JP2010004696A - 出力推定装置、それを用いたモータ制御装置およびモータ制御システム - Google Patents
出力推定装置、それを用いたモータ制御装置およびモータ制御システム Download PDFInfo
- Publication number
- JP2010004696A JP2010004696A JP2008162913A JP2008162913A JP2010004696A JP 2010004696 A JP2010004696 A JP 2010004696A JP 2008162913 A JP2008162913 A JP 2008162913A JP 2008162913 A JP2008162913 A JP 2008162913A JP 2010004696 A JP2010004696 A JP 2010004696A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- output
- current
- phase
- motor current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
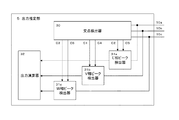
【解決手段】三相同期モータ2の少なくとも二相分のモータ電流の電流値を検出するモータ電流検出部24と、モータ電流検出部24で検出した二相分のモータ電流を用いて三相分のモータ電流を演算で求める電流演算器25と、電流演算器25で求めた三相分のモータ電流10a−10cから三相同期モータ2が出力しているトルクを推定する出力推定部5を備え、出力推定部は、電流演算器で検出した三相分のモータ電流から二相のモータ電流の交点を検出して他相のモータ電流から波高値を求め、求めた波高値を用いて三相同期モータ2の出力を推定する。
【選択図】図1
Description
とも二相分のモータ電流の電流値を検出するモータ電流検出部と、前記モータ電流検出部で検出した二相分のモータ電流を用いて三相分のモータ電流を演算で求める電流演算器と、 前記電流演算器で求めた三相分のモータ電流から前記三相同期モータが出力しているトルクまたは推力を推定する出力推定部を備え、前記出力推定部は、前記電流演算器で検出した三相分のモータ電流から二相のモータ電流の交点を検出して他相のモータ電流から波高値を求め、前記モータ電流の波高値を用いて出力を推定する。
前記モータ制御装置の外に設けた第2モータ電流検出部が検出した三相分のモータ電流から前記三相同期モータが出力しているトルクまたは推力を推定する第2出力推定部とから成る出力推定装置と、前記第1および第2出力推定部で求めた推定値を入力し、あらかじめ設定された設定値と比較する指令回路を備え、前記指令回路は、入力された2つの推
定値の差が前記設定値を超えたとき、前記三相同期モータを停止させる指令をモータ制御装置に出力する。
(実施の形態1)
本発明の実施の形態1について、図1、図2および図3を用いて説明する。図1は、モータ制御装置の外部に出力推定装置(トルク推定装置)を装備したモータ制御システムのブロック図を示している。各ブロックの役割を以下に説明する。

数の最大値であり、駆動モータによって定まる既知数である。
(実施の形態2)
本発明の実施の形態2について図4から図6を用いて説明する。実施の形態1と異なるのは、モータ電流の波高値を検出する構成であり、この点を中心に説明する。
(実施の形態3)
実施の形態1および2では、モータ電流検出部において二相分のモータ電流を検出したが、実施の形態3は、三相分のモータ電流を検出する。このため、実施の形態1および2における電流演算器の演算が不要となる。以下、相違点を中心に説明する。
交磁束数のばらつきによって求めることができ、一般的な用途でトータルの検出誤差として±5〜10%程度であるので、検出誤差範囲として10〜15%に設定すればよい。このばらつき範囲は、トルク検出器等の外部に測定器を接続する方式では精度は数%内であるが、電流と電圧から演算する方法や、電流とロータの位置情報から求める方法では、同じばらつき要因となるので、本方式の出力推定精度は十分に使用できるレベルである。
(実施の形態4)
本発明の実施の形態4について説明する。実施の形態1から3と異なるのは、新たに指令回路を設けた点であり、この点を中心に説明する。
(実施の形態5)
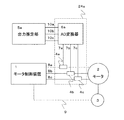
本発明の実施の形態5について説明する。実施の形態1から3と異なるのはモータ電流検出部や出力推定部をモータ制御装置1の外側ではなく、モータ制御装置1内に設けた点である。
なモータ制御装置が備えている少なくとも2つの電流検出器を利用して実施の形態1および2と同様に二相分のモータ電流のみを検出する構成としてもよい。
(実施の形態6)
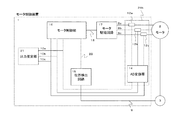
本発明の実施の形態6について説明する。実施の形態5と異なるのは指令回路をモータ制御装置の外側に設けて三相同期モータの出力異常を監視する点であり、この点を中心に説明する。
(実施の形態7)
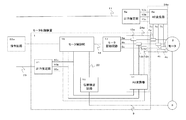
本発明の実施の形態7について説明する。実施の形態1−6までと異なるのは出力推定部とモータ電流検出部をモータ制御装置の内部と外部の両方に設けた点であり、この点を中心に説明する。
部とトルク推定部の結果を指令回路で比較して異常状態の確認を行うため、より安全性の高いシステムを構成することができる。
2 三相同期モータ
3 位置センサ
4a、4b、4c 電流検出器
5、5a、5c 出力推定部
6、6a AD変換器
7a、7b、7c 各相のモータ検出電流(アナログ値)
8a、8b、8c 各相のモータ電流
9 位置情報シリアル通信データ
10a、10b、10c 各相のモータ検出電流(ディジタル値)
12a、12b、12c 電流検出器(モータ制御装置内)
14 AD変換器(モータ制御装置内)
15 位置検出回路(モータ制御装置内)
16 モータ制御部
17 モータ駆動回路
18 各相PWM信号
20 位置情報
21 出力推定部(モータ制御装置内)
22、22a 指令回路
23 トルク推定値
24、24a、24b モータ電流検出部
25 電流演算器
26a、26b I/Fデータ
30、30a 交点検出器
31a、31b、31c 各相のピーク検出器
32 出力演算器
33a、33b、33c 各相のピーク更新器
Claims (9)
- 三相同期モータの少なくとも二相分のモータ電流の電流値を検出するモータ電流検出部と、
前記モータ電流検出部で検出した二相分のモータ電流を用いて三相分のモータ電流を演算で求める電流演算器と、
前記電流演算器で求めた三相分のモータ電流から前記三相同期モータが出力しているトルクまたは推力を推定する出力推定部を備え、
前記出力推定部は、前記電流演算器で検出した三相分のモータ電流から二相のモータ電流の交点を検出して他相のモータ電流から波高値を求め、前記モータ電流の波高値を用いて出力を推定することを特徴とする出力推定装置。 - 前記出力推定部は、前記電流演算器で求めた三相分のモータ電流から二相のモータ電流の交点を検出し、極性が正である交点間でモータ電流の波高値を求め、または極性が負である交点間でモータ電流の波高値を求め、前記モータ電流の波高値を用いて出力を推定することを特徴とする出力推定装置。
- 前記モータ電流検出部は、三相分のモータ電流の電流値を検出し、二相分のモータ電流を加算して符号反転した値と残り一相の電流値を比較し、値が異なる場合に異常と判定する請求項1または請求項2に記載の出力推定装置。
- 前記出力推定部で求めた推定値を入力して出力上限設定値と比較し、前記出力上限設定値を超えた場合に、前記三相同期モータを停止させる指令を生成する指令回路を設けた請求項1から請求項3のいずれか1項に記載の出力推定装置。
- 前記出力推定部で求めた推定値を入力して出力上限設定値と比較し、前記出力上限設定値を超えた場合に、モータ出力を低減させる指令を生成する指令回路を設けた請求項1から請求項3のいずれか1項に記載の出力推定装置。
- 三相同期モータを正弦波駆動で駆動するモータ制御装置において、
前記三相同期モータのモータ電流の電流値を検出するモータ電流検出部と、
前記モータ電流検出部で検出した三相分のモータ電流から前記三相同期モータが出力しているトルクまたは推力を推定する出力推定部を備え、
前記出力推定部は、前記モータ電流検出部で検出した三相分のモータ電流から二相のモータ電流の交点を検出して他相のモータ電流から波高値を求め、前記モータ電流の波高値を用いて出力を推定することを特徴とするモータ制御装置。 - 前記出力推定部は、前記電流演算器で求めた三相分のモータ電流から二相のモータ電流の交点を検出し、極性が正である交点間でモータ電流の波高値を求め、または極性が負である交点間でモータ電流の波高値を求め、前記モータ電流の波高値を用いて出力を推定することを特徴とするモータ制御装置。
- 請求項6または請求項7に記載のモータ制御装置の外部に出力上限設定値を設けた指令回路を備え、
前記モータ制御装置の出力推定部で求めた推定値を前記指令回路に入力して出力上限設定値と比較し、前記推定値が出力上限設定値を超えたとき、
前記指令回路は、前記モータ制御装置に対して三相同期モータを停止させる指令を出力するモータ制御システム。 - 三相同期モータを正弦波駆動で駆動するモータ制御システムにおいて、
三相同期モータと、
前記三相同期モータのモータ電流の電流値を検出する第1モータ電流検出部が検出した三相分のモータ電流から前記三相同期モータが出力しているトルクまたは推力を推定する第1出力推定部を有するモータ制御装置と、
前記モータ制御装置の外に設けた第2モータ電流検出部が検出した三相分のモータ電流から前記三相同期モータが出力しているトルクまたは推力を推定する第2出力推定部とから成る出力推定装置と、
前記第1および第2出力推定部で求めた推定値を入力し、あらかじめ設定された設定値と比較する指令回路を備え、
前記指令回路は、入力された2つの推定値の差が前記設定値を超えたとき、前記三相同期モータを停止させる指令をモータ制御装置に出力することを特徴とするモータ制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162913A JP5396754B2 (ja) | 2008-06-23 | 2008-06-23 | 出力推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162913A JP5396754B2 (ja) | 2008-06-23 | 2008-06-23 | 出力推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010004696A true JP2010004696A (ja) | 2010-01-07 |
| JP5396754B2 JP5396754B2 (ja) | 2014-01-22 |
Family
ID=41585919
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008162913A Expired - Fee Related JP5396754B2 (ja) | 2008-06-23 | 2008-06-23 | 出力推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5396754B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012105455A (ja) * | 2010-11-10 | 2012-05-31 | Hitachi Industrial Equipment Systems Co Ltd | モータ制御装置 |
| JP2013523077A (ja) * | 2010-03-22 | 2013-06-13 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 電気駆動機の出力トルクを求める方法及び装置 |
| JP2019154143A (ja) * | 2018-03-02 | 2019-09-12 | 株式会社東芝 | モータ駆動装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06253585A (ja) * | 1993-02-25 | 1994-09-09 | Nippondenso Co Ltd | ブラシレスモータの異常検出装置 |
| JPH06327283A (ja) * | 1993-05-13 | 1994-11-25 | Shinko Electric Co Ltd | 永久磁石式同期電動機のトルク制御方法とこの制御方法を用いた永久磁石式同期電動機のトルク制御装置 |
| JP2000184732A (ja) * | 1998-12-15 | 2000-06-30 | Hitachi Ltd | インバータ装置 |
| JP2001016884A (ja) * | 1999-06-30 | 2001-01-19 | Kawasaki Steel Corp | 電動機の過電流事故防止制御方法 |
| JP2002359996A (ja) * | 2001-05-31 | 2002-12-13 | Toyota Motor Corp | 交流電動機の駆動制御装置 |
-
2008
- 2008-06-23 JP JP2008162913A patent/JP5396754B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06253585A (ja) * | 1993-02-25 | 1994-09-09 | Nippondenso Co Ltd | ブラシレスモータの異常検出装置 |
| JPH06327283A (ja) * | 1993-05-13 | 1994-11-25 | Shinko Electric Co Ltd | 永久磁石式同期電動機のトルク制御方法とこの制御方法を用いた永久磁石式同期電動機のトルク制御装置 |
| JP2000184732A (ja) * | 1998-12-15 | 2000-06-30 | Hitachi Ltd | インバータ装置 |
| JP2001016884A (ja) * | 1999-06-30 | 2001-01-19 | Kawasaki Steel Corp | 電動機の過電流事故防止制御方法 |
| JP2002359996A (ja) * | 2001-05-31 | 2002-12-13 | Toyota Motor Corp | 交流電動機の駆動制御装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013523077A (ja) * | 2010-03-22 | 2013-06-13 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 電気駆動機の出力トルクを求める方法及び装置 |
| JP2012105455A (ja) * | 2010-11-10 | 2012-05-31 | Hitachi Industrial Equipment Systems Co Ltd | モータ制御装置 |
| JP2019154143A (ja) * | 2018-03-02 | 2019-09-12 | 株式会社東芝 | モータ駆動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5396754B2 (ja) | 2014-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7733044B2 (en) | IPM motor system and control method thereof | |
| CN101809857B (zh) | 旋转电机的控制装置 | |
| US7271557B2 (en) | AC motor driving apparatus and method of controlling the same | |
| JP4909797B2 (ja) | モータ制御装置 | |
| KR101046802B1 (ko) | 교류 회전기의 제어 장치 및 이 제어 장치를 사용한 교류회전기의 전기적 정수 측정 방법 | |
| JP2004312834A (ja) | モータ駆動制御装置および電動パワーステアリング装置 | |
| JP2008067556A (ja) | モータ制御装置 | |
| KR20130106505A (ko) | 센서리스 제어 방법 및 장치 | |
| KR20170033578A (ko) | 유도 전동기의 제정수 추정 방법 | |
| JP4010195B2 (ja) | 永久磁石式同期モータの制御装置 | |
| CN111034013B (zh) | 三相同步电动机的控制装置和使用其的电动助力转向装置 | |
| KR20160065291A (ko) | 전동기 구동 모듈 | |
| WO2019150984A1 (ja) | 三相同期電動機の制御装置 | |
| JP5396754B2 (ja) | 出力推定装置 | |
| EP1852966A1 (en) | Ipm motor system and its control method | |
| JP2010051151A (ja) | モータ制御装置 | |
| CN101821942A (zh) | 电动机控制装置与磁极位置估计方法 | |
| JP5574925B2 (ja) | 位置・速度センサレス制御装置 | |
| JP5320826B2 (ja) | 出力推定装置、それを用いたモータ制御装置およびモータ制御システム | |
| JP2000175485A (ja) | 同期モ―タ制御装置及び電気車制御装置並びに同期モ―タ制御方法 | |
| JP2021002949A (ja) | 永久磁石同期電動機の駆動装置、駆動方法および電気車 | |
| JP4735439B2 (ja) | 永久磁石式同期電動機の初期磁極位置推定装置 | |
| JP7405696B2 (ja) | 同期電動機の駆動装置および同期電動機の駆動方法 | |
| JP7172910B2 (ja) | 電動機の制御装置 | |
| KR100637383B1 (ko) | 자속 관측기를 이용한 유도 전동기의 속도 추정 장치 및이를 이용한 제어시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110603 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20110713 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20121213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130329 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131007 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5396754 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |