |