JP2010008089A - 荷重センサ - Google Patents
荷重センサ Download PDFInfo
- Publication number
- JP2010008089A JP2010008089A JP2008164685A JP2008164685A JP2010008089A JP 2010008089 A JP2010008089 A JP 2010008089A JP 2008164685 A JP2008164685 A JP 2008164685A JP 2008164685 A JP2008164685 A JP 2008164685A JP 2010008089 A JP2010008089 A JP 2010008089A
- Authority
- JP
- Japan
- Prior art keywords
- strain
- load sensor
- laterally
- force
- component force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
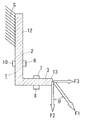
【解決手段】 本発明の荷重センサは、一端側に固定部12を有する縦起歪体2の他端側から直交方向に横起歪体3を延設するとともに該横起歪体3の先端側には外力が作用する作用部13を形成して成るL字型起歪部材1を具備する。前記縦起歪体2の表裏略同位置および前記横起歪体3の表裏略同位置には、ひずみ検知素子7,8,9,10を配置する。前記横起歪体3の作用部13に作用する外力のうち前記横起歪体3に平行な横分力と前記縦起歪体2に平行な縦分力とを、前記ひずみ検知素子7,8,9,10の検知結果に基づいて演算する。
【選択図】 図1
Description
ε2=εt1
ε3=−εb1
ε4=εb1
図4には、縦分力F2によってひずみ検知素子7が検知するひずみε1と、ひずみ検知素子8が検知するひずみε2と、ひずみ検知素子9が検知するひずみε3と、ひずみ検知素子10が検知するひずみε4を、概略的に示している。これらひずみε1,ε2,ε3,ε4はそれぞれ下記式の関係にある。なお、εt2は縦分力F2により縦起歪体2に生じる引っ張りひずみ、εb2は縦分力F2により横起歪体3に生じる曲げひずみ、εb3は縦分力F2により縦起歪体2に生じる曲げひずみである。
ε2=−εb2
ε3=−εb3+εt2
ε4=εb3+εt2
したがって、横分力F3と縦分力F2が同時に作用したとき(つまり横分力F3と縦分力F2の合力F1が作用したとき)には、各ひずみε1,ε2,ε3,ε4は下記式のようになる。
ε2=εt1−εb2
ε3=−εb1−εb3+εt2
ε4=εb1+εb3+εt2
ここで、横起歪体3の表裏で対を成すひずみ検知素子7,8の検知結果の差をとると、下記式のようになり、横分力F3の影響がなくなって縦分力F2の曲げのみが影響することがわかる。
また、縦起歪体2の表裏で対を成すひずみ検知素子9,10の検知結果の差をとると、下記式のようになり、縦分力F2と横分力F3の曲げが影響することがわかる。
=−2(εb1+εb3) ・・・(式2)
ところで、応力σ、ひずみε、曲げモーメントMの一般的関係式は、ヤング率Eと断面係数Zを用いて以下の通りに表される。
σ=M/Z ・・・(式4)
したがって、式3と式4から下記関係が得られる。
ここで、横起歪体3において縦分力F2により生じる曲げモーメントMvは、作用部13とひずみ検知素子7,8との距離Xを用いて下記式のように表される。
⇔F2=Mv/X ・・・(式6)
式1と式5を用いて式6を変形すると、以下の関係式が得られる。
=E[(ε1−ε2)/2]Z/X
=K1(ε1−ε2) ・・・(式7)
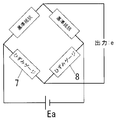
式7のK1(=E・Z/2X)はその荷重センサ固有の定数となるため、事前に実験から求めておくことができる。式7の(ε1−ε2)の値は、例えば図5に示すようなブリッジ回路を用いて求めることができる。図中ブリッジ回路の出力eは、印加電圧Eaとゲージ率Kを用いた以下の関係を満たす。
また、縦起歪体2において横分力F3と縦分力F2により生じる曲げモーメントMhは、作用部13とひずみ検知素子9,10との縦方向の距離Yと、作用部13とひずみ検知素子9,10との横方向の距離Lとを用いて、下記式のように表される。
⇔F3=(Mh−F2・L)/Y ・・・(式8)
式2と式5を用いて式8を変形すると、以下の関係式が得られる。
=[E・−(ε3−ε4)1/2・Z−F2・L]/Y
=K2・(ε3−ε4)+K3・F2 ・・・(式9)
式9のK2(=−E・Z/2Y)とK3(=−L/Y)はその荷重センサ固有の定数となるため、事前に実験から求めておくことができる。式9の(ε3−ε4)の値は、例えば図6に示すようなブリッジ回路を用いて求めることができる。図中ブリッジ回路の出力eは、印加電圧Eaとゲージ率Kを用いた以下の関係を満たす。
そして、演算装置にて式8、式9等を用いて横分力F3と縦分力F2を演算して得ることができれば、合力F1の大きさや角度θは、下記式によって求められる。
TANθ=F3/F2 ・・・(式11)
したがって、本例の荷重センサにあっては、上記の加工性が良好であって安価に提供可能な構成によって、所定平面内で作用する外力の2軸方向の分力を演算することができる。また、本例の荷重センサにあっては、更に所定平面内で作用する合力の大きさや方向を演算することができ、加工性が良好であって低価格で提供可能な角度・荷重検知センサともなる。
2 縦起歪体
3 横起歪体
7 ひずみ検知素子
8 ひずみ検知素子
9 ひずみ検知素子
10 ひずみ検知素子
12 固定部
13 作用部
15 外力作用部
F1 合力
F2 縦分力
F3 横分力
Claims (6)
- 一端側に固定部を有する縦起歪体の他端側から直交方向に横起歪体を延設するとともに該横起歪体の先端側には外力が作用する作用部を形成して成るL字型起歪部材と、前記縦起歪部の表裏略同位置および前記横起歪部の表裏略同位置に配置したひずみ検知素子と、前記横起歪体の作用部に作用する外力のうち前記横起歪体に平行な横分力と前記縦起歪体に平行な縦分力とを前記ひずみ検知素子の検知結果に基づいて演算する演算装置と、を具備することを特徴とする荷重センサ。
- 前記L字型起歪部材は、厚みが一定の板金をL字状に湾曲加工したものであることを特徴とする請求項1に記載の荷重センサ。
- 前記演算装置は、横分力と縦分力を基に合力を演算するものであることを特徴とする請求項1又は2に記載の荷重センサ。
- 前記演算装置は、横分力と縦分力を基に合力の方向を演算するものであることを特徴とする請求項1〜3のいずれか一項に記載の荷重センサ。
- 前記横起歪体の作用部には、外力を作用させるための外力作用部材を回動自在に接続させていることを特徴とする請求項1〜4のいずれか一項に記載の荷重センサ。
- 前記ひずみ検知素子は、ひずみゲージ、圧電素子または半導体素子であることを特徴とする請求項1〜5のいずれか一項に記載の荷重センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164685A JP4936193B2 (ja) | 2008-06-24 | 2008-06-24 | 荷重センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164685A JP4936193B2 (ja) | 2008-06-24 | 2008-06-24 | 荷重センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010008089A true JP2010008089A (ja) | 2010-01-14 |
| JP4936193B2 JP4936193B2 (ja) | 2012-05-23 |
Family
ID=41588790
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008164685A Expired - Fee Related JP4936193B2 (ja) | 2008-06-24 | 2008-06-24 | 荷重センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4936193B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021167750A (ja) * | 2020-04-10 | 2021-10-21 | ホシデン株式会社 | ひずみセンサモジュール |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59107220A (ja) * | 1982-12-13 | 1984-06-21 | Fukumoto Shigeru | 振動感応器 |
| JPS59204732A (ja) * | 1983-05-09 | 1984-11-20 | Tokyo Electric Co Ltd | ロ−ドセルユニツト |
| JPH01136042A (ja) * | 1987-11-20 | 1989-05-29 | Ricoh Co Ltd | 多軸力検出装置 |
| JPH01189535A (ja) * | 1988-01-22 | 1989-07-28 | Katsutoshi Kuribayashi | 歪みゲージを用いたロボットハンド用力覚センサ |
| JPH02176438A (ja) * | 1988-12-28 | 1990-07-09 | Toyota Central Res & Dev Lab Inc | 力検出装置 |
| JPH051960A (ja) * | 1990-04-05 | 1993-01-08 | Mannesmann Ag | 持上げ手段における測定装置及び測定方法 |
| JPH06308149A (ja) * | 1993-04-26 | 1994-11-04 | Murata Mfg Co Ltd | 加速度センサ |
| JP2004333147A (ja) * | 2003-04-30 | 2004-11-25 | Fuji Photo Film Co Ltd | 摩擦力測定装置 |
-
2008
- 2008-06-24 JP JP2008164685A patent/JP4936193B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59107220A (ja) * | 1982-12-13 | 1984-06-21 | Fukumoto Shigeru | 振動感応器 |
| JPS59204732A (ja) * | 1983-05-09 | 1984-11-20 | Tokyo Electric Co Ltd | ロ−ドセルユニツト |
| JPH01136042A (ja) * | 1987-11-20 | 1989-05-29 | Ricoh Co Ltd | 多軸力検出装置 |
| JPH01189535A (ja) * | 1988-01-22 | 1989-07-28 | Katsutoshi Kuribayashi | 歪みゲージを用いたロボットハンド用力覚センサ |
| JPH02176438A (ja) * | 1988-12-28 | 1990-07-09 | Toyota Central Res & Dev Lab Inc | 力検出装置 |
| JPH051960A (ja) * | 1990-04-05 | 1993-01-08 | Mannesmann Ag | 持上げ手段における測定装置及び測定方法 |
| JPH06308149A (ja) * | 1993-04-26 | 1994-11-04 | Murata Mfg Co Ltd | 加速度センサ |
| JP2004333147A (ja) * | 2003-04-30 | 2004-11-25 | Fuji Photo Film Co Ltd | 摩擦力測定装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021167750A (ja) * | 2020-04-10 | 2021-10-21 | ホシデン株式会社 | ひずみセンサモジュール |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4936193B2 (ja) | 2012-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100417927C (zh) | 六轴力传感器 | |
| US8327721B2 (en) | Sensor fabric for shape perception | |
| WO2011064339A3 (de) | Verfahren und anordnung zur taktil-optischen bestimmung der geometrie eines messobjektes | |
| JPH10332502A (ja) | 6分力ロードセル | |
| JP2012047726A5 (ja) | ||
| CN101910812A (zh) | 载荷传感器 | |
| JP4936193B2 (ja) | 荷重センサ | |
| CN202281665U (zh) | 一种悬臂梁式二维力传感器 | |
| JP2007057377A (ja) | チェーン張力測定方法 | |
| JP4877665B2 (ja) | 3軸力覚センサ | |
| EP2040051A3 (en) | Detector arrangement for electromagnetic radiation and method for measuring electromagnetic radiation | |
| JP2013064670A (ja) | 接触面形状測定装置 | |
| WO2007027212A3 (en) | Responsive structural elements | |
| KR101629843B1 (ko) | 격자형 지반 변위 측정 장치 | |
| JP2005221254A (ja) | 軸力測定器具、軸力測定装置及び軸力測定方法 | |
| CN207472462U (zh) | 一种板环结构的挂环传感器 | |
| JP2009068843A (ja) | 摩擦計測装置及び摩擦計測方法 | |
| JP5578941B2 (ja) | 3軸力センサパネル | |
| JP3760856B2 (ja) | トルク検出装置 | |
| JP6364637B2 (ja) | 荷重変換器 | |
| JP4997801B2 (ja) | サスペンション車体間入力荷重測定装置 | |
| JP2005172619A (ja) | モーメント検出装置及び多分力検出装置 | |
| Shang et al. | Theoretical analysis and simulation of thermoelastic deformation of bimorph microbeams | |
| JP2014010075A (ja) | 電流センサ | |
| JP2008067979A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100809 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111021 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111025 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111219 |
|
| TRDD | Decision of grant or rejection written | ||
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20120112 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120117 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120210 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |