JP2010005783A - 電動回転継手 - Google Patents
電動回転継手 Download PDFInfo
- Publication number
- JP2010005783A JP2010005783A JP2009112130A JP2009112130A JP2010005783A JP 2010005783 A JP2010005783 A JP 2010005783A JP 2009112130 A JP2009112130 A JP 2009112130A JP 2009112130 A JP2009112130 A JP 2009112130A JP 2010005783 A JP2010005783 A JP 2010005783A
- Authority
- JP
- Japan
- Prior art keywords
- frame
- motor
- speed reducer
- driver device
- circuit board
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000003638 chemical reducing agent Substances 0.000 claims abstract description 64
- 238000001816 cooling Methods 0.000 claims abstract description 44
- 230000009467 reduction Effects 0.000 claims description 32
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 claims description 7
- 239000003990 capacitor Substances 0.000 claims description 6
- 230000007246 mechanism Effects 0.000 claims description 6
- 238000009499 grossing Methods 0.000 claims description 5
- 230000001105 regulatory effect Effects 0.000 abstract 1
- 230000002093 peripheral effect Effects 0.000 description 18
- 230000005855 radiation Effects 0.000 description 12
- 239000011347 resin Substances 0.000 description 9
- 229920005989 resin Polymers 0.000 description 9
- 238000000465 moulding Methods 0.000 description 8
- 239000000758 substrate Substances 0.000 description 6
- 229910052782 aluminium Inorganic materials 0.000 description 4
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 230000017525 heat dissipation Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 239000012212 insulator Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000020169 heat generation Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 239000011810 insulating material Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000009423 ventilation Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 1
- 239000006247 magnetic powder Substances 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
Images













Landscapes
- Manipulator (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Motor Or Generator Cooling System (AREA)
Abstract
【解決手段】電動モータ4は、この回転軸の回転制御を行うためのドライバ装置50を有し、ドライバ装置50の少なくとも一部を第一フレーム2、または第二フレームの何れか一方に内蔵し、継手部15、並びに、第一フレーム2若しくは第二フレームに、電動モータ4を冷却するための冷却通路を設けると共に、この冷却通路の途中に軸流ファン70を設け、ドライバ装置50の少なくとも一部を軸流ファン70の空気吸入側に配置し、かつ電動モータ4を軸流ファン70の空気吐出側に配置した。
【選択図】図2
Description
ここで、この種のロボットには、内部に減速機付モータの駆動を制御するための制御用CPUやモータ駆動回路(ドライバ装置)が搭載されていることが多い。これら制御用CPUやモータ駆動回路は熱に弱いため、ロボットの外形を形成するフレーム、例えば、胴体部に制御用CPUやモータ駆動回路を集中配置し、胴体部に空気を取り込むための吸気口や胴体部内の熱を放熱するための排気口を設ける場合がある。
さらに、胴体部に制御用CPUやモータ駆動回路を集中配置しているため、胴体部が大型化するという課題がある。
このように構成することで、フレーム内部の空きスペースを有効活用しつつ1つの送風ファンでドライバ装置と減速機付モータを強制冷却することができる。
しかも、ドライバ装置と比較して発熱し易い減速機付モータを送風ファンの空気吐出側に配置する一方、ドライバ装置を送風ファンの空気吸入側に配置するので、減速機付モータに風速の速い風を吹きつけることができると共に、ドライバ装置に淀みなく新鮮な空気を当てることができる。
このように、減速機付モータのケーシングと一方のフレームとを一体成形することで、減速機付モータ全体の放熱面積を増大することができる。
また、一方のフレームに送風ファン、およびドライバ装置の少なくとも一部を内蔵することで、回転電動継手全体の小型化を図ることが可能になる。
このように構成することで、減速機付モータ全体の放熱面積をさらに増大することができる。
このように、ドライバ装置を分割構成することで、ドライバ装置のレイアウト性を向上できるので、空きスペースを有効活用することができる。
また、モータ駆動回路基板を減速機付モータ側に配置することで、モータ駆動回路基板の発熱をフレームを介して放熱させることができると共に、電源回路基板を送風ファンの空気吸入側に配置することで、電源回路基板を送風ファンを用いて強制冷却できる。
このように構成することで、送風ファンの厚さ方向を薄型化することが可能になる。
このように構成することで、フレーム内部の空きスペースを有効活用しつつ1つの送風ファンでドライバ装置と減速機付モータを強制冷却することができる。また、フレームにモータハウジングを一体成形することで、減速機付モータの放熱面積を大きくすることができる。
このように構成することで、コイルから生じる熱を主極の他に熱伝達部材を介して補極にも伝達させることができる。
このように構成することで、減速機付モータとドライバ装置の放熱面積をさらに大きくすることができる。また、確実にドライバ装置に風をあてることができる。
しかも、ドライバ装置と比較して発熱し易い減速機付モータを送風ファンの空気吐出側に配置する一方、ドライバ装置を送風ファンの空気吸入側に配置するので、減速機付モータに風速の速い風を吹きつけることができると共に、ドライバ装置に淀みなく新鮮な空気を当てることができる。
このため、省スペースながら減速機付モータを効率よく冷却できると共に、減速機付モータの近傍にドライバ装置を配置しつつドライバ装置も効率よく冷却することが可能になる。
また、一方のフレームに送風ファン、およびドライバ装置の少なくとも一部を内蔵することで、回転電動継手全体の小型化を図ることが可能になる。
また、モータ駆動回路基板を減速機付モータ側に配置することで、モータ駆動回路基板の発熱をフレームを介して放熱させることができると共に、電源回路基板を送風ファンの空気吸入側に配置することで、電源回路基板を送風ファンを用いて強制冷却できる。このため、ドライバ装置を効率よく冷却することが可能になる。
図1〜図3に示すように、電動回転継手1は、例えば、多関節型ロボットなどの産業用ロボットの関節部分に用いられるものであって、第一フレーム2と第二フレーム3とを連結する継手部15に、減速機付モータを構成する電動モータ4、および減速機6を設けている。そして、第一フレーム2と第二フレーム3とを電動モータ4、および減速機6を介して回動可能に連結している。
第一フレーム2、および第二フレーム3は、角筒状に形成されている。また、第一フレーム2、および第二フレーム3は、互いに同一直線上に並設された状態になっており、この直線に交差する軸線Jを中心に回動するようになっている。
電動モータ4は、フロントブラケット7と、リヤブラケット8と、これらフロントブラケット7、およびリヤブラケット8の内側に固定されているステータ10と、ステータ10の径方向内側に回転自在に設けられているロータ11とを有している。また、フロントブラケット7の内側に電動モータ4を駆動させるためのドライバ装置50を構成するモータ駆動回路基板51を配設し、リヤブラケット8の内側に回転軸5の回転角度を検出するためのエンコーダ40を配設している。
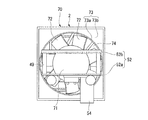
すなわち、第一フレーム2の一部がフロントブラケット7を兼ねた状態になっている。フロントブラケット7の周壁12と第一フレーム2の電動モータ4側の端面2aとの間には、複数のフィン81が軸線Jに略直交する方向に沿って立設されている。フィン81は、軸線Jに対応する位置から第一フレーム2の端面2aに至るまでフロントブラケット7の周壁12に沿うようにして形成されており、軸方向平面視略三角形状になっている。そして、フィン81は、フロントブラケット7の周壁12、および第一フレーム2と一体化されている。
このように、第一フレーム2とフロントブラケット7を一体成形することにより、恰も第一フレーム2の一部でフロントブラケット7を構成することができる。すなわち、第一フレーム2にステータ10および回転軸5を保持する機能を備えることができる。
リヤブラケット8の周壁18には、開口部側にステータ10の外周部が挿入固定されている。すなわち、ステータ10は、それぞれフロントブラケット7、およびリヤブラケット8に内嵌固定された状態になっている。なお、フロントブラケット7、およびリヤブラケット8の周壁12,18の軸方向の長さは、これらブラケット7,8内にステータ10を収納した状態で間隙が形成不可能な長さに設定されている。これによって、フロントブラケット7とリヤブラケット8との合わせ面から内部への塵埃の侵入を防止できる。
ステータ鉄心21の内周側には、複数のティース部(不図示)が径方向内側に向かって突設され、ここに絶縁材であるインシュレータ22を介して複数のコイル(不図示)が巻装されている。
スイッチング素子48は、FET(Field Effect Transistor;電界効果型トランジスタ)等のトランジスタとFET(トランジスタ)のドレイン−ソース間の逆流を防止するダイオードとをモータ駆動電源(不図示)に対して並列に接続した構成を有している。FETとしてはベアチップが用いられ、このベアチップを樹脂モールドすることによって、FETの占有スペースの縮小化を図っている。スイッチング素子48は相毎のHブリッジ回路を形成しており、それぞれオン/オフに切り換わることによって、各コイル(不図示)に供給する電流が相毎に切り換わるようになっている。
電源回路基板52の一方の基板52aには、電源平滑用のアルミ電解コンデンサ58やリード線53、および後述するフレキシブル基板54を接続するためのコネクタ部55などが実装されている。アルミ電解コンデンサ58は、不図示のモータ駆動電源に接続されており、整流された電流の中に含まれている脈流をより直流に近い状態に平滑化するための回路である。これによって、モータ駆動回路基板51のHブリッジ回路に平滑化された電流が供給可能になっている。
軸流ファン70は、軸方向中央に回転自在に支持されているファンボス71と、ファンボス71の外周面に一体成形されている複数のファンブレード72と、ファンブレード72の周囲を取り囲むように形成されたファンシュラウド73とを有している。
第一フレーム2の電動モータ4側の端面2aには、ファンシュラウド73の筒部73aに対応する開口部79が形成されている。これによって、第一フレーム2の内部の空気が軸流ファン70に吸い込まれ、開口部79を介して電動モータ4へと吐出されることになる。
ここで、フロントブラケット7の周壁12と第一フレーム2の電動モータ4側の端面2aとの間に設けられた複数のフィン81は、軸線Jに略直交する方向に沿って立設されているので、軸流ファン70による送風の流れに沿うように設けられていることになる。このため、複数のフィン81によって空気の流れが遮断されることがないようになっている。
このような構成のもと、ステータ10に巻装されているコイル(不図示)に電流が流れると磁界が形成され、この磁界とリングマグネットとの間に生じる磁気的な吸引力や反発力によって回転軸5が回転する。
エンコーダ基板30は、エンコーダ40の他方を構成するものであって、このエンコーダ基板30上には4つのホール素子41が実装されている他、回転角度検出回路(不図示)などが実装されている。
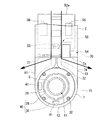
図3、図6に示すように、減速機6は、スラスト方向、およびラジアル方向の両方向の荷重を受けることのできるクロスローラベアリング61とハーモニックドライブ(登録商標)とを一体化したものである。すなわち、減速機6は、回転軸5に外嵌固定されているウェーブジェネレータ62と、このウェーブジェネレータ62の外周に配置されたフレクスプライン63とを有し、フレクスプライン63の外周にクロスローラベアリング61を配置してある。そして、クロスローラベアリング61の内輪(インナーレース)61aがハーモニックドライブ(登録商標)のサーキュラスプライン64も兼ねている。
歯車本体68はウェーブジェネレータ62によって楕円状に変形しており、この内周面は、ウェーブジェネレータ62と摺動可能に形成されている。また、歯車本体68の外周面には、歯部78が形成されている。
さらに、クロスローラベアリング61の内輪61aには、複数のボルト孔85が形成されており、ここにボルト86が螺入されることによって、クロスローラベアリング61の内輪61aが、第一フレーム2(フロントブラケット7)に締結固定される。
まず、回転軸5が例えば時計回り(図6における矢印A方向)に回転すると、この回転軸5と一体となって減速機6のウェーブジェネレータ62が回転する。
すると、フレクスプライン63の歯車本体68がウェーブジェネレータ62の回転に追随するように弾性変形し、フレクスプライン63の歯部78とサーキュラスプライン64(内輪61a)の歯部84との噛合い位置が順次移動する。
すると、フレクスプライン63の外フランジ部69にボルト76によって共締めされている第二フレーム3、およびクロスローラベアリング61の外輪61bがフレクスプライン63と一体になって反時計回りに回転する。これによって、第二フレーム3が第一フレーム2に対して軸線Jを中心に回動する。
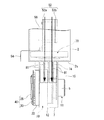
図7、図8の矢印に示すように、軸流ファン70を駆動すると、第一フレーム2内の空気が軸流ファン70に吸入され、電動モータ4側に向かって吐出される。このとき、第一フレーム2内、および継手部15は、軸流ファン70を中心にして電源回路基板52側が負圧に、電動モータ4側が正圧になっている。このため、軸流ファン70の電動モータ4側の風速は、電源回路基板52側の風速よりも速くなっている。
また、電動モータ4は大気開放されている継手部15に配置されているのに対し、電源回路基板52は、周囲が取り囲まれている第一フレーム2の内部に配置されている。このため、例え軸流ファン70の空気吸入側70aを電源回路基板52側に向けて配置したとしても電源回路基板52を冷却するのに十分な風速を得ることができる。
このモータ駆動回路基板51にあっては、放熱シート46を介してフロントブラケット7に固定されているので、モータ駆動回路基板51の熱が放熱シート46を介してフロントブラケット7、フィン81、および減速機6に伝達されることになる。このとき、フロントブラケット7、フィン81、および減速機6には、軸流ファン70から吐出された空気が吹きつけられるので、結果的にモータ駆動回路基板51も効率的に冷却される。
しかも、ドライバ装置50の電源回路基板52と比較して発熱し易い電動モータ4を軸流ファン70の空気吐出側70bに配置する一方、電源回路基板52を軸流ファン70の空気吸入側70aに配置するので、電動モータ4、および減速機6に風速の速い風を吹きつけることができると共に、電源回路基板52に淀みなく新鮮な空気を当てることができる。
このため、省スペースながら電動モータ4、および減速機6を効率よく冷却できると共に、電動モータ4の近傍にドライバ装置50を配置しつつドライバ装置50も効率よく冷却することが可能になる。
さらに、第一フレーム2に軸流ファン70、およびドライバ装置50の電源回路基板52を内蔵することで、電動回転継手1全体の小型化を図ることが可能になる。
さらに、モータ駆動回路基板51を電動モータ4側に配置することで、モータ駆動回路基板51の発熱を第一フレーム2や減速機6を介して放熱させることができると共に、電源回路基板52を軸流ファン70の空気吸入側70aに配置することで、電源回路基板52を軸流ファン70を用いて強制冷却できる。
このため、各回路基板51,52の役割に応じて効率的に冷却させることが可能になると共に、空きスペースを有効活用することができる。よって、さらに電動回転継手1の小型化を図りつつ、冷却効果を高めてモータ効率を向上させることが可能になる。
この第二実施形態において、電動回転継手91は、例えば、多関節型ロボットなどの産業用ロボットの関節部分に用いられるものであって、第一フレーム92と第二フレーム93とがそれぞれ同一直線上に並設され、継手部15を介して回動可能に連結されている点、電動モータ204と減速機6とにより減速機付モータを構成している点等の構成は、前述した第一実施形態と同様である。
ここで、図9、図10に示すように、第二実施形態では、継手部15に電動モータ204、および減速機6が設けられておらず、第一フレーム92に電動モータ204、および減速機6が設けられている。
モータハウジング99a,99bには、電動モータ204がエンコーダ40を開口部101側に向けた形で配置されている。そして、モータハウジング99a,99bに、それぞれ電動モータ204のステータ鉄心21が内嵌固定されている。このような状態で固定されている各電動モータ204は、モータハウジング99a,99bの挿通孔103を介して突出している回転軸5の一端に、減速機6が取り付けられるようになっている。
主極112、および補極113は、それぞれ軸方向平面視で略T字状に形成されている。主極112は、ステータ鉄心21に対して軸方向に沿って着脱自在に設けられている一方、補極113は、ステータ鉄心21に一体成形されている。すなわち、ステータ鉄心21の主極112に対応する箇所には、軸方向に沿って蟻溝115が形成されている一方、主極112の基端には、蟻溝115に嵌合可能な断面略台形状の凸部116が一体成形されている。これにより、ステータ鉄心21に対して主極112が軸方向に沿って着脱自在に固定される。
ここで、主極112に巻装されたコイル114と補極113との間の空隙には、熱伝達効率の高い樹脂Pが充填されている。したがって、樹脂Pは、コイル114に密接していると共に、補極113にも密接した状態になっている。
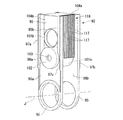
モータ駆動回路基板121は、平面視長方形状に形成されており、電動モータ4毎にそれぞれ設けられている。2つのモータ駆動回路基板121は、長手方向に並んで配置されている。これら2つのモータ駆動回路基板121によって、ヒートシンク118の上部が覆われた状態になり、一方の短辺プレート104a、複数のフィン117、およびモータ駆動回路基板121によって囲まれた通路T1が形成される。
ここで、フィン117の立ち上がり高さH1は、短辺プレート104aの短手方向両側から突出する各プレート96a,96bの高さH2よりも短く設定されている。すなわち、モータ駆動回路基板121は、ヒートシンク118と各プレート96a,96bとによって形成された収納部119に収納された状態になっている。そして、各プレート96a,96bの短辺プレート104aから突出した部位は、スイッチング素子48を保護する役割をしている。
このような構成のもと、電動モータ4を駆動すると、減速機6を構成するクロスローラベアリング61の外輪61bが回転し、不図示の連結部材を介して第二フレーム93が軸線Jを中心にして回動する。
図14、図15に示すように、電動モータ4のコイル114で生じる熱は、主極112に伝達される。また、コイル114と補極113との間の空隙に熱伝達効率の高い樹脂Pが充填されているので、樹脂Pを介して補極113に伝達される。これら主極112と補極113とに伝達された熱は、ステータ鉄心21を伝って各モータハウジング99a,99bへと伝達される。
一方、モータ駆動回路基板121に実装されているスイッチング素子48で生じる熱は、モータ駆動回路基板121を介してこれが載置されているフィン117に伝達される(図15における矢印Y1参照)。
さらに、一方の短辺プレート104a、複数のフィン117、およびモータ駆動回路基板121によって囲まれた通路T1と、ブラケット123と一方のモータハウジング99aとの間に形成される通路T2とに風を送り込めばよいので、軸流ファン124のサイズを前述の第一実施形態と比較して小型化することが可能になる。
この場合、図16、図17に示すように、電動モータ4毎に設けられている2つのモータ駆動回路基板121のうちの1つを他方の短辺プレート104b側のフィン117上に載置し、他方の短辺プレート104b、複数のフィン117、およびモータ駆動回路基板121によって囲まれた通路T1’を形成してもよい。
ブラケット133は、開口部133aを有する箱状に形成され、この開口部133aを一方のモータハウジング99a側に向けて配置する。
また、ブラケット133の底壁133bには、中央の大部分に送風口134が形成されている。送風口125には、これを閉塞するように軸流ファン124が設けられている。
したがって、各短辺プレート104a,10bに複数のフィン117を設けた場合であっても一方の短辺プレート104aのみにフィン117を設ける場合と同様の効果を奏することができる。
例えば、上述の第一実施形態では、強制冷却用のファンとして軸流ファン70を用いた場合について説明し、上述の第二実施形態では、軸流ファン124を用いた場合について説明した。しかしながら、これに限られるものではなく、軸流ファン70,124以外の他のファン、例えば、シロッコファンなどを用いてもよい。
2 第一フレーム(一方のフレーム)
3 第二フレーム(他方のフレーム)
4,204 電動モータ(減速機付モータ)
5 回転軸
6 減速機(減速機構)
7 フロントブラケット(ケーシング)
10 ステータ
11 ロータ
15 継手部
48 スイッチング素子
50,120 ドライバ装置
51,121 モータ駆動回路基板
52 電源回路基板
52a,52b 基板
58 アルミ電解コンデンサ(平滑用コンデンサ)
70 軸流ファン(送風ファン)
70a,124a 空気吸入側
70b,124b 空気吐出側
74,131 冷却通路
81 フィン
91 第一フレーム(1つのフレーム)
92 第二フレーム(他のフレーム)
96a,96b プレート
99a,99b モータハウジング(ケーシング)
104a,104b 短辺プレート(ベース部)
111 ティース部
112 主極
113 補極
114 コイル
117 フィン
118 ヒートシンク
P 樹脂(熱伝導部材)
T1,T1’,T2,T2’ 通路(冷却通路)
Claims (8)
- 一方のフレームと他方のフレームとを連結する継手部に減速機付モータを設け、前記一方のフレームと前記他方のフレームとを前記減速機付モータを介して回動自在に連結した電動回転継手において、
前記減速機付モータは、
この回転軸の回転制御を行うためのドライバ装置を有し、
前記ドライバ装置の少なくとも一部を前記一方のフレーム、または前記他方のフレームの何れか一方に内蔵し、
前記継手部、並びに、前記一方のフレーム若しくは前記他方のフレームに、前記減速機付モータを冷却するための冷却通路を設けると共に、この冷却通路の途中に送風ファンを設け、
前記ドライバ装置の少なくとも一部を前記送風ファンの空気吸入側に配置し、かつ前記減速機付モータを前記送風ファンの空気吐出側に配置したことを特徴とする電動回転継手。 - 前記一方のフレームと前記減速機付モータのケーシングとを一体成形し、
前記他方のフレームと前記減速機付モータの減速機とを連係し、
前記送風ファン、および前記ドライバ装置の少なくとも一部を前記一方のフレームに内蔵したことを特徴とする請求項1に記載の電動回転継手。 - 前記冷却通路に複数のフィンを空気の流れに沿うように設け、
前記複数のフィンを少なくとも前記減速機付モータのケーシングと一体成形したことを特徴とする請求項1に記載の電動回転継手。 - 前記ドライバ装置は、
ブリッジ回路を構成するスイッチング素子が実装されたモータ駆動回路基板と、このモータ駆動回路基板に電流を供給し、平滑用コンデンサを有する電源回路基板とを分割構成したものであって、
前記モータ駆動回路基板を前記減速機付モータ側に配置し、
前記電源回路基板を前記送風ファンの空気吸入側に配置したことを特徴とする請求項1〜請求項3の何れかに記載の電動回転継手。 - 前記送風ファンは、軸流ファンであることを特徴とする請求項1〜請求項4の何れかに記載の電動回転継手。
- 少なくとも2つのフレームを継手部を介して回動可能に連結し、前記フレームのうちの1つのフレームに減速機付モータを設け、
前記減速機付モータは、
環状のステータと、
前記ステータの径方向内側に回転自在に設けられたロータと、
前記ロータの一端側に設けられ、前記ロータの回転軸の回転速度を減速して出力する減速機構と、
前記回転軸の回転制御を行うためのドライバ装置とを有し、
前記減速機構と前記フレームのうちの他のフレームを連結することにより、前記他のフレームを前記継手部を中心にして回動させる電動回転継手であって、
前記1つのフレームに、前記減速機付モータを冷却させるための冷却通路を設け、この冷却通路の途中に前記ステータを固定するためのケーシングを一体成形すると共に、前記ドライバ装置の少なくとも一部を配置し、
前記冷却通路の一端側に送風ファンを設け、この送風ファンは、空気吐出側を前記冷却通路に向けた形で配置されていることを特徴とする電動回転継手。 - 前記ステータは、
前記ケーシングに内嵌固定される筒状のステータ鉄心と、
前記ステータ鉄心から径方向内側に向かって突設された複数のティース部とを有し、
前記ティース部は、
周方向に等間隔で配置されコイルが巻装される主極と、
前記主極間に配置され前記コイルが巻装されない補極とで構成されており、
前記コイルと前記補極との空隙に、これらコイル、および補極に接する熱伝導部材を介装したことを特徴とする請求項6に記載の電動回転継手。 - 前記ケーシングにヒートシンクを設け、
前記ヒートシンクは、
前記ケーシングに接するベース部と、
前記ベース部から立ち上がるように形成され、各々並列配置された複数のフィンとを有し、
前記複数のフィンの先端側に前記ドライバ装置の少なくとも一部を配置し、
前記ベース部、前記複数のフィン、および前記ドライバ装置の少なくとも一部で形成される通路を前記冷却通路として構成したことを特徴とする請求項6または請求項7に記載の電動回転継手。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009112130A JP5385000B2 (ja) | 2008-05-27 | 2009-05-01 | 電動回転継手 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008137670 | 2008-05-27 | ||
| JP2008137670 | 2008-05-27 | ||
| JP2009112130A JP5385000B2 (ja) | 2008-05-27 | 2009-05-01 | 電動回転継手 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010005783A true JP2010005783A (ja) | 2010-01-14 |
| JP5385000B2 JP5385000B2 (ja) | 2014-01-08 |
Family
ID=41586836
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009112130A Expired - Fee Related JP5385000B2 (ja) | 2008-05-27 | 2009-05-01 | 電動回転継手 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5385000B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012125088A (ja) * | 2010-12-10 | 2012-06-28 | Seiko Epson Corp | 電気機械装置及びロボット及び車輪 |
| JP2017039181A (ja) * | 2015-08-19 | 2017-02-23 | セイコーエプソン株式会社 | ロボット制御装置、ロボット、ロボットシステム |
| CN108032328A (zh) * | 2017-12-18 | 2018-05-15 | 深圳市优必选科技有限公司 | 一种舵机组件、机器人关节结构及机器人 |
| JP2019063935A (ja) * | 2017-09-29 | 2019-04-25 | セイコーエプソン株式会社 | ロボット |
| WO2020031482A1 (ja) * | 2018-08-09 | 2020-02-13 | 東京ロボティクス株式会社 | ロボットアーム及びロボット |
| CN114633281A (zh) * | 2022-02-28 | 2022-06-17 | 浙江大学 | 一种抗侧倾高功率密度机器人关节驱动单元 |
| JPWO2022219759A1 (ja) * | 2021-04-14 | 2022-10-20 | ||
| CN116117857A (zh) * | 2022-09-30 | 2023-05-16 | 广东天太机器人有限公司 | 机器人关节模组 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09323286A (ja) * | 1996-05-31 | 1997-12-16 | Yaskawa Electric Corp | 産業用ロボットにおける駆動用モータの冷却方法 |
| JPH10257718A (ja) * | 1997-03-13 | 1998-09-25 | Toshiba Corp | インバータ装置付きモータ |
| JP2007306741A (ja) * | 2006-05-12 | 2007-11-22 | Toshiba Corp | 制御装置一体型電動機 |
| JP2008022646A (ja) * | 2006-07-13 | 2008-01-31 | Yaskawa Electric Corp | 永久磁石型モータ用固定子、永久磁石型モータ、およびその固定子の製造方法 |
| JP2009000196A (ja) * | 2007-06-20 | 2009-01-08 | Honda Motor Co Ltd | 関節駆動型脚リンク機構及び歩行補助装置 |
-
2009
- 2009-05-01 JP JP2009112130A patent/JP5385000B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09323286A (ja) * | 1996-05-31 | 1997-12-16 | Yaskawa Electric Corp | 産業用ロボットにおける駆動用モータの冷却方法 |
| JPH10257718A (ja) * | 1997-03-13 | 1998-09-25 | Toshiba Corp | インバータ装置付きモータ |
| JP2007306741A (ja) * | 2006-05-12 | 2007-11-22 | Toshiba Corp | 制御装置一体型電動機 |
| JP2008022646A (ja) * | 2006-07-13 | 2008-01-31 | Yaskawa Electric Corp | 永久磁石型モータ用固定子、永久磁石型モータ、およびその固定子の製造方法 |
| JP2009000196A (ja) * | 2007-06-20 | 2009-01-08 | Honda Motor Co Ltd | 関節駆動型脚リンク機構及び歩行補助装置 |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012125088A (ja) * | 2010-12-10 | 2012-06-28 | Seiko Epson Corp | 電気機械装置及びロボット及び車輪 |
| JP2017039181A (ja) * | 2015-08-19 | 2017-02-23 | セイコーエプソン株式会社 | ロボット制御装置、ロボット、ロボットシステム |
| JP7130932B2 (ja) | 2017-09-29 | 2022-09-06 | セイコーエプソン株式会社 | ロボット |
| JP2019063935A (ja) * | 2017-09-29 | 2019-04-25 | セイコーエプソン株式会社 | ロボット |
| CN108032328A (zh) * | 2017-12-18 | 2018-05-15 | 深圳市优必选科技有限公司 | 一种舵机组件、机器人关节结构及机器人 |
| CN108032328B (zh) * | 2017-12-18 | 2023-08-04 | 深圳市优必选科技有限公司 | 一种舵机组件、机器人关节结构及机器人 |
| WO2020031482A1 (ja) * | 2018-08-09 | 2020-02-13 | 東京ロボティクス株式会社 | ロボットアーム及びロボット |
| JPWO2022219759A1 (ja) * | 2021-04-14 | 2022-10-20 | ||
| WO2022219759A1 (ja) * | 2021-04-14 | 2022-10-20 | 株式会社Fuji | ロボット |
| JP7720907B2 (ja) | 2021-04-14 | 2025-08-08 | 株式会社Fuji | ロボット |
| CN114633281A (zh) * | 2022-02-28 | 2022-06-17 | 浙江大学 | 一种抗侧倾高功率密度机器人关节驱动单元 |
| CN114633281B (zh) * | 2022-02-28 | 2023-12-29 | 浙江大学 | 一种抗侧倾高功率密度机器人关节驱动单元 |
| CN116117857A (zh) * | 2022-09-30 | 2023-05-16 | 广东天太机器人有限公司 | 机器人关节模组 |
| CN116117857B (zh) * | 2022-09-30 | 2023-08-15 | 广东天太机器人有限公司 | 机器人关节模组 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5385000B2 (ja) | 2014-01-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5385000B2 (ja) | 電動回転継手 | |
| US9077230B2 (en) | Electric motor with heat dissipating device | |
| US9467030B2 (en) | Air-cooled electric machine and method of assembling the same | |
| CN1913297B (zh) | 车辆用旋转电机 | |
| JP2015122856A (ja) | 回転電機一体型制御装置 | |
| JP2019531044A (ja) | 内部冷却システムを有する密閉型回転電気機械 | |
| JP7022265B2 (ja) | 真空ポンプ | |
| JP4339832B2 (ja) | 車両用回転電機 | |
| JP2006166681A (ja) | モータ制御装置 | |
| CN1244061A (zh) | 带自冷风扇的电动机 | |
| EP0244487B2 (en) | Cross-flow cooling fan device | |
| JP5373315B2 (ja) | モータ組立体およびポンプ装置 | |
| JP6560655B2 (ja) | 送風機 | |
| US11279201B2 (en) | Air cooling of the electronics of a BLDC motor | |
| JP6350651B2 (ja) | 電動機装置 | |
| JP7086238B1 (ja) | 制御装置一体型回転電機 | |
| JP2002354750A (ja) | モータ装置 | |
| JP4014101B2 (ja) | ロータファン駆動装置、及び、このロータファン駆動装置を備えた冷却装置、換気装置、吸排液装置 | |
| KR200260280Y1 (ko) | 전동기의 냉각구조 | |
| JP5402892B2 (ja) | 負荷駆動制御装置の放熱構造 | |
| KR200359518Y1 (ko) | 영구자석 모터 | |
| KR102393128B1 (ko) | 구동유닛 및 이를 포함하는 쿨링장치 | |
| JP2009207295A (ja) | 電動モータ、および電動回転継手 | |
| TW201107609A (en) | Inner-rotor type fan | |
| KR19990069019A (ko) | 냉각장치 및 이를 이용한 팬모터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130514 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130516 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131003 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5385000 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |