JP2010014431A - 乗物に生ずる流体力を計測する方法および風洞天秤装置 - Google Patents
乗物に生ずる流体力を計測する方法および風洞天秤装置 Download PDFInfo
- Publication number
- JP2010014431A JP2010014431A JP2008172449A JP2008172449A JP2010014431A JP 2010014431 A JP2010014431 A JP 2010014431A JP 2008172449 A JP2008172449 A JP 2008172449A JP 2008172449 A JP2008172449 A JP 2008172449A JP 2010014431 A JP2010014431 A JP 2010014431A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- equation
- force
- wind tunnel
- fzi
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Aerodynamic Tests, Hydrodynamic Tests, Wind Tunnels, And Water Tanks (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
【解決手段】風洞内に設置した乗物の各車輪下部のタイヤが接触する面に設けた6分力検出器と、演算装置とを備え、車両に働く流体力である揚力,抗力,横力および偏揺(ヨーイング),横揺(ローリング),縦揺(ピッチング)の各モーメントを、風洞内で車両位置が変化しても車両の基準点の補正が可能な、所定の演算式により求める。
【選択図】なし
Description
(1)車両の設置位置が異なると、他の条件が同一であっても、計測値が異なる。
(2)通風時の空気力により車両位置が変化することがあり、この場合、計測値が大幅に変化する。
前記乗物への揚力作用方向をz、抗力および横力作用方向をx,yとする直交座標系の前記x,y,z軸方向に加わる乗物への揚力,抗力,横力をそれぞれ、[Fz],[Fx],[Fy]とし、偏揺(ヨーイング),横揺(ローリング),縦揺(ピッチング)の各モーメントをそれぞれ、[Mz],[Mx],[My]とし、
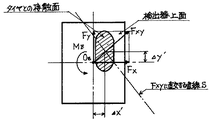
前記各多分力検出器のx,y座標における中心位置をxi,yiとし、
前記i個の車輪に対応する各多分力検出器の力およびモーメントの6分力検出値をそれぞれ、Fxi,Fyi,FziおよびMxi,Myi,Mziとしたとき、
前記乗物に生ずる流体力である前記[Fx],[Fy],[Fz]および[Mx],[My],[Mz]を、下記の演算式[数1]〜[数3]により求めることを特徴とする(請求項1の発明)。
[数1]
[Fx]=ΣFxi
[Fy]=ΣFyi
[Fz]=ΣFzi
[Mx]=ΣMxi−ΣFzi×(yi−yc)
[My]=ΣMyi+ΣFzi×(xi−xc)
[Mz]=ΣMzi+ΣFxi×(yi−yc)−ΣFyi×(xi−xc)
前記[数1]において、xcおよびycは、乗物に生ずる流体力の基準点であって、下記演算式[数2]〜[数3]により求めた値とする。
[数2]
xc=Σ(xi+Δxi)/N
yc=Σ(yi+Δyi)/N
前記[数2]において、ΔxiおよびΔyiは、各車輪に作用するFziの重心の各検出器中心からの偏心量であって、下記演算式[数3]により求めた値とする。また、車輪が4の自動車の場合には、N=4であり、i=1〜4である。2輪ないし3輪の場合には、N=2ないし3であり、i=1〜2ないし1〜3である。
[数3]
Δxi=−Myi/Fzi
Δyi=Mxi/Fzi
[数4]
[Fx]=ΣFxi´
[Fy]=ΣFyi´
[Fz]=ΣFzi´
[Mx]=ΣMxi´
[My]=ΣMyi´
[Mz]=ΣMzi´
前記[数4]において、Fxi´,Fyi´,Fzi´およびMxi´,Myi´,Mzi´は、前記Fxi,Fyi,FziおよびMxi,Myi,Mziを角度θだけ座標系を回転させてベクトル変換した値であって、下記演算式[数5]〜[数7]により求めた値とする。
[数5]
Fxi´=Fxi×cosθ−Fyi×sinθ
Fyi´=Fxi×sinθ+Fyi×cosθ
Fzi´=Fzi
Mxi´=Mxi×cosθ−Myi×sinθ
Myi´=Mxi×sinθ+Myi×cosθ
Mzi´=Mzi
前記[数5]において、角度θは、下記演算式[数6]により求めた値とする。
[数6]
θ=(tan-1θ1+tan-1θ2)/2
前記[数6]において、角度θ1およびθ2は、前記乗物の中心のx軸方向と平行な2個の多分力検出器に作用するFzの重心位置を結ぶ2個の直線と、前記乗物の中心のx軸方向とのなす各偏角であり、前記各多分力検出器のx,y座標における中心位置のxi,yiのi=1〜4の場合におけるx1〜x4およびy1〜y4、ならびに前記[数3]におけるΔxiおよびΔyiのi=1〜4の場合におけるΔx1〜Δx4およびΔy1〜Δy4を用いて、下記演算式[数7]により求めた値とする。
[数7]
tanθ1=
[(y1+Δy1)−(y3+Δy3)]/[(x1+Δx1)−(x3+Δx3)]
tanθ2=
[(y2+Δy2)−(y4+Δy4)]/[(x2+Δx2)−(x4+Δx4)]
[数8]
My=−Fz×Δx または Δx=−My/Fz
上記を、車輪が4の場合について、任意の車輪iに関して、一般化した数式にすると、これは、前記[数3]の前段の数式と同一となる。即ち、
Δxi=−Myi/Fzi ここで、i=1〜4である。
[数9]
Mx=Fz×Δy または Δy=Mx/Fz
上記を、車輪が4の場合について、任意の車輪iに関して、一般化した数式にすると、これは、前記[数3]の後段の数式と同一となる。即ち、
Δyi=Mxi/Fzi ここで、i=1〜4である。
[数10]
Mz=Fy×Δx´−Fx×Δy´
xc=Σ(xi+Δxi)/4
yc=Σ(yi+Δyi)/4
であり、i=1〜4である。
[Fx]=ΣFxi
[Fy]=ΣFyi
[Fz]=ΣFzi
[Mx]=ΣMxi−ΣFzi×(yi−yc)
[My]=ΣMyi+ΣFzi×(xi−xc)
[Mz]=ΣMzi+ΣFxi×(yi−yc)−ΣFyi×(xi−xc)
として演算できる。この演算によれば、通風時の空気力により車両位置が変化しても、その影響を受けることなく、乗物に生ずる流体力の精度の高い計測が可能となる。
[Fx]=ΣFxi´
[Fy]=ΣFyi´
[Fz]=ΣFzi´
[Mx]=ΣMxi´
[My]=ΣMyi´
[Mz]=ΣMzi´
Claims (5)
- 複数個(i個)の車輪を有する乗物を風洞内に設置し、前記i個の車輪にそれぞれ作用する力およびモーメントの6分力を検出する多分力検出器を各車輪の下部に設けて、通風時に前記乗物に生ずる流体力を計測する方法であって、
前記乗物への揚力作用方向をz、抗力および横力作用方向をx,yとする直交座標系の前記x,y,z軸方向に加わる乗物への揚力,抗力,横力をそれぞれ、[Fz],[Fx],[Fy]とし、偏揺(ヨーイング),横揺(ローリング),縦揺(ピッチング)の各モーメントをそれぞれ、[Mz],[Mx],[My]とし、
前記各多分力検出器のx,y座標における中心位置をxi,yiとし、
前記i個の車輪に対応する各多分力検出器の力およびモーメントの6分力検出値をそれぞれ、Fxi,Fyi,FziおよびMxi,Myi,Mziとしたとき、
前記乗物に生ずる流体力である前記[Fx],[Fy],[Fz]および[Mx],[My],[Mz]を、下記の演算式[数1]〜[数3]により求めることを特徴とする乗物に生ずる流体力の計測方法。
[数1]
[Fx]=ΣFxi
[Fy]=ΣFyi
[Fz]=ΣFzi
[Mx]=ΣMxi−ΣFzi×(yi−yc)
[My]=ΣMyi+ΣFzi×(xi−xc)
[Mz]=ΣMzi+ΣFxi×(yi−yc)−ΣFyi×(xi−xc)
前記[数1]において、xcおよびycは、乗物に生ずる流体力の基準点であって、下記演算式[数2]〜[数3]により求めた値とする。
[数2]
xc=Σ(xi+Δxi)/N
yc=Σ(yi+Δyi)/N
前記[数2]において、ΔxiおよびΔyiは、各車輪に作用するFziの重心の各検出器中心からの偏心量であって、下記演算式[数3]により求めた値とする。また、車輪が4の場合には、N=4であり、i=1〜4である。
[数3]
Δxi=−Myi/Fzi
Δyi=Mxi/Fzi - 請求項1に記載の乗物に生ずる流体力の計測方法を実施するための風洞天秤装置であって、風洞内に設置した乗物の各車輪の下部に設けた6分力検出器と、前記[数1]の演算を行なう演算装置とを備えることを特徴とする風洞天秤装置。
- 前記乗物は、4輪の自動車であることを特徴とする請求項2に記載の風洞天秤装置。
- 請求項1に記載の計測方法において、前記乗物に生ずる流体力の基準点xcおよびycは、前記[数2]〜[数3]により求めた値に代えて、乗物の重心点の動きをレーザ測定器で計測することにより求めた値とすることを特徴とする乗物に生ずる流体力の計測方法。
- 請求項1に記載の計測方法において、4輪の自動車の場合であって、前記多分力検出器の座標系のx軸方向と前記乗物の中心のx軸方向とが角度θだけ異なった場合に、前記演算式[数1]〜[数2]に代えて、前記乗物に生ずる流体力である前記[Fx],[Fy],[Fz]および[Mx],[My],[Mz]を、下記の演算式[数4]〜[数7]により求めることを特徴とする乗物に生ずる流体力の計測方法。
[数4]
[Fx]=ΣFxi´
[Fy]=ΣFyi´
[Fz]=ΣFzi´
[Mx]=ΣMxi´
[My]=ΣMyi´
[Mz]=ΣMzi´
前記[数4]において、Fxi´,Fyi´,Fzi´およびMxi´,Myi´,Mzi´は、前記Fxi,Fyi,FziおよびMxi,Myi,Mziを角度θだけ座標系を回転させてベクトル変換した値であって、下記演算式[数5]〜[数7]により求めた値とする。
[数5]
Fxi´=Fxi×cosθ−Fyi×sinθ
Fyi´=Fxi×sinθ+Fyi×cosθ
Fzi´=Fzi
Mxi´=Mxi×cosθ−Myi×sinθ
Myi´=Mxi×sinθ+Myi×cosθ
Mzi´=Mzi
前記[数5]において、角度θは、下記演算式[数6]により求めた値とする。
[数6]
θ=(tan-1θ1+tan-1θ2)/2
前記[数6]において、角度θ1およびθ2は、前記乗物の中心のx軸方向と平行な2個の多分力検出器に作用するFzの重心位置を結ぶ2個の直線と、前記乗物の中心のx軸方向とのなす各偏角であり、前記各多分力検出器のx,y座標における中心位置のxi,yiのi=1〜4の場合におけるx1〜x4およびy1〜y4、ならびに前記[数3]におけるΔxiおよびΔyiのi=1〜4の場合におけるΔx1〜Δx4およびΔy1〜Δy4を用いて、下記演算式[数7]により求めた値とする。
[数7]
tanθ1=
[(y1+Δy1)−(y3+Δy3)]/[(x1+Δx1)−(x3+Δx3)]
tanθ2=
[(y2+Δy2)−(y4+Δy4)]/[(x2+Δx2)−(x4+Δx4)]
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008172449A JP5230288B2 (ja) | 2008-07-01 | 2008-07-01 | 乗物に生ずる流体力を計測する方法および風洞天秤装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008172449A JP5230288B2 (ja) | 2008-07-01 | 2008-07-01 | 乗物に生ずる流体力を計測する方法および風洞天秤装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010014431A true JP2010014431A (ja) | 2010-01-21 |
| JP5230288B2 JP5230288B2 (ja) | 2013-07-10 |
Family
ID=41700686
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008172449A Active JP5230288B2 (ja) | 2008-07-01 | 2008-07-01 | 乗物に生ずる流体力を計測する方法および風洞天秤装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5230288B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014535053A (ja) * | 2011-11-02 | 2014-12-25 | エムアーハーアー アーイーペー ゲーエムベーハー ウント ツェーオー. カーゲー | 風洞天秤 |
| CN109580070A (zh) * | 2018-11-23 | 2019-04-05 | 北京航天试验技术研究所 | 一种不影响发动机轴向进气的矢量推力测量装置 |
| JP2021043152A (ja) * | 2019-09-13 | 2021-03-18 | 株式会社Subaru | 試験装置 |
| JPWO2023136179A1 (ja) * | 2022-01-13 | 2023-07-20 | ||
| WO2023136178A1 (ja) * | 2022-01-13 | 2023-07-20 | 株式会社日本風洞製作所 | 組立システム、及び風洞試験装置 |
| CN116929702A (zh) * | 2023-09-15 | 2023-10-24 | 中国人民解放军32806部队 | 一种飞行器气动特性测试天平装置与测试方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106197940B (zh) * | 2016-07-05 | 2018-04-20 | 中国空气动力研究与发展中心超高速空气动力研究所 | 一种滚转角度调节装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03137537A (ja) * | 1989-10-23 | 1991-06-12 | Chinkou Higashijima | 風胴試験における模型支持方法 |
| JP2003004598A (ja) * | 2001-04-20 | 2003-01-08 | Nissho Denki Kk | タイヤのころがり抵抗測定方法および装置 |
| JP2003035639A (ja) * | 2001-05-15 | 2003-02-07 | Nissho Denki Kk | 圧縮バネの特性試験方法および装置 |
| JP2007198964A (ja) * | 2006-01-27 | 2007-08-09 | Japan Aerospace Exploration Agency | 自動車用磁力支持天秤装置 |
-
2008
- 2008-07-01 JP JP2008172449A patent/JP5230288B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03137537A (ja) * | 1989-10-23 | 1991-06-12 | Chinkou Higashijima | 風胴試験における模型支持方法 |
| JP2003004598A (ja) * | 2001-04-20 | 2003-01-08 | Nissho Denki Kk | タイヤのころがり抵抗測定方法および装置 |
| JP2003035639A (ja) * | 2001-05-15 | 2003-02-07 | Nissho Denki Kk | 圧縮バネの特性試験方法および装置 |
| JP2007198964A (ja) * | 2006-01-27 | 2007-08-09 | Japan Aerospace Exploration Agency | 自動車用磁力支持天秤装置 |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014535053A (ja) * | 2011-11-02 | 2014-12-25 | エムアーハーアー アーイーペー ゲーエムベーハー ウント ツェーオー. カーゲー | 風洞天秤 |
| US9696237B2 (en) | 2011-11-02 | 2017-07-04 | Maha-Aip Gmbh & Co. Kg | Wind tunnel balance |
| CN109580070A (zh) * | 2018-11-23 | 2019-04-05 | 北京航天试验技术研究所 | 一种不影响发动机轴向进气的矢量推力测量装置 |
| JP2021043152A (ja) * | 2019-09-13 | 2021-03-18 | 株式会社Subaru | 試験装置 |
| JP7307637B2 (ja) | 2019-09-13 | 2023-07-12 | 株式会社Subaru | 試験装置 |
| WO2023136178A1 (ja) * | 2022-01-13 | 2023-07-20 | 株式会社日本風洞製作所 | 組立システム、及び風洞試験装置 |
| JPWO2023136179A1 (ja) * | 2022-01-13 | 2023-07-20 | ||
| WO2023136179A1 (ja) * | 2022-01-13 | 2023-07-20 | 株式会社日本風洞製作所 | 測定装置、及びこれを用いた風洞試験装置 |
| JPWO2023136178A1 (ja) * | 2022-01-13 | 2023-07-20 | ||
| JP7765786B2 (ja) | 2022-01-13 | 2025-11-07 | 株式会社日本風洞製作所 | 組立システム、及び風洞試験装置 |
| JP7765787B2 (ja) | 2022-01-13 | 2025-11-07 | 株式会社日本風洞製作所 | 測定装置、及びこれを用いた風洞試験装置 |
| CN116929702A (zh) * | 2023-09-15 | 2023-10-24 | 中国人民解放军32806部队 | 一种飞行器气动特性测试天平装置与测试方法 |
| CN116929702B (zh) * | 2023-09-15 | 2023-12-29 | 中国人民解放军32806部队 | 一种飞行器气动特性测试天平装置与测试方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5230288B2 (ja) | 2013-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5230288B2 (ja) | 乗物に生ずる流体力を計測する方法および風洞天秤装置 | |
| EP2517941B1 (en) | Roll angle estimation device and transport equipment | |
| CN100422009C (zh) | 监控被布置在轮式车辆中的测量装置的方法和设备 | |
| CN101223417B (zh) | 用于确定和校正陆上运输工具中的惯性测量单元的传感器的错误定向和偏差的方法 | |
| CN102730000B (zh) | 车辆动态质心的计算方法、横摆力矩的计算方法和系统 | |
| JP5029442B2 (ja) | 車両姿勢角推定装置及びプログラム | |
| EP3015822B1 (en) | Sensor calibration method for vehicle | |
| CN105807095A (zh) | 一种三轴加速度传感器安装误差修正方法 | |
| CN105510632A (zh) | 获取汽车加速度数据的方法与装置 | |
| JP6663006B2 (ja) | 車両の挙動検出装置 | |
| CN107702684B (zh) | 基于九轴传感器汽车前轮转向角监测方法 | |
| CN109597037A (zh) | 一种雷达标定方法及装置 | |
| CN105066988A (zh) | 一种基于高精度磁导航传感器的磁条偏差角度的测量方法 | |
| CN103852268B (zh) | 用于测试悬架动态运动学特性的系统 | |
| CN100543441C (zh) | 一种基于计算机视觉的汽车四轮定位参数检测方法 | |
| CN109421699B (zh) | 车辆侧翻预警控制方法、系统以及实施该控制方法的车辆 | |
| JP5018667B2 (ja) | 回転トルク検出装置 | |
| JP5549425B2 (ja) | 操舵操作力検出装置 | |
| JP2017116274A (ja) | 車両の操舵角加速度検出装置 | |
| CN106403933A (zh) | 一种惯性航向姿态系统的磁航向信号补偿和检测方法 | |
| CN112834784A (zh) | 车载传感器组的错误自检测方法及计算机可读存储介质 | |
| CN117719520A (zh) | 用于确定车辆的参考车速的单元和方法 | |
| JP4573617B2 (ja) | 車輪重量測定装置 | |
| CN108563143A (zh) | 基于状态观测器的四驱电动汽车速度与道路坡度估计方法 | |
| JP4694820B2 (ja) | バンク角推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110414 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130319 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160329 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5230288 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |